
The Large-Scale Physical Model Tests of the Passing Ship Effect on a Ship Moored at the Solid-Type Berth


Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurement of Interaction Forces Generated on the Moored Ship Model
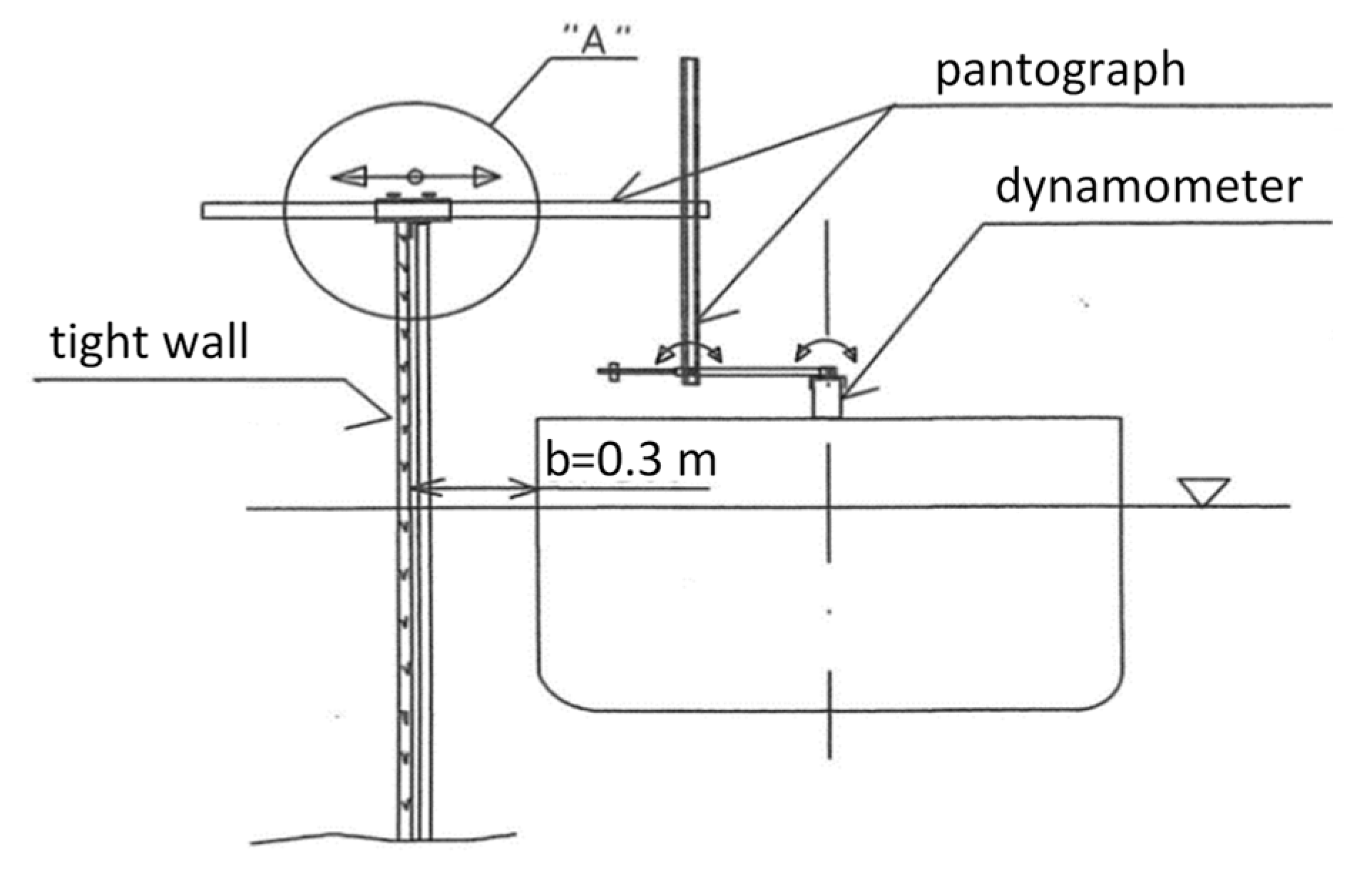
2.2. Measuring Sensors and Procedure
3. Results
4. Discussion
5. Conclusions
- The results presented in Figure 13 and Figure 14 confirmed the general dependence of the forces in shallow-water conditions. The forces generated in shallow water at much smaller Froude numbers Fn = 0.07 [17] and Fn = 0.08 [25] were not less than forces generated at Fn = 0.12 and Fn = 0.15 in deep water.
- The effect of moored ship’s earlier reaction to a ship passing at a slower speed than that of a vessel passing at higher speed had been noticed by Huang and Chen [9], who explained this phenomenon as an earlier attainment of the maximum value by force at lower speed than at higher speed. It is more pronounced at shorter passing distances at s = 1 and s = 2 (Figure 7a or Figure 8a).
- The main objective of this work was to expand the experimental database for mooring loads generated by a passing ship; therefore, in this study, raw measurements are presented.
- The comparative results of model tests and numerical simulations were available in filtered form, without higher frequency oscillations, which have a small effect on the moored ship. This small effect is caused by high inertia of the moored ship [17,18,21]. Swiegers [17] and Kriebel [18] determined the minimum and maximum surge and sway forces using the smoothed time history of passing ship forces. Kriebel [18], in the analysis of results of model tests in 1:135 scale, used a low-pass filter with 2 Hz cut-off frequency, isolating low frequency loads.
- Raw data are overestimated in relation to filtered data. However, due to different experimental conditions, e.g., large-scale and self-propelled manned model, it was only possible to show that the obtained measurements were close to other results and had a similar trend of changes, depending on the influencing parameters.
- 4.
- 5.
- Passing ship forces increase significantly if the passing ship sails at a drift angle [13]. Changing speed and course of a ship changes the phase and magnitude of the fluid forces. In the presented research, the reactions of the passing self-propelled manned ship model were compensated by the corrections of the propeller thrust and rudder angle, which enabled the maintenance of a constant course and constant speed in all tests.
Author Contributions
Funding
Conflicts of Interest
References
- Flory, J.; Evans, J.; Weller, S.; Fenical, S.; Salcedo, F. Neural Network Analysis of Passing Ship Forces and Moments in Confined Channels. In Proceedings of the Oceans 2019 MTS/IEEE Seattle, Seattle, WA, USA, 27–31 October 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Vidmar, P.; Perkovic, M.; Gucma, L.; Lazuga, K. Risk Assessment of Moored and Passing Ships. Appl. Sci. 2020, 10, 6825. [Google Scholar] [CrossRef]
- Lebkowski, A. Design of an autonomous transport system for coastal areas. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Gerigk, M.K.; Wojtowicz, S. An Integrated Model of Motion, Steering, Positioning and Stabilization of an Unmanned Autonomous Maritime Vehicle. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 591–596. [Google Scholar] [CrossRef] [Green Version]
- Van Zwijnsvoorde, T.; Vantorre, M. Safe Mooring of Large Container Ships at Quay Walls Subject to Passing Ship Effects. Int. J. Marit. Eng. 2017, 159, 367–375. [Google Scholar] [CrossRef]
- Van Zwijnsvoorde, T.; Vantorre, M.; Ides, S. Container Ships Moored at the Port of Antwerp: Modelling Respsonse to Passing Vessels. In Proceedings of the 34th PIANC World Congress, Panama City, Panama, 7–11 May 2018. [Google Scholar]
- PIANC Report WG24. Criteria for Movements of Moored Ships in Harbours. 1995. Available online: https://www.pianc.org/publications/marcom/criteria-for-movements-of-moored-ships-in-harbours-a-practical-guide (accessed on 15 November 2021).
- Wang, S. Dynamic Effects of Ship Passage on Moored Vessels. J. Waterw. Harb. Coast. Eng. Div. 1975, 101, 247–258. [Google Scholar] [CrossRef]
- Huang, E.T.; Chen, H.-C. Passing Ship Effects on Moored Vessels at Piers. MOTEMS. 2006. Available online: https://www.slc.ca.gov/wp-content/uploads/2018/08/PF2006-MOTEMS-Passing-Paper.pdf (accessed on 15 November 2021).
- Huang, E.T.; Chen, H.-C.; Chen, C.-R. Engineering Concerns of Passing Ship Effect at Typical Waterfronts. In Proceedings of the the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Paulauskas, V.; Filina-Dawidowicz, L.; Paulauskas, D. Ships speed limitations for reliable maintenance of the quay walls of navigation channels in ports. Maint. Reliab. 2020, 22, 306–315. [Google Scholar] [CrossRef]
- Vasudevan, N.; Nallayarasu, S. Simulation of passing vessel effects on moored vessel mooring response due to environmental loads. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering (OMAE2017), Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Van Wijhe, H.J.; Pinkster, J.A. The effects of ships passing moored container vessels in the Yangtzehaven, Port of Rotterdam. In Proceedings of the International Conference on Safety and Operations in Canals and Waterways, Glasgow, UK, 15–16 September 2008; pp. 117–130. [Google Scholar]
- Remery, G.F.M. Mooring forces induced by passing ships. In Proceedings of the Offshore Technology Conference, Dallas, TX, USA, 6–8 May 1974. [Google Scholar]
- Muga, B.J.; Fang, S.J. Passing Ship Effects-From Theory and Experiment. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 1975. [Google Scholar] [CrossRef]
- Van der Molen, W.; Moes, J.; Swiegers, P.B.; Vantorre, M. Calculation of Forces on Moored Ships due to Passing Ships. In Proceedings of the 2nd International Conference on Ship Manoeuvring in Shallow and Confined Water: Ship to Ship interaction, Trondheim, Norway, 18–20 May 2011. [Google Scholar]
- Swiegers, P.B. Calculation of the Forces on a Moored Ship due to a Passing Container Ship. Master’s Thesis, Stellenbosch University, Stellenbosch, South Africa, 2011. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.1020.4780&rep=rep1&type=pdf (accessed on 15 November 2021).
- Kriebel, D. Mooring Loads Due to Parallel Passing Ships; Technical Report TR-6056-OCN; Naval Facilities Engineering Service Center: Port Hueneme, CA, USA; Engineering Innovation & Criteria Office: Port Hueneme, CA, USA, 2005; Available online: https://www.yumpu.com/en/document/view/11487238/mooring-loads-due-to-parallel-passing-ships-state-lands- (accessed on 15 November 2021).
- Göransson, G.; Larson, M.; Althage, J. Ship-Generated Waves and Induced Turbidity in the Göta Älv River in Sweden. J. Waterw. Port Coast. Ocean Eng. 2014, 140, 04014004. [Google Scholar] [CrossRef]
- Kurdistani, S.M.; Tomasicchio, G.R.; D’Alessandro, F.; Hassanabadi, L. River bank protection from ship-induced waves and river flow. Water Sci. Eng. 2019, 12, 129–135. [Google Scholar] [CrossRef]
- Nam, B.W.; Park, J.-Y. Numerical simulation for a passing ship and a moored barge alongside quay. Int. J. Nav. Archit. Ocean. Eng. 2018, 10, 566–582. [Google Scholar] [CrossRef]
- Park, J.-Y.; Nam, B.W.; Kim, Y. Numerical Analysis of Hydrodynamic Loads on Passing and Moored Ships in Shallow Water. Processes 2021, 9, 558. [Google Scholar] [CrossRef]
- Flory, J.; Fenical, S. Passing-Ship Effects in Confined Waterways. In Proceedings of the California State Lands Commission, Prevention 1st 2010, Long Beach, CA, USA, 19–20 October 2010; Available online: https://www.scribd.com/document/313098213/2010-Flory-and-Fenical-Passing-ship-effects-in-confined-waterways-Oct-19-pdf (accessed on 15 November 2021).
- Fenical, S.W. Predicting and Mitigating Passing Ship Surge Effects in Harbors; Webinar on August 22; Mott MacDonald: Croydon, UK, 2018; Available online: https://aapa.files.cms-plus.com/2018Seminars/Ship%20Surge%20Effects%20Webinar%20Fenical.pdf (accessed on 15 November 2021).
- Abramowicz-Gerigk, T.; Gerigk, M.K. Experimental study on the selected aspects of bow thruster generated flow field at ship zero-speed conditions. Ocean Eng. 2020, 209, 107463. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
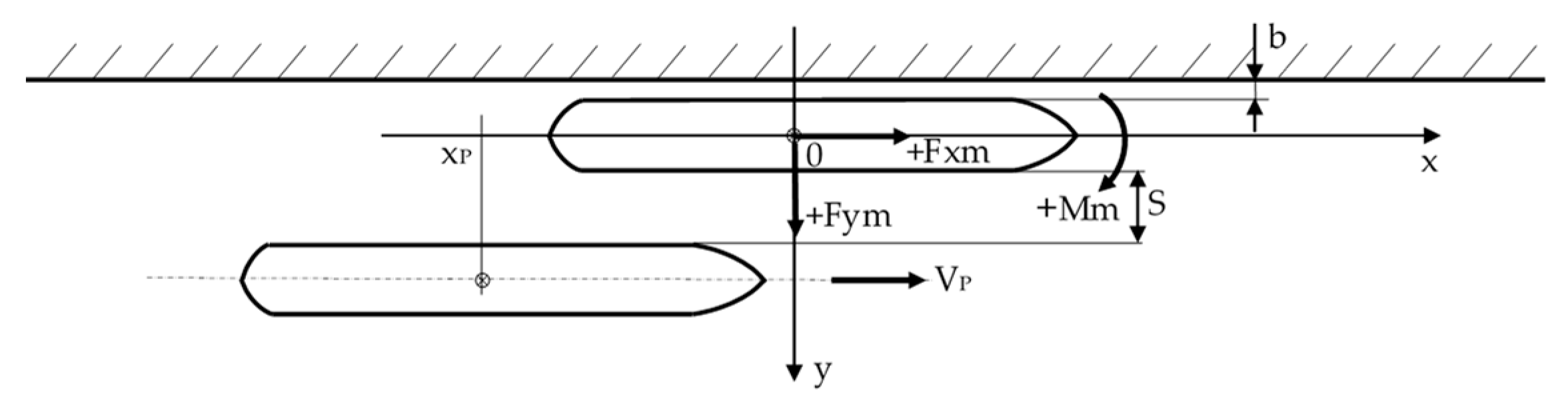
| Parameter | Description |
|---|---|
| B | moored ship breadth |
| b | gap distance between moored ship side and wall |
| D | ship draft |
| Fx, Fy | surge and sway forces |
| h | water depth |
| L | overall moored ship length |
| LWL | passing ship length at waterline |
| M | yaw moment |
| m | subscript for the moored ship model |
| P | subscript for passing ship model |
| S | separation distance between moored and passing ship |
| s | non-dimensional separation distance |
| T | moored ship draft |
| v | passing ship speed |
| xP | position of the midship of the passing ship model |
| 1:λ | geometrical model scale |
| Ship Model | L | LWL | B | D |
|---|---|---|---|---|
| m | m | m | m | |
| Moored ship model | 9.49 | 9.0 m | 1.26 m | 0.51 |
| Passing ship model | 9.17 | 9.3 m | 1.34 m | 0.52 |
| s = 1 | s = 2 | s = 3 | ||||||
|---|---|---|---|---|---|---|---|---|
| Fn | vP | v | Fn | vP | v | Fn | vP | v |
| m/s | m/s | m/s | m/s | m/s | m/s | |||
| 0.059 0.117 0.140 0.145 | 0.56 1.11 1.33 1.38 | 2.7 5.5 6.5 6.7 7.2 | 0.049 0.080 0.119 0.155 0.199 | 0.46 0.76 1.12 1.13 1.47 | 2.3 3.7 5.5 5.6 7.2 | 0.062 0.084 0.104 0.124 0.148 | 0.59 0.80 0.99 1.18 1.41 | 2.9 3.9 4.8 5.8 6.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abramowicz-Gerigk, T.; Burciu, Z.; Jaworski, T.; Nowicki, J. The Large-Scale Physical Model Tests of the Passing Ship Effect on a Ship Moored at the Solid-Type Berth. Sensors 2022, 22, 868. https://doi.org/10.3390/s22030868
Abramowicz-Gerigk T, Burciu Z, Jaworski T, Nowicki J. The Large-Scale Physical Model Tests of the Passing Ship Effect on a Ship Moored at the Solid-Type Berth. Sensors. 2022; 22(3):868. https://doi.org/10.3390/s22030868
Chicago/Turabian StyleAbramowicz-Gerigk, Teresa, Zbigniew Burciu, Tomasz Jaworski, and Jacek Nowicki. 2022. "The Large-Scale Physical Model Tests of the Passing Ship Effect on a Ship Moored at the Solid-Type Berth" Sensors 22, no. 3: 868. https://doi.org/10.3390/s22030868
APA StyleAbramowicz-Gerigk, T., Burciu, Z., Jaworski, T., & Nowicki, J. (2022). The Large-Scale Physical Model Tests of the Passing Ship Effect on a Ship Moored at the Solid-Type Berth. Sensors, 22(3), 868. https://doi.org/10.3390/s22030868