
Validity of Spatio-Temporal Gait Parameters in Healthy Young Adults Using a Motion-Sensor-Based Gait Analysis System (ORPHE ANALYTICS) during Walking and Running
 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Procedure
2.3. Data Processing
2.4. Statistical Analysis
3. Results
3.1. Gait-cycle Detection Ratio in ORPHE ANALYTICS
3.2. Gait-cycle Percentages, including Outliers
3.3. Relative Validity of ORPHE ANALYTICS against Optical Motion Capture
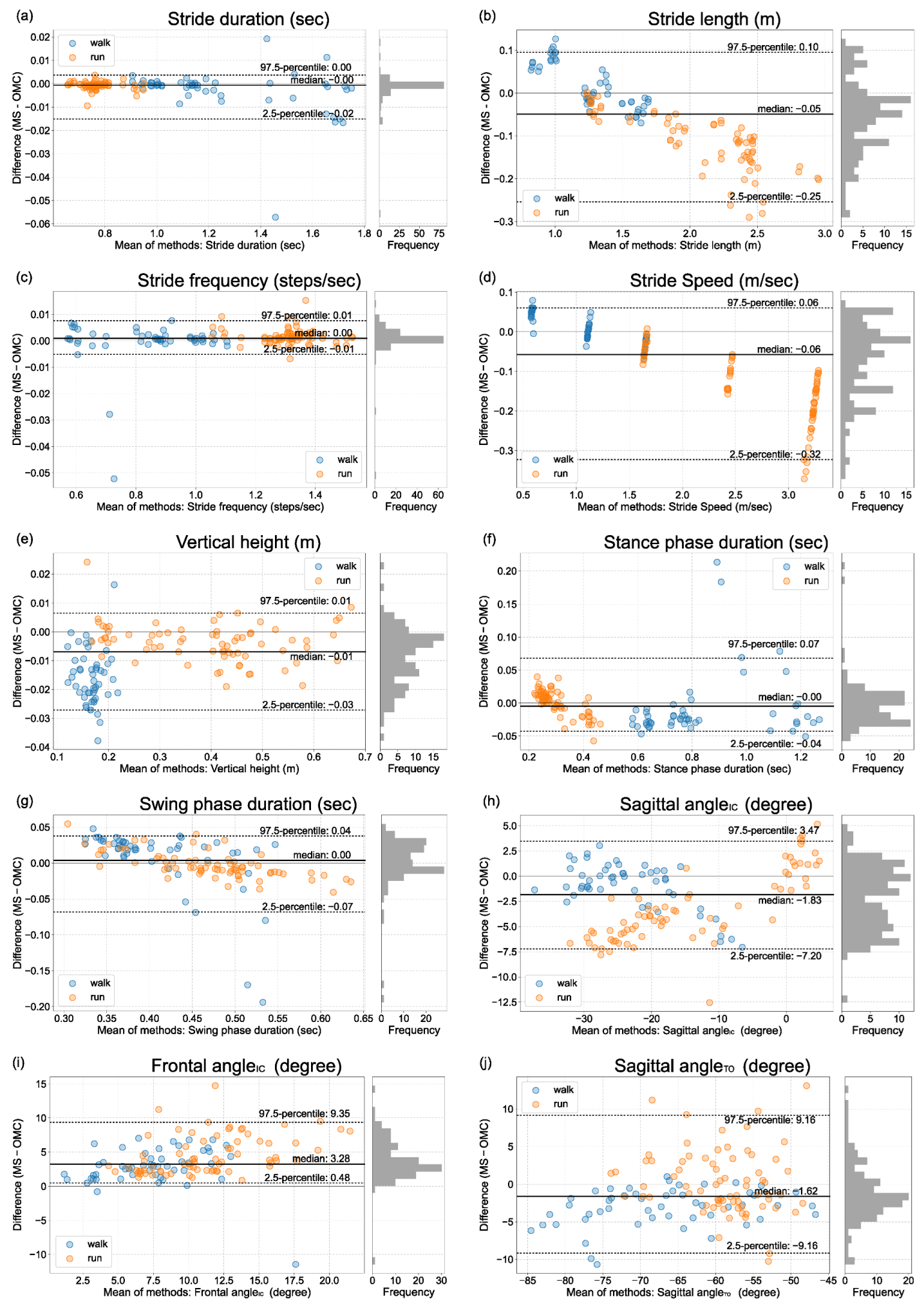
3.4. Absolute Difference between ORPHE ANALYTICS and Optical Motion Capture
4. Discussion
4.1. Differences between Plantar-Embedded and Instep-Mounted Motion Sensors
4.2. Less Agreement in Sagittal AngleTO, Swing Phase Duration, and Stance Phase Duration
4.3. The Proportional Errors in Stride Speed and Stride Length
4.4. Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kobsar, D.; Charlton, J.M.; Tse, C.T.F.; Esculier, J.-F.; Graffos, A.; Krowchuk, N.M.; Thatcher, D.; Hunt, M.A. Validity and Reliability of Wearable Inertial Sensors in Healthy Adult Walking: A Systematic Review and Meta-Analysis. J. Neuroeng. Rehabil. 2020, 17, 62. [Google Scholar] [CrossRef]
- Simon, S.R. Quantification of Human Motion: Gait Analysis-Benefits and Limitations to Its Application to Clinical Problems. J. Biomech. 2004, 37, 1869–1880. [Google Scholar] [CrossRef]
- Benson, L.C.; Clermont, C.A.; Bošnjak, E.; Ferber, R. The Use of Wearable Devices for Walking and Running Gait Analysis Outside of the Lab: A Systematic Review. Gait Posture 2018, 63, 124–138. [Google Scholar] [CrossRef]
- Fukushi, K.; Huang, C.; Wang, Z.; Kajitani, H.; Nihey, F.; Nakahara, K. On-Line Algorithms of Stride-Parameter Estimation for in-Shoe Motion-Sensor System. IEEE Sens. J. 2022, 22, 9636–9648. [Google Scholar] [CrossRef]
- Carroll, K.; Kennedy, R.A.; Koutoulas, V.; Bui, M.; Kraan, C.M. Validation of Shoe-Worn Gait Up Physilog®5 Wearable Inertial Sensors in Adolescents. Gait Posture 2022, 91, 19–25. [Google Scholar] [CrossRef]
- Morris, R.; Stuart, S.; McBarron, G.; Fino, P.C.; Mancini, M.; Curtze, C. Validity of Mobility Lab (Version 2) for Gait Assessment in Young Adults, Older Adults and Parkinson’s Disease. Physiol. Meas. 2019, 40, 095003. [Google Scholar] [CrossRef]
- García-Pinillos, F.; Roche-Seruendo, L.E.; Marcén-Cinca, N.; Marco-Contreras, L.A.; Latorre-Román, P.A. Absolute Reliability and Concurrent Validity of the Stryd System for the Assessment of Running Stride Kinematics at Different Velocities. J. Strength Cond. Res. 2021, 35, 78–84. [Google Scholar] [CrossRef]
- Whittle, M.W. Clinical Gait Analysis: A Review. Hum. Mov. Sci. 1996, 15, 369–387. [Google Scholar] [CrossRef]
- Zhou, L.; Fischer, E.; Tunca, C.; Brahms, C.M.; Ersoy, C.; Granacher, U.; Arnrich, B. How We Found Our IMU: Guidelines to IMU Selection and a Comparison of Seven IMUs for Pervasive Healthcare Applications. Sensors 2020, 20, 4090. [Google Scholar] [CrossRef]
- Rudisch, J.; Jöllenbeck, T.; Vogt, L.; Cordes, T.; Klotzbier, T.J.; Vogel, O.; Wollesen, B. Agreement and Consistency of Five Different Clinical Gait Analysis Systems in the Assessment of Spatiotemporal Gait Parameters. Gait Posture 2021, 85, 55–64. [Google Scholar] [CrossRef]
- Pacini Panebianco, G.; Bisi, M.C.; Stagni, R.; Fantozzi, S. Analysis of the Performance of 17 Algorithms from a Systematic Review: Influence of Sensor Position, Analysed Variable and Computational Approach in Gait Timing Estimation from IMU Measurements. Gait Posture 2018, 66, 76–82. [Google Scholar] [CrossRef]
- Zrenner, M.; Küderle, A.; Roth, N.; Jensen, U.; Dümler, B.; Eskofier, B.M. Does the Position of Foot-Mounted IMU Sensors Influence the Accuracy of Spatio-Temporal Parameters in Endurance Running? Sensors 2020, 20, 5705. [Google Scholar] [CrossRef]
- Benson, L.; Clermont, C.; Watari, R.; Exley, T.; Ferber, R. Automated Accelerometer-Based Gait Event Detection During Multiple Running Conditions. Sensors 2019, 19, 1483. [Google Scholar] [CrossRef] [Green Version]
- Alvim, F.; Cerqueira, L.; Netto, A.D.A.; Leite, G.; Muniz, A. Comparison of Five Kinematic-Based Identification Methods of Foot Contact Events during Treadmill Walking and Running at Different Speeds. J. Appl. Biomech. 2015, 31, 383–388. [Google Scholar] [CrossRef]
- Stolze, H.; Kuhtz-Buschbeck, J.P.; Mondwurf, C.; Boczek-Funcke, A.; Jöhnk, K.; Deuschl, G.; Illert, M. Gait Analysis during Treadmill and Overground Locomotion in Children and Adults. Electroencephalogr. Clin. Neurophysiol. Electromyogr. Mot. Control. 1997, 105, 490–497. [Google Scholar] [CrossRef]
- Perry, J. Gait Analysis: Normal and Pathological Function, 2nd ed.; Raven Press: New York, NY, USA, 2010. [Google Scholar]
- Koo, T.K.; Li, M.Y. A Guideline of Selecting and Reporting Intraclass Correlation Coefficients for Reliability Research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef] [Green Version]
- Bland, J.M.; Altman, D.G. Statistical Methods for Assessing Agreement between Two Methods of Clinical Measurement. Lancet 1986, 1, 307–310. [Google Scholar] [CrossRef]
- Brauers, L.; Smeets, R.; Feys, P.; Bastiaenen, C.; Klingels, K.; Rameckers, E. Test-Retest Reliability of Static and Dynamic Motor Fatigability Protocols Using Grip and Pinch Strength in Typically Developing Children. Eur. J. Pediatr. 2021, 180, 2505–2512. [Google Scholar] [CrossRef]
- Zou, G.Y. Sample Size Formulas for Estimating Intraclass Correlation Coefficients with Precision and Assurance. Stat. Med. 2012, 31, 3972–3981. [Google Scholar] [CrossRef]
- Horsley, B.J.; Tofari, P.J.; Halson, S.L.; Kemp, J.G.; Dickson, J.; Maniar, N.; Cormack, S.J. Does Site Matter? Impact of Inertial Measurement Unit Placement on the Validity and Reliability of Stride Variables During Running: A Systematic Review and Meta-Analysis. Sport. Med. 2021, 51, 1449–1489. [Google Scholar] [CrossRef]
- Küderle, A.; Roth, N.; Zlatanovic, J.; Zrenner, M.; Eskofier, B.; Kluge, F. The Placement of Foot-Mounted IMU Sensors Does Affect the Accuracy of Spatial Parameters during Regular Walking. PLoS ONE 2022, 17, e0269567. [Google Scholar] [CrossRef] [PubMed]
- Washabaugh, E.P.; Kalyanaraman, T.; Adamczyk, P.G.; Claflin, E.S.; Krishnan, C. Validity and Repeatability of Inertial Measurement Units for Measuring Gait Parameters. Gait Posture 2017, 55, 87–93. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mo, S.; Chow, D.H.K. Accuracy of Three Methods in Gait Event Detection during Overground Running. Gait Posture 2018, 59, 93–98. [Google Scholar] [CrossRef] [PubMed]
- Hamacher, D.; Hamacher, D.; Müller, R.; Schega, L.; Zech, A. Exploring Phase Dependent Functional Gait Variability. Hum. Mov. Sci. 2017, 52, 191–196. [Google Scholar] [CrossRef]
- Falbriard, M.; Soltani, A.; Aminian, K. Running Speed Estimation Using Shoe-Worn Inertial Sensors: Direct Integration, Linear, and Personalized Model. Front Sports Act. Living 2021, 3, 585809. [Google Scholar] [CrossRef]
- Bailey, G.P.; Harle, R. Assessment of Foot Kinematics During Steady State Running Using a Foot-Mounted IMU. Procedia Eng. 2014, 72, 32–37. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Unit | Explanation | Definition of Motion Capture Data Analysis | Name in ORPHE ANALYTICS * |
|---|---|---|---|---|
| Stride duration | sec | A time required for one gait cycle | A time required for IC to next IC | Stride duration |
| Stride length | m | Anteroposterior displacement of the foot during one gait cycle | Difference between the anteroposterior position of the motion sensor center at IC and next IC + (stride duration) × (treadmill speed) | Stride length |
| Stride frequency | steps/ sec | Number of gait cycles per 1 second | The inverse of stride duration | Stride frequency |
| Stride speed | m/sec | Average speed of the foot during one gait cycle | Stride length/stride duration | Stride speed |
| Vertical height | m | Maximum height of foot during one gait cycle | Maximum height of the center of motion sensor during one gait cycle | Vertical height |
| Stance phase duration | sec | A time that the foot is in contact with the ground during one gait cycle | Time required for IC to next TO | Ground contact time |
| Swing phase duration | sec | A time that the foot is in the air during one gait cycle | Time required for TO to next IC | Swing time |
| Sagittal angleIC | degree | The angle between ground and foot in the sagittal plane at IC | The angle between the motion sensor’s anteroposterior axis and its projection vector to the horizontal plane at IC | Strike angle |
| Frontal angleIC | degree | The angle between ground and foot in the frontal plane at IC | The angle between the motion sensor’s mediolateral axis and its projection vector to the horizontal plane at IC | Pronation |
| Sagittal angleTO | degree | The angle between ground and foot in the sagittal plane at TO | The angle between the motion sensor’s anteroposterior axis and its projection vector to the horizontal plane at TO | Toe off angle |
| Condition | Overall | Walking | Running | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Position | Plantar-Embedded | Instep-Mounted | Plantar-Embedded | Instep-Mounted | Plantar-Embedded | Instep-Mounted | ||||||
| Parameter | ICC(2,1) | 95%CI | ICC(2,1) | 95%CI | ICC(2,1) | 95%CI | ICC(2,1) | 95%CI | ICC(2,1) | 95%CI | ICC(2,1) | 95%CI |
| Stride length | 0.983 | (0.949, 0.992) | 0.963 | (0.794, 0.986) | 0.980 | (0.964, 0.989) | 0.971 | (0.950, 0.983) | 0.927 | (0.000, 0.984) | 0.855 | (−0.022, 0.968) |
| Stride duration | 1.000 | (1.000, 1.000) | 1.000 | (1.000, 1.000) | 0.999 | (0.999, 1.000) | 1.000 | (0.999, 1.000) | 1.000 | (0.999, 1.000) | 1.000 | (1.000, 1.000) |
| Stride frequency | 1.000 | (1.000, 1.000) | 1.000 | (1.000, 1.000) | 0.999 | (0.998, 0.999) | 0.999 | (0.998, 0.999) | 1.000 | (0.998, 1.000) | 1.000 | (0.999, 1.000) |
| Stride speed | 0.991 | (0.962, 0.996) | 0.979 | (0.848, 0.993) | 0.996 | (0.993, 0.998) | 0.993 | (0.987, 0.996) | 0.932 | (0.001, 0.986) | 0.855 | (−0.022, 0.969) |
| Vertical height | 0.996 | (0.979, 0.999) | 0.963 | (0.376, 0.990) | 0.750 | (−0.060, 0.926) | 0.572 | (−0.019, 0.816) | 0.998 | (0.991, 0.999) | 0.885 | (−0.014, 0.976) |
| Stance phase duration | 0.993 | (0.991, 0.995) | 0.993 | (0.991, 0.995) | 0.974 | (0.955, 0.985) | 0.975 | (0.958, 0.986) | 0.920 | (0.792, 0.965) | 0.917 | (0.834, 0.959) |
| Swing phase duration | 0.907 | (0.870, 0.934) | 0.904 | (0.867, 0.931) | 0.766 | (0.625, 0.859) | 0.764 | (0.626, 0.856) | 0.976 | (0.924, 0.990) | 0.976 | (0.949, 0.988) |
| Sagittal angleIC | 0.939 | (0.820, 0.972) | 0.945 | (0.895, 0.968) | 0.947 | (0.896, 0.971) | 0.926 | (0.874, 0.957) | 0.897 | (0.422, 0.967) | 0.913 | (0.676, 0.967) |
| Frontal angleIC | 0.566 | (−0.064, 0.817) | 0.627 | (0.474, 0.736) | 0.541 | (0.010, 0.786) | 0.607 | (0.407, 0.751) | 0.475 | (−0.098, 0.801) | 0.507 | (0.044, 0.761) |
| Sagittal angleTO | 0.892 | (0.843, 0.925) | 0.833 | (0.752, 0.885) | 0.922 | (0.333, 0.977) | 0.921 | (0.439, 0.975) | 0.715 | (0.480, 0.854) | 0.577 | (0.294, 0.768) |
| Condition | Overall | Walking | Running | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Position | Plantar-Embedded | Instep-Mounted | Plantar- Embedded | Instep-Mounted | Plantar-Embedded | Instep-Mounted | ||||||
| Parameter | Median [95-percentile Range] | IQR% | Median [95-percentile Range] | IQR% | Median [95-Percentile Range] | IQR% | Median [95-Percentile Range] | IQR% | Median [95-Percentile Range] | IQR% | Median [95-Percentile Range] | IQR% |
| Stride length (m) | −0.049 [−0.254, 0.095] | 6.3 | −0.082 [−0.356, 0.097] | 9.5 | −0.003 [−0.057, 0.107] | 6.9 | −0.018 [−0.093, 0.108] | 9.6 | −0.110 [−0.266, −0.007] | 4.5 | −0.170 [−0.364, −0.055] | 4.9 |
| Stride duration (s) | −0.001 [−0.015, 0.004] | 0.2 | −0.001 [−0.012, 0.006] | 0.2 | −0.001 [−0.017, 0.009] | 0.3 | −0.001 [−0.019, 0.009] | 0.4 | −0.001 [−0.005, 0.002] | 0.1 | −0.001 [−0.004, 0.005] | 0.1 |
| Stride frequency (steps/s) | 0.001 [−0.005, 0.008] | 0.2 | 0.001 [−0.007, 0.006] | 0.2 | 0.001 [−0.022, 0.007] | 0.3 | 0.002 [−0.019, 0.007] | 0.4 | 0.001 [−0.003, 0.009] | 0.2 | 0.001 [−0.007, 0.005] | 0.1 |
| Stride speed (m/s) | −0.057 [−0.323, 0.060] | 8.3 | −0.098 [−0.450, 0.061] | 13.4 | −0.001 [−0.059, 0.061] | 5.5 | −0.012 [−0.092, 0.066] | 8.1 | −0.143 [−0.335, −0.006] | 4.2 | −0.235 [−0.464, −0.069] | 5.0 |
| Vertical height (m) | −0.007 [−0.027, 0.006] | 6.1 | 0.029 [−0.001, 0.057] | 32.4 | −0.017 [−0.031, −0.001] | 6.2 | 0.007 [−0.002, 0.027] | 13.8 | −0.003 [−0.016, 0.007] | 1.7 | 0.041 [ 0.022, 0.060] | 6.1 |
| Stance phase duration (m) | −0.005 [−0.043, 0.068] | 8.8 | −0.007 [−0.050, 0.058] | 9.5 | −0.024 [−0.046, 0.157] | 2.6 | −0.025 [−0.048, 0.143] | 2.8 | 0.006 [−0.034, 0.031] | 7.2 | 0.003 [−0.048, 0.030] | 8.0 |
| Swing phase duration | 0.004 [−0.068, 0.038] | 7.6 | 0.007 [−0.065, 0.046] | 7.6 | 0.021 [−0.147, 0.037] | 4.8 | 0.022 [−0.127, 0.044] | 4.7 | −0.006 [−0.033, 0.034] | 4.1 | −0.004 [−0.033, 0.047] | 4.4 |
| Sagittal angleIC (degree) | −1.833 [−7.204, 3.469] | N/A | −1.088 [−7.075, 3.929] | N/A | −0.432 [−6.438, 2.171] | N/A | −0.085 [−6.894, 3.211] | N/A | −4.091 [−7.551, 3.830] | N/A | −2.276 [−7.142, 4.586] | N/A |
| Frontal angleIC (degree) | 3.281 [0.485, 9.351] | N/A | 0.854 [−3.425, 11.050] | N/A | 2.942 [−0.559, 6.801] | N/A | −0.668 [−4.775, 3.508] | N/A | 3.622 [1.328, 9.903] | N/A | 1.945 [−1.220, 11.428] | N/A |
| Sagittal angleTO (degree) | −1.616 [−9.160, 9.164] | −6.3 | −2.255 [−9.573, 11.604] | −8.8 | −2.825 [−9.388, 0.424] | −4.6 | −2.739 [−8.420, 1.328] | −5.1 | −0.294 [−7.589, 10.043] | −9.3 | −1.227 [−10.035, 14.424] | −12.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uno, Y.; Ogasawara, I.; Konda, S.; Yoshida, N.; Otsuka, N.; Kikukawa, Y.; Tsujii, A.; Nakata, K. Validity of Spatio-Temporal Gait Parameters in Healthy Young Adults Using a Motion-Sensor-Based Gait Analysis System (ORPHE ANALYTICS) during Walking and Running. Sensors 2023, 23, 331. https://doi.org/10.3390/s23010331
Uno Y, Ogasawara I, Konda S, Yoshida N, Otsuka N, Kikukawa Y, Tsujii A, Nakata K. Validity of Spatio-Temporal Gait Parameters in Healthy Young Adults Using a Motion-Sensor-Based Gait Analysis System (ORPHE ANALYTICS) during Walking and Running. Sensors. 2023; 23(1):331. https://doi.org/10.3390/s23010331
Chicago/Turabian StyleUno, Yuki, Issei Ogasawara, Shoji Konda, Natsuki Yoshida, Naoki Otsuka, Yuya Kikukawa, Akira Tsujii, and Ken Nakata. 2023. "Validity of Spatio-Temporal Gait Parameters in Healthy Young Adults Using a Motion-Sensor-Based Gait Analysis System (ORPHE ANALYTICS) during Walking and Running" Sensors 23, no. 1: 331. https://doi.org/10.3390/s23010331
APA StyleUno, Y., Ogasawara, I., Konda, S., Yoshida, N., Otsuka, N., Kikukawa, Y., Tsujii, A., & Nakata, K. (2023). Validity of Spatio-Temporal Gait Parameters in Healthy Young Adults Using a Motion-Sensor-Based Gait Analysis System (ORPHE ANALYTICS) during Walking and Running. Sensors, 23(1), 331. https://doi.org/10.3390/s23010331