
Investigation of the Hue–Wavelength Response of a CMOS RGB-Based Image Sensor


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Digital Image Sensor Technology
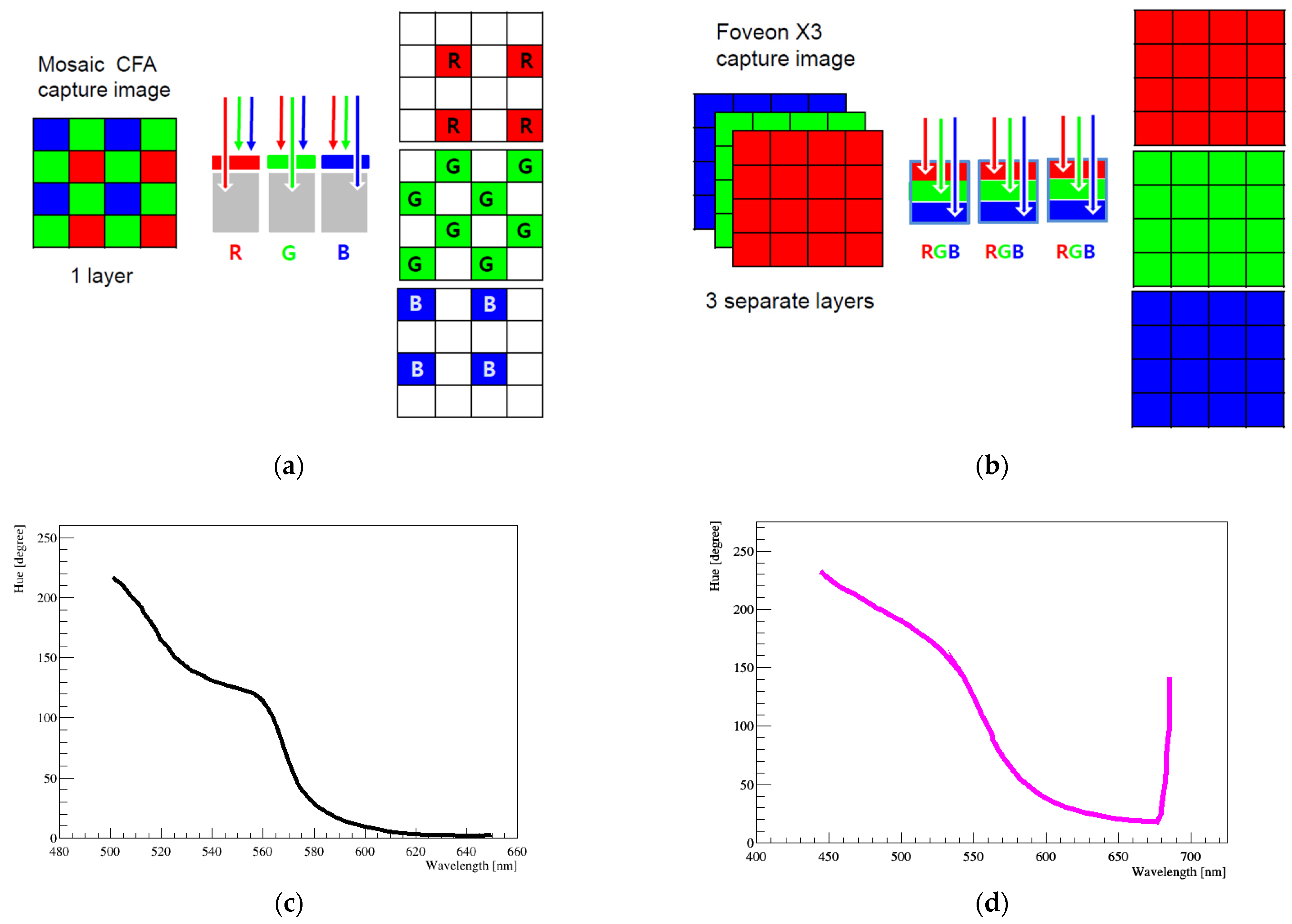
2.1. CMOS Bayer CFA and Foveon Image Sensor Technology
2.2. Image Processing Pipeline and Raw Image Analysis
3. Experimental Set-Up
3.1. Light Source and Diffraction Grating
3.2. Comparison of Theoretical Diffraction Curve and Experimental Measurement
4. Investigation on Various Factors Affecting H-W Curve
4.1. Captured Area and H Distribution
4.2. Investigation Related to Intensity
- (1)
- Exposure time and saturation
- (2)
- Exposure time and H value
- (3)
- ISO number and H value
5. Results
5.1. H-W Result Curve from LED
5.2. Investigation of the H-W Response Using Laser
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- CIE. Commission Internationale de l’Eclairage Proceedings; Cambridge University Press: Cambridge, UK, 1931. [Google Scholar]
- Smith, T.; Guild, J. The CIE. colorimetric standards and their use. Trans. Opt. Soc. 1931, 33, 73–134. [Google Scholar] [CrossRef]
- Smith, A.R. Color Gamut Transform Paris. ACM Siggraph Comput. Graph. 1978, 12, 12–19. [Google Scholar] [CrossRef]
- Chernov, V.; Alander, J.; Bochko, V. Integer-based accurate conversion between RGB and HSV color spaces. Comput. Electr. Eng. 2015, 46, 328–337. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Pearson: London, UK, 2018. [Google Scholar]
- de Oliveira, H.J.S.; de Almeida, P.L., Jr.; Sampaio, B.A.; Fernandes, J.P.A.; Pessoa-Neto, O.D.; de Lima, E.A.; de Almeida, L.F. A-handheld smartphone-controlled spectrophotometer based on hue to wavelength conversion for molecular absorption and emission measurements. Sens. Actuators B 2017, 238, 1084–1091. [Google Scholar] [CrossRef]
- McGregor, T.J.; Jeffries, B.; Spence, D.J.; Coutts, D.W. Three Dimensional Particle Image Velocimetry using Colour Coded Light Sheets. In Proceedings of the Fourth Australian Conference on Laser Diagnostics in Fluid Mechanics and Combustion, The University of Adelaide, McLaren Vale, Australia, 7–9 December 2005. [Google Scholar]
- McGregor, T.J.; Spence, D.J.; Coutts, D.W. Laser-based volumetric colour-coded three-dimensional particle velocimetry. Opt. Lasers Eng. 2007, 45, 882–889. [Google Scholar] [CrossRef]
- Kuehni, R.G. On the relationship between wavelength and perceived hue. Color Res. Appl. 2012, 37, 424–428. [Google Scholar] [CrossRef]
- Pridmore, R.W. Relative wavelength metric for the complete hue cycle: Derivation from complementary wavelengths. Color Res. Appl. 2010, 35, 122–133. [Google Scholar] [CrossRef]
- Drum, B. Hue signals from short- and middle-wavelength-sensitive cones. J. Opt. Soc. Am. 1989, 6, 153–156. [Google Scholar] [CrossRef] [PubMed]
- Ortega, S.; Halicek, M.; Fabelo, H.; Callico, G.M.; Fei, B. Hyperspectral and multispectral imaging in digital and computational pathology: A systematic review. Biomed. Opt. Express. 2020, 11, 3195–3233. [Google Scholar] [CrossRef] [PubMed]
- Mansfield, J.R. Multispectral Imaging: A Review of Its Technical Aspects and Applications in Anatomic Pathology. Vet. Pathol. 2014, 51, 185–210. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Kim, J.; Kim, H.H.; Kim, C.S.; Kim, J. Review on Optical Imaging Techniques for Multispectral Analysis of Nanomaterials. Nanotheranostics 2022, 6, 50–61. [Google Scholar] [CrossRef] [PubMed]
- Ramanath, R.; Snyder, W.E.; Bilbro, G.L. Demosaicking methods for Bayer color arrays. J. Electron Imaging 2002, 11, 306–315. [Google Scholar] [CrossRef]
- Gunturk, B.K.; Glotzbach, J.; Altunbasak, Y.; Schafer, R.W.; Mersereau, R.M. Demosaicking: Color filter array interpolation. IEEE Signal Process Mag. 2005, 22, 44–54. [Google Scholar] [CrossRef]
- Jeong, K.; Kim, J.; Kang, M.G. Color Demosaicing of RGBW Color Filter Array Based on Laplacian Pyramid. Sensors 2022, 22, 2981. [Google Scholar] [CrossRef] [PubMed]
- Fossum, E.R. CMOS image sensors: Electronic camera-on-a-chip. IEEE Trans. Electron Devices 1997, 44, 1689–1698. [Google Scholar] [CrossRef]
- Uwaerts, D.; Ogiers, W.; Seijnaeve, J.; Scheffer, D.; Dierickx, B.; Hermans, L.; Bogaerts, J. Recent developments in high-end CMOS image sensors. Int. Conf. Space Opt. 2017, 10569, 291–299. [Google Scholar] [CrossRef] [Green Version]
- Fontaine, R. Recent innovations in CMOS image sensors. In Proceedings of the 2011 IEEE/SEMI Advanced Semiconductor Manufacturing Conference, Saratoga Springs, NY, USA, 16–18 May 2011. [Google Scholar]
- Yokogawa, S. Nanophotonics contributions to state-of-the-art CMOS Image Sensors. In Proceedings of the 2019 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 7–11 December 2019. [Google Scholar]
- Yoshida, M.; Sonoda, T.; Nagahara, H.; Endo, K.; Sugiyama, Y.; Taniguchi, R.I. High-Speed Imaging Using CMOS Image Sensor with Quasi Pixel-Wise Exposure. IEEE Trans. Comput. Imaging 2020, 6, 463–476. [Google Scholar] [CrossRef]
- Kim, Y.; Ryu, H.; Lee, S.; Lee, Y.J. Joint Demosaicing and Denoising Based on Interchannel Nonlocal Mean Weighted Moving Least Squares Method. Sensors 2020, 20, 4697. [Google Scholar] [CrossRef] [PubMed]
- Maitre, H. From Photon to Pixel, 2nd ed.; Wiley: Hoboken, NJ, USA, 2017. [Google Scholar]
- Miler, H. Color filter array for CCD and CMOS image sensors using a chemically amplified, thermally cured, pre-dyed, positive tone photoresist for 365 nm lithography. Proc. SPIE 1999, 3678, 1083–1090. [Google Scholar]
- Süsstrunk, S.; Buckley, R.; Swen, S. Standard RGB Color Spaces. Color Imaging Conf. 1999, 127–134. [Google Scholar]
- ISO 2720:1974; General Purpose Photographic Exposure Meters (Photoelectric Type)—Guide to Product Specification. International Organization for Standardization (ISO): London, UK, 1974.
- Canon 450D XSi. Available online: https://maxmax.com/canon_450d_xsi.htm (accessed on 5 November 2022).










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, H.-W.; Choi, J.-W.; Choi, J.-Y.; Joo, K.-K.; Kim, N.-R. Investigation of the Hue–Wavelength Response of a CMOS RGB-Based Image Sensor. Sensors 2022, 22, 9497. https://doi.org/10.3390/s22239497
Park H-W, Choi J-W, Choi J-Y, Joo K-K, Kim N-R. Investigation of the Hue–Wavelength Response of a CMOS RGB-Based Image Sensor. Sensors. 2022; 22(23):9497. https://doi.org/10.3390/s22239497
Chicago/Turabian StylePark, Hyeon-Woo, Ji-Won Choi, Ji-Young Choi, Kyung-Kwang Joo, and Na-Ri Kim. 2022. "Investigation of the Hue–Wavelength Response of a CMOS RGB-Based Image Sensor" Sensors 22, no. 23: 9497. https://doi.org/10.3390/s22239497
APA StylePark, H. -W., Choi, J. -W., Choi, J. -Y., Joo, K. -K., & Kim, N. -R. (2022). Investigation of the Hue–Wavelength Response of a CMOS RGB-Based Image Sensor. Sensors, 22(23), 9497. https://doi.org/10.3390/s22239497