
Indoor Positioning of Low-Cost Narrowband IoT Nodes: Evaluation of a TDoA Approach in a Retail Environment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Contribution
- Can commonly used fully-asynchronous narrowband IoT radio transceiver chips be used for ToF-based localization?
- What positioning accuracy can be achieved in real-world scenarios without using any prior information such as scenario geometry or reference nodes at known positions?
- What receiver configurations are beneficial in this regard?
- Given the known limitations of ToF-based techniques at a fixed bandwidth, what are the possible benefits of data fusion with other techniques, namely AoA and RSS?
- Proof of concept for the suggested wideband localization scheme on narrowband transceiver chips.
- Demonstration in an operating store under real-world conditions with a focus on the physical layer.
- Analysis of possible anchor placements and requirements of a receiver infrastructure.
- Evaluation of a data fusion approach for node-to-infrastructure wideband TDoA and AoA with narrowband node-to-node RSS measurements.
1.2. Related Work
1.3. Paper Outline
2. Localization Scheme
2.1. Nodes
2.2. Infrastructure
3. Test Measurements
3.1. Measurement Scenario
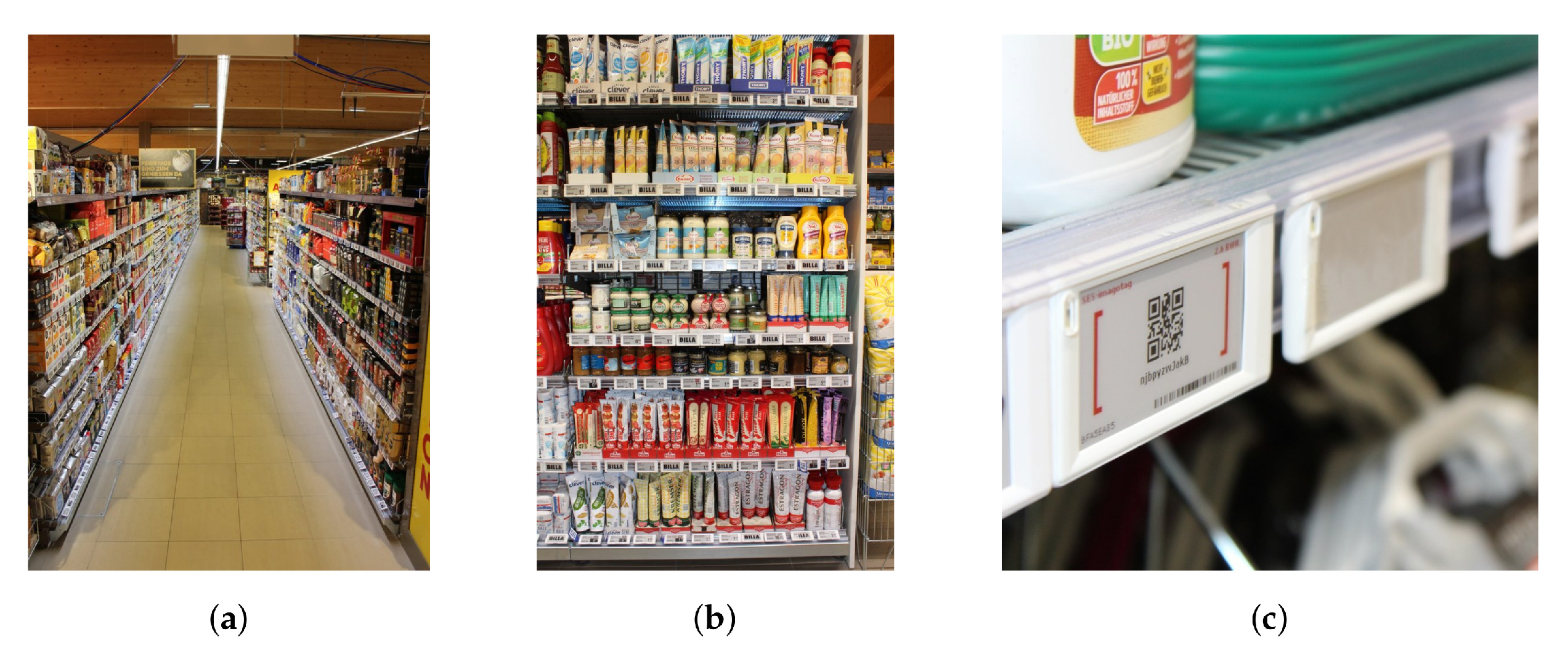
3.1.1. Environment
3.1.2. Anchor Placement
 ), representing their omni-directional characteristics and as diamonds for dual-antenna anchors (
), representing their omni-directional characteristics and as diamonds for dual-antenna anchors (  ), indicating the array boresight with best AoA resolution by pointing in aisle direction (symmetrically). In accordance with the used positioning error bound framework [21], the anchors are labeled . This framework was used to evaluate the PEB for the entire scenario, shown in Figure 2b. To do so, certain channel parameters have to be assumed, such as propagation loss, power delay profile (PDP), receiver noise figure, additional attenuation for non-LoS links, etc. These parameters were chosen from the literature [9,15,18], to resemble the considered scenario. Naturally, this best guess approach is suboptimal and deviations of the measurements from these theoretical results must be anticipated. Nonetheless, this approach gives a basic idea of possible consequences of certain anchor placements and was used extensively to analyze possible schemes for the given scenario prior to the measurement campaign. As the position estimator used in this work itself does not rely on these coarsely assumed channel parameters, no negative impact of inaccurately chosen parameters must be anticipated.
), indicating the array boresight with best AoA resolution by pointing in aisle direction (symmetrically). In accordance with the used positioning error bound framework [21], the anchors are labeled . This framework was used to evaluate the PEB for the entire scenario, shown in Figure 2b. To do so, certain channel parameters have to be assumed, such as propagation loss, power delay profile (PDP), receiver noise figure, additional attenuation for non-LoS links, etc. These parameters were chosen from the literature [9,15,18], to resemble the considered scenario. Naturally, this best guess approach is suboptimal and deviations of the measurements from these theoretical results must be anticipated. Nonetheless, this approach gives a basic idea of possible consequences of certain anchor placements and was used extensively to analyze possible schemes for the given scenario prior to the measurement campaign. As the position estimator used in this work itself does not rely on these coarsely assumed channel parameters, no negative impact of inaccurately chosen parameters must be anticipated.3.2. Measurement Setup
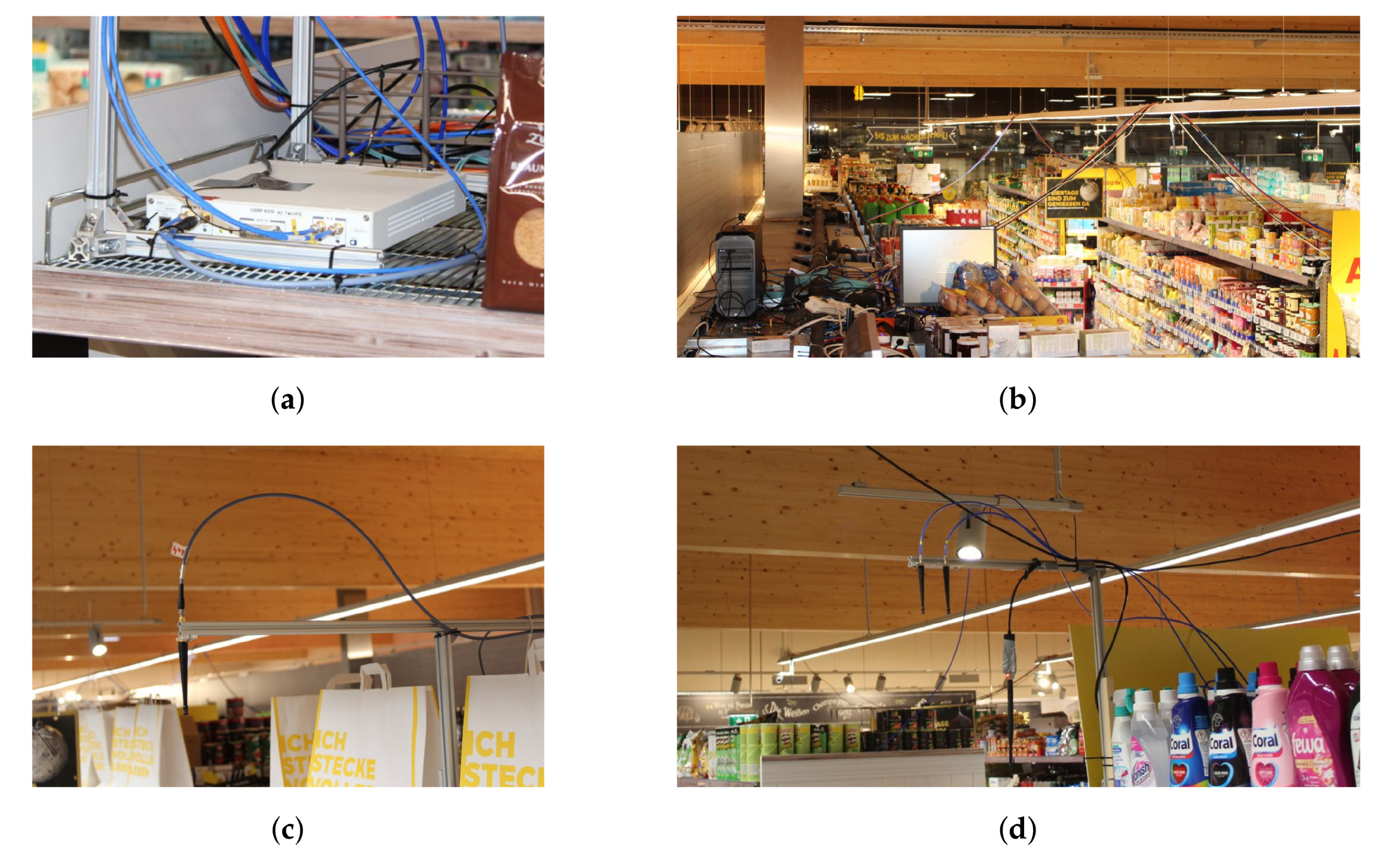
3.2.1. Receiver Hardware
 ). With four physical receiver channels each, these receivers provide a total of twelve physical channels. The sampling rate allows to cover the full ISM band at G. Further technical details on these receivers can be found in the product documentation (https://kb.ettus.com/X300/X310, https://kb.ettus.com/TwinRX; both accessed on 1 February 2022).
). With four physical receiver channels each, these receivers provide a total of twelve physical channels. The sampling rate allows to cover the full ISM band at G. Further technical details on these receivers can be found in the product documentation (https://kb.ettus.com/X300/X310, https://kb.ettus.com/TwinRX; both accessed on 1 February 2022). ) were used for node configuration using a standard communication protocol. All cables and the dongles were fixed to the suspended lighting installation of the store.
) were used for node configuration using a standard communication protocol. All cables and the dongles were fixed to the suspended lighting installation of the store.3.2.2. Anchor Configuration
3.2.3. Synchronization and Calibration
4. Measurement Evaluation
4.1. Overview
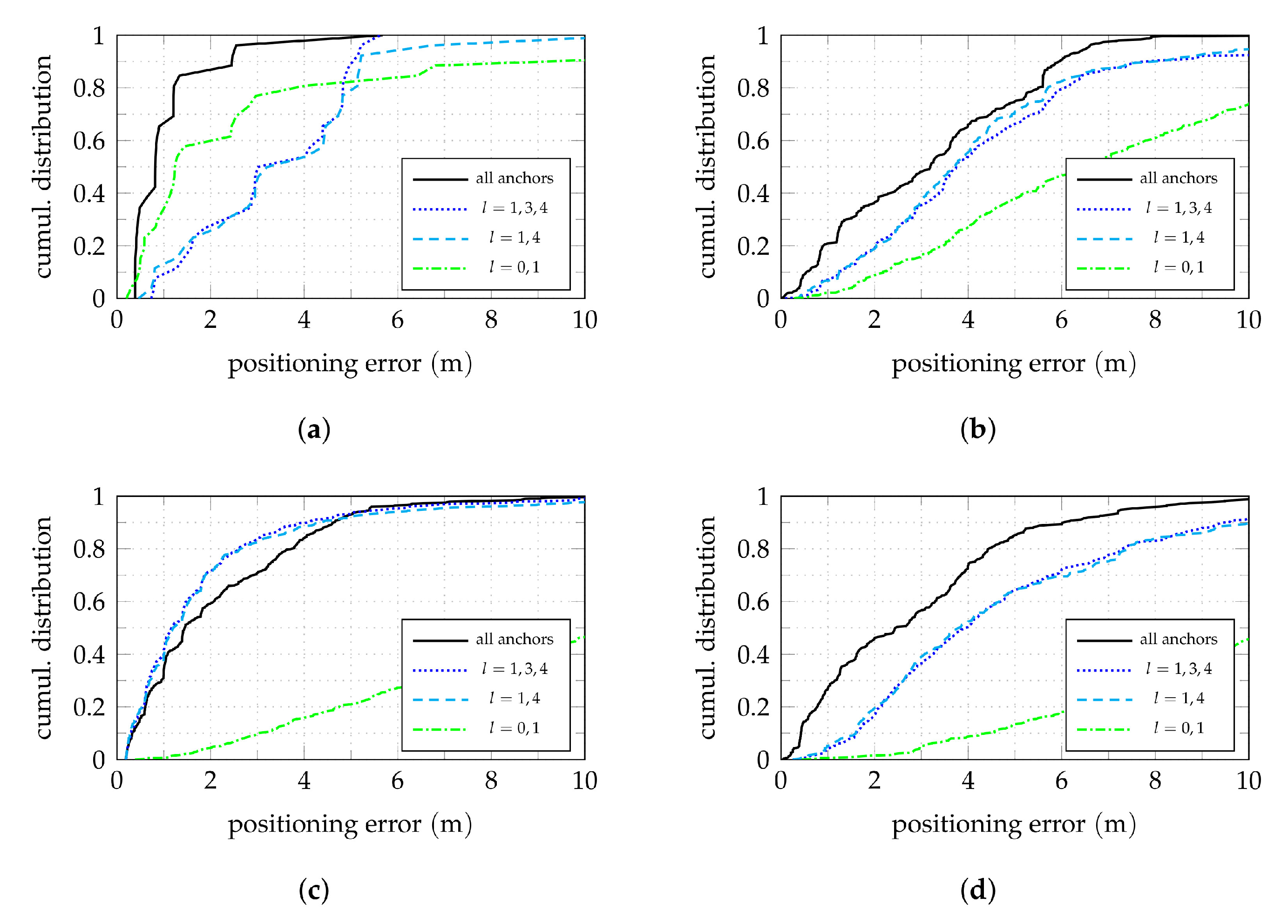
4.2. Anchor Placement Analysis
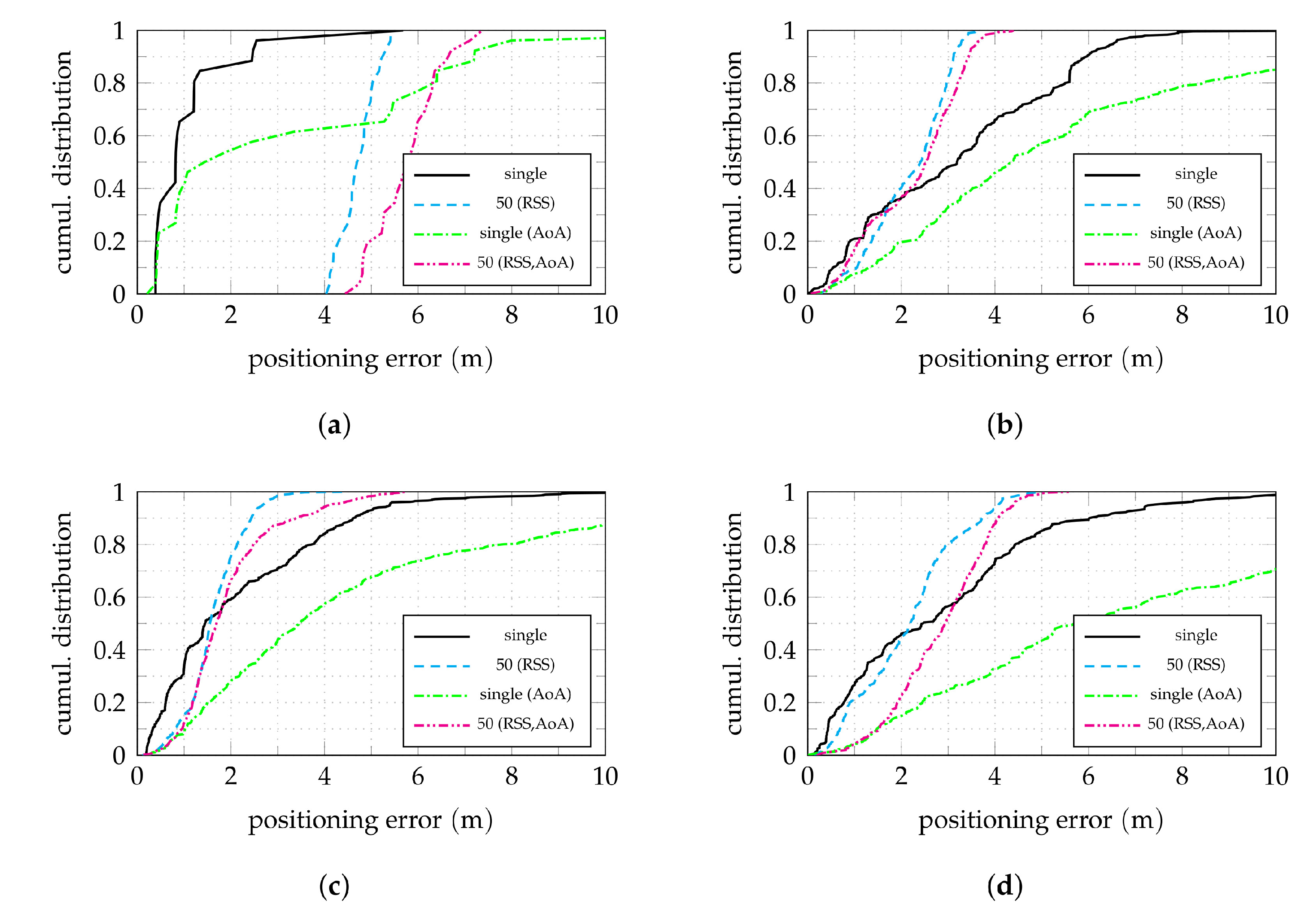
4.3. Clustering
5. Conclusions
6. Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AoA | Angle of Arrival |
| CRLB | Cramér-Rao Lower Bound |
| CW | Continuous Wave |
| DMC | Dense Multipath Components |
| ESL | Electronic Shelf Label |
| FPGA | Field-Programmable Gate Array |
| IoT | Internet of Things |
| LoS | Line-of-Sight |
| MLE | Maximum Likelihood Estimation |
| PEB | Position Error Bound |
| PPS | Pulse-Per-Second |
| RMSE | Root-Mean-Square Error |
| RSS | Received Signal Strength |
| SDR | Software-Defined Radio |
| TDoA | Time Difference of Arrival |
| ToF | Time of Flight |
| UHD | USRP Hardware Driver |
| USRP | Universal Software Radio Peripheral |
References
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Deng, Z.D.; Rauchenstein, L.T.; Carlson, T.J. Contributed Review: Source-localization algorithms and applications using time of arrival and time difference of arrival measurements. Rev. Sci. Instr. 2016, 87, 041502. [Google Scholar] [CrossRef] [PubMed]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Zafari, F.; Papapanagiotou, I.; Hacker, T.J. A Novel Bayesian Filtering Based Algorithm for RSSI-Based Indoor Localization. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018. [Google Scholar] [CrossRef]
- Wielandner, L.; Leitinger, E.; Witrisal, K. RSS-Based Cooperative Localization and Orientation Estimation Exploiting Antenna Directivity. IEEE Access 2021, 9, 53046–53060. [Google Scholar] [CrossRef]
- Al-Sarawi, S.; Anbar, M.; Alieyan, K.; Alzubaidi, M. Internet of Things (IoT) communication protocols: Review. In Proceedings of the 2017 8th International Conference on Information Technology (ICIT), Amman, Jordan, 17–18 May 2017; pp. 685–690. [Google Scholar] [CrossRef]
- Karray, F.; Jmal, M.W.; Garcia-Ortiz, A.; Abid, M.; Obeid, A.M. A comprehensive survey on wireless sensor node hardware platforms. Comput. Netw. 2018, 144, 89–110. [Google Scholar] [CrossRef]
- Hinteregger, S.; Leitinger, E.; Meissner, P.; Kulmer, J.; Witrisal, K. Bandwidth dependence of the ranging error variance in dense multipath. In Proceedings of the 2016 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 29 August–2 September 2016; pp. 733–737. [Google Scholar] [CrossRef]
- Li, Z.; Braun, T.; Zhao, X.; Zhao, Z.; Hu, F.; Liang, H. A Narrow-Band Indoor Positioning System by Fusing Time and Received Signal Strength via Ensemble Learning. IEEE Access 2018, 6, 9936–9950. [Google Scholar] [CrossRef]
- Witrisal, K.; Meissner, P.; Leitinger, E.; Shen, Y.; Gustafson, C.; Tufvesson, F.; Haneda, K.; Dardari, D.; Molisch, A.F.; Conti, A.; et al. High-Accuracy Localization for Assisted Living: 5G systems will turn multipath channels from foe to friend. IEEE Signal Process. Mag. 2016, 33, 59–70. [Google Scholar] [CrossRef]
- Neunteufel, D.; Grebien, S.; Hechenberger, S.; Witrisal, K.; Arthaber, H. Coherent Chirp Generation by Narrowband Transceiver Chips for ToF Indoor Localization. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Neunteufel, D.; Fuchs, A.; Arthaber, H. ToF-based Indoor Positioning for Low-power IoT Nodes. In Proceedings of the 2020 54th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 1–4 November 2020; pp. 641–645. [Google Scholar] [CrossRef]
- Karedal, J.; Wyne, S.; Almers, P.; Tufvesson, F.; Molisch, A.F. A Measurement-Based Statistical Model for Industrial Ultra-Wideband Channels. IEEE Trans. Wirel. Commun. 2007, 6, 3028–3037. [Google Scholar] [CrossRef] [Green Version]
- Molisch, A.F.; Balakrishnan, K.; Chong, C.C.; Emami, S.; Fort, A.; Karedal, J.; Kunisch, J.; Schantz, H.; Schuster, U.; Siwiak, K. IEEE 802.15. 4a channel model-final report. IEEE P802 2004, 15, 0662. [Google Scholar]
- Shen, Y.; Win, M.Z. Fundamental Limits of Wideband Localization Part I: A General Framework. IEEE Trans. Inf. Theory 2010, 56, 4956–4980. [Google Scholar] [CrossRef]
- Xu, J.; Ma, M.; Law, C.L. Position Estimation Using UWB TDOA Measurements. In Proceedings of the 2006 IEEE International Conference on Ultra-Wideband, Waltham, MA, USA, 24–27 September 2006; pp. 605–610. [Google Scholar] [CrossRef]
- Wilding, T.; Grebien, S.; Mühlmann, U.; Witrisal, K. Accuracy Bounds for Array-Based Positioning in Dense Multipath Channels. Sensors 2018, 18, 4249. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Witrisal, K.; Leitinger, E.; Hinteregger, S.; Meissner, P. Bandwidth Scaling and Diversity Gain for Ranging and Positioning in Dense Multipath Channels. IEEE Wirel. Commun. Lett. 2016, 5, 396–399. [Google Scholar] [CrossRef]
- Leitinger, E.; Meissner, P.; Rüdisser, C.; Dumphart, G.; Witrisal, K. Evaluation of Position-Related Information in Multipath Components for Indoor Positioning. IEEE J. Sel. Areas Commun. 2015, 33, 2313–2328. [Google Scholar] [CrossRef] [Green Version]
- Neunteufel, D.; Grebien, S.; Arthaber, H. Bayesian CRLB for Blind Indoor Localization with Imperfect Receiver Synchronization. In Proceedings of the 2021 55th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 31 October–3 November 2021; pp. 517–522. [Google Scholar] [CrossRef]
- Trees, H.L.V.; Bell, K.L. Bayesian Bounds for Parameter Estimation and Nonlinear Filtering/Tracking; Wiley-IEEE Press: New York, NY, USA, 2007. [Google Scholar]
- Kim, J.; Kang, J.; Kim, D.; Ko, Y.; Kim, J. IEEE 802.15.4a CSS-based Localization System for Wireless Sensor Networks. In Proceedings of the 2007 IEEE International Conference on Mobile Adhoc and Sensor Systems, Pacific Grove, CA, USA, 8–11 October 2007; pp. 1–3. [Google Scholar] [CrossRef]
- Ricciato, F.; Sciancalepore, S.; Gringoli, F.; Facchi, N.; Boggia, G. Position and Velocity Estimation of a Non-Cooperative Source From Asynchronous Packet Arrival Time Measurements. IEEE Trans. Mob. Comput. 2018, 17, 2166–2179. [Google Scholar] [CrossRef]
- Tiemann, J.; Schweikowski, F.; Wietfeld, C. Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Meissner, P.; Steiner, C.; Witrisal, K. UWB positioning with virtual anchors and floor plan information. In Proceedings of the 2010 7th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 150–156. [Google Scholar] [CrossRef]
- Ridolfi, M.; de Velde, S.V.; Steendam, H.; Poorter, E.D. Analysis of the Scalability of UWB Indoor Localization Solutions for High User Densities. Sensors 2018, 18, 1875. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nikitin, P.V.; Martinez, R.; Ramamurthy, S.; Leland, H.; Spiess, G.; Rao, K.V.S. Phase based spatial identification of UHF RFID tags. In Proceedings of the IEEE International Conference on RFID (IEEE RFID 2010), Orlando, FL, USA, 14–16 April 2010; pp. 102–109. [Google Scholar] [CrossRef]
- Hekimian-Williams, C.; Grant, B.; Liu, X.; Zhang, Z.; Kumar, P. Accurate localization of RFID tags using phase difference. In Proceedings of the 2010 IEEE International Conference on RFID (IEEE RFID 2010), Orlando, FL, USA, 14–16 April 2010; pp. 89–96. [Google Scholar] [CrossRef] [Green Version]
- Best, R.E. Phase Locked Loops: Design, Simulation, and Applications, 6th ed.; McGraw-Hill: New York, NY, USA, 2007. [Google Scholar]
- Jankiraman, M. FMCW Radar Design; Artech House: Norwood, MA, USA, 2018. [Google Scholar]
- Haberleitner, D. Extension of the RFNoC Framework for Signal Acquisition and Generation with a Focus on Slow Network Connections. Master’s Thesis, University of Applied Sciences Upper Austria, Hagenberg, Austria, 2020. [Google Scholar]
- Hansen, R.C. Phased Array Antennas; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall, Inc.: Hoboken, NJ, USA, 1993. [Google Scholar]
- Hyun, J.; Oh, T.; Lim, H.; Myung, H. UWB-based Indoor Localization Using Ray-tracing Algorithm. In Proceedings of the 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 24–27 June 2019. [Google Scholar] [CrossRef]
- Wang, Q.; Balasingham, I.; Zhang, M.; Huang, X. Improving RSS-Based Ranging in LOS-NLOS Scenario Using GMMs. IEEE Commun. Lett. 2011, 15, 1065–1067. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neunteufel, D.; Grebien, S.; Arthaber, H. Indoor Positioning of Low-Cost Narrowband IoT Nodes: Evaluation of a TDoA Approach in a Retail Environment. Sensors 2022, 22, 2663. https://doi.org/10.3390/s22072663
Neunteufel D, Grebien S, Arthaber H. Indoor Positioning of Low-Cost Narrowband IoT Nodes: Evaluation of a TDoA Approach in a Retail Environment. Sensors. 2022; 22(7):2663. https://doi.org/10.3390/s22072663
Chicago/Turabian StyleNeunteufel, Daniel, Stefan Grebien, and Holger Arthaber. 2022. "Indoor Positioning of Low-Cost Narrowband IoT Nodes: Evaluation of a TDoA Approach in a Retail Environment" Sensors 22, no. 7: 2663. https://doi.org/10.3390/s22072663
APA StyleNeunteufel, D., Grebien, S., & Arthaber, H. (2022). Indoor Positioning of Low-Cost Narrowband IoT Nodes: Evaluation of a TDoA Approach in a Retail Environment. Sensors, 22(7), 2663. https://doi.org/10.3390/s22072663