
Sensor-Driven Human-Robot Synergy: A Systems Engineering Approach



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Research Query #1—What could be a viable option in agricultural operations between the extremes of manual work and fully automated machine-based systems in agriculture?
- Research Query #2—How can the transition from conceptualization to the technology development of a human–robot synergy information sub-system in agriculture be realized?
2. Research Background
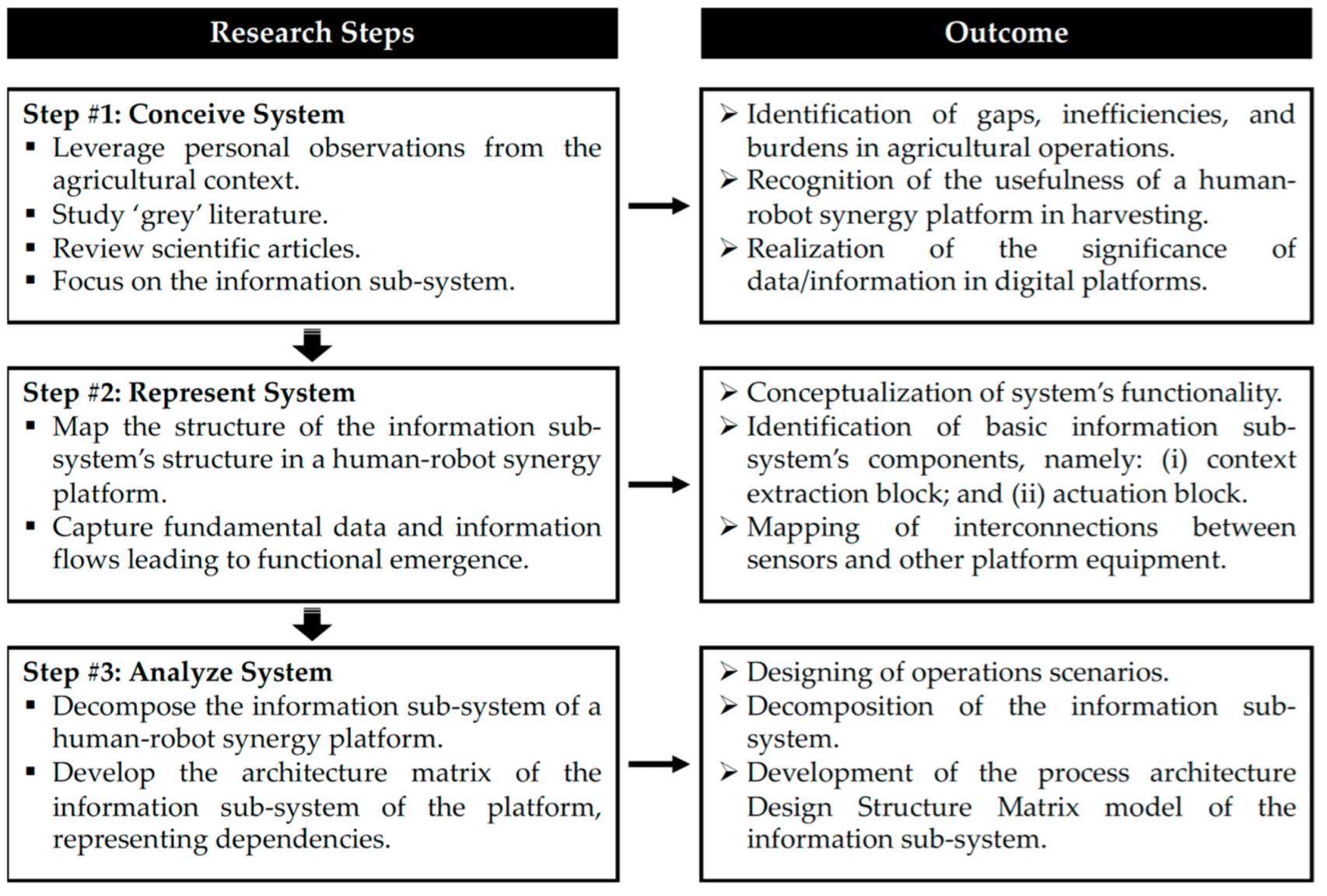
3. Materials and Methods
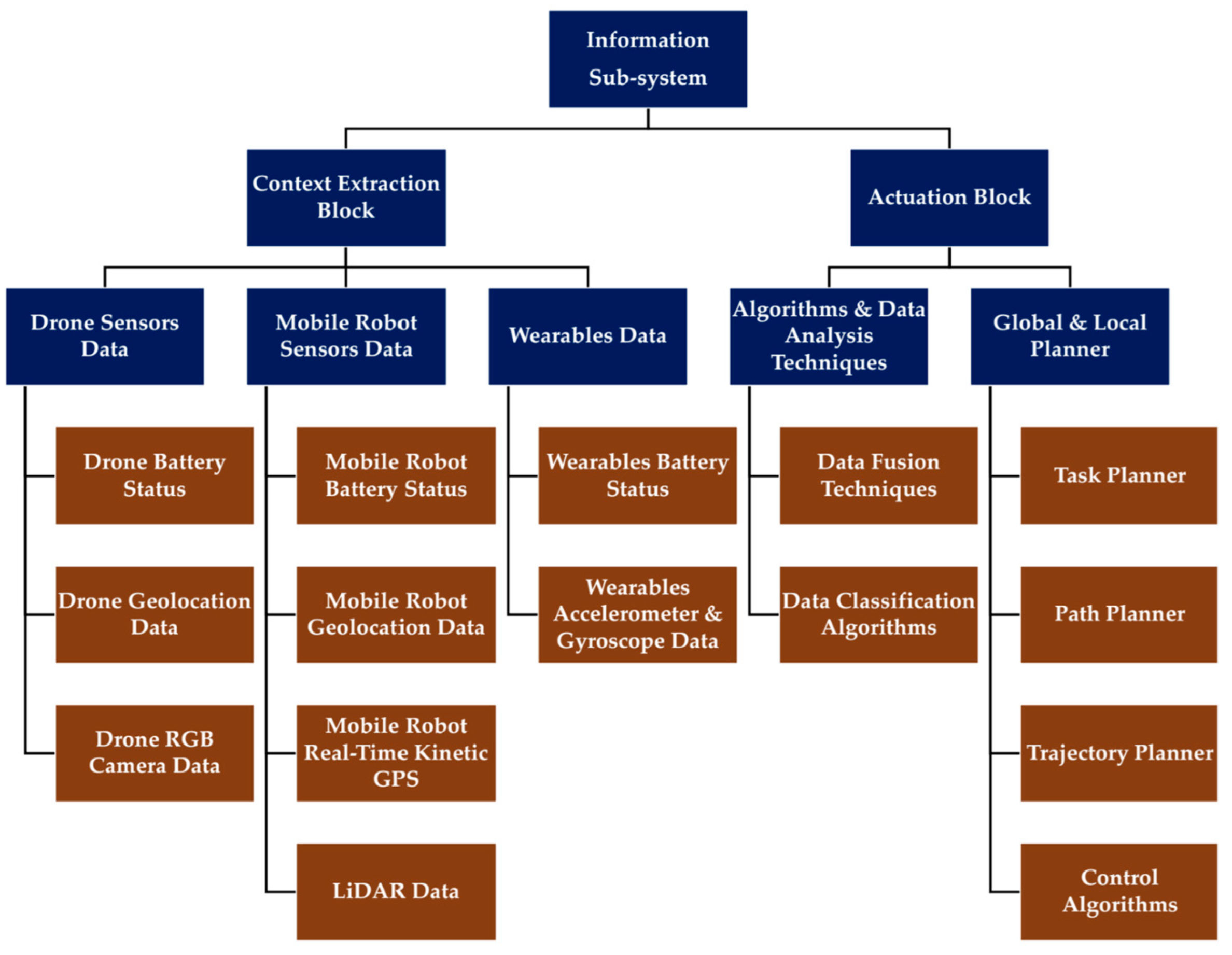
3.1. Human-Robot Synergy Platform—Information Sub-System Structure
3.1.1. Context Extraction Block
3.1.2. Actuation Block
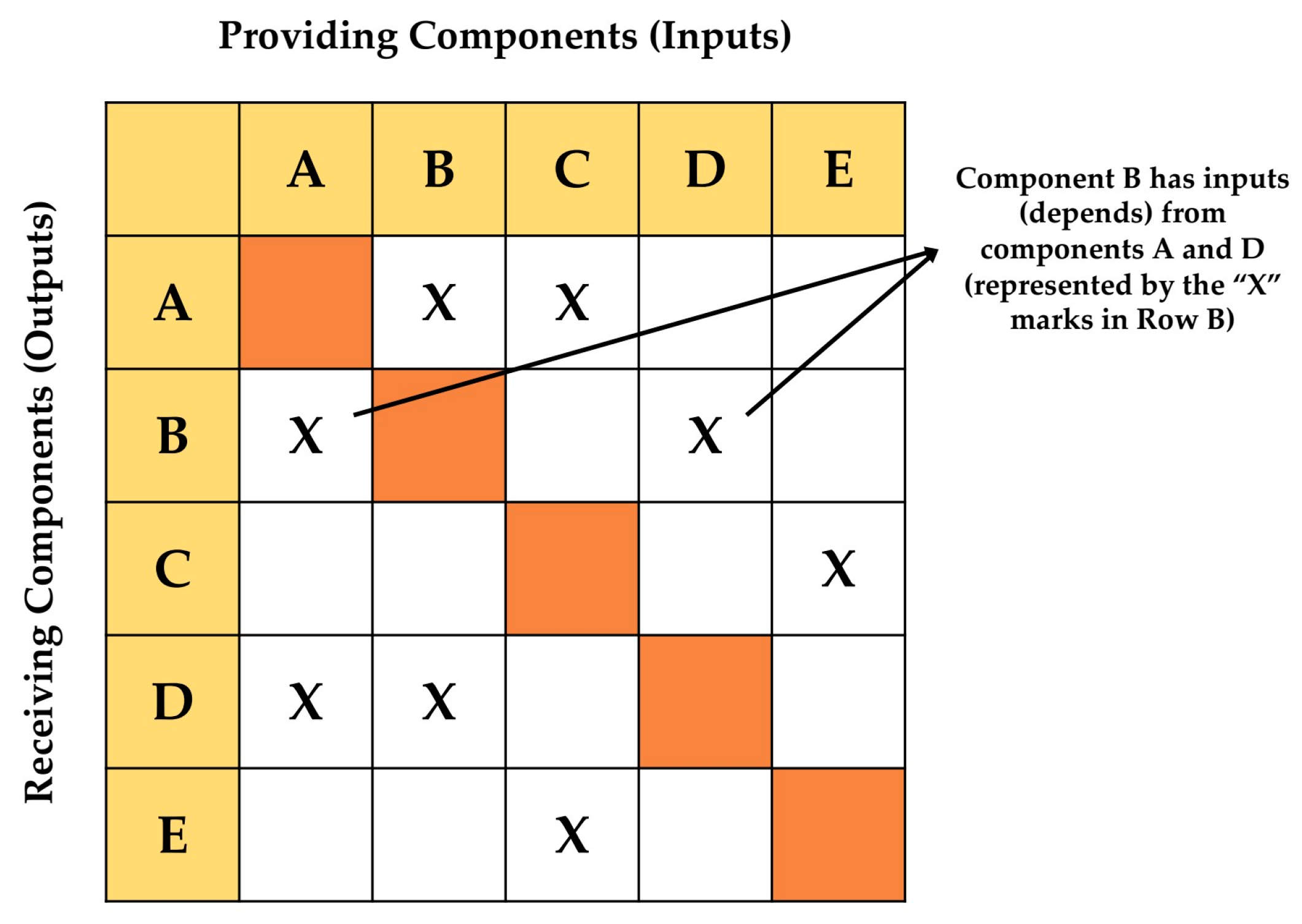
3.2. Systems Engineering Analysis
- Conciseness—The DSM’s structured arrangement of elements and their interactions in an N × N array offers a compact representation of a complex system.
- Visualization—The DSM allows a designer to distinguish system modules or sub-systems of interest through congregating components and marking out regions of intense elements’ interactions, which in turn allow the indicative assignment of specific system components to a module to be deducted.
- Comprehension—The DSM is easy to review and facilitates the understanding of the hierarchy and complexity of a system.
- Analysis and Optimization Potential—The DSM allows power analyses and matrix mathematics to optimize a system’s structure, modularity, and other significant patterns.
4. Results
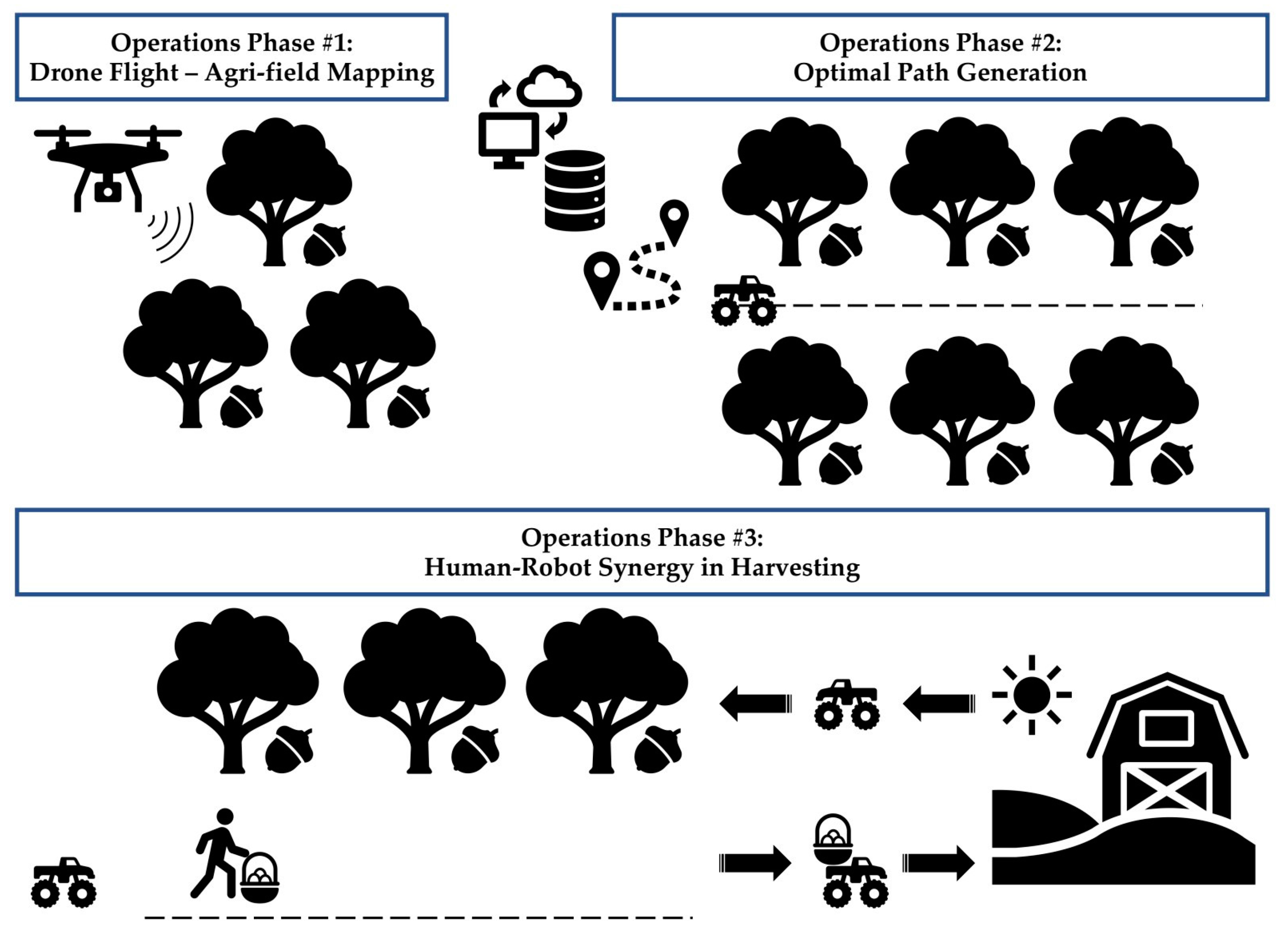
4.1. Operations Scenario and System’s Functionality
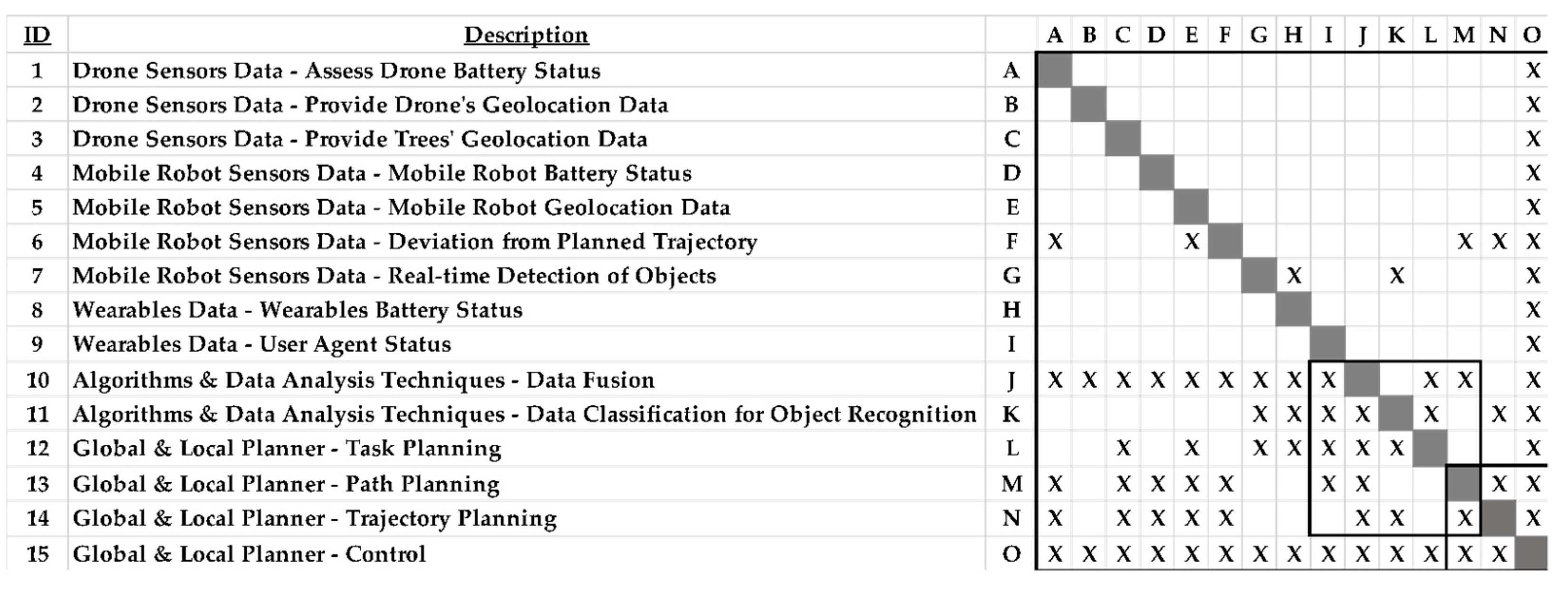
4.2. Information Sub-System’s Decomposition
- System tasks that can be executed in parallel.
- The sequence in which the system tasks have to be executed.
- System tasks, which have to be executed together due to any underlying dependencies.
4.3. Discussion
5. Conclusions
5.1. Academic Contributions
5.2. Practical Implications
5.3. Limitations
5.4. Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. Handbook on Agricultural Cost of Production Statistics: Guidelines for Data Collection, Compilation and Dissemination; Food and Agriculture Organization of the United Nations: Rome, Italy, 2016. [Google Scholar]
- Maucorps, A.; Münch, A.; Brkanovic, S.; Schuh, B.; Dwyer, J.; Vigani, M.; Khafagy, A.; Coto Sauras, M.; Deschellette, P.; Lopez, A.; et al. Research for AGRI Committee—The EU Farming Employment: Current Challenges and Future Prospects; European Parliament, Policy Department for Structural and Cohesion Policies: Brussels, Belgium, 2019. [Google Scholar]
- Giannakis, E.; Bruggeman, A. Exploring the labour productivity of agricultural systems across European regions: A multilevel approach. Land Use Policy 2018, 77, 94–106. [Google Scholar] [CrossRef]
- Gollin, D.; Lagakos, D.; Waugh, M.E. The agricultural productivity gap. Q. J. Econ. 2014, 129, 939–994. [Google Scholar] [CrossRef]
- Hashem, N.M.; Hassanein, E.M.; Hocquette, J.-F.; Gonzalez-Bulnes, A.; Ahmed, F.A.; Attia, Y.A.; Asiry, K.A. Agro-livestock farming system sustainability during the COVID-19 era: A cross-sectional study on the role of information and communication technologies. Sustainability 2021, 13, 6521. [Google Scholar] [CrossRef]
- Lezoche, M.; Panetto, H.; Kacprzyk, J.; Hernandez, J.E.; Alemany Díaz, M.M.E. Agri-food 4.0: A survey of the supply chains and technologies for the future agriculture. Comput. Ind. 2020, 117, 103187. [Google Scholar]
- Vougioukas, S.G. Agricultural robotics. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 365–392. [Google Scholar] [CrossRef]
- Aivazidou, E.; Tsolakis, N. Transitioning towards human–robot synergy in agriculture: A systems thinking perspective. Syst. Res. Behav. Sci. 2022, in press. [Google Scholar] [CrossRef]
- Na, A.; Isaac, W. Developing a human-centric agricultural model in the IoT environment. In Proceedings of the IEEE 2016 International Conference on Internet of Things and Applications (IOTA), Pune, India, 22–24 January 2016; pp. 292–297. [Google Scholar]
- Meier, S.R. Best project management and systems engineering practices in the preacquisition phase for federal intelligence and defense agencies. Proj. Manag. J. 2008, 39, 59–71. [Google Scholar] [CrossRef]
- Suh, E.S.; Furst, M.R.; Mihalyov, K.J.; De Weck, O. Technology infusion for complex systems: A framework and case study. Syst. Eng. 2010, 13, 186–203. [Google Scholar] [CrossRef]
- Kang, S.W.; Tucker, C. An automated approach to quantifying functional interactions by mining large-scale product specification data. J. Eng. Des. 2016, 27, 1–24. [Google Scholar] [CrossRef]
- Umeda, Y.; Kondoh, S.; Shimomura, Y.; Tomiyama, T. Development of design methodology for upgradable products based on function–behavior–state modeling. AI Edam 2005, 19, 161–182. [Google Scholar] [CrossRef] [Green Version]
- Lewis, K. Making sense of elegant complexity in design. J. Mech. Des. 2012, 134, 120801. [Google Scholar] [CrossRef]
- Jose, A.; Tollenaere, M. Modular and platform methods for product family design: Literature analysis. J. Intell. Manuf. 2005, 16, 371–390. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Kantor, G.A.; Auat Cheein, F.A. Human–robot interaction in agriculture: A survey and current challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Li, J.; Tao, J.; Ding, L.; Gao, H.; Deng, Z.; Luo, Y.; Li, Z. Human robot interaction for manipulation tasks based on stroke gesture recognition. Ind. Robot 2017, 44, 700–710. [Google Scholar] [CrossRef]
- Zacharaki, A.; Kostavelis, I.; Gasteratos, A.; Dokas, I. Safety bounds in human robot interaction: A survey. Saf. Sci. 2020, 127, 104667. [Google Scholar] [CrossRef]
- Bechtsis, D.; Tsolakis, N.; Iakovou, E.; Vlachos, D. Data-driven secure, resilient and sustainable supply chains: Gaps, opportunities, and a new generalised data sharing and data monetisation framework. Int. J. Prod. Res. 2022, 60, 4397–4417. [Google Scholar] [CrossRef]
- Steward, D.V. The design structure system: A method for managing the design of complex systems. IEEE Trans. Eng. Manag. 1981, 28, 71–74. [Google Scholar] [CrossRef]
- Tekinerdogan, B.; Verdouw, C. Systems architecture design pattern catalog for developing digital twins. Sensors 2020, 20, 5103. [Google Scholar] [CrossRef]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised human detection with an embedded vision system on a fully autonomous UAV for search and rescue operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef] [Green Version]
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile robotics in agricultural operations: A narrative review on planning aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Bochtis, D.; Griepentrog, H.W.; Vougioukas, S.; Busato, P.; Berruto, R.; Zhou, K. Route planning for orchard operations. Comput. Electron. Agr. 2015, 113, 51–60. [Google Scholar] [CrossRef]
- Anagnostis, A.; Tagarakis, A.C.; Kateris, D.; Moysiadis, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Orchard mapping with deep learning semantic segmentation. Sensors 2021, 21, 3813. [Google Scholar] [CrossRef] [PubMed]
- Katikaridis, D.; Moysiadis, V.; Tsolakis, N.; Busato, P.; Kateris, D.; Pearson, S.; Sørensen, C.G.; Bochtis, D. UAV-supported route planning for UGVs in semi-deterministic agricultural environments. Agronomy 2022, 12, 1937. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Filippou, E.; Kalaitzidis, D.; Benos, L.; Busato, P.; Bochtis, D. Proposing UGV and UAV systems for 3D mapping of orchard environments. Sensors 2022, 22, 1571. [Google Scholar] [CrossRef] [PubMed]
- Peng, C.; Fei, Z.; Vougioukas, S.G. Depth camera based row-end detection and headland manuvering in orchard navigation without GNSS. In Proceedings of the IEEE 30th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 28 June–1 July 2022; pp. 538–544. [Google Scholar]
- Nahavandi, S. Industry 5.0—A human-centric solution. Sustainability 2019, 11, 4371. [Google Scholar] [CrossRef] [Green Version]
- Oudah, M.; Al-Naji, A.; Chahl, J. Hand gesture recognition based on computer vision: A review of techniques. J. Imaging 2020, 6, 73. [Google Scholar] [CrossRef]
- Sharkawy, A.-N.; Koustoumpardis, P.N. Human–robot interaction: A review and analysis on variable admittance control, safety, and perspectives. Machines 2022, 10, 591. [Google Scholar] [CrossRef]
- Charalampous, K.; Kostavelis, I.; Gasteratos, A. Thorough robot navigation based on SVM local planning. Rob. Auton. Syst. 2015, 70, 166–180. [Google Scholar] [CrossRef]
- Charalampous, K.; Kostavelis, I.; Gasteratos, A. Recent trends in social aware robot navigation: A survey. Rob. Auton. Syst. 2017, 93, 85–104. [Google Scholar] [CrossRef]
- Moysiadis, V.; Katikaridis, D.; Benos, L.; Busato, P.; Anagnostis, A.; Kateris, D.; Pearson, S.; Bochtis, D. An integrated real-time hand gesture recognition framework for human-robot interaction in agriculture. Appl. Sci. 2022, 12, 8160. [Google Scholar] [CrossRef]
- Santavas, N.; Kansizoglou, I.; Bampis, L.; Karakasis, E.; Gasteratos, A. Attention! A lightweight 2D hand pose estimation approach. IEEE Sens. J. 2021, 21, 11488–11496. [Google Scholar] [CrossRef]
- Tsolakis, N.; Bechtsis, D.; Srai, J.S. Intelligent autonomous vehicles in digital supply chains: From conceptualisation, to simulation modelling, to real-world operations. Bus. Process Manag. J. 2019, 25, 414–437. [Google Scholar] [CrossRef]
- Sagasti, F.R.; Mitroff, I.I. Operations research from the viewpoint of general systems theory. Omega 1973, 1, 695–709. [Google Scholar] [CrossRef]
- Eppinger, S.D.; Browning, T.R. Design Structure Matrix Methods and Applications; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Nomaguchi, Y.; Saito, M.; Fujita, K. Multi-domain DSM method for design process management of complex system. J. Ind. Prod. Eng. 2015, 32, 465–472. [Google Scholar] [CrossRef]
- Benos, L.; Bechar, A.; Bochtis, D. Safety and ergonomics in human-robot interactive agricultural operations. Biosyst. Eng. 2020, 200, 55–72. [Google Scholar] [CrossRef]
- Kostavelis, I.; Gasteratos, A. Semantic mapping for mobile robotics tasks: A survey. Robot. Auton. Syst. 2015, 66, 86–103. [Google Scholar] [CrossRef]
- Tsolakis, N.; Bechtsis, D.; Bochtis, D. AgROS: A robot operating system based emulation tool for agricultural robotics. Agronomy 2019, 9, 403. [Google Scholar] [CrossRef] [Green Version]
- Glowinski, S.; Krzyzynski, T.; Bryndal, A.; Maciejewski, I. A kinematic model of a humanoid lower limb exoskeleton with hydraulic actuators. Sensors 2020, 20, 6116. [Google Scholar] [CrossRef]
- Eppinger, S.D.; Whitney, D.E.; Smith, R.P.; Gebala, D.A. A model-based method for organizing tasks in product development. Res. Eng. Des. 1994, 6, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Tsolakis, N.K.; Keramydas, C.A.; Toka, A.K.; Aidonis, D.A.; Iakovou, E.T. Agrifood supply chain management: A comprehensive hierarchical decision-making framework and a critical taxonomy. Biosyst. Eng. 2014, 120, 47–64. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsolakis, N.; Gasteratos, A. Sensor-Driven Human-Robot Synergy: A Systems Engineering Approach. Sensors 2023, 23, 21. https://doi.org/10.3390/s23010021
Tsolakis N, Gasteratos A. Sensor-Driven Human-Robot Synergy: A Systems Engineering Approach. Sensors. 2023; 23(1):21. https://doi.org/10.3390/s23010021
Chicago/Turabian StyleTsolakis, Naoum, and Antonios Gasteratos. 2023. "Sensor-Driven Human-Robot Synergy: A Systems Engineering Approach" Sensors 23, no. 1: 21. https://doi.org/10.3390/s23010021
APA StyleTsolakis, N., & Gasteratos, A. (2023). Sensor-Driven Human-Robot Synergy: A Systems Engineering Approach. Sensors, 23(1), 21. https://doi.org/10.3390/s23010021