
Monitoring Single-Phase LV Charging of Electric Vehicles



Abstract
:1. Introduction
2. Materials and Methods
- rms value of the voltage U: ±0.1%, where the declared input voltage = 230;
- indicator : 0.05 for and 5% for , where is the measurement result;
- individual harmonics: 0.05% for <0.01 and 5% for ;
- Total Harmonic Distortion (THD) factor of the voltage and current : 0.05%;
- rms value of the current I: ±0.1%, where the current range = 30;
- active power: ;
- reactive power (according to Budeanu’s concept): .
3. Results and Discussion
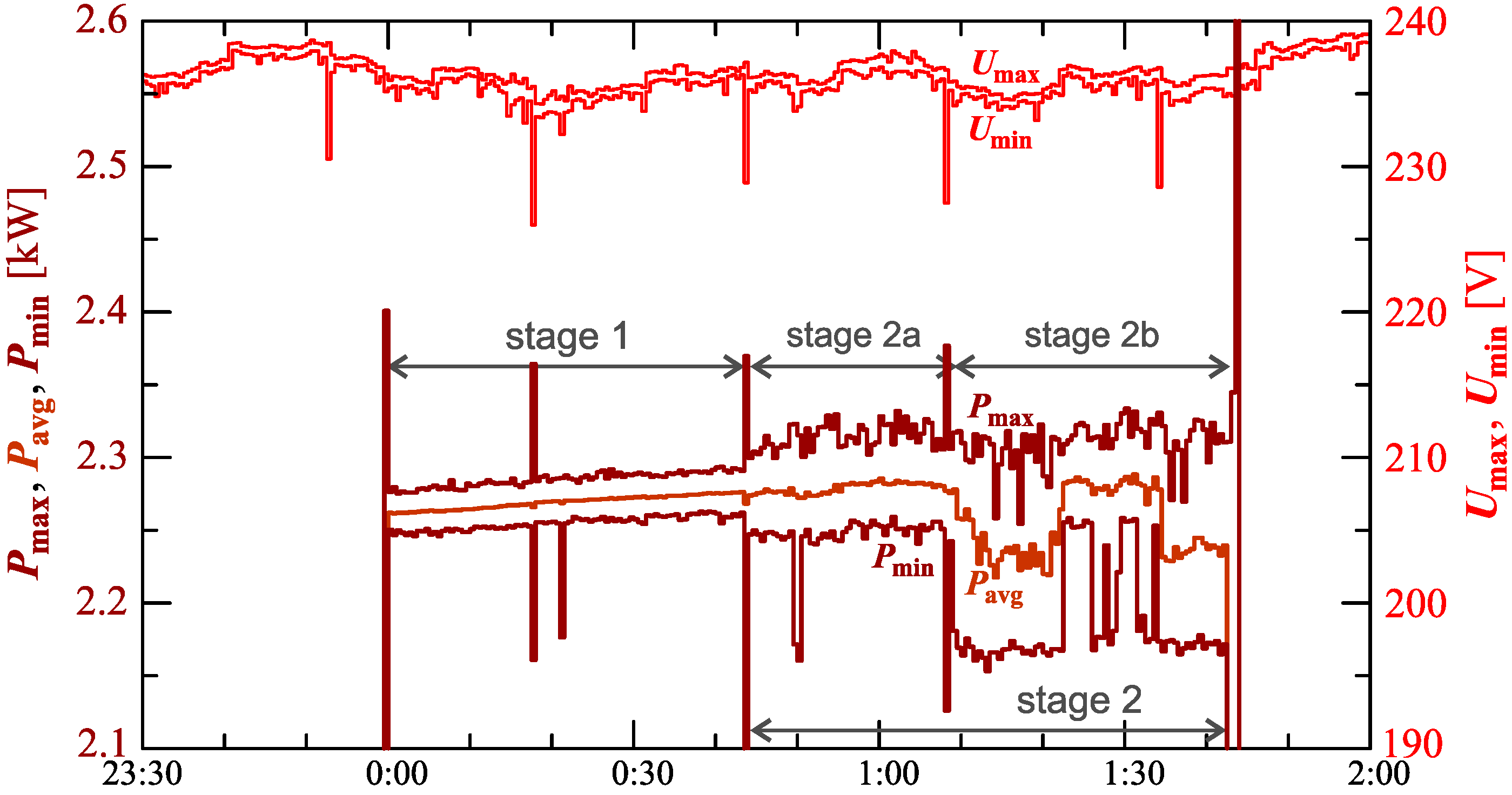
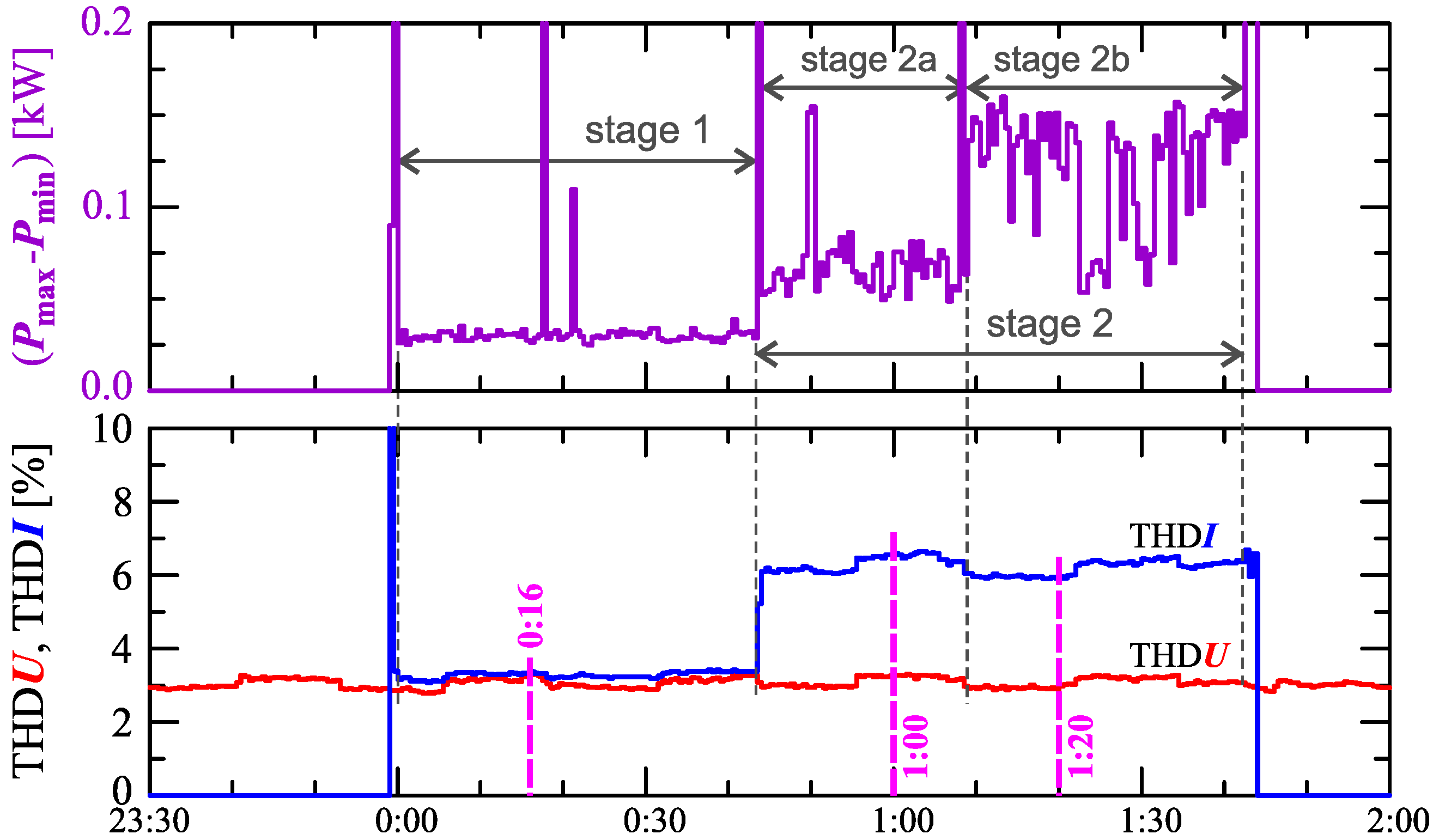
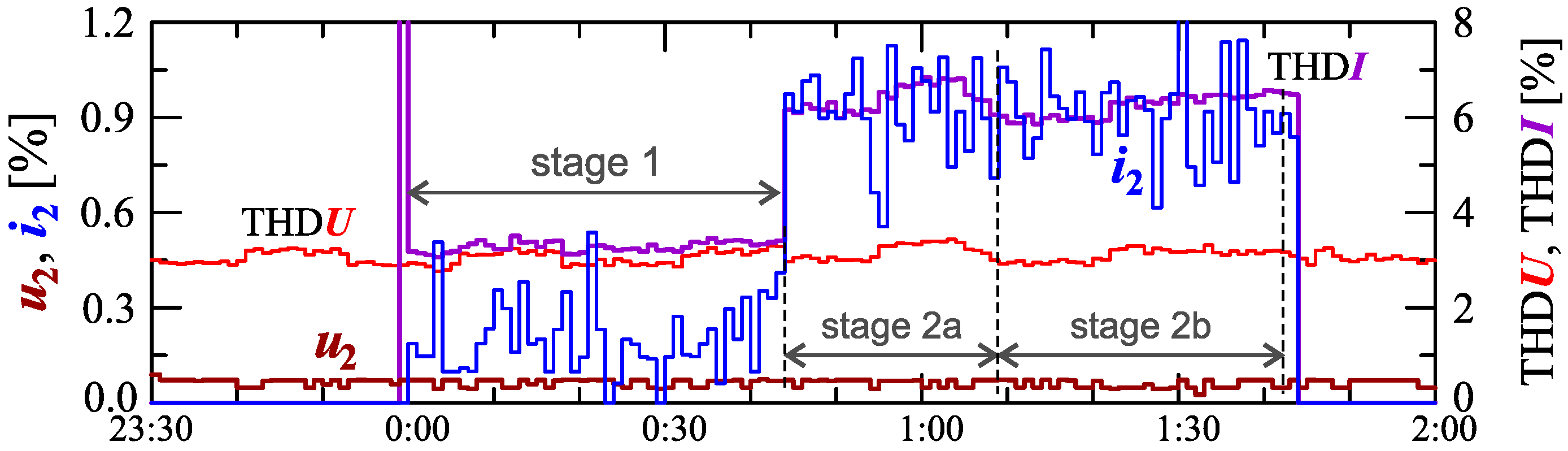
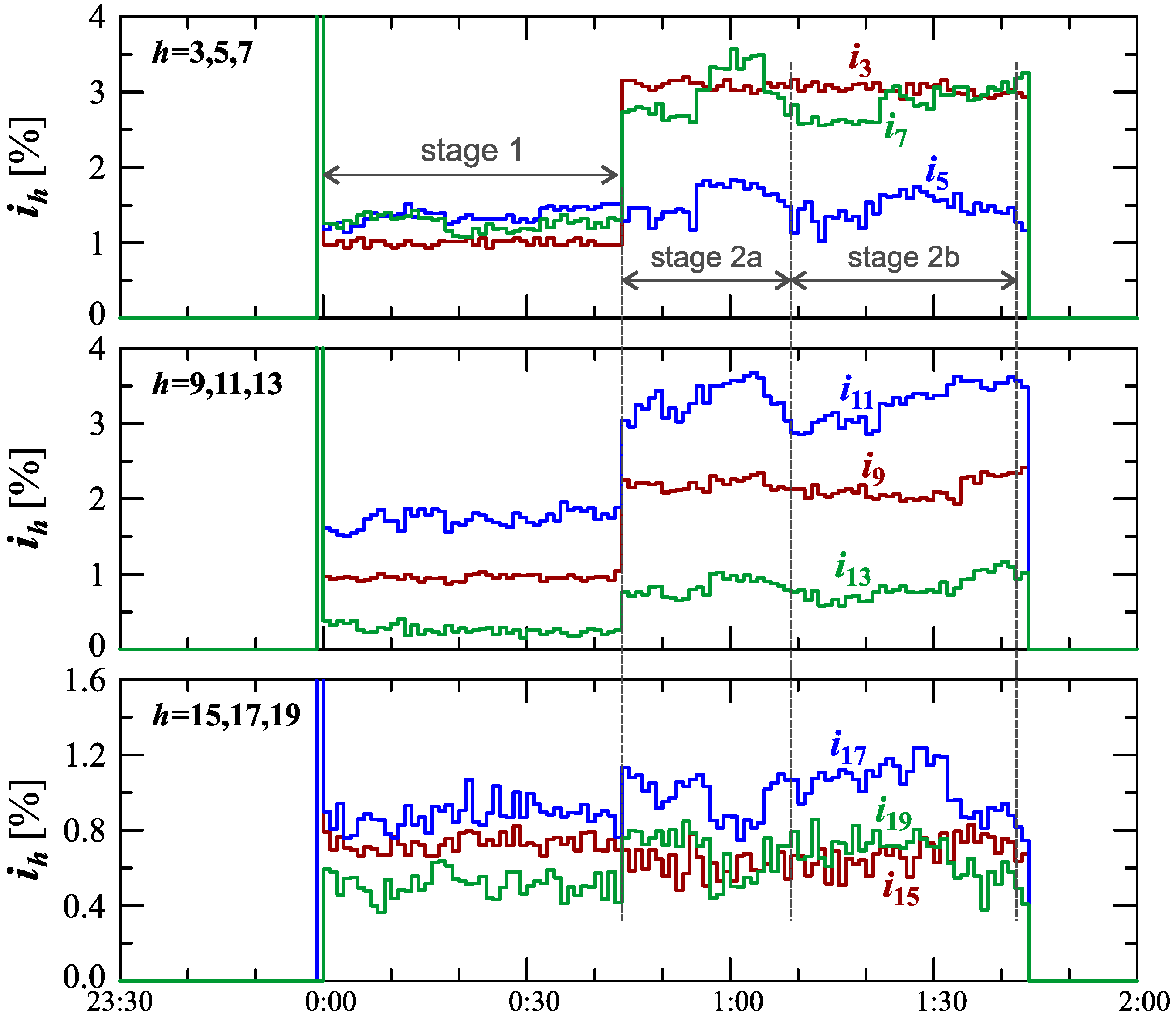
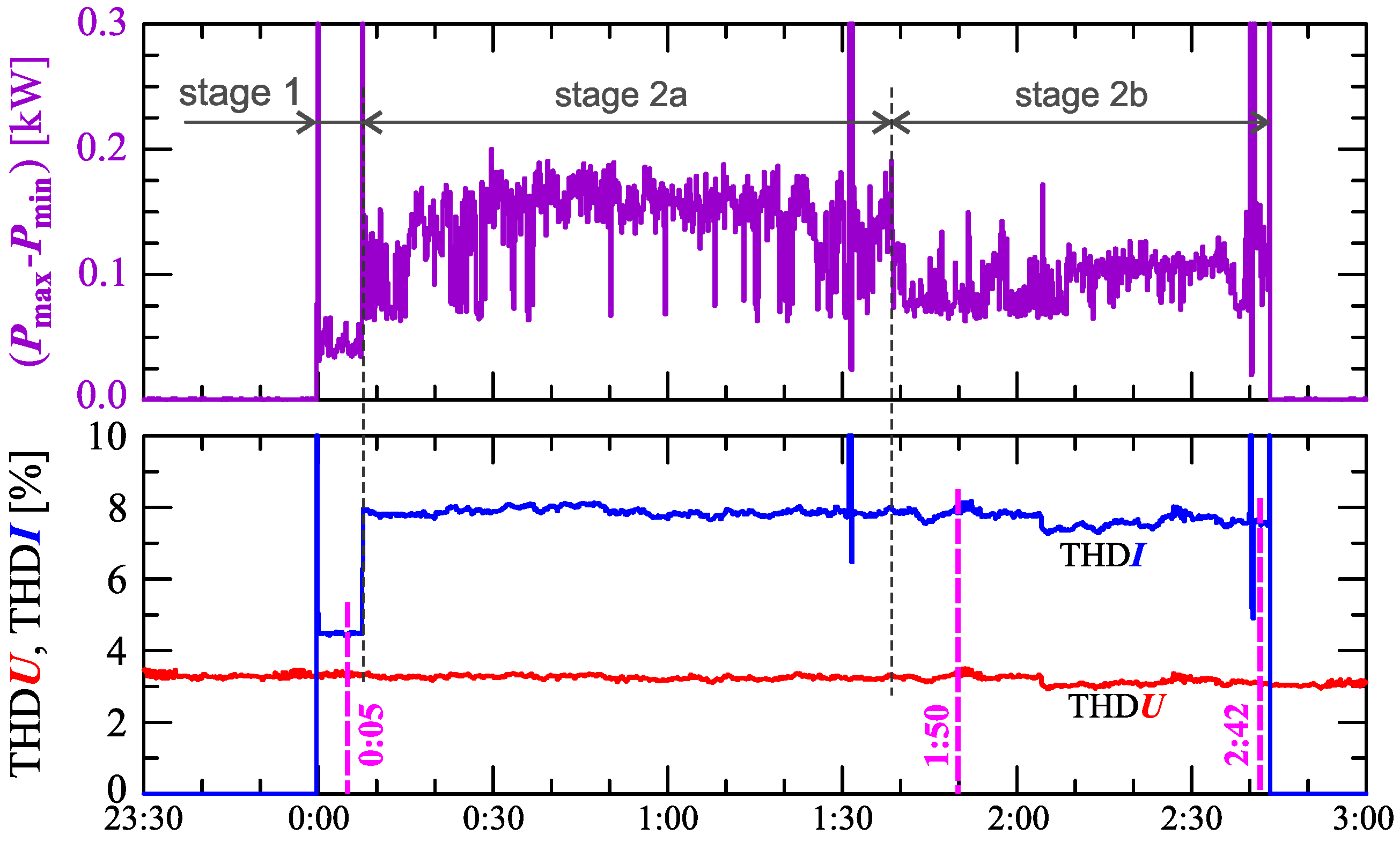
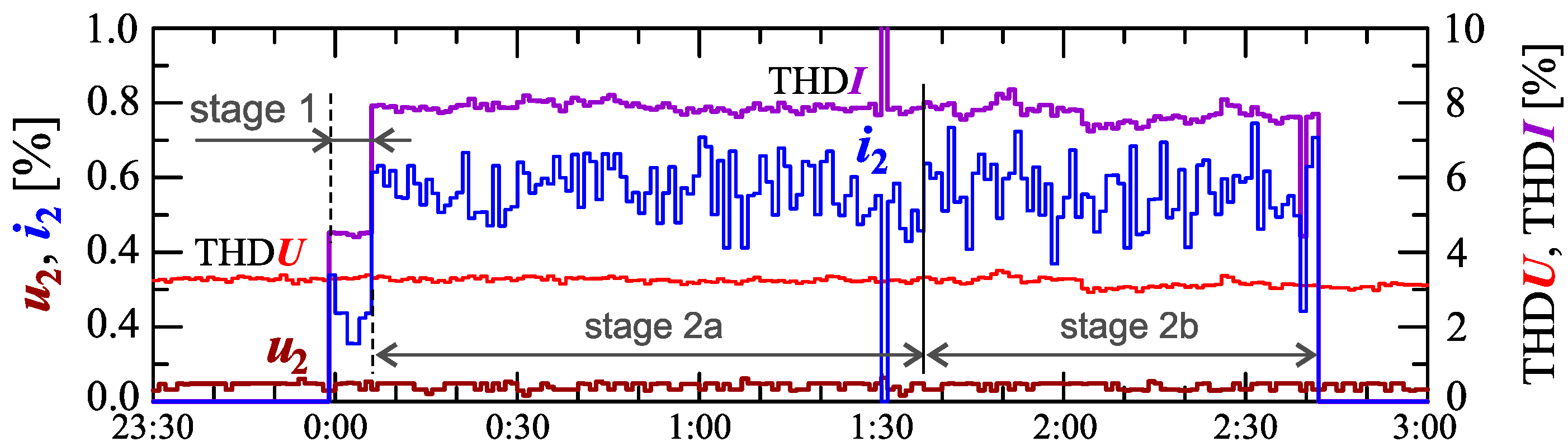
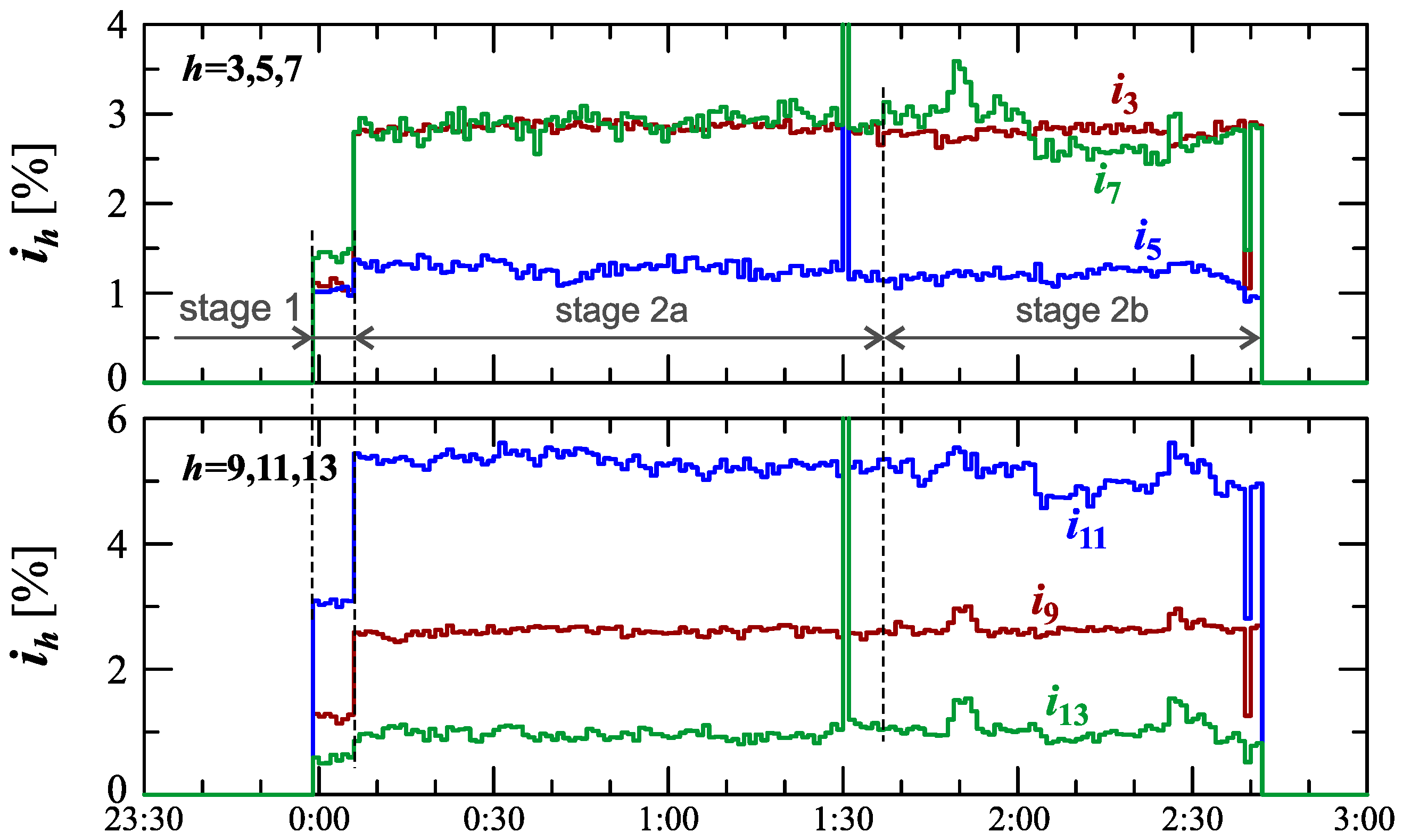
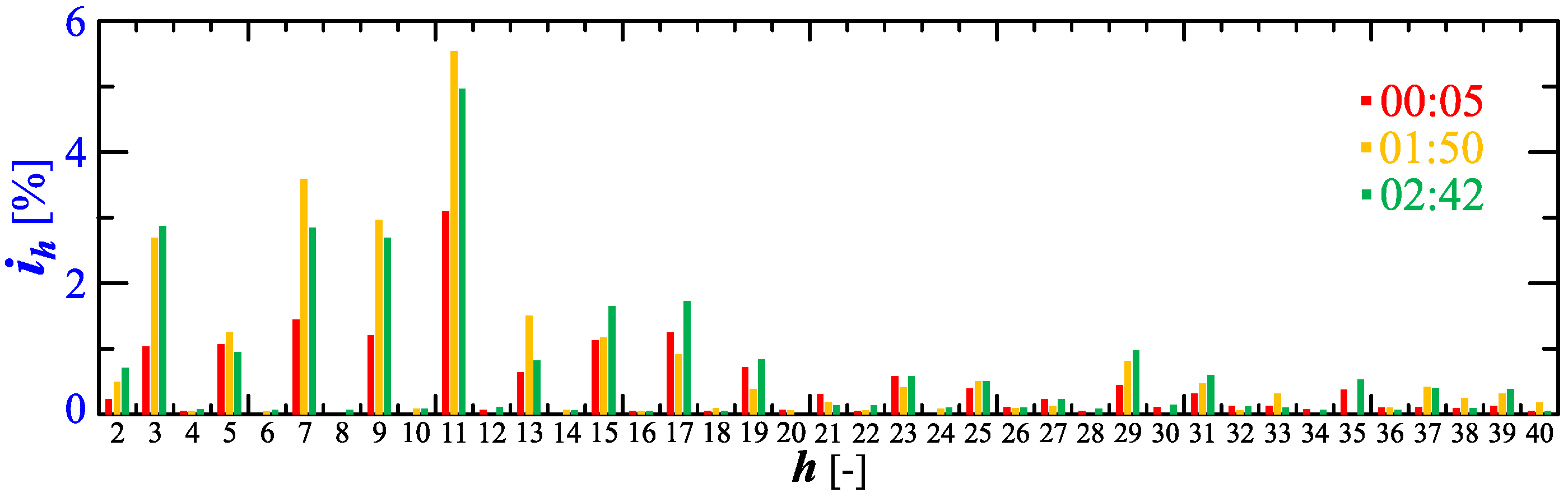
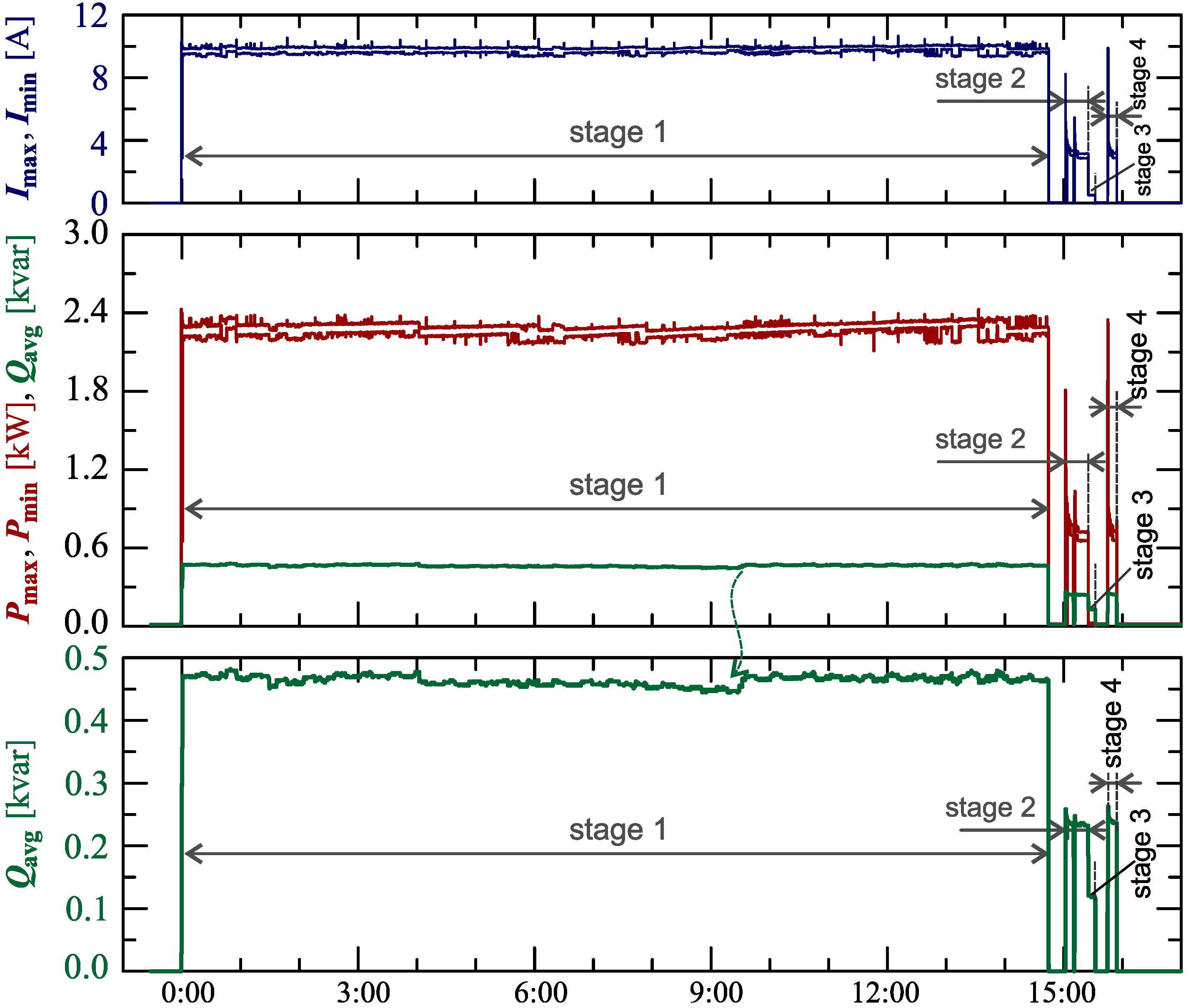
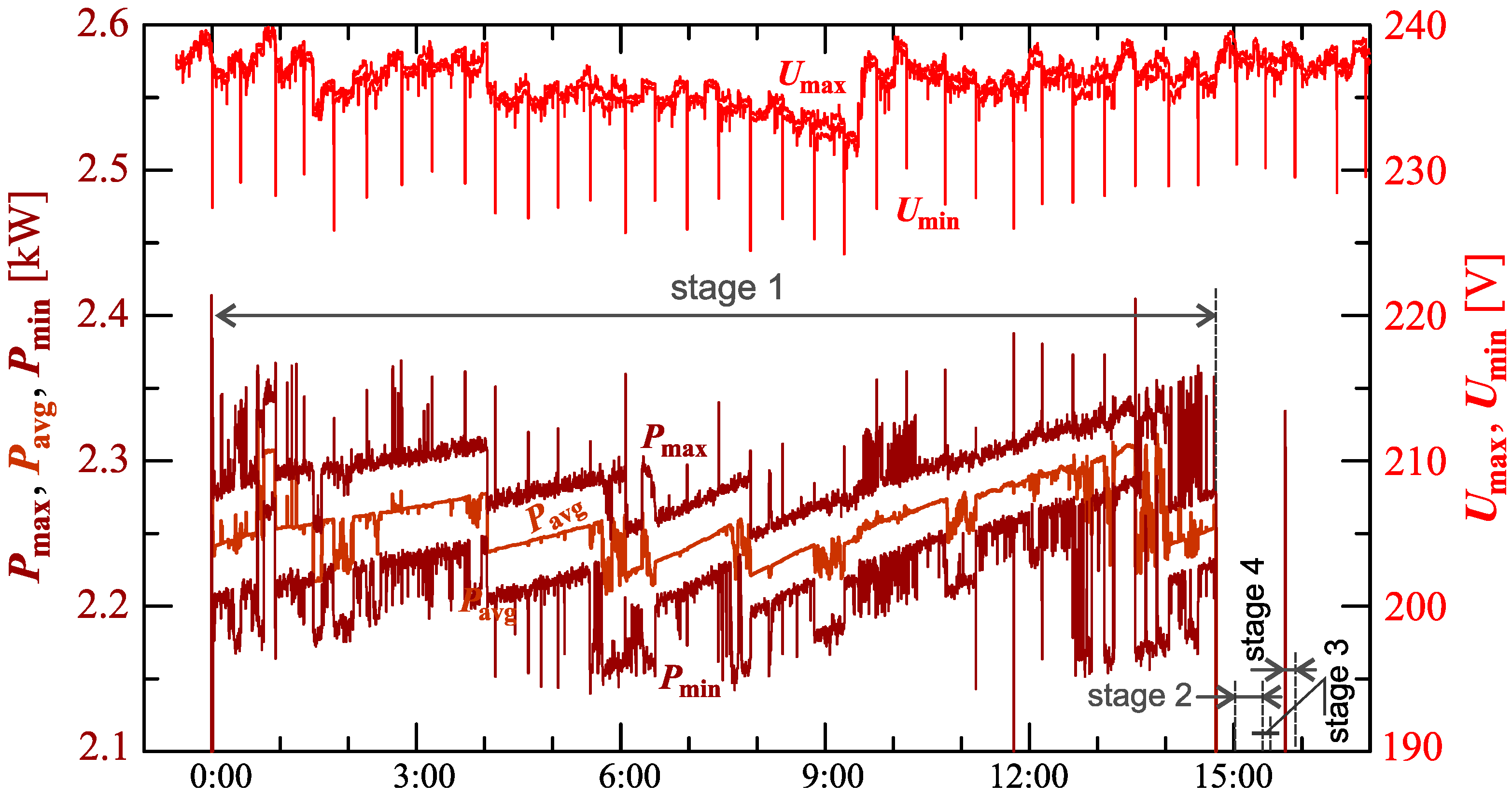
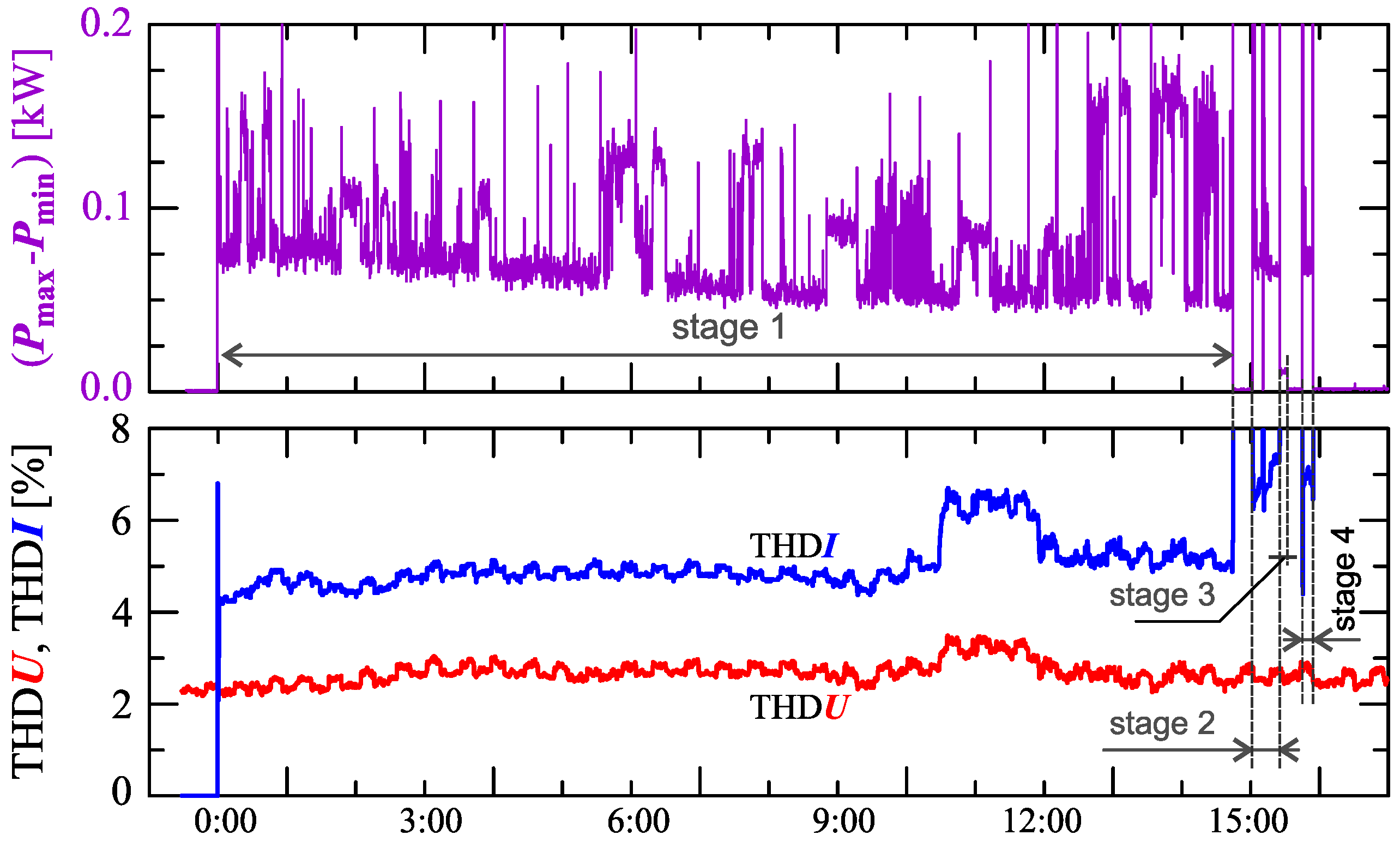
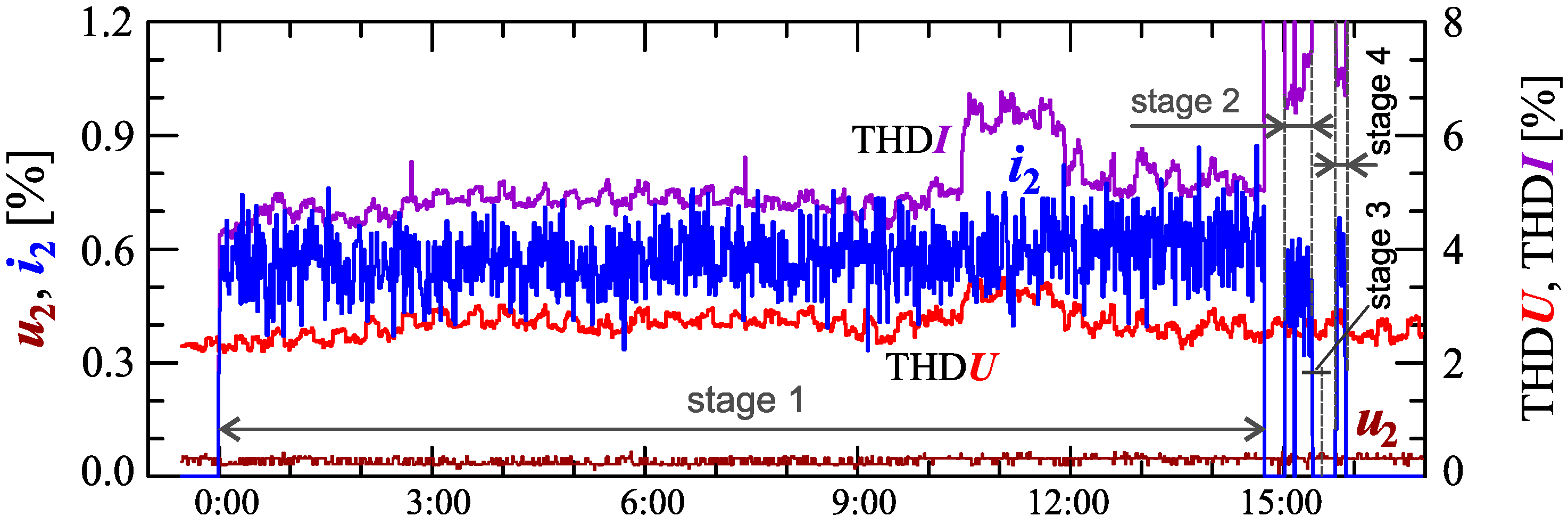
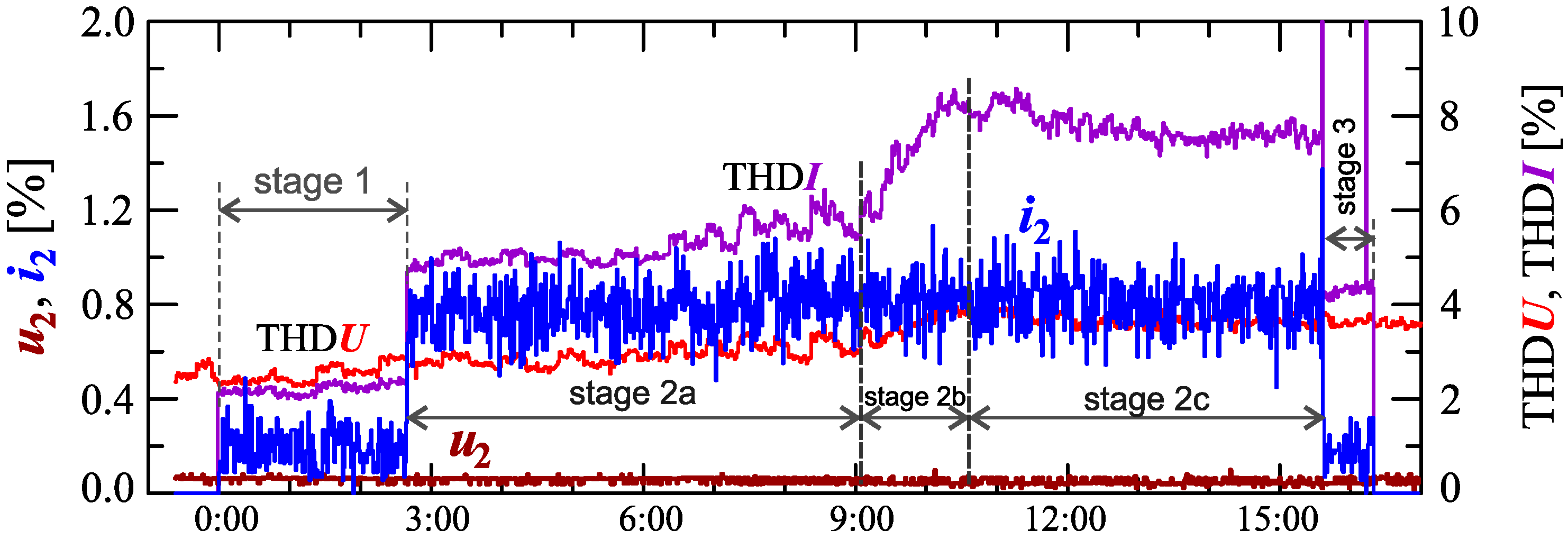
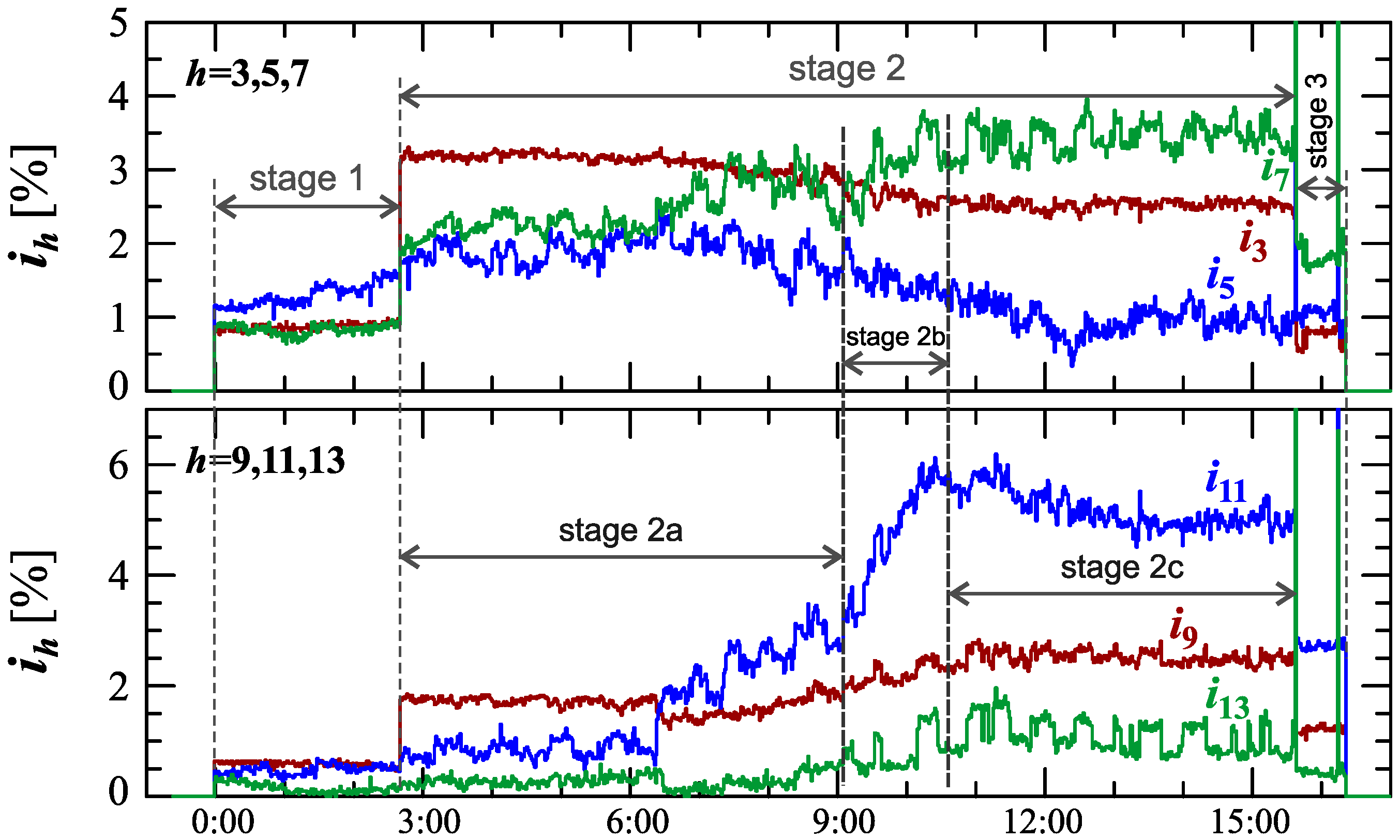
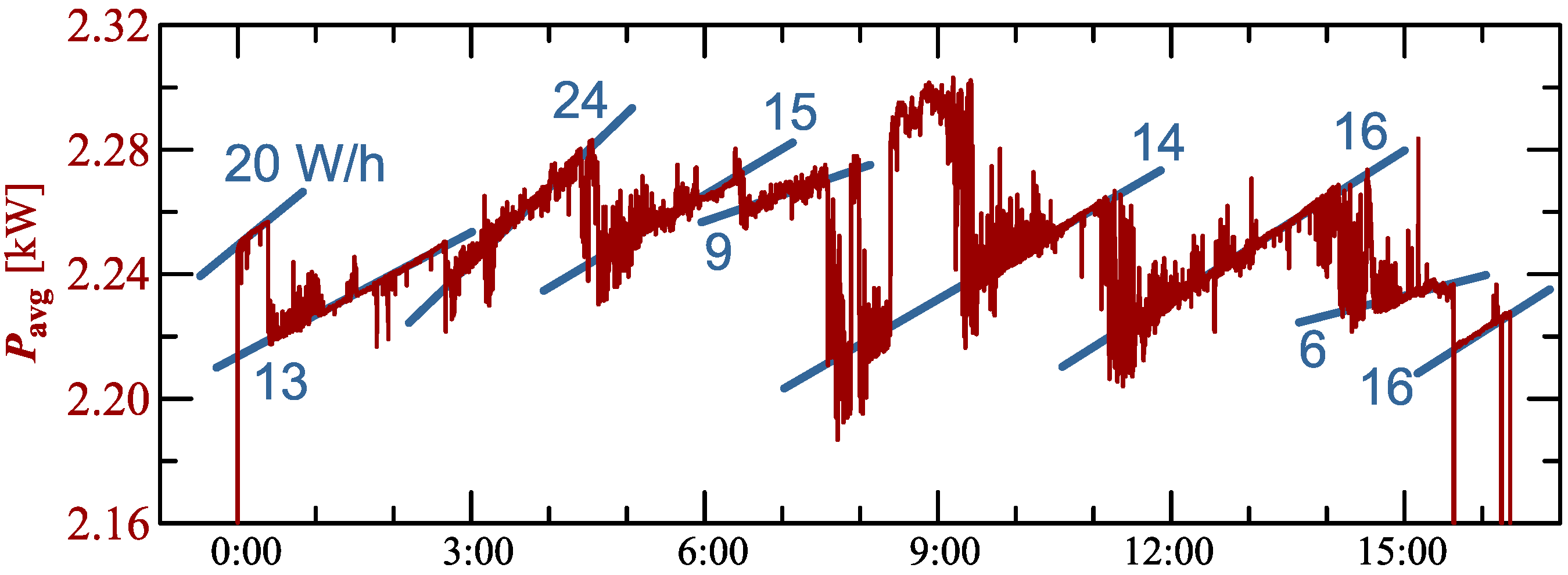
3.1. Case I
3.2. Case II
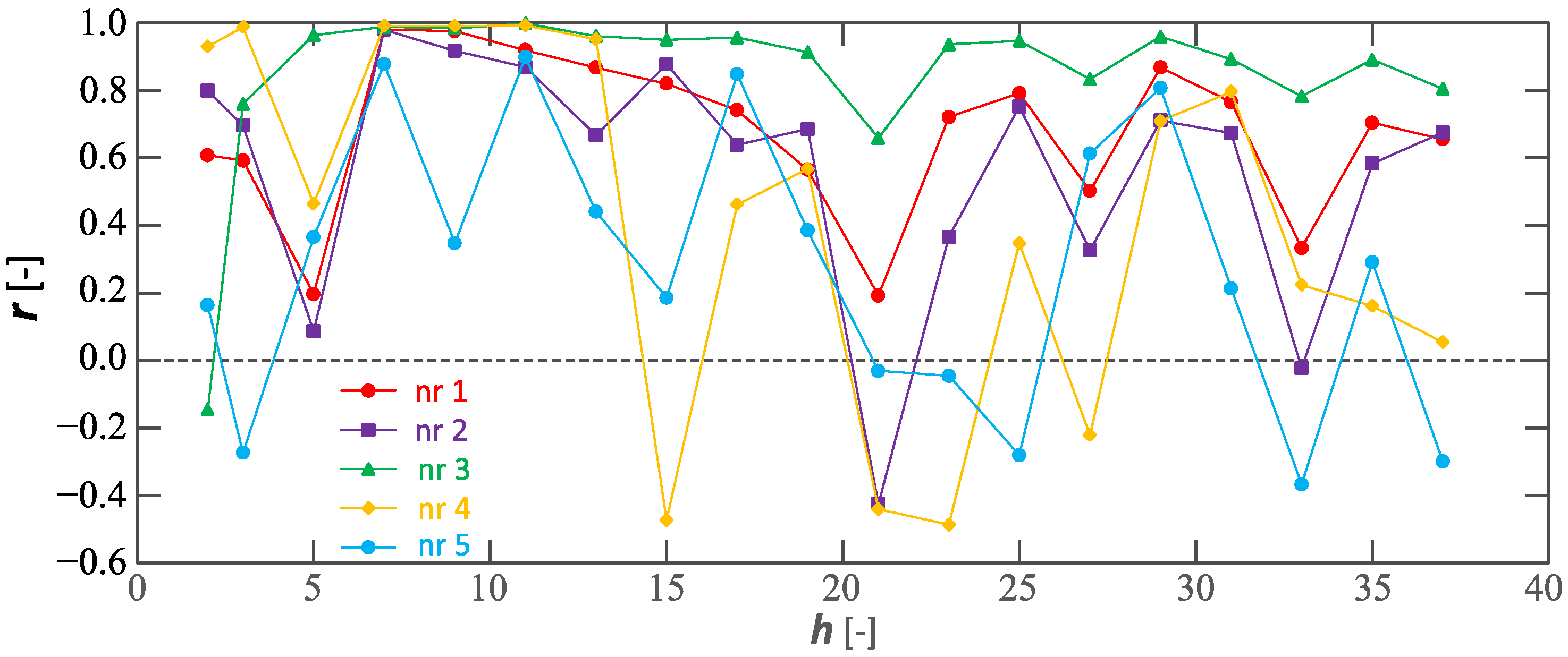
3.3. Other Cases
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- 6th CEER Benchmarking Report on All the Quality of Electricity and Gas Supply 2016. 2016. Available online: https://www.ceer.eu/ (accessed on 1 September 2021).
- Mozaffari, M.; Doshi, K.; Yilmaz, Y.C. Real-Time Detection and Classification of Power Quality Disturbances. Sensors 2022, 22, 7958. [Google Scholar] [CrossRef] [PubMed]
- Valtierra-Rodriguez, M.; Rivera-Guillen, J.R.; Basurto-Hurtado, J.A.; De-Santiago-Perez, J.J.; Granados-Lieberman, D.; Amezquita-Sanchez, J.P.c. Convolutional Neural Network and Motor Current Signature Analysis during the Transient State for Detection of Broken Rotor Bars in Induction Motors. Sensors 2020, 20, 3721. [Google Scholar] [CrossRef]
- Gnacinski, P.; Mindykowski, J.; Tarasiuk, T. Effect of power quality on windings temperature of marine induction motors. Part II: Results of investigations and recommendations for related regulations. Energy Convers. Manag. 2009, 50, 2477–2485. [Google Scholar] [CrossRef]
- Gnacinski, P.; Peplinski, M.; Murawski, L.; Szelezinski, A. Vibration of Induction Machine Supplied With Voltage Containing Subharmonics and Interharmonics. IEEE Trans. Energy Convers. 2019, 34, 1928–1937. [Google Scholar] [CrossRef]
- Holopainen, T.P.; Jorg, P.; Niiranen, J.; Andrea, D. Electric Motors and Drives in Torsional Vibration Analysis and Design. In Proceedings of the 42nd Turbomachinery Symposium, College Station, TX, USA, 1–3 October 2013. [Google Scholar]
- Gonzalez-Abreu, A.D.; Osornio-Rios, R.A.; Jaen-Cuellar, A.Y.; Delgado-Prieto, M.; Antonino-Daviu, J.A.; Karlis, A. Advances in Power Quality Analysis Techniques for Electrical Machines and Drives: A Review. Energies 2022, 15, 1909. [Google Scholar] [CrossRef]
- Fuchs, E.; Masoum, M. Power Quality in Power Systems, Electrical Machines, and Power-Electronic Drives, 3rd ed.; Academic Press: Cambridge, MA, USA, 2022. [Google Scholar]
- Ferreira, F.J.T.E.; Baoming, G.; de Almeida, A.T. Reliability and operation of high-efficiency induction motors. In Proceedings of the 2015 IEEE/IAS 51st Industrial & Commercial Power Systems Technical Conference (I&CPS), Calgary, AB, Canada, 5–8 May 2015; pp. 1–13. [Google Scholar] [CrossRef]
- Donolo, P.D.; Pezzani, C.M.; Bossio, G.R.; De Angelo, C.H.; Donolo, M.A. Derating of Induction Motors Due to Power Quality Issues Considering the Motor Efficiency Class. IEEE Trans. Ind. Appl. 2020, 56, 961–969. [Google Scholar] [CrossRef]
- Gnacinski, P.; Hallmann, D.; Peplinski, M.; Jankowski, P. The effects of voltage subharmonics on cage induction machine. Int. J. Electr. Powe Energy Syst. 2019, 111, 125–131. [Google Scholar] [CrossRef]
- Gnacinski, P.; Hallmann, D.; Muc, A.; Klimczak, P.; Peplinski, M. Induction Motor Supplied with Voltage Containing Symmetrical Subharmonics and Interharmonics. Energies 2022, 15, 7712. [Google Scholar] [CrossRef]
- Chauhan, S.; Singh, S.B. Effects of Voltage Unbalance and Harmonics on 3-Phase Induction Motor During the Condition of Undervoltage and Overvoltage. In Proceedings of the 2019 6th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 7–8 March 2019; pp. 1141–1146. [Google Scholar] [CrossRef]
- Gnacinski, P.; Hallmann, D.; Klimczak, P.; Muc, A.; Peplinski, M. Effects of Voltage Interharmonics on Cage Induction Motors. Energies 2021, 14, 1218. [Google Scholar] [CrossRef]
- Kini, G.P.; Bansal, R.C.; Aithal, R.S. Impact of voltage unbalance on the performance of three-phase induction motor. S. Pac. J. Nat. Sci. 2006, 24, 45–50. [Google Scholar] [CrossRef] [Green Version]
- Gumilar, L.; Afandi, A.N.; Sujito; Faiz, M.R. Starting Induction Motor at Different Voltage Levels in the Electrical Power System. In Proceedings of the 2021 International Conference on Electrical and Information Technology (IEIT), Malang, Indonesia, 14–15 September 2021; pp. 269–273. [Google Scholar] [CrossRef]
- Sousa, V.; Hernandez, H.; Quispe, E.C.; Gomez, J.R.; Viego, P.R. Analysis of harmonic distortion generated by PWM motor drives. In Proceedings of the 2017 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA), Bogota, Colombia, 31 May–2 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Masoum, M.; Fuchs, E. Power Quality in Power Systems, Electrical Machines, and Power-Electronic Drives, 2nd ed.; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Siostrzonek, T.; Chmielowiec, K.; Firlit, A.; Barczentewicz, S. Advantages and disadvantages of using multi-pulse systems in the electric drive of hoisting machines. Prz. Elektrotech. 2020, 96, 43–46. [Google Scholar] [CrossRef]
- Langella, R.; Testa, A.; Vendemia, V.; Drapela, J. New Comprehensive Analytical Model of Single-Phase AC/DC Diode Rectifiers in the Presence of Interharmonics in Supply Voltage. In Proceedings of the 2022 20th International Conference on Harmonics and Quality of Power (ICHQP 2022), Naples, Italy, 29 May–1 June 2022. [Google Scholar] [CrossRef]
- Crotti, G.; Chen, Y.; Çayci, H.; D’Avanzo, G.; Landi, C.; Letizia, P.S.; Luiso, M.; Mohns, E.; Muñoz, F.; Styblikova, R.; et al. How Instrument Transformers Influence Power Quality Measurements: A Proposal of Accuracy Verification Tests. Sensors 2022, 22, 5847. [Google Scholar] [CrossRef]
- Ray, P.K. Power quality improvement using VLLMS based adaptive shunt active filter. CPSS Trans. Power Electron. Appl. 2018, 3, 154–162. [Google Scholar] [CrossRef]
- Alali, M.A.E.; Shtessel, Y.B.; Barbot, J.P.; Di Gennaro, S. Sensor Effects in LCL-Type Grid-Connected Shunt Active Filters Control Using Higher-Order Sliding Mode Control Techniques. Sensors 2022, 22, 7516. [Google Scholar] [CrossRef]
- Upadhyay, A.; Mahala, H.c. Review of Shunt Active Power Filters for Compensation. Int. J. Eng. Res. Curr. Trends 2021, 3, 3–4. [Google Scholar]
- Adabara, I.C. Design and Implementation of an Automatic High-Performance Voltage Stabilizer. Int. J. Eng. Inf. Syst. 2018, 2, 1–10. [Google Scholar]
- Karimov, R.C.; Kuchkarov, A.V.; Xodjalimova, M.Z.; Makhamadjanov, R.K.; Numonov, A.B. Analysis and study of energy efficiency by the operation of a voltage stabilizer. J. Phys. Conf. Ser. 2021, 2094, 052050. [Google Scholar] [CrossRef]
- Das, S.R.; Ray, P.K.; Mohanty, A. Improvement in Power Quality using Hybrid Power Filters based on RLS Algorithm. Energy Procedia 2017, 138, 723–728. [Google Scholar] [CrossRef]
- Jarupula, S.; Vutlapalli, N.C. Power Quality Improvement in Distribution System using ANN Based Shunt Active Power Filter. Int. J. Power Electron. Drive Syst. 2015, 5, 568–575. [Google Scholar] [CrossRef]
- Wiczynski, G. Diagnostic capabilities of voltage fluctuation indices—A case study. In Proceedings of the 2012 IEEE 15th International Conference on Harmonics and Quality of Power, Hong Kong, China, 17–20 June 2012; pp. 414–419. [Google Scholar] [CrossRef]
- Edelstein, S. Study suggests EV drivers are more satisfied with wall chargers vs mobile cords. In Green Car Reports; Internet Brands: El Segundo, CA, USA, 2021. [Google Scholar]
- Gomez, J.; Morcos, M. Impact of EV battery chargers on the power quality of distribution systems. IEEE Trans. Power Deliv. 2003, 18, 975–981. [Google Scholar] [CrossRef]
- Enslin, J.; Heskes, P. Harmonic interaction between a large number of distributed power inverters and the distribution network. IEEE Trans. Power Electron. 2004, 19, 1586–1593. [Google Scholar] [CrossRef]
- Pankaj, S.; Khalid, M.R.; Saad Alam, M.; Jamil Asghar, M.S.; Hameed, S. Electric Vehicle Charging Stations and their Impact on the Power Quality of Utility Grid. In Proceedings of the 2022 International Conference on Decision Aid Sciences and Applications (DASA), Chiangrai, Thailand, 23–25 March 2022; pp. 816–821. [Google Scholar] [CrossRef]
- Karmaker, A.K.; Roy, S.; Ahmed, M.R. Analysis of the Impact of Electric Vehicle Charging Station on Power Quality Issues. In Proceedings of the 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 7–9 February 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Alshareef, S.M.; Morsi, W.G. Impact of fast charging stations on the voltage flicker in the electric power distribution systems. In Proceedings of the 2017 IEEE Electrical Power and Energy Conference (EPEC), Saskatoon, SK, Canada, 22–25 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Garn, T.; Vanselow, A.; Biedermann, C.; Moser, A.; Engel, B. Flicker emission of electric vehicle charging in low voltage grids. In Proceedings of the CIRED Porto Workshop 2022: E-mobility and Power Distribution Systems, Porto, Portugal, 2–3 June 2022; pp. 294–298. [Google Scholar] [CrossRef]
- Alshareef, S.M. Analyzing and Mitigating the Impacts of Integrating Fast-Charging Stations on the Power Quality in Electric Power Distribution Systems. Sustainability 2022, 14, 5595. [Google Scholar] [CrossRef]
- Alshareef, S.M. A Novel Smart Charging Method to Mitigate Voltage Fluctuation at Fast Charging Stations. Energies 2022, 15, 1746. [Google Scholar] [CrossRef]
- Slangen, T.; van Wijk, T.; Cuk, V.; Cobben, S. The Propagation and Interaction of Supraharmonics from Electric Vehicle Chargers in a Low-Voltage Grid. Energies 2020, 13, 3865. [Google Scholar] [CrossRef]
- Meyer, J.; Mueller, S.; Ungethuem, S.; Xiao, X.; Collin, A.; Djokic, S. Harmonic and supraharmonic emission of on-board electric vehicle chargers. In Proceedings of the 2016 IEEE PES Transmission & Distribution Conference and Exposition-Latin America (PES T&D-LA), Michoacán, Mexico, 20–24 September 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Thiringer, T.; Haghbin, S. Power Quality Issues of a Battery Fast Charging Station for a Fully-Electric Public Transport System in Gothenburg City. Batteries 2015, 1, 22–33. [Google Scholar] [CrossRef] [Green Version]
- Jiang, C.; Torquato, R.; Salles, D.; Xu, W. Method to Assess the Power-Quality Impact of Plug-in Electric Vehicles. IEEE Trans. Power Deliv. 2014, 29, 958–965. [Google Scholar] [CrossRef]
- Wang, L.; Qin, Z.; Slangen, T.; Bauer, P.; van Wijk, T. Grid Impact of Electric Vehicle Fast Charging Stations: Trends, Standards, Issues and Mitigation Measures—An Overview. IEEE Open J. Power Electron. 2021, 2, 56–74. [Google Scholar] [CrossRef]
- Ahmed, M.A.; El-Sharkawy, M.R.; Kim, Y.C. Remote Monitoring of Electric Vehicle Charging Stations in Smart Campus Parking Lot. J. Mod. Power Syst. Clean Energy 2020, 8, 124–132. [Google Scholar] [CrossRef]
- Alshahrani, S.; Khalid, M.; Almuhaini, M. Electric Vehicles Beyond Energy Storage and Modern Power Networks: Challenges and Applications. IEEE Access 2019, 7, 99031–99064. [Google Scholar] [CrossRef]
- Martinez-Lao, J.; Montoya, F.G.; Montoya, M.G.; Manzano-Agugliaro, F. Electric vehicles in Spain: An overview of charging systems. Renew. Sustain. Energy Rev. 2017, 77, 970–983. [Google Scholar] [CrossRef]
- EN 50160:2010/A2:2019; Voltage Characteristics of Electricity Supplied by Public Electricity Networks. European Committee for Electrotechnical Standardization (CENELEC): Brussels, Belgium, 2019.
- Energy Measurements System SPE ENERGO, User Manual; ZAP MikroTom: Poznań, Poland, 2012.
- Kyoritsu Electrical Instruments Works, LTD. Line Up of Clamp Sensors Series, User Manual; Kyoritsu: Tokyo, Japan, 2006. [Google Scholar]
- IEC 61000-4-30:2015/AMD1:2021; Testing and Measurement Techniques—Power Quality Measurement Methods. The International Electrotechnical Commission (IEC): Geneva, Switzerland, 2021.
- Tao, H.; Zhang, G.; Zheng, Z. Onboard Charging DC/DC Converter of Electric Vehicle Based on Synchronous Rectification and Characteristic Analysis. Renew. Sustain. Energy Rev. 2019, 2613893. [Google Scholar] [CrossRef]
- Metwly, M.Y.; Abdel-Majeed, M.S.; Abdel-Khalik, A.S.; Hamdy, R.A.; Hamad, M.S.; Ahmed, S. A Review of Integrated On-Board EV Battery Chargers: Advanced Topologies, Recent Developments and Optimal Selection of FSCW Slot/Pole Combination. IEEE Access 2020, 8, 85216–85242. [Google Scholar] [CrossRef]
- Xie, F.; Liu, X.; Cui, S.; Li, K. Design of Power Factor Correction System for On-board Charger. In Intelligent Computing in Smart Grid and Electrical Vehicles; Li, K., Xue, Y., Cui, S., Niu, Q., Eds.; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Dewangan, S.K.; Sahu, L.K.; Tiwari, A.K. Single Phase Isolated Onboard Charger for Electric Vehicle. In Proceedings of the 2022 2nd Asian Conference on Innovation in Technology (ASIANCON), Ravet, India, 26–28 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Mallik, A.; Lu, J.; Khaligh, A. Sliding Mode Control of Single-Phase Interleaved Totem-Pole PFC for Electric Vehicle Onboard Chargers. IEEE Trans. Veh. Technol. 2018, 67, 8100–8109. [Google Scholar] [CrossRef]
- Sharma, U.; Singh, B. A Non-isolated Onboard Charger for Electric Vehicle. In Proceedings of the 2021 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 21–25 June 2021; pp. 446–451. [Google Scholar] [CrossRef]
- Teng, J.H.; Liao, S.H.; Wen, C.K. Design of a Fully Decentralized Controlled Electric Vehicle Charger for Mitigating Charging Impact on Power Grids. IEEE Trans. Ind. Appl. 2017, 53, 1497–1505. [Google Scholar] [CrossRef]
- Gupta, J.; Singh, B.; Kushwaha, R. A Rooftop Solar PV Assisted On-Board Enhanced Power Quality Charging System for E-Rickshaw. In Proceedings of the 2020 International Conference on Power, Instrumentation, Control and Computing (PICC), Online, 28–29 August 2020; pp. 1–6. [Google Scholar] [CrossRef]
- IEC 61000-4-7:2002/A1:2008. Testing and Measurement Techniques—General Guide on Harmonics and Interharmonics Measurements and iNstrumentation, for Power Supply Systems and Equipment Connected Thereto. The International Electrotechnical Commission (IEC): Geneva, Switzerland, 2009.
- Kuwalek, P.; Otomanski, P.; Wandachowicz, K. Influence of the Phenomenon of Spectrum Leakage on the Evaluation Process of Metrological Properties of Power Quality Analyser. Energies 2020, 13, 5338. [Google Scholar] [CrossRef]
- Carpinelli, G.; Bracale, A.; Varilone, P.; Sikorski, T.; Kostyla, P.; Leonowicz, Z. A New Advanced Method for an Accurate Assessment of Harmonic and Supraharmonic Distortion in Power System Waveforms. IEEE Access 2021, 9, 88685–88698. [Google Scholar] [CrossRef]









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | [kWh] | [kvarh] | [min] | [s] | Remarks |
|---|---|---|---|---|---|
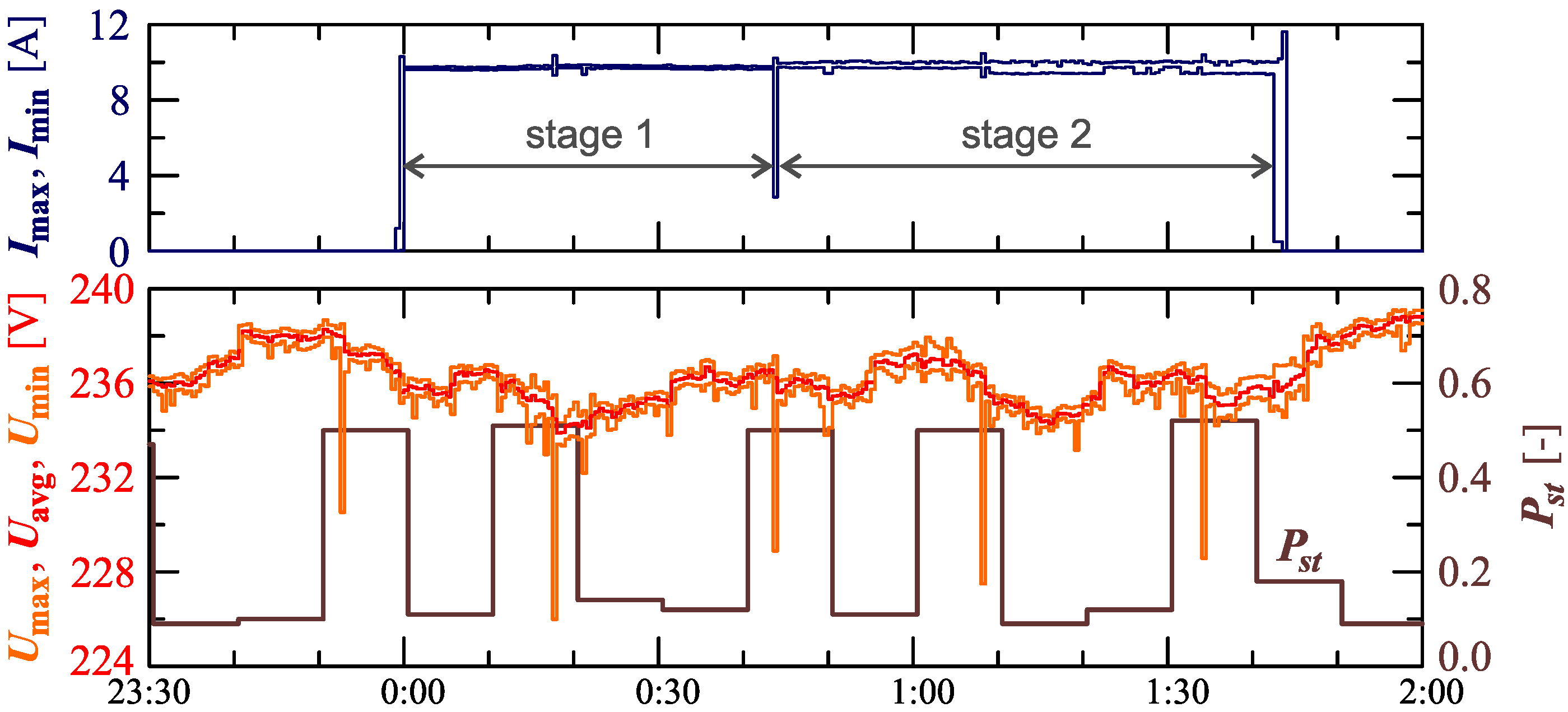
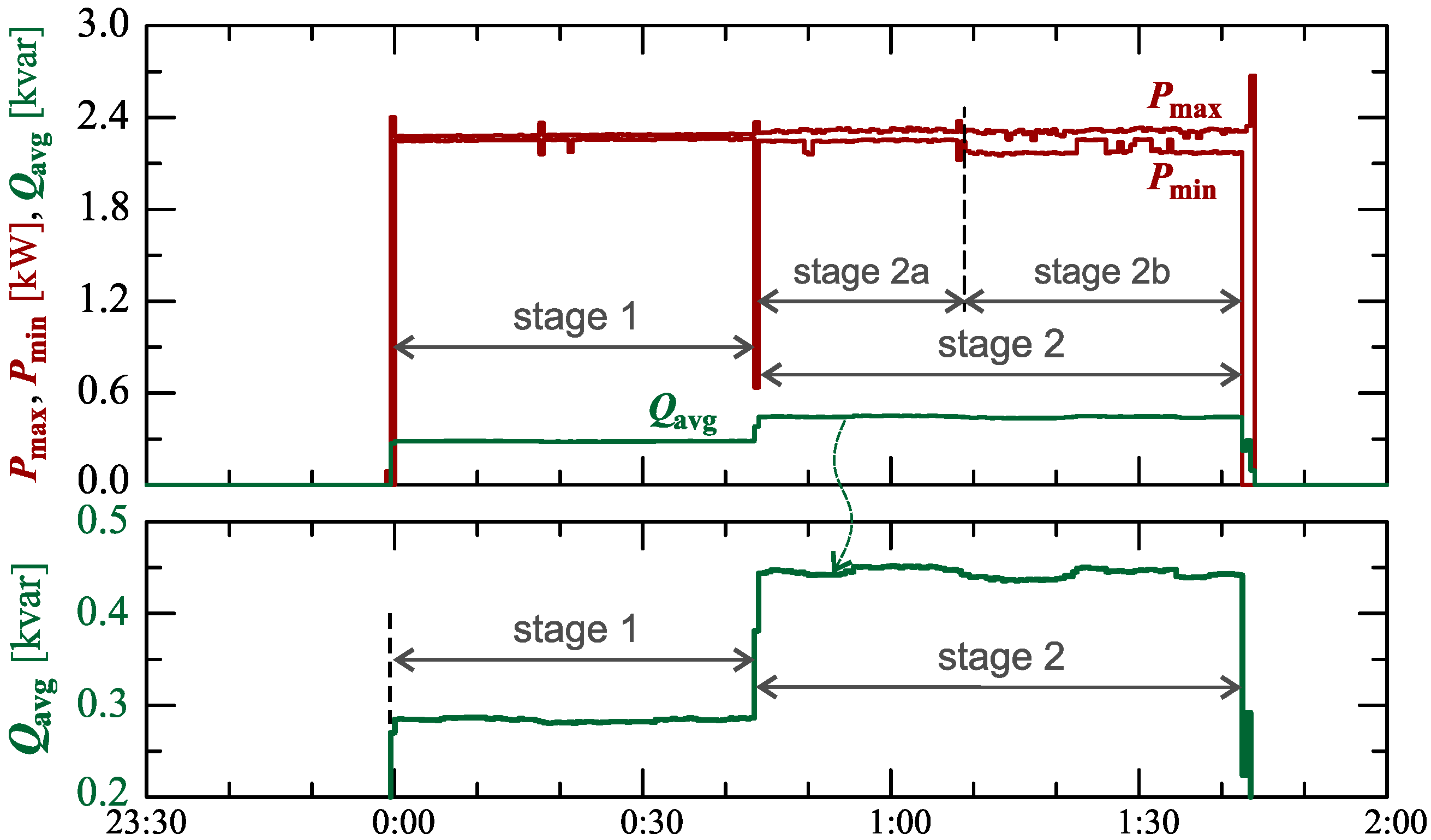
| I | 3.9 | 0.6 lead | 104 | 30 | Main charging phase consisting of 2 stages (2 sub-stages in stage 2) |
| II | 6.1 | 1.2 lead | 164 | 10 | Main charging phase consisting of 2 stages (2 sub-stages in stage 2) |
| III | 25.5 | 4.7 lead | 674 | 10 | Main charging phase consisting of 2 stages (2 sub-stages in stage 2) and additional charging phase consisting of 2 stages |
| IV | 33.7 | 6.8 lead | 884 | 20 | Main charging phase consisting of one stage and two additional phases consisting of two and one stage respectively |
| V | 36.7 | 6.8 lead | 982 | 10 | Main charging phase consisting of 3 stages (3 sub-stages in stage 2) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuwałek, P.; Wiczyński, G. Monitoring Single-Phase LV Charging of Electric Vehicles. Sensors 2023, 23, 141. https://doi.org/10.3390/s23010141
Kuwałek P, Wiczyński G. Monitoring Single-Phase LV Charging of Electric Vehicles. Sensors. 2023; 23(1):141. https://doi.org/10.3390/s23010141
Chicago/Turabian StyleKuwałek, Piotr, and Grzegorz Wiczyński. 2023. "Monitoring Single-Phase LV Charging of Electric Vehicles" Sensors 23, no. 1: 141. https://doi.org/10.3390/s23010141
APA StyleKuwałek, P., & Wiczyński, G. (2023). Monitoring Single-Phase LV Charging of Electric Vehicles. Sensors, 23(1), 141. https://doi.org/10.3390/s23010141