
Deep Learning Approach to UAV Detection and Classification by Using Compressively Sensed RF Signal


Abstract
:1. Introduction
- According to the characteristics of the UAV communication RF signal, the compressed sensing technology is introduced, and its effectiveness is verified through experiments.
- A deep learning UAV detection and classification network based on radio frequency compressed signals is constructed by using deep learning algorithms;
- Filtering and feature extraction are performed on the compressed measurement signal, which improves the classification effect of UAV types and modes.
2. Related Work
2.1. Data Acquisition
2.2. Detection and Classification Methods
2.2.1. Traditional Method Based
2.2.2. Deep Learning Based
3. Proposed Sampling and Detection Method
3.1. Detection and Classification Methods
3.1.1. Compressive Sensing
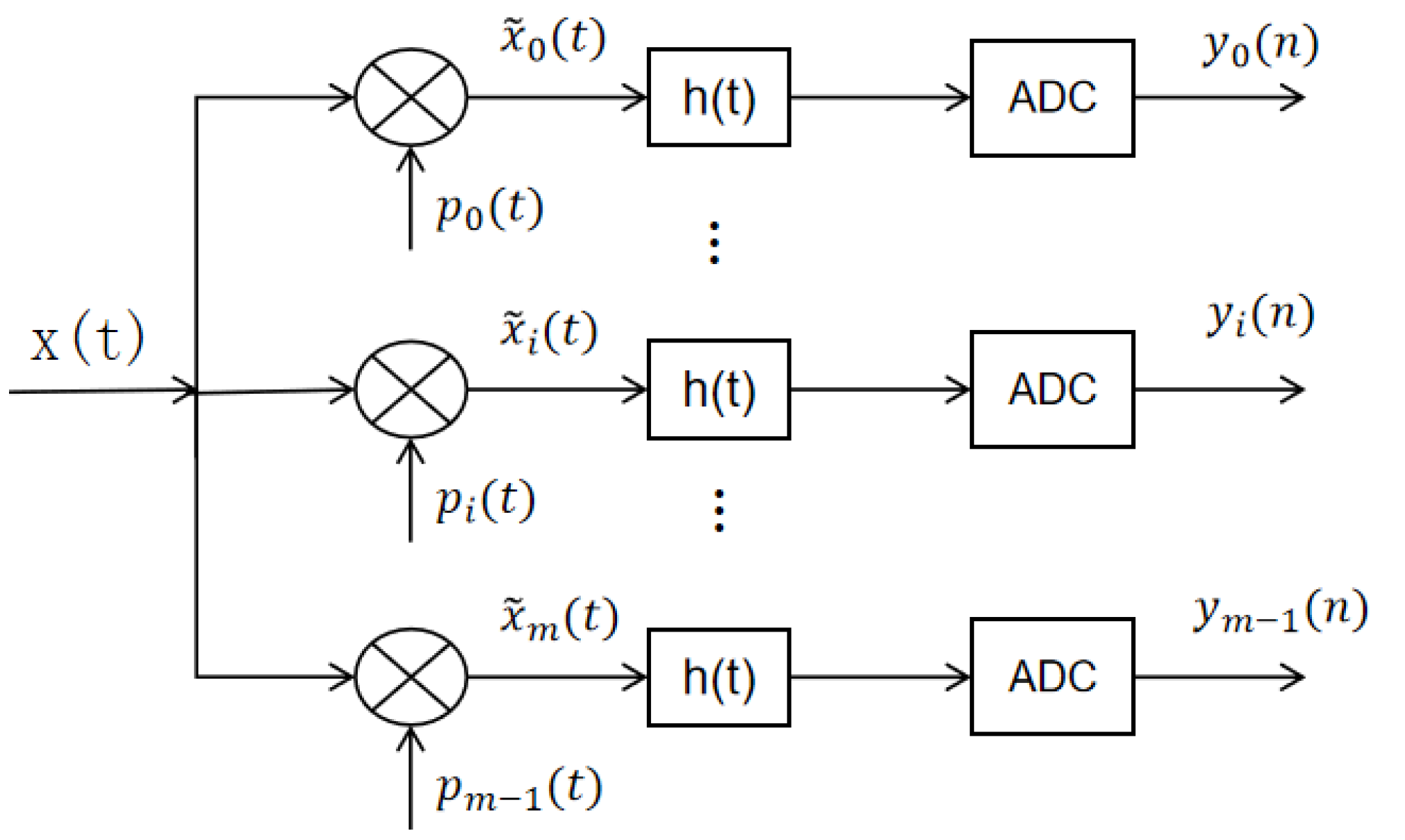
- x(t) is multiplied with the mixed signal time domain, and the spectrum of x(t) is frequency shifted to the lower frequency band; that, is the spectrum of x(t) is moved to the [−f/m, f/m] region, thus the mixed signal is:where is obtained with equal probability taking and W is the Nyquist rate.
- After the ideal low pass filter h(t) with a cut off frequency of ,the mixed output signal will be filtered out of the high frequency signal and only the signal whose spectrum is shifted to the low frequency band (the narrow band signal with frequency in [/2, /2]) will be retained, so the filtered signal is the signal of the i-th band in the original x(t).
- Finally, the m group of low-speed sampling sequence is obtained by sampling interval for the low-speed ADC sampling (ADC sampling satisfies the Nyquist theorem), when:
3.1.2. Data Pre-Processing
- Zero-centered the compressed measurement signal , to remove mainly the zero-frequency component and the offset component.
- Computing the power spectral density .where N is the length of , and .
- The conversion signals of each channel are connected to create the complete spectrum. As the connection between each conversion signal obtained after MCRD sampling is the same. Therefore, only the connection of two adjacent channels is given here.where c is a normalization factor calculated as the ratio between the last Q samples of the previous power spectrum and the first Q samples of the next power spectrum , and N is the total number of in . c ensures that continuity of the spectrum is maintained between the two halves of the RF spectrum, as they are captured using different devices; however, the spectral bias is inevitable. Note that Q must be relatively small to successfully stitch the two spectra and large enough to average out any random fluctuations, e.g., Q = 10 for M = 2048.
- Finally, only the connected power spectral density P needs to perform maximum normalization to vary all the values to within the interval from 0 to 1, which constitutes one piece of data for the input detection classification network.
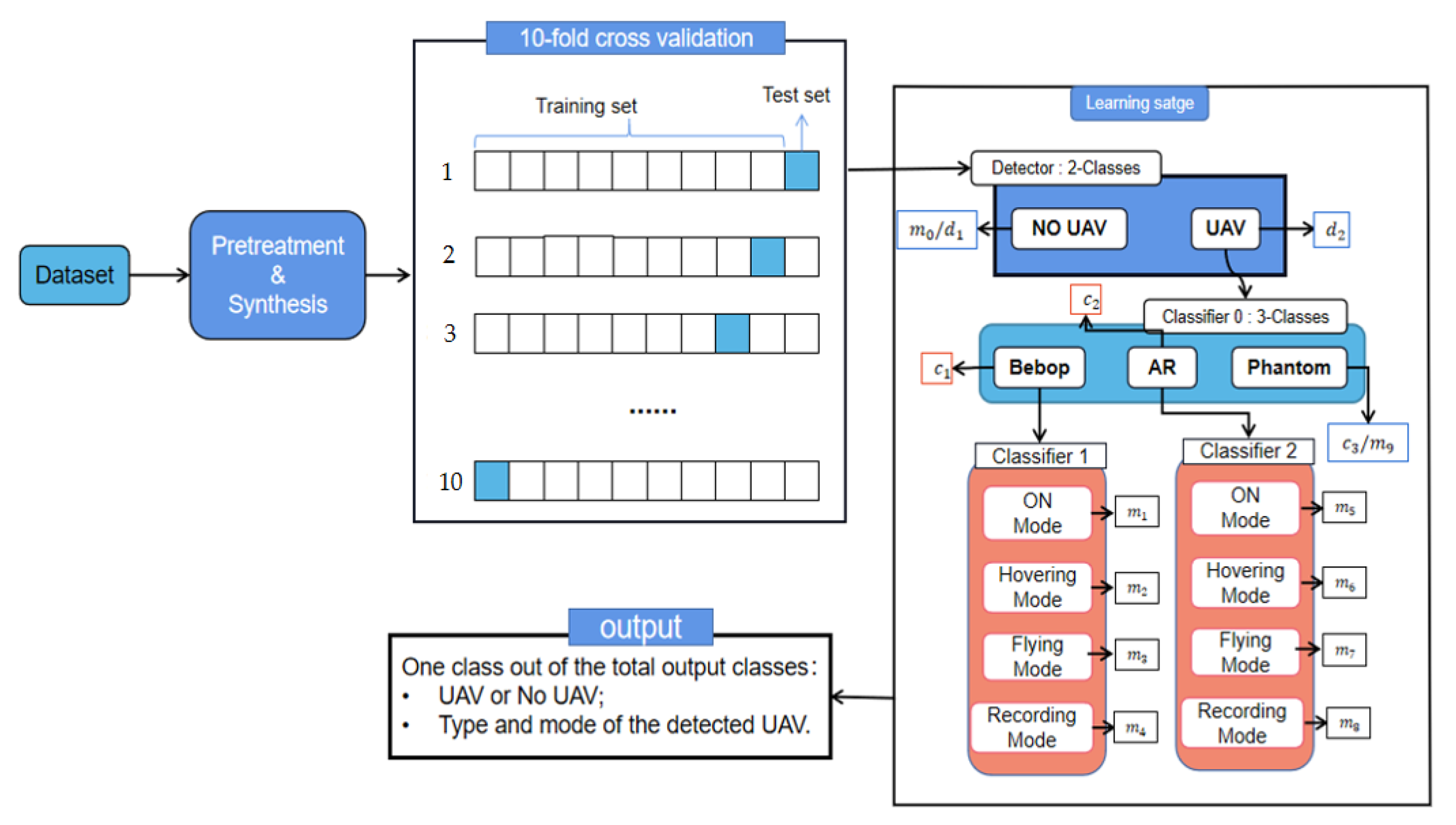
3.2. Two/Multistage Classification Network
- UAV Detection Network (DNN Network): mainly used in the no-fly area to detect the existence of UAVs; in other words, two types, with and without the presence of UAVs. Since these two signals are still relatively easy to distinguish in the spectrum, we constructed a DNN network consisting of five Dense layers, with the specific parameters shown in Table 1.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Embedded Structure | Parameter | Activation |
|---|---|---|---|
| 1 | Input | (None, 2047) | - |
| 2 | Dense Dense Dense Dense | 256 128 256 128 | ReLU ReLU ReLU ReLU |
| 3 | Output Layer | 2 | sigmoid |
- 2.
- UAV Identification and Classification Network (CNN Network): mainly used to identify and classify the type and flying modes of UAVs. Firstly, after detecting an intruding UAV, the type of UAV (N class) is identified based on the RF signal, where N is the number of UAV type contained in the UAV dataset; secondly, after determining the type of UAV, then the motion mode under that type is further determined (4 Classes: on, connected and off; hovering; flying; and flying with video recording). For both cases, we use convolutional layers for feature extraction, pooling layers to reduce the information size, and finally fully connected layers for classification. A CNN network structure is designed, consisting of six 1D convolutional layers, each followed by a pooling layer, ending with two fully connected layers for further classification, interspersed with two Dropout layers to prevent overfitting, with the parameters shown in Table 2.
| Layer | Embedded Structure | Parameter | Activation |
|---|---|---|---|
| 1 | Input Layer | (None, 2047, 1) | - |
| 2 | Conv1D Max pooling | filters = 32, kernel size=6 | ReLU |
| 3, 4, 5 | Conv1D Average pooling | filters = 64, kernel size = 3 | ReLU |
| 6, 7 | Conv1D Average pooling | filters = 128, kernel size = 3 | ReLU |
| 8 | Dropout Flatten | 0.25 | - |
| 9 | Dense Dropout Dense | 256 0.22 128 | ReLU |
| 10 | Output Layer | Type of Output | softmax |
4. Experiments and Results
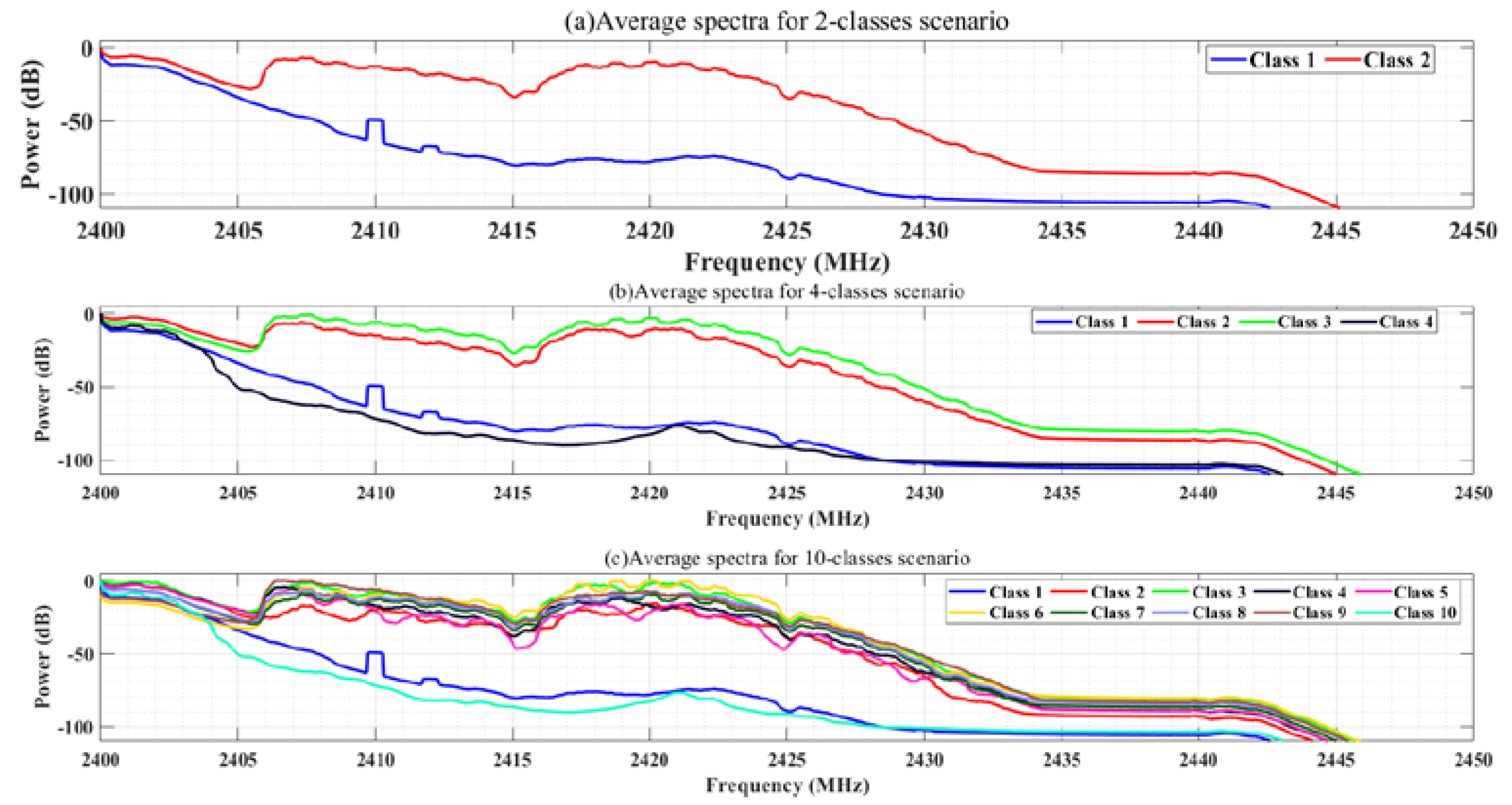
4.1. Dataset
4.1.1. Raw Dataset
4.1.2. Simulation Dataset
4.1.3. Dataset Reliability Analysis
4.2. Counterpart Two/Multilevel Classification
4.3. Detection and Classification
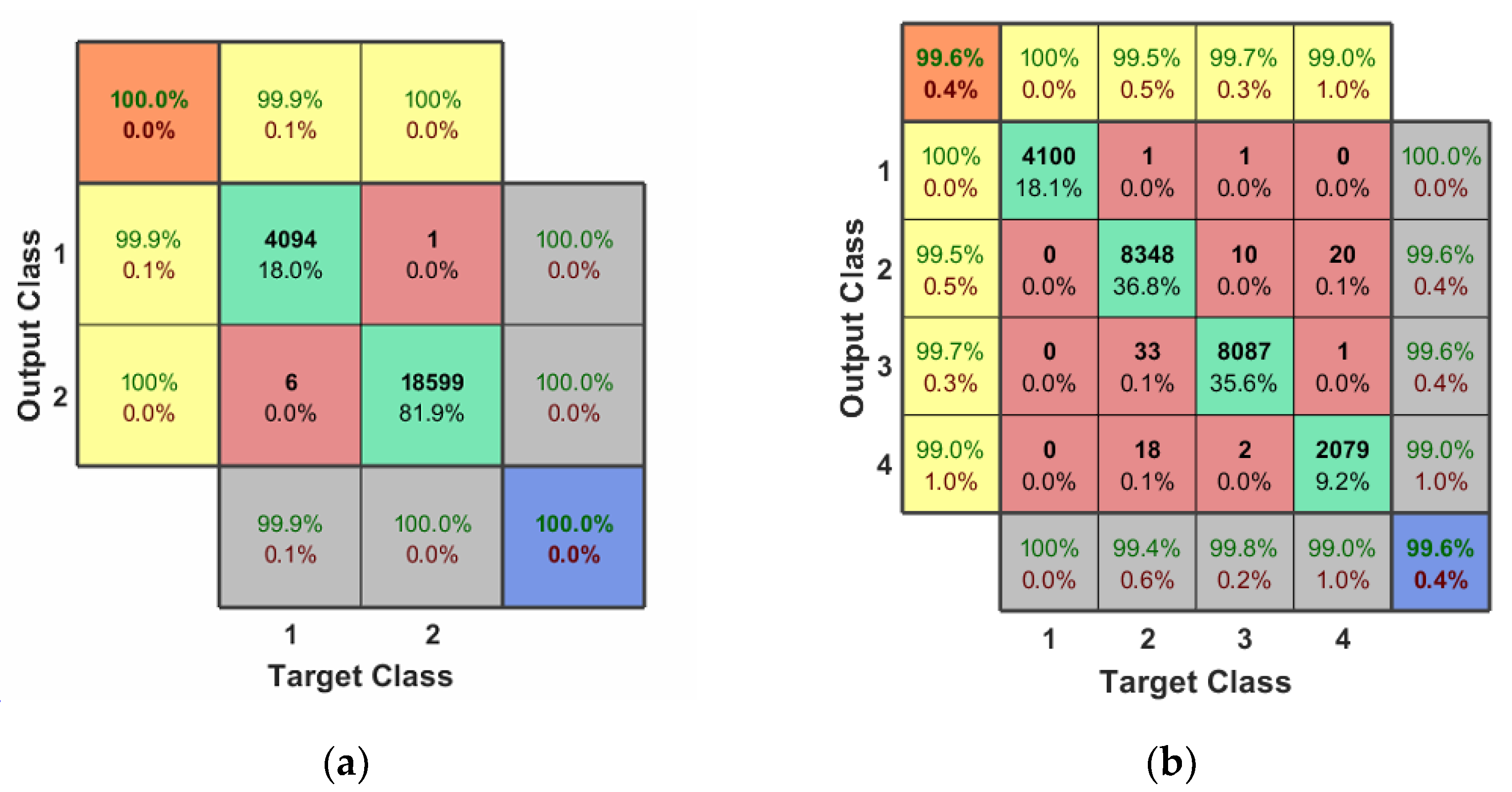
4.3.1. Assessment Indicators
4.3.2. Experimental Results
5. Comparison with Other Methods
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aragón, R.V.; Castaño, C.R.; Correa, A.C. Impact and Technological Innovation of UAS/Drones in the World Economy: VI International Conference on Innovation and Trends in Engineering (CONIITI 2020). In Proceedings of the 2020 Congreso Internacional de Innovación y Tendencias en Ingeniería (CONIITI), Bogota, Colombia, 30 September–2 October 2020. [Google Scholar]
- Wang, S. On the harm of black flight of drones to civil aviation flights. Econ. Trade Pract. 2017, 24, 337. (In Chinese) [Google Scholar]
- Hao, Q.; Chen, L. Saudi Arabia Has Taken Control of Fires Caused by Houthi Attacks on Oil Fields That Have Not Affected Production. Available online: https://baijiahao.baidu.com/s?id=1642249467416436888&wfr=spider&for=pc (accessed on 15 April 2022).
- Yemen’s Houthis Use Drones to Attack Multiple Targets in Saudi Arabia. Available online: https://baijiahao.baidu.com/s?id=1716994090457160779&wfr=spider&for=pc (accessed on 15 April 2022).
- Xie, Y.; Ran, T. Urban-Security-Oriented Low Slow Small Target Detection. In Proceedings of the 2012 Second International Conference on Instrumentation, Measurement, Computer, Communication and Control, Harbin, China, 8–10 December 2012. [Google Scholar]
- Hommes, A.; Shoykhetbrod, A.; Noetel, D.; Stanko, S.; Laurenzis, M.; Hengy, S.; Christnacher, F. Detection of acoustic, electro-optical and RADAR signatures of small unmanned aerial vehicles (Invited Paper). Proc. SPIE 2016, 9997. [Google Scholar] [CrossRef]
- Bernardini, A.; Mangiatordi, F.; Pallotti, E.; Capodiferro, L. Drone detection by acoustic signature identification. Electron. Imaging 2017, 29, 60–64. [Google Scholar] [CrossRef]
- Liu, H.; Wei, Z.; Chen, Y.; Pan, J.; Lin, L.; Ren, Y. Drone Detection Based on an Audio-Assisted Camera Array. In Proceedings of the 2017 IEEE Third International Conference on Multimedia Big Data (BigMM), Laguna Hills, CA, USA, 19–21 April 2017; pp. 402–406. [Google Scholar]
- Unlu, E.; Zenou, E.; Riviere, N.; Dupouy, P.-E. Deep learning-based strategies for the detection and tracking of drones using several cameras. IPSJ Trans. Comput. Vis. Appl. 2019, 11, 7. [Google Scholar] [CrossRef] [Green Version]
- Martelli, T.; Murgia, F.; Colone, F.; Bongioanni, C.; Lombardo, P. Detection and 3D localization of ultralight aircrafts and drones with a WiFi-based passive radar. In Proceedings of the International Conference on Radar Systems (Radar 2017), Belfast, UK, 23–26 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Hua, X.; Ono, Y.; Peng, L.; Cheng, Y.; Wang, H. Target Detection Within Nonhomogeneous Clutter Via Total Bregman Divergence-Based Matrix Information Geometry Detectors. IEEE Trans. Signal Process. 2021, 69, 4326–4340. [Google Scholar] [CrossRef]
- Liu, J.; Liu, W.; Hao, C.; Orlando, D. Persymmetric Subspace Detectors with Multiple Observations in Homogeneous Environments. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3276–3284. [Google Scholar] [CrossRef]
- Wax, M.; Adler, A. Detection of the Number of Signals by Signal Subspace Matching. IEEE Trans. Signal Process. 2021, 69, 973–985. [Google Scholar] [CrossRef]
- Taha, B.; Shoufan, A. Machine Learning-Based Drone Detection and Classification: State-of-the-Art in Research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Nguyen, P.; Truong, H.; Ravindranathan, M.; Nguyen, A.; Han, R.; Vu, T. Cost-Effective and Passive RF-Based Drone Presence Detection and Characterization. GetMobile Mob. Comput. Commun. 2018, 21, 30–34. [Google Scholar] [CrossRef]
- Bourguignon, S.; Carfantan, H.; Idier, J. A Sparsity-Based Method for the Estimation of Spectral Lines from Irregularly Sampled Data. IEEE J. Sel. Top. Signal Process. 2007, 1, 575–585. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Smaili, S.; Massoud, Y. A Multi-Channel Random Demodulation Reconfigurable Receiver. IEEE Wirel. Commun. Lett. 2014, 3, 561–564. [Google Scholar] [CrossRef]
- Allahham, M.S.; Al-Sa’d, M.F.; Al-Ali, A.; Mohamed, A.; Khattab, T.; Erbad, A. DroneRF dataset: A dataset of drones for RF-based detection, classification, and identification. Data Brief 2019, 26, 104313. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.; Ravindranatha, M.; Nguyen, A.; Han, R.; Vu, T. Investigating Cost-effective RF-based Detection of Drones. In Proceedings of the 2nd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use (DroNet’16); Association for Computing Machinery: New York, NY, USA, 2016; pp. 17–22. [Google Scholar] [CrossRef]
- Daponte, P.; De Vito, L.; Picariello, F.; Rapuano, S.; Tudosa, I. Compressed Sensing Technologies and Challenges for Aerospace and Defense RF Source Localization. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018. [Google Scholar] [CrossRef]
- Huang, L.; Li, X.; Huang, M.; Li, Q.; Zhao, B.; Sun, W.; Zhang, P. Compressed sampling techniques for UAV data return:opportunities and challenges. J. Shenzhen Univ. 2019, 36, 473–481. (In Chinese) [Google Scholar]
- Zhu, L.; Zhang, S.; Ma, Q.; Zhao, H.; Chen, S.; Wei, D. Classification of UAV-to-Ground Targets Based on Enhanced Micro-Doppler Features Extracted via PCA and Compressed Sensing. IEEE Sens. J. 2020, 20, 14360–14368. [Google Scholar] [CrossRef]
- Gaigals, G.; Vavilina, E. Simulation of compressed sensing based passive radar for drone detection. In Proceedings of the 2017 5th IEEE Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE), Riga, Latvia, 24–25 November 2017. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Micro-UAV Detection and Classification from RF Fingerprints Using Machine Learning Techniques. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019. [Google Scholar] [CrossRef] [Green Version]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Detection and Classification of UAVs Using RF Fingerprints in the Presence of Wi-Fi and Bluetooth Interference. IEEE Open J. Commun. Soc. 2019, 1, 60–76. [Google Scholar] [CrossRef]
- Medaiyese, O.; Syed, A.; Lauf, A.P. Machine Learning Framework for RF-Based Drone Detection and Identification System. In Proceedings of the 2021 2nd International Conference on Smart Cities, Automation & Intelligent Computing Systems (ICON-SONICS), Tangerang, Indonesia, 12–13 October 2021. [Google Scholar] [CrossRef]
- Nemer, I.; Sheltami, T.; Ahmad, I.; Yasar, A.U.-H.; Abdeen, M.A.R. RF-Based UAV Detection and Identification Using Hierarchical Learning Approach. Sensors 2021, 21, 1947. [Google Scholar]
- Al-Sa’D, M.; Al-Ali, A.; Mohamed, A.; Khattab, T.; Erbad, A. RF-based drone detection and identification using deep learning approaches: An initiative towards a large open source drone database. Futur. Gener. Comput. Syst. 2019, 100, 86–97. [Google Scholar] [CrossRef]
- Al-Emadi, S.; Al-Senaid, F. Drone Detection Approach Based on Radio-Frequency Using Convolutional Neural Network. In Proceedings of the 2020 IEEE International Conference on Informatics, IoT, and Enabling Technologies (ICIoT), Doha, Qatar, 2–5 February 2020. [Google Scholar] [CrossRef]
- Shi, H.-D.; Lu, H.; Bian, Z.-A. Deep convolutional network multi-target UAV signal detection method. J. Air Force Eng. Univ. 2021, 22, 29–34. (In Chinese) [Google Scholar]
- Tropp, J.; Wakin, M.; Duarte, M.; Baron, D.; Baraniuk, R. Random Filters for Compressive Sampling and Reconstruction. In Proceedings of the 2006 IEEE International Conference on Acoustics Speech and Signal Processing Proceedings, Toulouse, France, 14–19 May 2006. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L.; Huo, X. Uncertainty principles and ideal atomic decomposition. IEEE Trans. Inf. Theory 2001, 47, 2845–2862. [Google Scholar] [CrossRef] [Green Version]
- Kirolos, S.; Laska, J.; Wakin, M.; Duarte, M.; Baron, D.; Ragheb, T.; Massoud, Y.; Baraniuk, R. Analog-to-Information Conversion via Random Demodulation. In Proceedings of the IEEE Dallas/CAS Workshop on Design, Application, Integration and Software, Richardson, TX, USA, 29–30 October 2006. [Google Scholar] [CrossRef] [Green Version]
- Mishali, M.; Eldar, Y.C. Blind Multiband Signal Reconstruction: Compressed Sensing for Analog Signals. IEEE Trans. Signal Process. 2009, 57, 993–1009. [Google Scholar] [CrossRef] [Green Version]





| Class-2 | Class-4 | Class-10 | Segments | Ratio |
|---|---|---|---|---|
| No UAV | No UAV | No UAV | 41 | 18.06% |
| UAV | Bebop | On, connected, off | 21 | 9.25% |
| Hovering | 21 | 9.25% | ||
| Flying | 21 | 9.25% | ||
| Flying with video recording | 21 | 9.25% | ||
| AR | On, connected, off | 21 | 9.25% | |
| Hovering | 21 | 9.25% | ||
| Flying | 21 | 9.25% | ||
| Flying with video recording | 18 | 7.94% | ||
| Phantom 3 | On, connected, off | 21 | 9.25% |
| Experiments | Epochs | Batch Size | Activation Functions | Loss | Learning_Rate |
|---|---|---|---|---|---|
| Detector | 30 | 10 | Sigmoid | mse | Default |
| Classifier1 | 200 | 20 | Softmax | CrossEntropy | Default |
| Classifier23 | 300 | 120 | Softmax | CrossEntropy | 0.00003 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, Y.; Huang, J.; Qian, G. Deep Learning Approach to UAV Detection and Classification by Using Compressively Sensed RF Signal. Sensors 2022, 22, 3072. https://doi.org/10.3390/s22083072
Mo Y, Huang J, Qian G. Deep Learning Approach to UAV Detection and Classification by Using Compressively Sensed RF Signal. Sensors. 2022; 22(8):3072. https://doi.org/10.3390/s22083072
Chicago/Turabian StyleMo, Yongguang, Jianjun Huang, and Gongbin Qian. 2022. "Deep Learning Approach to UAV Detection and Classification by Using Compressively Sensed RF Signal" Sensors 22, no. 8: 3072. https://doi.org/10.3390/s22083072
APA StyleMo, Y., Huang, J., & Qian, G. (2022). Deep Learning Approach to UAV Detection and Classification by Using Compressively Sensed RF Signal. Sensors, 22(8), 3072. https://doi.org/10.3390/s22083072