
Accurate Real-Time Localization Estimation in Underground Mine Environments Based on a Distance-Weight Map (DWM)


Abstract
:1. Introduction
- (1)
- A novel method for the only 3D LIDAR information to obtain accurate 3D localization of the underground mine environment. At the same time, the influence of roadway segmentation and initial position on roadway scene localization was explored.
- (2)
- A novel method for generating an accurate map based on IDW suitable for performing localization in an underground environment.
- (3)
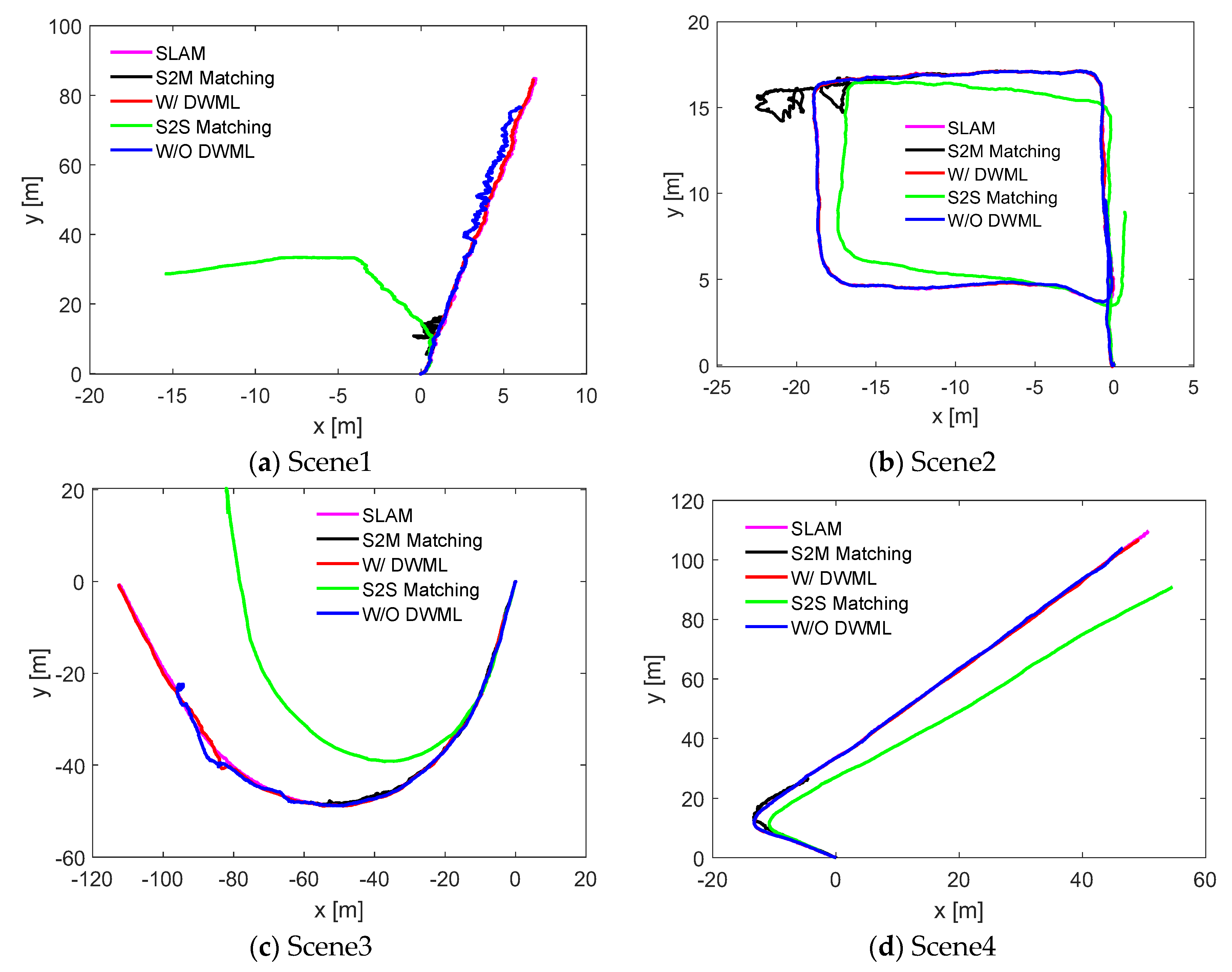
- An evaluation of the proposed approach was tested in four underground scenes, including a smooth straight roadway, smooth loop roadway, rough curved roadway, and rough slope roadway. The localization data can basically cover underground, trackless equipment operation scenes.
2. Algorithm Description
2.1. Overview of the Algorithm
2.2. Offline Map Construction
2.2.1. Point Cloud Map Construction Based on GICP-SLAM
2.2.2. Map Error Analysis
2.2.3. Distance-Weight Map Construction
2.3. Underground Localization
2.3.1. Segmentation of Underground Roadway
2.3.2. Localization Initialization
2.3.3. Underground Localization Based on an Unscented Kalman Filter
- (a)
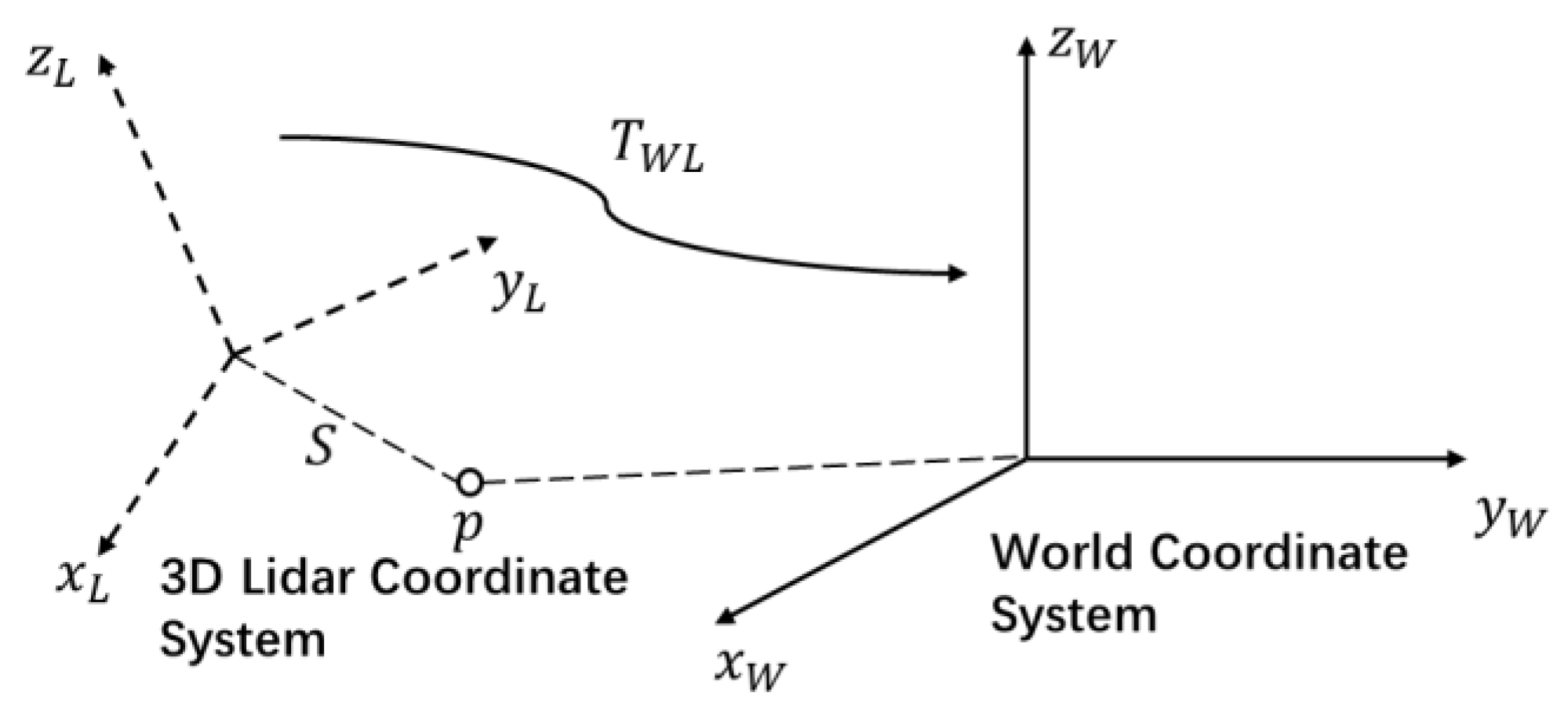
- Localization mathematical model construction
- (b)
- Feature points matching
- (c)
- Prediction model
- (d)
- Correction model
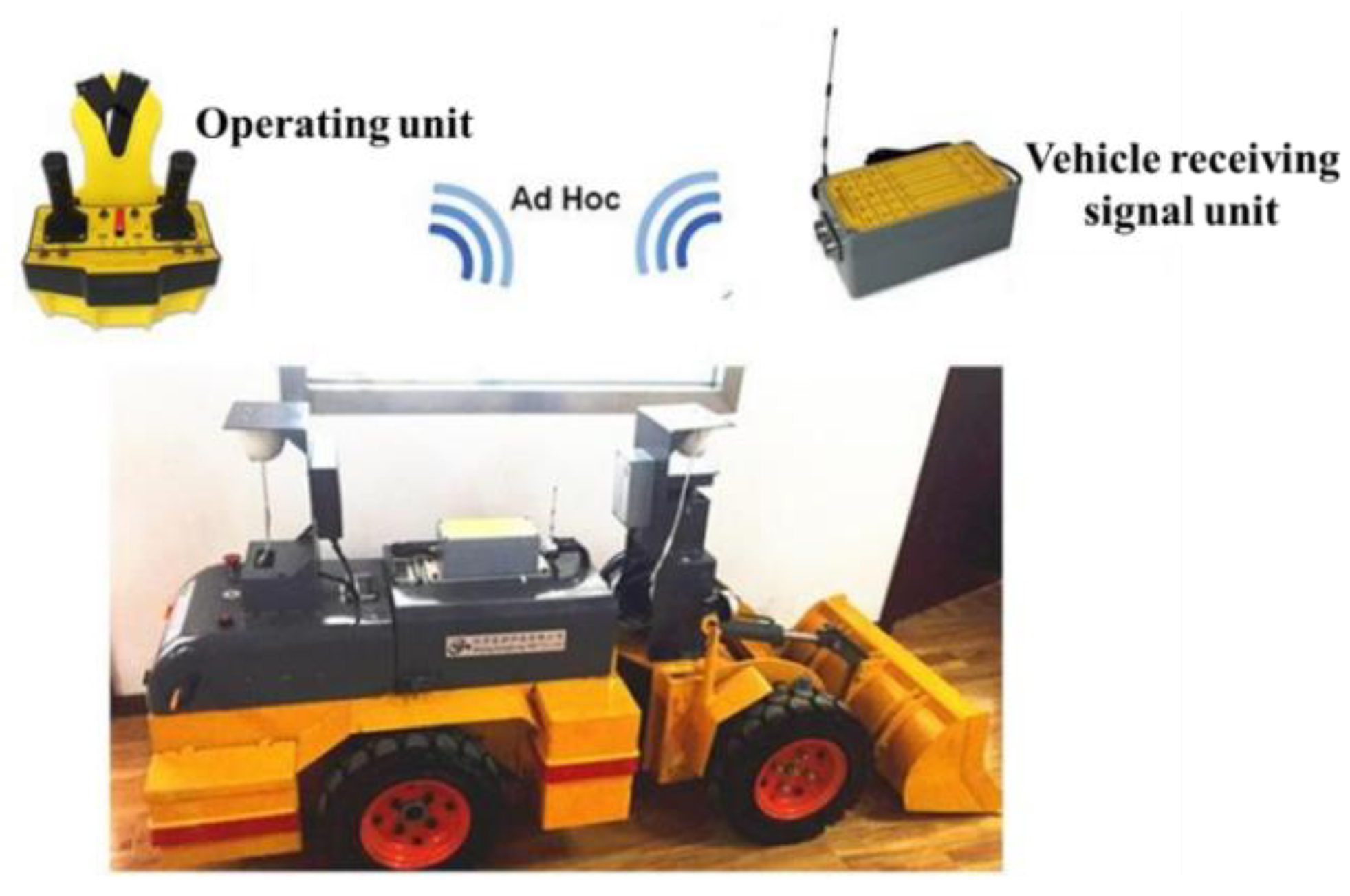
3. Hardware and Map Scenes
4. Results and Discussion
4.1. Trajectory
4.2. Error Analysis
4.3. Time Analysis
4.4. Comparative Analysis of Multiple Localization Methods
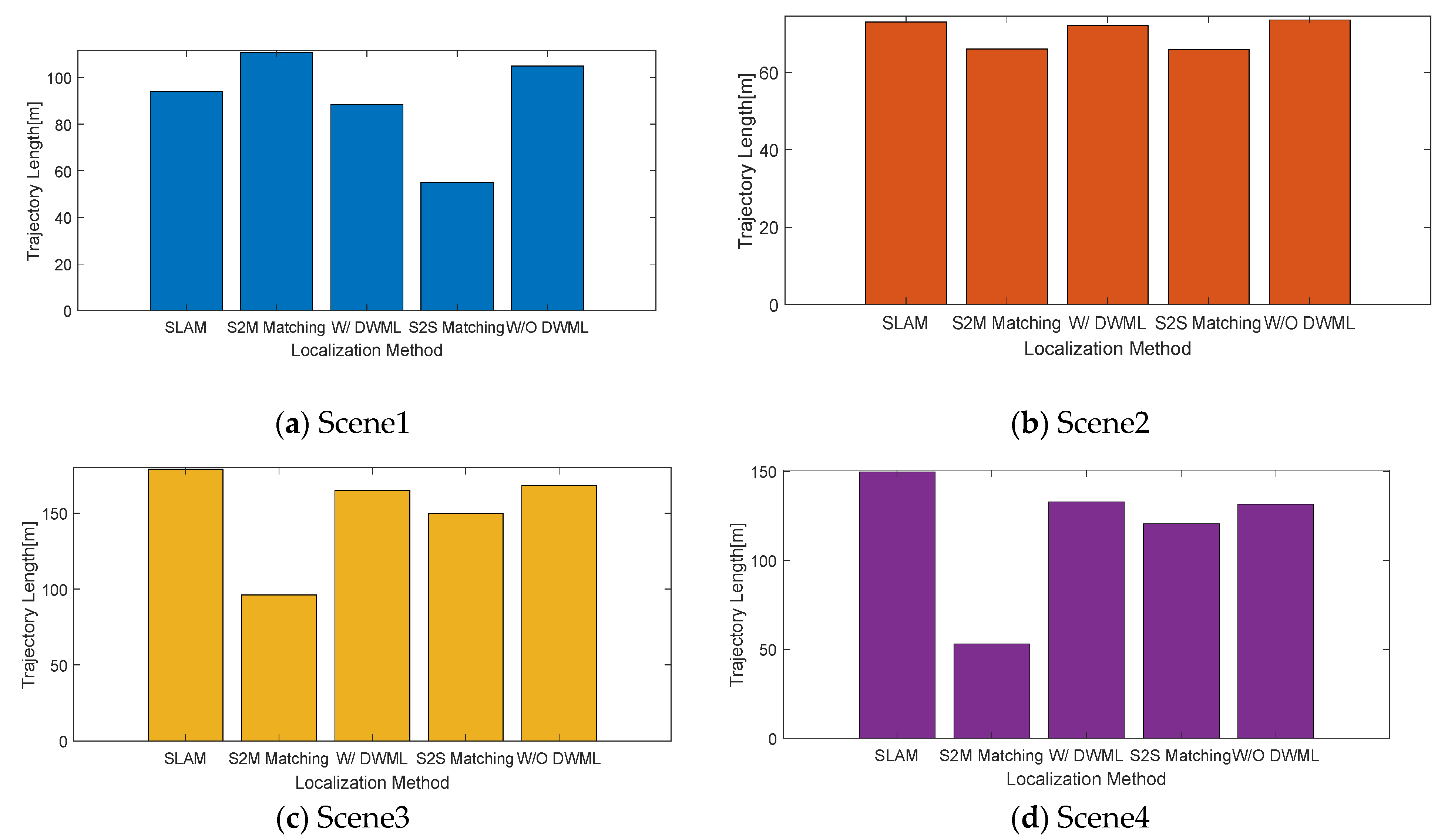
4.5. Walking Distance Analysis
4.6. Analysis of the Initial Position on Localization
4.7. Analysis of the Point Cloud Segmentation on Localization
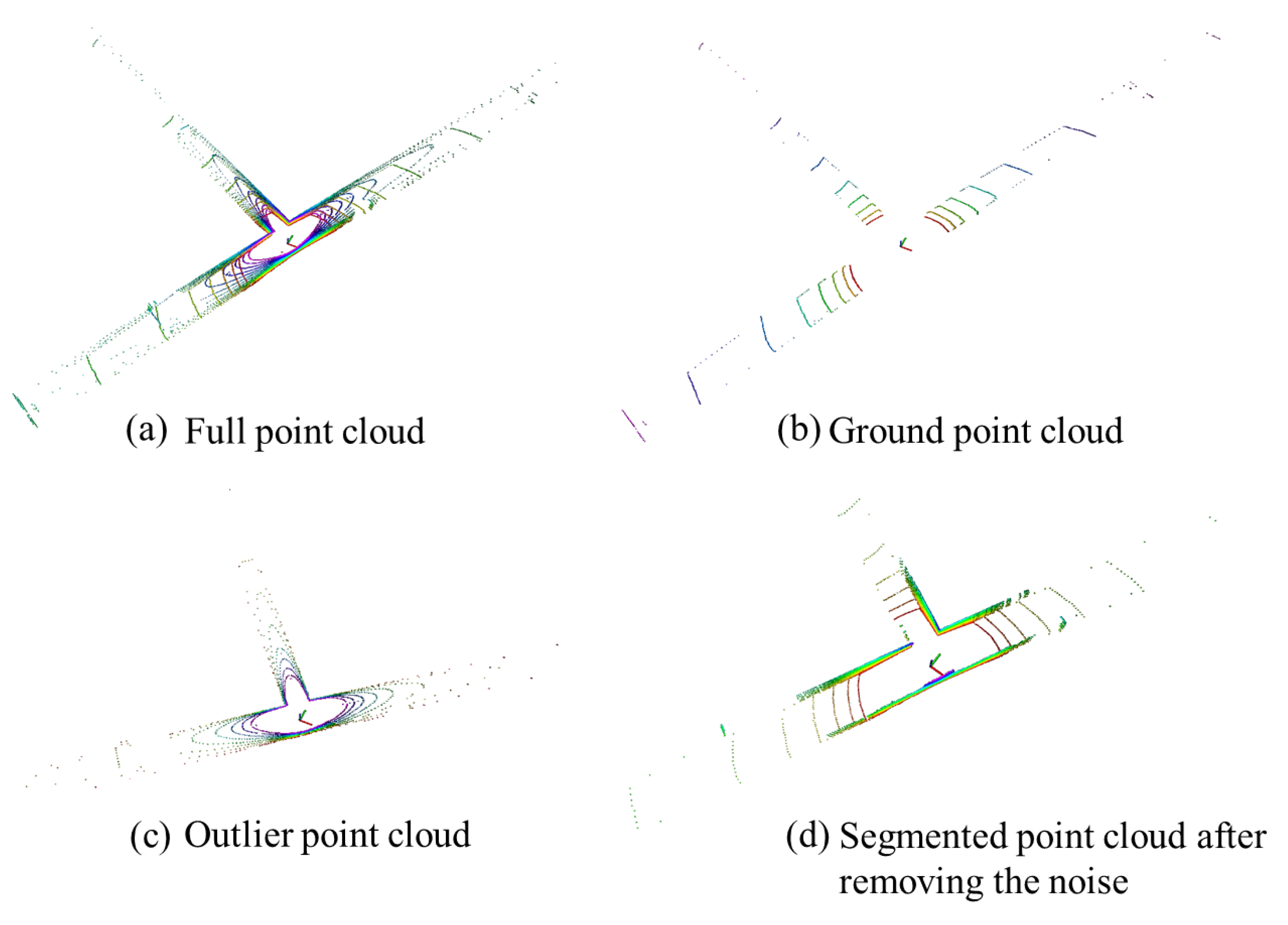
4.7.1. Point Cloud Segmentation Results
4.7.2. Comparison of the Localization Results
4.8. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Zlot, R.; Bosse, M. Efficient large scale three dimensional mobile mapping for underground mines. J. Field Robot. 2014, 31, 758–779. [Google Scholar] [CrossRef]
- Xu, Z.; Yang, W.; You, K.; Li, W.; Kim, Y.-I. Vehicle autonomous localization in local area of coal mine tunnel based on vision sensors and ultrasonic sensors. PLoS ONE 2017, 12, e0171012. [Google Scholar] [CrossRef] [PubMed]
- Zare, M.; Battulwar, R.; Seamons, J.; Sattarvand, J. Applications of Wireless Indoor Positioning Systems and Technologies in Underground Mining: A Review. Mining Metall. Explor. 2021, 38, 2307–2322. [Google Scholar] [CrossRef]
- Ali, M.M.; Youhei, K.; Mostafa, S.; Knox, C.E.; Markus, W.; Hyongdoo, J.; Hirokazu, O. Development of underground mine monitoring and communication system integrated ZigBee and GIS. Int. J. Mining Metall. Explor. 2015, 25, 811–818. [Google Scholar]
- Kent, D. Digital networks and applications in underground coal mines. In Proceedings of the 11th Underground Coal Operators’ Conference, University of Wollongong & the Australasian Institute of Mining and Metallurgy, Wollongong, Australia, 13 March 2011; pp. 181–188. [Google Scholar]
- Lavigne, N.J.; Marshall, J.A. A landmark-bounded method for large-scale underground mine mapping. J. Field Robot. 2012, 29, 861–879. [Google Scholar] [CrossRef]
- Baldwin, I.; Newman, P. Laser-only road-vehicle localization with dual 2D push-broom LIDARS and 3D priors. In Proceedings of the 25th IEEE\RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Elfes, A. Using occupancy grids for mobile robot perception and navigation. Computer 1989, 22, 46–57. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S.; Whittaker, W. Conditional particle filters for simultaneous mobile robot localization and people-tracking. In Proceedings of the 19th IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 11–15 May 2002. [Google Scholar]
- Smith, R.; Self, M.; Cheeseman, P. Estimating uncertain spatial relationships in robotics. In Autonomous Robot Vehicles; Spinger: Berlin/Heidelberg, Germany, 1990; Volume 4, pp. 167–193. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. A probabilistic approach to concurrent mapping and localization for mobile robots. Auton. Robot. 1998, 5, 253–271. [Google Scholar] [CrossRef]
- Nelson, P.; Churchill, W.; Posner, I.; Newman, P. From Dusk till Dawn: Localisation at Night using Artificial Light Sources. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Neubert, P.; Sunderhauf, N.; Protzel, P. Appearance Change Prediction for Long-Term Navigation Across Seasons. In Proceedings of the 6th European Conference on Mobile Robots (ECMR), Barcelona, Spain, 25–27 September 2013. [Google Scholar]
- Milford, M.J.; Jacobson, A. Brain-inspired Sensor Fusion for Navigating Robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Milford, M.J.; Wyeth, G.F. SeqSLAM: Visual Route-Based Navigation for Sunny Summer Days and Stormy Winter Nights. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), St Paul, MA, USA, 14–18 May 2012. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bay, H.; Tuytelaars, T.; Gool, L.V. SURF: Speeded up robust features. In Proceedings of the Computer Vision–ECCV 2006, Graz, Austria, 7–13 May 2006; Leonardis, A., Bischof, H., Pinz, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3951, pp. 404–417. [Google Scholar]
- Hurteau, R.; St-Amant, M.; Laperrière, Y.; Chevrette, G. Optical guidance system for underground mine vehicles. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992. [Google Scholar]
- Kanellakis, C.; Nikolakopoulos, G. Evaluation of Visual Localization Systems in Underground Mining. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016. [Google Scholar]
- Jacobson, A.; Zeng, F.; Smith, D.; Boswell, N.; Peynot, T.; Milford, M. Semi-Supervised SLAM: Leveraging Low-Cost Sensors on Underground Autonomous Vehicles for Position Tracking. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Zeng, F.; Jacobson, A.; Smith, D.; Boswell, N.; Peynot, T.; Milford, M. TIMTAM: Tunnel-Image Texturally Accorded Mosaic for Location Refinement of Underground Vehicles With a Single Camera. IEEE Robot. Autom. Lett. 2019, 4, 4362–4369. [Google Scholar] [CrossRef] [Green Version]
- Kramer, A.; Kasper, M.; Heckman, C. VI-SLAM for Subterranean Environments. In Field and Service Robotics; Ishigami, G., Yoshida, K., Eds.; Springer: Singapore, 2021; Volume 16, pp. 159–172. [Google Scholar]
- Dang, T.; Mascarich, F.; Khattak, S.; Nguyen, H.; Khedekar, N.; Papachristos, C.; Alexis, K. Field-hardened robotic autonomy for subterranean exploration. In Proceedings of the Field and Service Robotics (FSR), Tokyo, Japan, 3 September 2019. [Google Scholar]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceedings of the Robotics: Science and Systems Conference, Berkeley, CA, USA, 12–14 July 2014. [Google Scholar]
- Kim, D.; Chung, T.; Yi, K. Lane Map Building and Localization for Automated Driving Using 2D Laser Rangefinder. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium, Seoul, Korea, 28 June–1 July 2015. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved techniques for grid mapping with Rao-Blackwellized particle filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef] [Green Version]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM: A factored solution to the simultaneous localization and mapping problem. In Proceedings of the AAAI National Conference on Artificial Intelligence, San Jose, CA, USA, 27–29 July 2004; Volume 2, pp. 593–598. [Google Scholar]
- Madhavan, R.; Dissanayake, G.; Durrant-Whyte, H. Map-building and map-based localization in an underground-mine by statistical pattern matching. In Proceedings of the Fourteenth International Conference on Pattern Recognition (Cat. No.98EX170), Brisbane, QLD, Australia, 20–20 August 1998. [Google Scholar]
- Chi, H.P.; Zhan, K.; Shi, B.Q. Automatic guidance of underground mining vehicles using laser sensors. Tunn. Undergr. Space Technol. 2012, 27, 142–148. [Google Scholar] [CrossRef]
- Nuchter, A.; Surmann, H.; Lingemann, K.; Hertzberg, J.; Thrun, S. 6D SLAM with an application in autonomous mine mapping. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Dissanayake, M.G.; Newman, P.; Clark, S.; Durrant-Whyte, H.F.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Robot. Autom. 2001, 17, 229–241. [Google Scholar] [CrossRef] [Green Version]
- Bakambu, J.N.; Polotski, V. Autonomous system for navigation and surveying in underground mines. J. Field Robot. 2007, 24, 829–847. [Google Scholar] [CrossRef]
- Tabib, W.; Michael, N. Simultaneous localization and mapping of subterranean voids with gaussian mixture models. In Field and Service Robotics; Ishigami, G., Yoshida, K., Eds.; Springer: Singapore, 2021; Volume 16, pp. 173–187. [Google Scholar]
- Ren, Z.; Wang, L.; Bi, L. Robust GICP-Based 3D LiDAR SLAM for Underground Mining Environment. Sensors 2019, 19, 2915. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, H.; Choi, Y. Location estimation of autonomous driving robot and 3D tunnel mapping in underground mines using pattern matched LiDAR sequential images. Int. J. Min. Sci. Technol. 2021, 31, 779–788. [Google Scholar] [CrossRef]
- Duff, E.S.; Roberts, J.M.; Corke, P.I. Automation of an underground mining vehicle using reactive navigation and opportunistic localization. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003. [Google Scholar]
- Larsson, J. Unmanned Operation of Load-Haul-Dump Vehicles in Mining Environments. Ph.D. Thesis, Örebro University, Örebro, Sweden, December 2011. [Google Scholar]
- Larsson, J.; Appelgren, J.; Marshall, J. Next generation system for unmanned LHD operation in underground mines. In Proceedings of the Annual Meeting and Exhibition of the Society for Mining Metallurgy & Exploration (SME), Phoenix, AZ, USA, 28 February–3 March 2010. [Google Scholar]
- Larsson, J.; Broxvall, M.; Saffiotti, A. A navigation system for automated loaders in underground mines. In Field and Service Robotics; Corke, P., Sukkariah, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 25, pp. 129–140. [Google Scholar]
- Larsson, J.; Broxvall, M.; Saffiotti, A. Flexible infrastructure free navigation for vehicles in underground mines. In Proceedings of the 2008 4th International IEEE Conference Intelligent Systems, Varna, Bulgaria, 6–8 September 2008. [Google Scholar]
- Larsson, J.; Broxvall, M.; Saffiotti, A. Laser based intersection detection for reactive navigation in an underground mine. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008. [Google Scholar]
- Larsson, J.; Broxvall, M.; Saffiotti, A. Laser-based corridor detection for reactive navigation. IND Robot. 2008, 35, 69–79. [Google Scholar] [CrossRef] [Green Version]
- Larsson, J.; Broxvall, M.; Saffiotti, A. An evaluation of local autonomy applied to teleoperated vehicles in underground mines. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Kim, G.; Kim, A. Scan context: Egocentric spatial descriptor for place recognition within 3d point Cloud map. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- VLP-16 User Manual. Available online: https://usermanual.wiki/Pdf/VLP16Manual.1719942037/html (accessed on 12 December 2021).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene1 | Scene3 | |||||
|---|---|---|---|---|---|---|
| Mean/ms | Max/ms | Min/ms | Mean/ms | Max/ms | Min/ms | |
| Scan to Scan Matching | 20.4992 | 39.2756 | 11.7567 | 22.1333 | 38.4930 | 10.7109 |
| Scan to Map Matching | 16.8920 | 40.3859 | 10.6786 | 34.7994 | 64.0313 | 17.8489 |
| UKF Processing | 0.1086 | 0.2973 | 0.0664 | 0.1245 | 0.5322 | 0.0693 |
| DWML Average Time | 37.4998 | 57.0571 | ||||
| Localization Algorithm | Scene1 RMSE | Scene3 RMSE | ||
|---|---|---|---|---|
| Trans./m | Rot./rad | Trans./m | Rot./rad | |
| W/DWML | 0.0362 | 0.0292 | 0.2956 | 0.5243 |
| W/O DWML | 0.2467 | 1.3562 | 0.6676 | 0.2641 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Z.; Wang, L. Accurate Real-Time Localization Estimation in Underground Mine Environments Based on a Distance-Weight Map (DWM). Sensors 2022, 22, 1463. https://doi.org/10.3390/s22041463
Ren Z, Wang L. Accurate Real-Time Localization Estimation in Underground Mine Environments Based on a Distance-Weight Map (DWM). Sensors. 2022; 22(4):1463. https://doi.org/10.3390/s22041463
Chicago/Turabian StyleRen, Zhuli, and Liguan Wang. 2022. "Accurate Real-Time Localization Estimation in Underground Mine Environments Based on a Distance-Weight Map (DWM)" Sensors 22, no. 4: 1463. https://doi.org/10.3390/s22041463
APA StyleRen, Z., & Wang, L. (2022). Accurate Real-Time Localization Estimation in Underground Mine Environments Based on a Distance-Weight Map (DWM). Sensors, 22(4), 1463. https://doi.org/10.3390/s22041463