
An Indirect Method for Determining the Local Heat Transfer Coefficient of Gas Flows in Pipelines

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensor Calibration
3. Measuring System Speed
4. Application of the Indirect Method
5. Conclusions
- An indirect method for determining the local heat transfer coefficient of gas flows in pipelines based on a hot-wire anemometer and a thread sensor is proposed. The approach’s applicability is based on the Kutateladze–Leontiev method (the laws of friction and heat transfer) and the effect of the hydrodynamic analogy of heat transfer (the Reynolds analogy).
- The use of an indirect method, the design of a thread sensor for determining local friction stress on a surface, a method for calibrating the sensor, the main electrical parameters for connecting the sensor to the measuring system and the basic parameters of a measuring system are described.
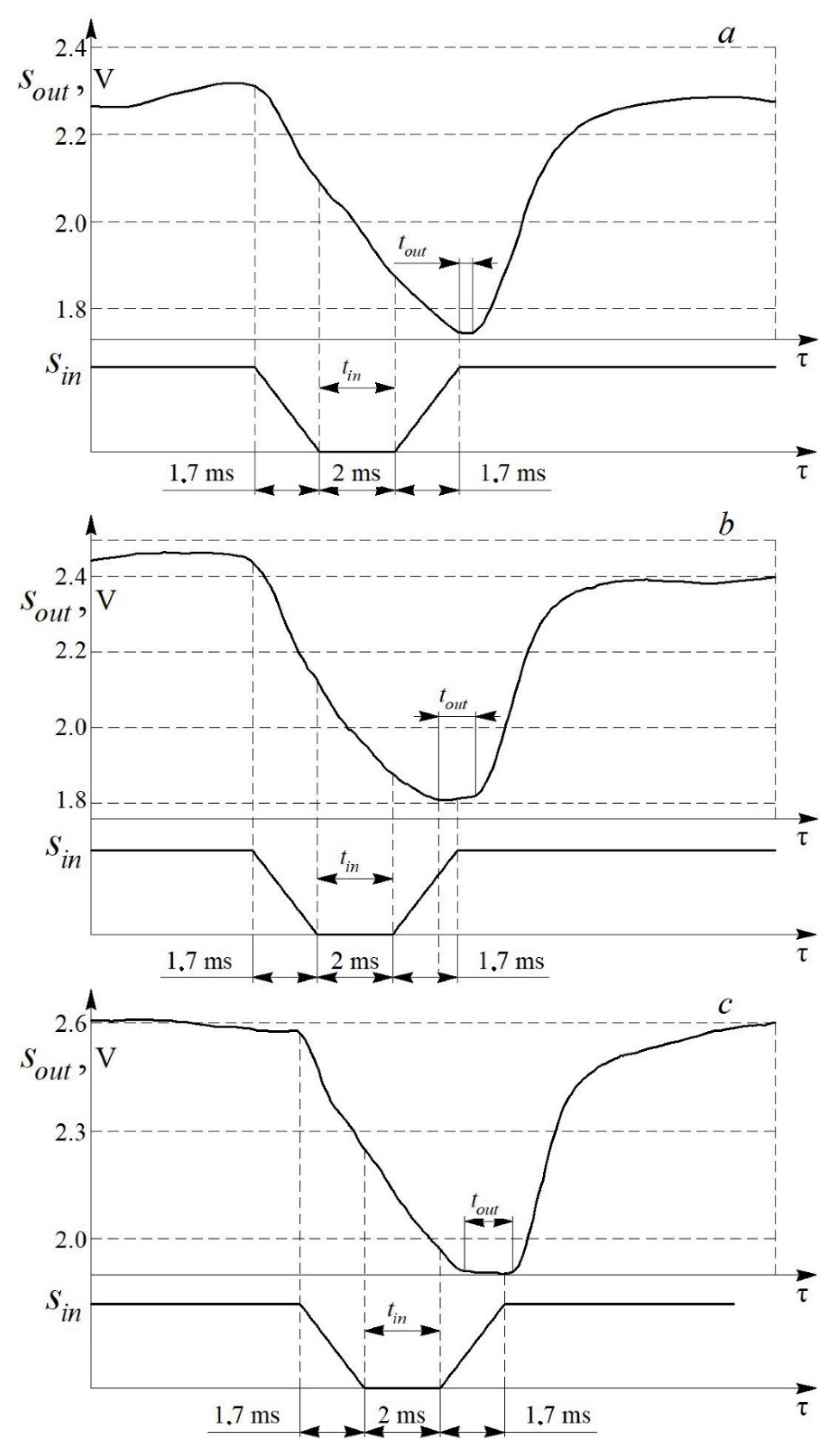
- It was found that the time constant of the measuring system is from 1.3 to 3.5 ms, depending on the gas flow velocity. Accordingly, the proposed method for determining the local heat transfer coefficient is applicable to the study of unsteady heat-mechanical processes in various applications.
- The limitations of the proposed method for determining local heat transfer coefficients are discussed, and an example of using this method when building piston engines is given.
- In the future, this research could be furthered by discussing improvements to the proposed method in terms of increasing its accuracy, expanding its applicability, and enhancing its speed and stability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| MV | millivoltmeter |
| H-WA | hot-wire anemometer |
| ADC | analog-to-digital converter |
| PC | personal computer |
| SCS | speed control system |
| CFD | Computational Fluid Dynamics |
| Re | Reynolds number |
| Nu | Nusselt number |
| Pr | Prandtl number |
| RS | sensor resistance, Ohms |
| R, R1, R2 | bridge electrical resistances, Ohms |
| wx | local air velocity, m/s |
| w | average air flow velocity, m/s |
| αx | local heat transfer coefficient, W/(m2·K) |
| po | barometric pressure, kPa |
| T | temperature, °C |
| d | pipeline diameter, mm |
| l | linear dimension, mm |
| n | crankshaft rotation frequency, rpm |
| U | electrical voltage, V |
| qc | heat flux density, W/m2 |
| τc | friction stress on the surface, N |
| λ | thermal conductivity coefficient of the gas, W/(m·K) |
| μ | dynamic viscosity coefficient of the gas, Pa·s |
| Tf − Tc | the temperature difference between the gas and the wall |
| νx | kinematic viscosity, m2/s |
| εl | correction factor for the channel length |
| τp | time of one pulsation, s |
| τf | front time, s |
| τdec | decay time, s |
| τss | steady-state time, s |
| Δτ | time of significant pulsation, s |
| φ | nozzle overlap angle, deg. |
| f | blade rotation frequency, 1/s |
| Sin | input signal, V |
| Sout | output signal, V |
| Kw | waveform conformance factor |
| KU | voltage amplifiers |
| KI | current amplifiers |
| tin | input signal trough width, s |
| tout | output signal trough width, s |
| τΣ | duration of the transient process, s |
| τo | time constant, s |
| τ | time, s |
References
- Gortyshov, Y.F.; Dresvyannikov, F.N.; Idiatullin, N.S.; Kalmykov, I.I.; Kovalnogov, N.N.; Letyagin, V.G.; Tonkonog, V.G.; Filin, V.A.; Khalatov, A.A.; Shchukin, V.K.; et al. Theory and Technique of Thermophysical Experiment; Energoatomizdat: Moscow, Russia, 1985; 360p. [Google Scholar]
- Incropera, F.P.; DeWitt, D.P. Fundamentals of Heat and Mass Transfer; Wiley: New York, NY, USA, 1996; 1070p. [Google Scholar]
- Yan, Y.-C.; Jiang, C.-Y.; Chen, R.-B.; Ma, B.-H.; Deng, J.-J.; Zheng, S.-J.; Luo, J. Highly sensitive flow sensor based on flexible dual-layer heating structures. Sensors 2020, 20, 6657. [Google Scholar] [CrossRef] [PubMed]
- Etrati, A.; Bhiladvala, R.B. Frequency response analysis of guard-heated hot-film wall shear stress sensors for turbulent flows. Int. J. Heat Fluid Flow 2014, 46, 61–69. [Google Scholar] [CrossRef]
- Etrati, A.; Assadian, E.; Bhiladvala, R.B. Analyzing guard-heating to enable accurate hot-film wall shear stress measurements for turbulent flows. Int. J. Heat Mass Transf. 2014, 70, 835–843. [Google Scholar] [CrossRef]
- Liu, X.; Li, Z.; Gao, N. An improved wall shear stress measurement technique using sandwiched hot-film sensors. Theor. Appl. Mech. Lett. 2018, 8, 137–141. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, T.; Zhu, X.; Yang, K.; Ge, Q.; Wang, M.; Yang, Q. Inverse estimation of hot-wall heat flux using nonlinear artificial neural networks. Measurement 2021, 181, 109648. [Google Scholar] [CrossRef]
- Elkins, B.S.; Keyhani, M.; Frankel, J.I. Surface heat flux prediction through physics-based calibration, Part 2: Experimental validation. J. Thermophys. Heat Transf. 2013, 27, 206–216. [Google Scholar] [CrossRef]
- Hurley, P.; Duarte, J.P. Implementation of fiber optic temperature sensors in quenching heat transfer analysis. Appl. Therm. Eng. 2021, 195, 117257. [Google Scholar] [CrossRef]
- Wang, Y.; Li, X.; Liu, D.; Liu, Y. Analysis of Two Calculation Methods of Heat Flux Based on Slug Calorimeter. IEEE Sens. J. 2021, 21, 1287–1293. [Google Scholar] [CrossRef]
- Alanazi, M.A.; Diller, T.E. Noninvasive method to measure thermal energy flow rate in a pipe. J. Therm. Sci. Eng. Appl. 2021, 13, 031024. [Google Scholar] [CrossRef]
- Liu, Y.; Mitsutake, Y.; Monde, M. Development of fast response heat transfer measurement technique with thin-film thermocouples. Int. J. Heat Mass Transf. 2020, 162, 120331. [Google Scholar] [CrossRef]
- Terekhov, V.I.; Yarygina, N.I.; Zhdanov, R.F. Influence of External Turbulence on Heat Transfer in a Separated Flow Behind a Single Rib or a Step. Heat Transf. Res. 1998, 29, 513–517. [Google Scholar]
- Malyukov, A.V.; Mikheev, N.I.; Molochnikov, V.M. New technique for laboratory measurements of heat transfer coefficient. Instrum. Exp. Tech. 2016, 59, 159–161. [Google Scholar] [CrossRef]
- Hubble, D.O.; Diller, T.E. A hybrid method for measuring heat flux. J. Heat Transf. 2010, 132, 031602. [Google Scholar] [CrossRef]
- Lundstrom, H. Investigation of heat transfer from thin wires in air and a new method for temperature correction of hot-wire anemometers. Exp. Therm. Fluid Sci. 2021, 1281, 110403. [Google Scholar] [CrossRef]
- Hultmark, M.; Smits, A.J. Temperature corrections for constant temperature and constant current hot-wire anemometers. Meas. Sci. Technol. 2010, 21, 105404. [Google Scholar] [CrossRef]
- Manshadi, M.D.; Esfeh, M.K. A new approach about heat transfer of hot-wire anemometer. Appl. Mech. Mater. 2012, 232, 747–751. [Google Scholar] [CrossRef]
- Ardekani, M.A.; Farhani, F. Experimental study on response of hot wire and cylindrical hot film anemometers operating under varying fluid temperatures. Flow Meas. Instrum. 2009, 20, 174–179. [Google Scholar] [CrossRef]
- Pullins, C.A.; Diller, T.E. Direct measurement of hot-wall heat flux. J. Thermophys. Heat Transf. 2012, 26, 430–438. [Google Scholar] [CrossRef]
- Myrick, J.A.; Keyhani, M.; Frankel, J.I. Calibration of a plug-type gauge for measurement of surface heat flux and temperature using data from in-depth thermocouples. Exp. Therm. Fluid Sci. 2019, 104, 302–316. [Google Scholar] [CrossRef]
- Nenarokomov, A.V.; Alifanov, O.M.; Budnik, S.A.; Netelev, A.V. Research and development of heat flux sensor for ablative thermal protection of spacecrafts. Int. J. Heat Mass Transf. 2016, 97, 990–1000. [Google Scholar] [CrossRef]
- Dejima, K.; Nakabeppu, O. Attempt of estimating flow characteristics from wall heat fluxes measured using a three-point micro-electro-mechanical systems sensor. Int. J. Engine Res. 2021, 22, 1974–1984. [Google Scholar] [CrossRef]
- Moussou, J.; Pilla, G.; Sotton, J.; Bellenoue, M.; Rabeau, F. High-frequency wall heat flux measurement during wall impingement of a diffusion flame. Int. J. Engine Res. 2021, 22, 847–855. [Google Scholar] [CrossRef]
- Liu, X.; Li, Z.; Wu, C.; Gao, N. Toward calibration-free wall shear stress measurement using a dual hot-film sensor and Kelvin bridges. Meas. Sci. Technol. 2018, 29, 105303. [Google Scholar] [CrossRef]
- Al-Kouz, W.; Aissa, A.; Koulali, A.; Jamshed, W.; Moria, H.; Nisar, K.S.; Mourad, A.; Abdel-Aty, A.-H.; Khashan, M.M.; Yahia, I.S. MHD darcy-forchheimer nanofluid flow and entropy optimization in an odd-shaped enclosure filled with a (MWCNT-Fe3O4/water) using galerkin finite element analysis. Sci. Rep. 2021, 11, 22635. [Google Scholar] [CrossRef]
- Jamshed, W.; Eid, M.R.; Hussain, S.M.; Abderrahmane, A.; Safdar, R.; Younis, O.; Pasha, A.A. Physical specifications of MHD mixed convective of Ostwald-de Waele nanofluids in a vented-cavity with inner elliptic cylinder. Int. Commun. Heat Mass Transf. 2022, 134, 106038. [Google Scholar] [CrossRef]
- Koulali, A.; Abderrahmane, A.; Jamshed, W.; Hussain, S.M.; Nisar, K.S.; Abdel-Aty, A.-H.; Yahia, I.S.; Eid, M.R. Comparative Study on Effects of Thermal Gradient Direction on Heat Exchange between a Pure Fluid and a Nanofluid: Employing Finite Volume Method. Coatings 2021, 11, 1481. [Google Scholar] [CrossRef]
- Abderrahmane, A.; Qasem, N.A.A.; Younis, O.; Marzouki, R.; Mourad, A.; Shah, N.A.; Chung, J.D. MHD Hybrid Nanofluid Mixed Convection Heat Transfer and Entropy Generation in a 3-D Triangular Porous Cavity with Zigzag Wall and Rotating Cylinder. Mathematics 2022, 10, 769. [Google Scholar] [CrossRef]
- Rasool, G.; Saeed, A.M.; Lare, A.I.; Abderrahmane, A.; Guedri, K.; Vaidya, H.; Marzouki, R. Darcy-Forchheimer Flow of Water Conveying Multi-Walled Carbon Nanoparticles through a Vertical Cleveland Z-Staggered Cavity Subject to Entropy Generation. Micromachines 2022, 13, 744. [Google Scholar] [CrossRef]
- Orlu, R.; Vinuesa, R. Thermal anemometry. In Experimental Aerodynamics; CRC Press: Boca Raton, FL, USA, 2017; pp. 257–304. [Google Scholar]
- Lundstrom, H. Note: Improving long-term stability of hot-wire anemometer sensors by means of annealing. Rev. Sci. Instrum. 2015, 86, 086104. [Google Scholar] [CrossRef]
- Mukhachev, G.A.; Shchukin, V.K. Thermodynamics and Heat Transfer; Higher School: Moscow, Russia, 1991; 480p. [Google Scholar]
- Kreith, F.; Black, W. Basics of Heat Transfer; Mir: Moscow, Russia, 1983; 512p. [Google Scholar]
- Tsvetkov, F.F.; Grigoriev, B.A. Heat and Mass Transfer; MPEI Publishing House: Moscow, Russia, 2011; 562p. [Google Scholar]
- Kutateladze, S.S.; Leontiev, A.I. Heat and Mass Transfer and Friction in a Turbulent Boundary Layer; Energoatomizdat: Moscow, Russia, 1985; 320p. [Google Scholar]
- Flagiello, D.; Parisi, A.; Lancia, A.; Di Natale, F. A Review on Gas-Liquid Mass Transfer Coefficients in Packed-Bed Columns. ChemEngineering 2021, 5, 43. [Google Scholar] [CrossRef]
- Stepanenko, I.P. Fundamentals of the Theory of Transistors and Transistor Circuits; Energy: Moscow, Russia, 1967; 616p. [Google Scholar]
- Mallick, M.; Tian, X.; Zhu, Y.; Morelande, M. Angle-Only Filtering of a Maneuvering Target in 3D. Sensors 2022, 22, 1422. [Google Scholar] [CrossRef]
- Travis, J.; Wells, L.K. Labview for Everyone; Prentice Hall: Portland, Oregon, 2001; 589p. [Google Scholar]
- Sindler, Y.; Lineykin, S. Static, Dynamic, and Signal-to-Noise Analysis of a Solid-State Magnetoelectric (Me) Sensor with a Spice-Based Circuit Simulator. Sensors 2022, 22, 5514. [Google Scholar] [CrossRef]
- Plotnikov, L.V. Unsteady gas dynamics and local heat transfer of pulsating flows in profiled channels mainly to the intake system of a reciprocating engine. Int. J. Heat Mass Transf. 2022, 195, 123144. [Google Scholar] [CrossRef]
- Davletshin, I.A.; Mikheev, N.I.; Paereliy, A.A.; Gazizov, I.M. Convective heat transfer in the channel entrance with a square leading edge under forced flow pulsations. Int. J. Heat Mass Transf. 2019, 129, 74–85. [Google Scholar] [CrossRef]
- Emery, A.F.; Neighbors, P.K.; Gessner, F.B. The numerical prediction of developing turbulent flow and heat transfer in a square Duct. J. Heat Transf. 1980, 102, 51–57. [Google Scholar] [CrossRef]
- Rohsenow, W.M.; Hartnett, J.P. Handbook of Heat Transfer; McGraw-Hill: New York, NY, USA, 1973; 1501p. [Google Scholar]
- Terekhov, V.I. Heat Transfer in Highly Turbulent Separated Flows: A Review. Energies 2021, 14, 1005. [Google Scholar] [CrossRef]
- Plotnikov, L.V.; Zhilkin, B.P. Influence of gas-dynamical nonstationarity on local heat transfer in the gas–air passages of piston internal-combustion engines. J. Eng. Phys. Thermophys. 2018, 91, 1444–1451. [Google Scholar] [CrossRef]
- Plotnikov, L.V. Experimental research into the methods for controlling the thermal-mechanical characteristics of pulsating gas flows in the intake system of a turbocharged engine model. Int. J. Engine Res. 2022, 23, 334–344. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plotnikov, L.; Plotnikov, I.; Osipov, L.; Slednev, V.; Shurupov, V. An Indirect Method for Determining the Local Heat Transfer Coefficient of Gas Flows in Pipelines. Sensors 2022, 22, 6395. https://doi.org/10.3390/s22176395
Plotnikov L, Plotnikov I, Osipov L, Slednev V, Shurupov V. An Indirect Method for Determining the Local Heat Transfer Coefficient of Gas Flows in Pipelines. Sensors. 2022; 22(17):6395. https://doi.org/10.3390/s22176395
Chicago/Turabian StylePlotnikov, Leonid, Iurii Plotnikov, Leonid Osipov, Vladimir Slednev, and Vladislav Shurupov. 2022. "An Indirect Method for Determining the Local Heat Transfer Coefficient of Gas Flows in Pipelines" Sensors 22, no. 17: 6395. https://doi.org/10.3390/s22176395
APA StylePlotnikov, L., Plotnikov, I., Osipov, L., Slednev, V., & Shurupov, V. (2022). An Indirect Method for Determining the Local Heat Transfer Coefficient of Gas Flows in Pipelines. Sensors, 22(17), 6395. https://doi.org/10.3390/s22176395