
Determination of Turning Radius and Lateral Acceleration of Vehicle by GNSS/INS Sensor



Abstract
:1. Introduction
1.1. State-of-the-Art
1.2. Literature Review
- Research focused on dynamics of passenger vehicles (including automobiles, vans, coach buses, etc.): Zhou et al. [6], Xu et al. [7], Hamersma and Els [8], Shu et al. [9], Jurecki and Stańczyk [11], Sazgar et al. [17], Visar et al. [12], Tian et al. [14], Ok et al. [18], Vu [46], Dižo et al. [55]—most of the mentioned research applied simulation methods, on the other hand, real conditions were included in Jurecki and Stańczyk [11], Xu et al. [13], Zamfir et al. [19].
- Research focused on dynamics of freight transport vehicles: Shojaei et al. [20], Wang and He [21], Braghin et al. [23], Lewington [24], Balson et al. [25], Zhang et al. [26], Qu et al. [27], Ikhsan et al. [28], Senalik and Medanic [29], Ibrahim and Singh [30], Winkler et al. [31], Romero et al. [32], Jiang et al. [33], Cao et al. [34], Tavassoli Kallebasti et al. [35], Huang et al. [36], Mischinger et al. [37], Marienka et al. [49]—most of the references listed before the hyphen applied simulation and numerical methods; however, results in field exploitation were presented, e.g., in Winkler et al. [31], Mischinger et al. [37], Skrúcaný et al. [48], Skrúcaný et al. [47], Vlkovský et al. [52], Vlkovský et al. [51].
- Research focused directly on drivers: Nash et al. [38], Plöchl and Edelmann [39], Allen et al. [40], Eboli et al. [41], Xu et al. [42], della Rossa et al. [43], Mikusova and Abnunazarov [56], Mikusova et al. [57], Kavinmathi et al. [44], Loman et al. [10], Rouillard et al. [54]—here it is worth underlining that research on drivers of freight transport vehicles was included solely in Allen et al. [40].
1.3. The State-of-the-Art for GNSS/INS
1.4. Research Gap and Contribution of the Paper
2. Materials and Methods
2.1. GNSS/INS Sensor Used to Measure Dynamic Actions
2.2. Forces to Design the Securing of Cargo
2.3. Evaluation of the Measured Data
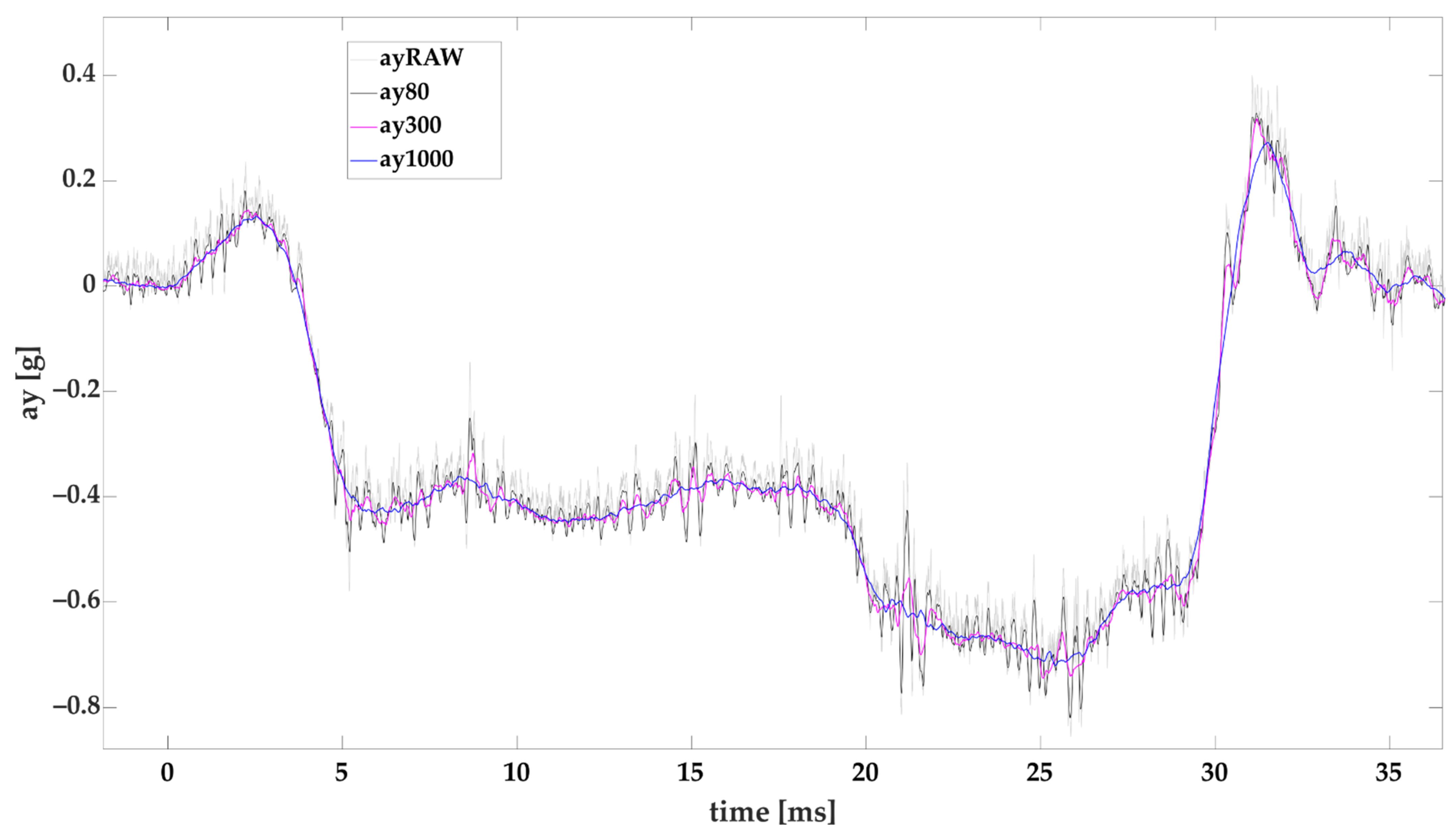
2.3.1. Evaluation of Measured Lateral Acceleration
2.3.2. Evaluation of Turning Radius R1
2.3.3. Evaluation of Turning Radius R2
2.3.4. Automatic Selection of Events Based on Stable Lateral Accelerations (SEL1)
2.3.5. Automatic Selection of Events Based on MSE of R1 and R2 (SEL2)
2.4. The Methodology of Performed Measurements
2.4.1. Test Vehicles
2.4.2. Test Routes
2.4.3. Statistical Investigation of Data
- is the number of events from all vehicles and test routes;
- is the coefficient of determination;
- is the root mean square error;
- is a slope parameter;
- is the y-intercept;
- is the 95th percentile of absolute value of residuals (errors).
3. Results
3.1. Turning Radius R1 vs. R2 of Events
3.2. Calculated Lateral Acceleration ayC vs. Measured Lateral Acceleration ayM of Events
3.3. Maximum Lateral Acceleration vs. Average Lateral Acceleration of Events
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- EN 12642:2016 Securing of Road on Road Vehicles—Body Structure of Commercial Vehicles—Minimum Requirements. Available online: https://standards.iteh.ai/catalog/standards/cen/cfb5d8a8-67c0-46fc-8b51-be9163596d6c/en-12642-2016 (accessed on 7 February 2022).
- EN 17321:2020 Intermodal Loading Units and Commercial Vehicles—Transport Stability of Packages—Minimum Require-ments and Tests. Available online: https://standards.iteh.ai/catalog/standards/sist/545c1b9f-c7d0-4196-aec8-eb1cbe8f0f81/ksist-fpren-17321-2020 (accessed on 7 February 2022).
- Alonso, M.; Mántaras, D.A.; Luque, P. Toward a methodology to assess safety of a vehicle. Saf. Sci. 2019, 119, 133–140. [Google Scholar] [CrossRef]
- Biral, F.; da Lio, M.; Bertolazzi, E. Combining safety margins and user preferences into a driving criterion for optimal control-based computation of reference maneuvers for an ADAS of the next generation. In Proceedings of the IEEE Intelligent Vehicles Symposium 2005, Las Vegas, NV, USA, 6–8 June 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 36–41. [Google Scholar] [CrossRef]
- Alonso, M.; Mántaras, D.A.; Luque, P. Methodology for determining real time safety margin in a road vehicle. Transp. Res. Procedia 2018, 33, 331–338. [Google Scholar] [CrossRef]
- Zhou, H.; Gao, J.; Liu, H. Vehicle speed preview control with road curvature information for safety and comfort promotion. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1527–1538. [Google Scholar] [CrossRef]
- Xu, J.; Yang, K.; Shao, Y.-M. Ride Comfort of Passenger Cars on Two-Lane Mountain Highways Based on Tri-axial Acceleration from Field Driving Tests. Int. J. Civ. Eng. 2018, 16, 335–351. [Google Scholar] [CrossRef]
- Hamersma, H.A.; Els, P.S. Longitudinal vehicle dynamics control for improved vehicle safety. J. Terramech. 2014, 54, 19–36. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Shu, H.B.; Shao, Y.-M. Effects of geometric features of highway horizontal alignment on steering behavior of passenger car. J. Vibroeng. 2016, 18, 4086–4104. [Google Scholar] [CrossRef]
- Loman, M.; Šarkan, B.; Skrúcaný, T. Comparison of fuel consumption of a passenger car depending on the driving style of the driver. Transp. Res. Procedia 2021, 55, 458–465. [Google Scholar] [CrossRef]
- Jurecki, R.; Stańczyk, T. A Methodology for Evaluating Driving Styles in Various Road Conditions. Energies 2021, 14, 3570. [Google Scholar] [CrossRef]
- Visar, B.; Odhisea, K.; Ilir, D. The Influence of the Lateral Acceleration on Vehicle Velocity Moving on Curved Road. Int. J. Civ. Eng. Technol. 2017, 8, 414–420. [Google Scholar]
- Xu, J.; Yang, K.; Shao, Y.; Lu, G. An Experimental Study on Lateral Acceleration of Cars in Different Environments in Sichuan, Southwest China. Discret. Dyn. Nat. Soc. 2015, 2015, 494130. [Google Scholar] [CrossRef] [Green Version]
- Tian, L.; Li, Y.; Li, J.; Lv, W. A simulation based large bus side slip and rollover threshold study in slope-curve section under adverse weathers. PLoS ONE 2021, 16, e0256354. [Google Scholar] [CrossRef]
- Wallentowitz, H. Automotive Engineering II. Lateral Vehicle Dynamics. Steering. Axle Design, 4th ed.; Institut für Kraftfahrwesen Aachen: Aachen, Germany, 2004. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer: Boston, MA, USA, 2012. [Google Scholar] [CrossRef]
- Sazgar, H.; Azadi, S.; Kazemi, R.; Khalaji, A.K. Integrated longitudinal and lateral guidance of vehicles in critical high speed manoeuvres. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 994–1013. [Google Scholar] [CrossRef]
- Ok, M.; Ok, S.; Park, J.H. Estimation of Vehicle Attitude, Acceleration and Angular Velocity Using Convolutional Neural Network and Dual Extended Kalman Filter. Sensors 2021, 21, 1282. [Google Scholar] [CrossRef]
- Zamfir, S.; Drosescu, R.; Gaiginschi, R. Practical method for estimating road curvatures using onboard GPS and IMU equipment. IOP Conf. Series: Mater. Sci. Eng. 2016, 147, 12114. [Google Scholar] [CrossRef] [Green Version]
- Shojaei, S.; Hanzaki, A.R.; Azadi, S.; Saeedi, M.A. A new automated motion planning system of heavy accelerating articulated vehicle in a real road traffic scenario. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 234, 161–184. [Google Scholar] [CrossRef]
- Wang, Q.; He, Y. A study on single lane-change manoeuvres for determining rearward amplification of multi-trailer articulated heavy vehicles with active trailer steering systems. Veh. Syst. Dyn. 2016, 54, 102–123. [Google Scholar] [CrossRef]
- Kamnik, R.; Boettiger, F.; Hunt, K. Roll dynamics and lateral load transfer estimation in articulated heavy freight vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2003, 217, 985–997. [Google Scholar] [CrossRef]
- Braghin, F.; Cheli, F.; Corradi, R.; Tomasini, G.; Sabbioni, E. Active anti-rollover system for heavy-duty road vehicles. Veh. Syst. Dyn. 2008, 46, 653–668. [Google Scholar] [CrossRef]
- Lewington, N.; Ohra-Aho, L.; Lange, O.; Rudnik, K. The Application of a One-Way Coupled Aerodynamic and Multi-Body Dynamics Simulation Process to Predict Vehicle Response during a Severe Crosswind Event; SAE Technical Paper 2017-01-1515; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Balsom, M.; Wilson, F.; Hildebrand, E. Impact of Wind Forces on Heavy Truck Stability. Transp. Res. Rec. J. Transp. Res. Board 2006, 1969, 115–120. [Google Scholar] [CrossRef]
- Zhang, Q.; Su, C.; Zhou, Y.; Zhang, C.; Ding, J.; Wang, Y. Numerical Investigation on Handling Stability of a Heavy Tractor Semi-Trailer under Crosswind. Appl. Sci. 2020, 10, 3672. [Google Scholar] [CrossRef]
- Qu, G.; He, Y.; Sun, X.; Tian, J. Modeling of Lateral Stability of Tractor-Semitrailer on Combined Alignments of Freeway. Discret. Dyn. Nat. Soc. 2018, 2018, 8438921. [Google Scholar] [CrossRef]
- Ikhsan, N.; Saifizul, A.; Ramli, R. The Effect of Vehicle and Road Conditions on Rollover of Commercial Heavy Vehicles during Cornering: A Simulation Approach. Sustainability 2021, 13, 6337. [Google Scholar] [CrossRef]
- Senalik, A.; Medanic, J. Feasibility of Modifying an Existing Semi-Trailer Air Suspension into an Anti-Rollover System; SAE Technical Paper 2001–01–2733; SAE International: Warrendale, PA, USA, 12 November 2001. [Google Scholar] [CrossRef]
- Ibrahim, R.A.; Singh, B. Assessment of ground vehicle tankers interacting with liquid sloshing dynamics. Int. J. Heavy Veh. Syst. 2018, 25, 23–112. [Google Scholar] [CrossRef]
- Winkler, C.; Sullivan, J.; Bogard, S.; Hagan, M.; Goodsell, R. Lateral-Acceleration Experience of Six Commercial Vehicles. Tire Sci. Technol. 2003, 31, 87–103. [Google Scholar] [CrossRef]
- Romero, J.A.; Betanzo-Quezada, E.; Lozano-Guzmán, A. A Methodology to Assess Road Tankers Rollover Trend during Turning. SAE Int. J. Commer. Veh. 2013, 6, 93–98. [Google Scholar] [CrossRef]
- Jiang, H.; Zhou, W.; Liu, C.; Zhang, G.; Hu, M. Safe and Ecological Speed Control for Heavy-Duty Vehicles on Long-Steep Downhill and Sharp-Curved Roads. Sustainability 2020, 12, 6813. [Google Scholar] [CrossRef]
- Cao, D.; Rakheja, S.; Su, C.-Y. Heavy vehicle pitch dynamics and suspension tuning. Part I: Unconnected suspension. Veh. Syst. Dyn. 2008, 46, 931–953. [Google Scholar] [CrossRef] [Green Version]
- Kallebasti, B.T.; Kordani, A.A.; Mavromatis, S.; Boroomandrad, S.M. Lateral friction demand on roads with coincident horizontal and vertical sag curves. Proc. Inst. Civ. Eng.-Transp. 2021, 174, 159–169. [Google Scholar] [CrossRef]
- Huang, C.-Z.; Cai, F.-T.; Long, J.; Wang, H.-G.; Fang, H. Multi-objective Optimization of Handling Stability of the Centre Axle Trailer Train. In Proceedings of the 2019 11th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Qiqihar, China, 28–29 April 2019; Volume 8858703, pp. 363–369. [Google Scholar] [CrossRef]
- Mischinger, M.; Rudigier, M.; Wimmer, P.; Kerschbaumer, A. Towards comfort-optimal trajectory planning and control. Veh. Syst. Dyn. 2018, 57, 1108–1125. [Google Scholar] [CrossRef]
- Nash, C.J.; Cole, D.J.; Bigler, R.S. A review of human sensory dynamics for application to models of driver steering and speed control. Biol. Cybern. 2016, 110, 91–116. [Google Scholar] [CrossRef] [Green Version]
- Plöchl, M.; Edelmann, J. Driver models in automobile dynamics application. Veh. Syst. Dyn. 2007, 45, 699–741. [Google Scholar] [CrossRef]
- Allen, R.W.; Chrstos, J.P.; Aponso, B.L.; Lee, D. Driver/Vehicle Modeling and Simulation; SAE Technical Paper 2002–01–1568; SAE International: Warrendale, PA, USA, 1 January 2002. [Google Scholar] [CrossRef]
- Eboli, L.; Mazzulla, G.; Pungillo, G. Combining speed and acceleration to define car users’ safe or unsafe driving behaviour. Transp. Res. Part C Emerg. Technol. 2016, 68, 113–125. [Google Scholar] [CrossRef]
- Xu, J.; Peng, Q.; Shao, Y.; Li, S. Analysis of operating quality of low class highlands highway with minimum standard design elements. Tongji Daxue Xuebao/J. Tongji Univ. 2010, 38, 245–251, 272. [Google Scholar] [CrossRef]
- Della Rossa, F.; Gobbi, M.; Mastinu, G.; Piccardi, C.; Previati, G. Stability of controlled road vehicles—A preliminary fundamental study. In Proceedings of the ASME Design Engineering Technical Conference 2015, Boston, MA, USA, 2–5 August 2015; Volume 3. [Google Scholar] [CrossRef]
- Kavinmathi, K.; Narayan, S.P.A.; Subramanian, S.C. Impact of lateral load transfer in heavy road vehicles at horizontal curves on the distress of asphalt pavements. Road Mater. Pavement Des. 2021, 1–21. [Google Scholar] [CrossRef]
- Skrúcaný, T.; Synák, F.; Semanová, S.; Ondruš, J.; Rievaj, V. Detection of road vehicle’s centre of gravity. In Proceedings of the 2018 XI International Science-Technical Conference Automotive Safety, Casta, Slovakia, 18–20 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Vu, T.M. Vehicle Steering Dynamic Calculation and Simulation. In Proceedings of the Annals of DAAAM for 2012 & the 23rd International DAAAM Symposium, Zadar, Croatia, 24–27 October 2012; Katalinic, B., Ed.; DAAAM International: Vienna, Austria, 2012; Volume 23, pp. 237–242. [Google Scholar]
- Skrucany, T.; Vrabel, J.; Kazimir, P. The influence of the cargo weight and its position on the braking characteristics of light commercial vehicles. Open Eng. 2020, 10, 154–165. [Google Scholar] [CrossRef]
- Skrúcaný, T.; Vrabel, J.; Kendra, M.; Kažimír, P. Impact of Cargo Distribution on the Vehicle Flatback on Braking Distance in Road Freight Transport. In Proceedings of the MATEC Web of Conferences 2017, Ceske Budejovice, Czech Republic, 19 October 2017; Volume 134, p. 54. [Google Scholar] [CrossRef]
- Marienka, P.; Frančák, M.; Jagelčák, J.; Synák, F. Comparison of Braking Characteristics of Solo Vehicle and Selected Types of Vehicle Combinations. Transp. Res. Procedia 2020, 44, 40–46. [Google Scholar] [CrossRef]
- Ondruš, J.; Kolla, E. Practical Use of the Braking Attributes Measurements Results. MATEC Web Conf. 2017, 134, 44. [Google Scholar] [CrossRef]
- Vlkovský, M.; Šmerek, M.; Michálek, J. Cargo securing during transport depending on the type of a road. IOP Conf. Ser. Mater. Sci. Eng. 2017, 245, 42001. [Google Scholar] [CrossRef]
- Vlkovský, M.; Neubauer, J.; Malíšek, J.; Michálek, J. Improvement of Road Safety through Appropriate Cargo Securing Using Outliers. Sustainability 2021, 13, 2688. [Google Scholar] [CrossRef]
- Vlkovský, M.; Ivanuša, T.; Neumann, V.; Foltin, P.; Vlachová, H. Optimizating cargo security during transport using dataloggers. J. Transp. Secur. 2017, 10, 63–71. [Google Scholar] [CrossRef]
- Rouillard, V.; Lamb, M.J.; Lepine, J.; Long, M.; Ainalis, D. The case for reviewing laboratory-based road transport simulations for packaging optimisation. Packag. Technol. Sci. 2021, 34, 339–351. [Google Scholar] [CrossRef]
- Dižo, J.; Blatnický, M.; Sága, M.; Harušinec, J.; Gerlici, J.; Legutko, S. Development of a New System for Attaching the Wheels of the Front Axle in the Cross-Country Vehicle. Symmetry 2020, 12, 1156. [Google Scholar] [CrossRef]
- Nurmuhumatovich, J.A.; Mikusova, M. Testing trajectory of road trains with program complexes. Arch. Automot. Eng. Arch. Motoryz 2019, 83, 103–112. [Google Scholar] [CrossRef]
- Mikusova, M.; Abdunazarov, J.; Zukowska, J.; Jagelcak, J. Designing of Parking Spaces on Parking Taking into Account the Parameters of Design Vehicles. Computation 2020, 8, 71. [Google Scholar] [CrossRef]
- Feng, X.; Zhang, T.; Lin, T.; Tang, H.; Niu, X. Implementation and Performance of a Deeply-Coupled GNSS Receiver with Low-Cost MEMS Inertial Sensors for Vehicle Urban Navigation. Sensors 2020, 20, 3397. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, F.; Gao, Y.; Zhao, L. Implementation and Analysis of Tightly Coupled Global Navigation Satellite System Precise Point Positioning/Inertial Navigation System (GNSS PPP/INS) with Insufficient Satellites for Land Vehicle Navigation. Sensors 2018, 18, 4305. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Specht, C.; Specht, M.; Brčić, D.; Jugović, A.; Widźgowski, S.; Wiśniewska, M.; Lewicka, O. Study on the Positioning Accuracy of GNSS/INS Systems Supported by DGPS and RTK Receivers for Hydrographic Surveys. Energies 2021, 14, 7413. [Google Scholar] [CrossRef]
- Chen, K.; Chang, G.; Chen, C. GINav: A MATLAB-based software for the data processing and analysis of a GNSS/INS integrated navigation system. GPS Solut. 2021, 25, 108. [Google Scholar] [CrossRef]
- Du, S.; Zhang, S.; Gan, X. A Hybrid Fusion Strategy for the Land Vehicle Navigation Using MEMS INS, Odometer and GNSS. IEEE Access 2020, 8, 152512–152522. [Google Scholar] [CrossRef]
- Zhang, Q.; Niu, X.; Zhang, H.; Shi, C. Algorithm Improvement of the Low-End GNSS/INS Systems for Land Vehicles Navigation. Math. Probl. Eng. 2013, 2013, 435286. [Google Scholar] [CrossRef]
- Ban, Y.; Niu, X.; Zhang, T.; Zhang, Q.; Liu, J. Modeling and Quantitative Analysis of GNSS/INS Deep Integration Tracking Loops in High Dynamics. Micromachines 2017, 8, 272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, X.; Luo, H.; Ning, B.; Zhao, F.; Bao, L.; Gong, Y.; Xiao, Y.; Jiang, J. RL-AKF: An Adaptive Kalman Filter Navigation Algorithm Based on Reinforcement Learning for Ground Vehicles. Remote Sens. 2020, 12, 1704. [Google Scholar] [CrossRef]
- Bedkowski, J.; Nowak, H.; Kubiak, B.; Studzinski, W.; Janeczek, M.; Karas, S.; Kopaczewski, A.; Makosiej, P.; Koszuk, J.; Pec, M.; et al. A Novel Approach to Global Positioning System Accuracy Assessment, Verified on LiDAR Alignment of One Million Kilometers at a Continent Scale, as a Foundation for Autonomous DRIVING Safety Analysis. Sensors 2021, 21, 5691. [Google Scholar] [CrossRef] [PubMed]
- Wilk, A.; Koc, W.; Specht, C.; Skibicki, J.; Judek, S.; Karwowski, K.; Chrostowski, P.; Szmagliński, J.; Dąbrowski, P.; Czaplew-ski, K.; et al. Innovative mobile method to determine railway track axis position in global coordinate system using position measurements performed with GNSS and fixed base of the measuring vehicle. Meas. J. Int. Meas. Confed. 2021, 175, 109016. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Dąbrowski, P.; Czaplewski, K.; Smolarek, L.; Lewicka, O. Road Tests of the Positioning Accuracy of INS/GNSS Systems Based on MEMS Technology for Navigating Railway Vehicles. Energies 2020, 13, 4463. [Google Scholar] [CrossRef]
- VectorNav VN-300 Dual GNSS/INS. Available online: https://www.vectornav.com/products/detail/vn-300?gclid=CjwKCAiAo4OQBhBBEiwA5KWu_yVidmWJjpLJJlk-Awqq51znQr8C27BFE-vTD7dypmOKj6i2dBEvDhoC-QYQAvD_BwE (accessed on 7 February 2022).
- EN 12195-1:2010 Load Restraining on Road Vehicles. Safety. Part 1: Calculation of Securing Forces. Available online: https://standards.iteh.ai/catalog/standards/cen/72067d57-b90c-4ca5-8bd0-f876e25e6a6e/en-12195-1-2010 (accessed on 7 February 2022).
- IMO/ILO/UNECE Code of Practice for Packing of Cargo Transport Units (CTU Code) 2014. Available online: https://unece.org/fileadmin/DAM/trans/doc/2014/wp24/CTU_Code_January_2014.pdf (accessed on 7 February 2022).
- VDI 2700 Blatt 16 Ladungssicherung auf Straßenfahrzeugen—Ladungssicherung bei Transportern bis 7,5 t zGM. Available online: https://www.vdi.de/richtlinien/details/vdi-2700-blatt-16-ladungssicherung-auf-strassenfahrzeugen-ladungssicherung-bei-transportern-bis-75-t-zgm (accessed on 7 February 2022).
- Directive 2014/47/EU of the European Parliament and of the Council of 3 April 2014 on the Technical Roadside Inspection of the Roadworthiness of Commercial Vehicles Circulating in the Union and Repealing Directive 2000/30/EC. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32014L0047&from=EN (accessed on 19 March 2021).
- Agreement Concerning the International Carriage of Dangerous Goods by Road, UN/ECE, Geneve. 2021. Available online: https://unece.org/transportdangerous-goods/adr-2021-files (accessed on 7 February 2022).
- Balkwill, J. Performance Vehicle Dynamics; Butterworth-Heinemann: Oxford, UK, 2018; ISBN 978-0-12-812693-6. [Google Scholar]
- Regulation (EU) 2018/858 of the European parliament and of the council of 30 May 2018 on the Approval and Market Sur-veillance of Motor Vehicles and Their Trailers, and of Systems, Components and Separate Technical Units Intended for Such Vehicles, Amending Regulations (EC) No 715/2007 and (EC) No 595/2009 and Repealing Directive 2007/46/EC. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:02018R0858-20210926 (accessed on 8 February 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| GNSS-Compass Heading (1 m) | 0.15–0.3° |
| Dynamic Heading | 0.2° |
| Dynamic Pitch/Roll | 0.03° |
| Gyro In-Run Bias (typical) | 5–7°/h |
| Accel In-Run Bias | <0.04 mg |
| Accelerometer Range | ±16 g |
| Gyroscope Range | ±2000°/s |
| IMU Data | 400 Hz |
| Navigation Data | 400 Hz |
| Parameter | Parameter Identification [Unit] | Sensor/Calculation |
|---|---|---|
| Vehicle velocity | [m·s−1] | output of GNSS/INS |
| Raw lateral acceleration of the sensor | [g] | output of accelerometer of IMU |
| Average lateral acceleration during 80 ms | [g] | calculated output of accelerometer of IMU |
| Average lateral acceleration during 300 ms | [g] | calculated output of accelerometer of IMU |
| Average lateral acceleration during 1000 ms | [g] | calculated output of accelerometer of IMU |
| Turning radius from vehicle speed and lateral acceleration | [m] | calculation based on outputs of velocity from GNSS/INS and of accelerometer of IMU |
| Turning radius from GPS coordinates | [m] | calculation based on GPS coordinates from GNSS/INS |
| Calculated lateral acceleration of event | [g] | calculation |
| Measured average lateral acceleration of event from | [g] | accelerometer of IMU |
| Measured maximum lateral acceleration of event from ay1000 | [g] | accelerometer of IMU |
| ID | Vehicle Name | Vehicle Category According to [76] | Manufacturing Year | Vehicle Mass [kg] | Wheel Base [mm] | Longitudinal Distance of Sensor from Front Axle [mm] | Ratio of Position of the Sensor and Wheel Base [mm] | Vertical Distance of Sensor from Road Surface [mm] |
|---|---|---|---|---|---|---|---|---|
| V1 | VW Polo | M1 | 2006 | 1138 | 2441 | 1692 | 0.69 | 1480 |
| V2 | VW Polo | M1 | 2004 | 1033 | 2465 | 1721 | 0.70 | 1500 |
| V3 | Opel Antara | M1 | 2014 | 1941 | 2710 | 1815 | 0.67 | 1705 |
| V4 | Škoda Fabia | M1 | 2014 | 1116 | 2460 | 1780 | 0.72 | 1550 |
| V5 | Renault Master | N1 | 2019 | 3350 | 4325 | 3020 | 0.70 | 2320 |
| V6 | Renault Master | N1 | 2019 | 2350 | 4325 | 3020 | 0.70 | 2320 |
| V7 | Renault Master | N1 | 2014 | 3330 | 4360 | 2920 | 0.67 | 2355 |
| V8 | Renault Master | N1 | 2014 | 2330 | 4360 | 2920 | 0.67 | 2355 |
| V9 | VW Touareg | M1G | 2003 | 2420 | 2865 | 1870 | 0.65 | 1713 |
| V10 | VW Touareg; trailer | M1G; O1 | 2003; 2005 | 2850 | 2865; 2818 | 1870 | 0.65 | 1713 |
| Test Route | Measurement | V1 | V2 | V3 | V4 | V5 | V6 | V7 | V8 | V9 | V10 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 16,864 | 17,251 | 16,908 | 17,331 | 16,999 | 16,687 | 16,944 | 16,924 | 16,697 | 17,031 |
| 1 | 2 | 16,582 | 16,948 | 16,905 | 16,925 | 16,959 | 16,939 | 16,935 | 16,923 | 17,030 | 17,037 |
| 1 | 3 | 16,966 | 16,964 | 16,926 | 16,932 | 16,976 | 16,967 | 16,945 | 16,933 | 17,054 | 17,035 |
| 1 | 4 | 16,966 | 16,962 | 17,375 | 17,354 | 17,265 | 17,252 | 16,949 | 16,936 | 17,024 | 17,029 |
| 1 | 5 | 17,445 | |||||||||
| 1 | 6 | 17,426 | |||||||||
| 2 | 1 | 4139 | 5048 | 4394 | 4509 | 4588 | 4588 | 4681 | |||
| 1&2 | Total distance | 67,380 | 68,127 | 107,127 | 73,594 | 68,204 | 72,244 | 72,289 | 72,313 | 72,402 | 72,823 |
| Vehicle ay | Minimum Value [g] | Speed [km/h] | Maximum Value [g] | Speed [km/h] | Vehicle ay | Minimum Value [g] | Speed [km/h] | Maximum Value [g] | Speed [km/h] |
|---|---|---|---|---|---|---|---|---|---|
| V1 | V6 | ||||||||
| ay80 | −0.855 | 32.1 | 0.724 | 43.4 | ay80 | −0.864 | 29.2 | 1.363 | 32.3 |
| ay300 | −0.700 | 27.9 | 0.685 | 45.0 | ay300 | −0.731 | 31.1 | 0.740 | 31.7 |
| ay1000 | −0.653 | 28.1 | 0.660 | 45.1 | ay1000 | −0.697 | 31.5 | 0.399 | 50.2 |
| V2 | V7 | ||||||||
| ay80 | −0.822 | 25.2 | 0.749 | 42.7 | ay80 | −0.682 | 23.3 | 0.670 | 30.0 |
| ay300 | −0.612 | 25.7 | 0.641 | 42.4 | ay300 | −0.606 | 24.7 | 0.493 | 39.7 |
| ay1000 | −0.596 | 25.5 | 0.563 | 42.7 | ay1000 | −0.526 | 24.3 | 0.473 | 39.7 |
| V3 | V8 | ||||||||
| ay80 | −0.857 | 24.6 | 0.820 | 35.2 | ay80 | −0.813 | 28.4 | 0.784 | 32.8 |
| ay300 | −0.655 | 49.1 | 0.532 | 47.5 | ay300 | −0.693 | 31.5 | 0.565 | 34.3 |
| ay1000 | −0.610 | 26.5 | 0.477 | 41.6 | ay1000 | −0.668 | 31.5 | 0.474 | 43.4 |
| V4 | V9 | ||||||||
| ay80 | −1.086 | 31.0 | 0.863 | 35.9 | ay80 | −0.829 | 27.2 | 0.545 | 30.7 |
| ay300 | −0.896 | 31.4 | 0.756 | 50.6 | ay300 | −0.775 | 27.9 | 0.433 | 41.2 |
| ay1000 | −0.798 | 30.9 | 0.720 | 51.1 | ay1000 | −0.746 | 27.9 | 0.401 | 41.2 |
| V5 | V10 | ||||||||
| ay80 | −0.913 | 29.3 | 1.061 | 26.1 | ay80 | −0.603 | 23.5 | 0.493 | 28.1 |
| ay300 | −0.706 | 28.7 | 0.651 | 26.5 | ay300 | −0.531 | 23.8 | 0.398 | 19.8 |
| ay1000 | −0.644 | 29.8 | 0.409 | 48.5 | ay1000 | −0.515 | 23.7 | 0.340 | 19.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jagelčák, J.; Gnap, J.; Kuba, O.; Frnda, J.; Kostrzewski, M. Determination of Turning Radius and Lateral Acceleration of Vehicle by GNSS/INS Sensor. Sensors 2022, 22, 2298. https://doi.org/10.3390/s22062298
Jagelčák J, Gnap J, Kuba O, Frnda J, Kostrzewski M. Determination of Turning Radius and Lateral Acceleration of Vehicle by GNSS/INS Sensor. Sensors. 2022; 22(6):2298. https://doi.org/10.3390/s22062298
Chicago/Turabian StyleJagelčák, Juraj, Jozef Gnap, Ondrej Kuba, Jaroslav Frnda, and Mariusz Kostrzewski. 2022. "Determination of Turning Radius and Lateral Acceleration of Vehicle by GNSS/INS Sensor" Sensors 22, no. 6: 2298. https://doi.org/10.3390/s22062298
APA StyleJagelčák, J., Gnap, J., Kuba, O., Frnda, J., & Kostrzewski, M. (2022). Determination of Turning Radius and Lateral Acceleration of Vehicle by GNSS/INS Sensor. Sensors, 22(6), 2298. https://doi.org/10.3390/s22062298