
Mobile-BAT—A Novel Ultra-Low Power Wildlife Tracking System

 , , , and
, , , and
Abstract
:1. Introduction
2. State of the Art
3. System Concept
4. Logger Hardware
4.1. Transceiver
4.2. Microcontroller
4.3. Power Supply
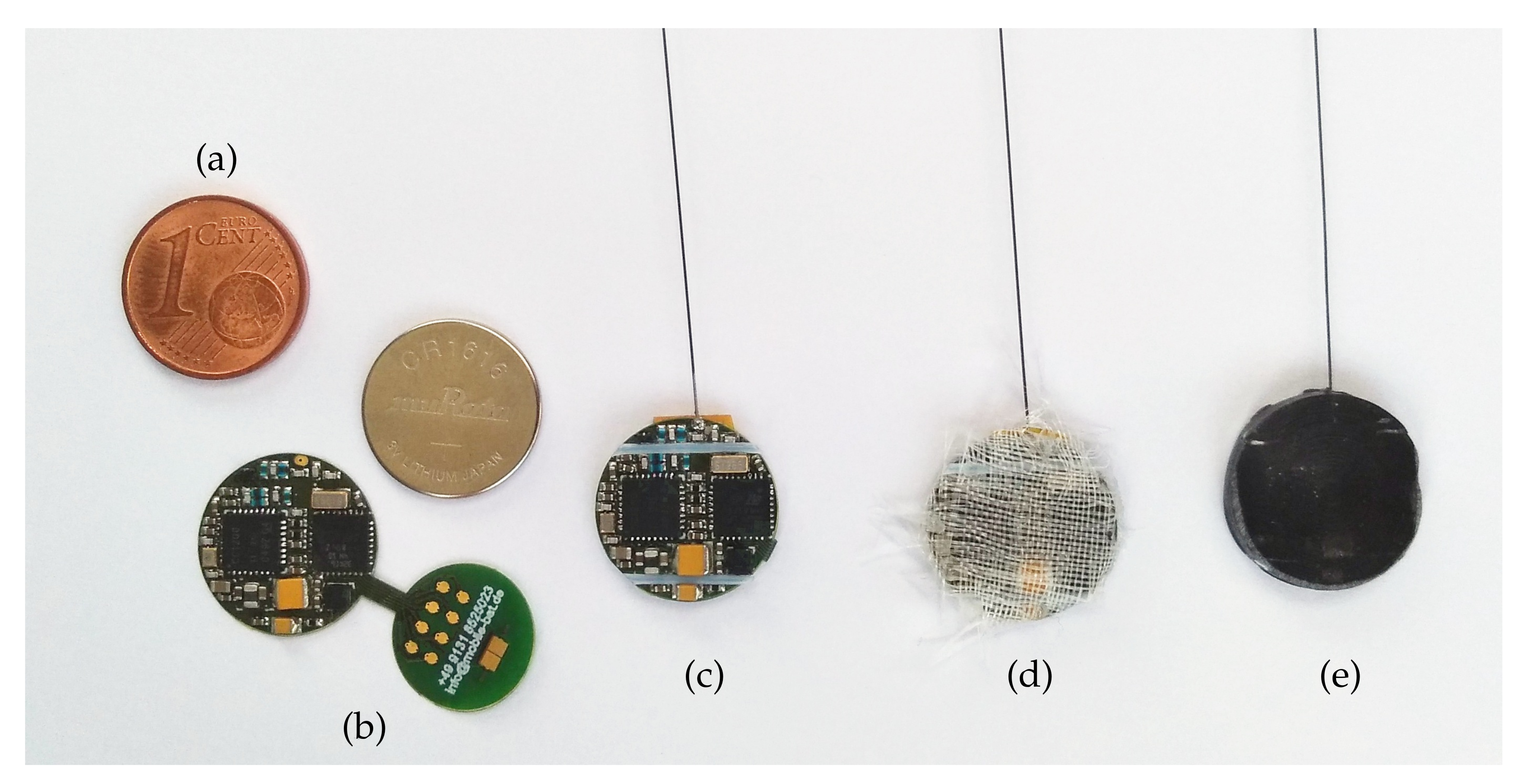
4.4. Mechanical Design
4.5. Energy Characterization
5. RF TRX System for Return Detection and Data Upload
6. Position Reconstruction
6.1. Propagation Simulation
6.2. Position Estimation
6.3. Accuracy
- Number of base stations: With only one base station acquired, the receiver is in a circular ring around that base station. The more base stations that are decoded, the smaller the most probable area becomes. However, faulty cells (e.g., wrong cells in the database) may lower the accuracy.
- Power levels: High receive power levels (e.g., −60 dBm…−40 dBm) occur in a small area around the respective cell. The area increases proportionally to the square of the distance.
- Height above ground: The actual height of the receiver is unknown. Therefore, our propagation simulations were done for typical flight heights of the bats (2 m, 6 m, 18 m, 40 m).
- Terrain: Mountains and valleys have a high influence on signal propagation. We included a digital elevation model in our propagation simulations, so shadowing effects reduce the covered area and, thus, contribute to higher accuracy.
7. System Validation
8. Discussion
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACC | accelerometer |
| AoA | angle of arrival |
| DFG | German Research Foundation |
| ECG | electrocardiography |
| FSK | frequency-shift keying |
| GIS | geographic information system |
| GMSK | Gaussian minimum-shift keying |
| GNSS | global navigation satellite system |
| GPRS | general packet radio service |
| GPS | global positioning system |
| GSM | global system for mobile communication |
| LNA | low-noise amplifier |
| LPWAN | low-power wide-area network |
| LTE | long-term evolution |
| MLS | Mozilla location service |
| PCB | printed circuit board |
| PTFE | polytetrafluoroethylene |
| QFN | quad flat no-leads package |
| RF | radio frequency |
| RTC | real-time clock |
| RX | receive |
| SOOP | signals of opportunity |
| TDoA | time difference of arrival |
| TRX | transmit and receive |
| TTFF | time to first fix |
| TX | transmit |
| VHF | very high frequency |
References
- Williams, H.J. Optimizing the use of biologgers for movement ecology research. J. Anim. Ecol. 2019, 89, 186–206. [Google Scholar] [CrossRef] [PubMed]
- Riotte-Lambert, L.; Matthiopoulos, J. Environmental Predictability as a Cause and Consequence of Animal Movement. Trends Ecol. Evol. 2020, 35, 163–174. [Google Scholar] [CrossRef] [PubMed]
- Tibbetts, J.H. Remote sensors bring wildlife tracking to new level. BioScience 2017, 67, 411–417. [Google Scholar] [CrossRef]
- Holland, R.; Wikelski, M. Studying the Migratory Behaviour of Individual Bats: Current Techniques and Future Directions. J. Mammal. 2009, 90, 1324–1329. [Google Scholar] [CrossRef]
- Ripperger, S.P.; Tschapka, M.; Kalko, E.K.; Rodriguez-Herrera, B.; Mayer, F. Life in a mosaic landscape: Anthropogenic habitat fragmentation affects genetic population structure in a frugivorous bat species. Conserv. Genet. 2013, 14, 925–934. [Google Scholar] [CrossRef]
- Torrenta, R.; Lacoste, F.; Villard, M.A. Loss and fragmentation of mature woodland reduce the habitat niche breadth of forest birds. Landsc. Ecol. 2018, 33, 1865–1879. [Google Scholar] [CrossRef]
- Frick, W.F.; Kingston, T.; Flanders, J. A review of the major threats and challenges to global bat conservation. Ann. N. Y. Acad. Sci. 2019, 1469, 5–25. [Google Scholar] [CrossRef]
- Browning, E.; Barlow, K.E.; Burns, F.; Hawkins, C.; Boughey, K. Drivers of European bat population change: A review reveals evidence gaps. Mammal Rev. 2021, 51, 353–368. [Google Scholar] [CrossRef]
- Voigt, C.C.; Scholl, J.M.; Bauer, J.; Teige, T.; Yovel, Y.; Kramer-Schadt, S.; Gras, P. Movement responses of common noctule bats to the illuminated urban landscape. Landsc. Ecol. 2019, 35, 189–201. [Google Scholar] [CrossRef]
- Casper, R.M. Guidelines for the instrumentation of wild birds and mammals. Anim. Behav. 2009, 78, 1477–1483. [Google Scholar] [CrossRef]
- Heim, O.; Lenski, J.; Schulze, J.; Jung, K.; Kramer-Schadt, S.; Eccard, J.A.; Voigt, C.C. The relevance of vegetation structures and small water bodies for bats foraging above farmland. Basic Appl. Ecol. 2018, 27, 9–19. [Google Scholar] [CrossRef]
- Verboom, B.; Huitema, H. The importance of linear landscape elements for the pipistrelle Pipistrellus pipistrellus and the serotine bat Eptesicus serotinus. Landsc. Ecol. 1997, 12, 117–125. [Google Scholar] [CrossRef]
- Aldridge, H.D.J.N.; Brigham, R.M. Load Carrying and Maneuverability in an Insectivorous Bat: A Test of The 5% “Rule” of Radio-Telemetry. J. Mammal. 1988, 69, 379–382. [Google Scholar] [CrossRef]
- Portugal, S.J.; White, C.R. Miniaturization of biologgers is not alleviating the 5% rule. Methods Ecol. Evol. 2018, 9, 1662–1666. [Google Scholar] [CrossRef]
- Stidsholt, L.; Johnson, M.; Beedholm, K.; Jakobsen, L.; Kugler, K.; Brinkløv, S.; Salles, A.; Moss, C.F.; Madsen, P.T. A 2.6-g sound and movement tag for studying the acoustic scene and kinematics of echolocating bats. Methods Ecol. Evol. 2019, 10, 48–58. [Google Scholar] [CrossRef]
- Dechmann, D.K.N.; Wikelski, M.; Varga, K.; Yohannes, E.; Fiedler, W.; Safi, K.; Burkhard, W.D.; O’Mara, M.T. Tracking Post-Hibernation Behavior and Early Migration Does Not Reveal the Expected Sex-Differences in a “Female-Migrating” Bat. PLoS ONE 2014, 9, e114810. [Google Scholar] [CrossRef]
- O’Mara, M.T.; Scharf, A.K.; Fahr, J.; Abedi-Lartey, M.; Wikelski, M.; Dechmann, D.K.N.; Safi, K. Overall dynamic body acceleration in straw-coloured fruit bats increases in headwinds but not with airspeed. Front. Ecol. Evol. 2019, 7, 200. [Google Scholar] [CrossRef]
- Frick, W.; Baerwald, E.; Pollock, J.; Barclay, R.; Szymanski, J.; Weller, T.; Russell, A.; Loeb, S.; Medellin, R.; McGuire, L. Fatalities at wind turbines may threaten population viability of a migratory bat. Biol. Conserv. 2017, 209, 172–177. [Google Scholar] [CrossRef]
- Voigt, C.C.; Lehnert, L.S.; Petersons, G.; Adorf, F.; Bach, L. Wildlife and renewable energy: German politics cross migratory bats. Eur. J. Wildl. Res. 2015, 61, 213–219. [Google Scholar] [CrossRef]
- Hutterer, R.; Ivanova, T.; Meyer-Cords, C.; Rodrigues, L. Bat Migrations in Europe: A Review of Banding Data and Literature; Naturschutz und Biologische Vielfalt, Bundesamt für Naturschutz: Bonn, Germany, 2005; p. 162. [Google Scholar]
- Steffens, R.; Zoephel, U.; Brockmann, D. 40 Jahre Fledermausmarkierungszentrale Dresden—Methodische Hinweise und Ergebnisübersicht; Sächsische Landesamt für Umwelt und Geologie: Dresden, Germany, 2004; p. 125. [Google Scholar]
- Lehnert, L.S.; Kramer-Schadt, S.; Teige, T.; Hoffmeister, U.; Popa-Lisseanu, A.; Bontadina, F.; Ciechanowski, M.; Dechmann, D.K.; Kravchenko, K.; Presetnik, P.; et al. Variability and repeatability of noctule bat migration in Central Europe: Evidence for partial and differential migration. Proc. R. Soc. B 2018, 285. [Google Scholar] [CrossRef]
- O’Mara, M.T.; Wikelski, M.; Dechmann, D.K. 50 Years of Bat Tracking: Device Attachment and Future Directions. Methods Ecol. Evol. 2014, 5, 311–319. [Google Scholar] [CrossRef]
- Naef-Daenzer, B.; Früh, D.; Stalder, M.; Wetli, P.; Weise, E. Miniaturization (0.2 g) and evaluation of attachment techniques of telemetry transmitters. J. Exp. Biol. 2005, 208, 4063–4068. [Google Scholar] [CrossRef] [PubMed]
- Taylor, P.; Crewe, T.; Mackenzie, S.; Lepage, D.; Aubry, Y.; Crysler, Z.; Finney, G.; Francis, C.; Guglielmo, C.; Hamilton, D.; et al. The Motus Wildlife Tracking System: A collaborative research network to enhance the understanding of wildlife movement. Avian Conserv. Ecol. 2017, 12. [Google Scholar] [CrossRef]
- Lotek. NanoTags (Coded VHF). Available online: https://www.lotek.com/wp-content/uploads/2023/01/NanoTags-Coded-VHF-Spec-Sheet.pdf (accessed on 25 May 2023).
- Dressler, F.; Ripperger, S.; Hierold, M.; Nowak, T.; Eibel, C.; Cassens, B.; Mayer, F.; Meyer-Wegener, K.; Koelpin, A. From radio telemetry to ultra-low-power sensor networks: Tracking bats in the wild. IEEE Commun. Mag. 2016, 54, 129–135. [Google Scholar] [CrossRef]
- Ripperger, S.P.; Carter, G.G.; Page, R.A.; Duda, N.; Koelpin, A.; Weigel, R.; Hartmann, M.; Nowak, T.; Thielecke, J.; Schadhauser, M.; et al. Thinking small: Next-generation sensor networks close the size gap in vertebrate biologging. PLoS Biol. 2020, 18, e3000655. [Google Scholar] [CrossRef]
- Duda, N.; Barthule, A.; Ripperger, S.; Mayer, F.; Weigel, R.; Koelpin, A. Non-Invasive Low Power ECG for Heart Beat Detection of Bats. In Proceedings of the 2019 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Orlando, FL, USA, 20–23 January 2019; pp. 1–4. [Google Scholar]
- Weiser, A.W.; Orchan, Y.; Nathan, R.; Charter, M.; Weiss, A.J.; Toledo, S. Characterizing the Accuracy of a Self-Synchronized Reverse-GPS Wildlife Localization System. In Proceedings of the 2016 15th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Vienna, Austria, 11–14 April 2016; pp. 1–12. [Google Scholar]
- Toledo, S.; Kishon, O.; Orchan, Y.; Shohat, A.; Nathan, R. Lessons and Experiences from the Design, Implementation, and Deployment of a Wildlife Tracking System. In Proceedings of the 2016 IEEE International Conference on Software Science, Technology and Engineering (SWSTE), Beer Sheva, Israel, 23–24 June 2016; pp. 51–60. [Google Scholar]
- Toledo, S.; Shohami, D.; Schiffner, I.; Lourie, E.; Orchan, Y.; Bartan, Y.; Nathan, R. Cognitive map–based navigation in wild bats revealed by a new high-throughput tracking system. Science 2020, 369, 188–193. [Google Scholar] [CrossRef]
- Lotek. PinPoint GPS Store-On-Board Loggers. Available online: https://www.lotek.com/wp-content/uploads/2017/10/PinPoint-GPS-store-on-board-loggers-Spec-Sheet.pdf (accessed on 25 May 2023).
- O’Mara, M.T.; Amorim, F.; Scacco, M.; McCracken, G.F.; Safi, K.; Mata, V.; Tomé, R.; Swartz, S.; Wikelski, M.; Beja, P.; et al. Bats use topography and nocturnal updrafts to fly high and fast. Curr. Biol. 2021, 31, 1311–1316. [Google Scholar] [CrossRef]
- Curry, A. The internet of animals that could help to save vanishing wildlife. Nature 2018, 562, 322–326. [Google Scholar] [CrossRef]
- Jetz, W.; Tertitski, G.; Kays, R.; Mueller, U.; Wikelski, M. Biological Earth observation with animal sensors. Trends Ecol. Evol. 2022, 37, 293–298. [Google Scholar] [CrossRef]
- Wikelski, M. ICARUS—Invitation to Join a Global Small-Object (Animal) Observation Network. Available online: https://www.icarus.mpg.de/38177/MP_ICARUS_Flyer-EN.pdf (accessed on 8 June 2022).
- Pennisi, E. War halts project to track wildlife from space. Science 2022. [Google Scholar] [CrossRef]
- Collecte Localisation Satellites (CLS). Argos-3—The New Generation. Available online: https://www.argos-system.org/wp-content/uploads/2016/08/r241_f34_argos3_metop_en.pdf (accessed on 16 March 2022).
- Collecte Localisation Satellites (CLS). Global Animal Tracking—Argos Satellite Services. Available online: https://www.argos-system.org/wp-content/uploads/2019/12/5771-CLS-Argos-4P-_BD_Baleine.pdf (accessed on 16 March 2022).
- Lisovski, S.; Bauer, S.; Briedis, M.; Davidson, S.C.; Dhanjal-Adams, K.L.; Hallworth, M.T.; Karagicheva, J.; Meier, C.M.; Merkel, B.; Ouwehand, J.; et al. Light-level geolocator analyses: A user’s guide. J. Anim. Ecol. 2020, 89, 221–236. [Google Scholar] [CrossRef] [PubMed]
- Lotek. fLight Geolocators for Birds. Available online: https://www.lotek.com/wp-content/uploads/2022/05/fLight-Geolocators-for-birds-Spec-Sheet.pdf (accessed on 25 May 2023).
- Kreutzfeldt, J.; Floeter, C.; Lingner, T.; Schmitz-Beuting, L.; Reich, M.; Kunz, V.D. Analytical volume model for optimized spatial radar bat detection in onshore wind parks. PLoS ONE 2020, 15, e0239911. [Google Scholar] [CrossRef] [PubMed]
- Moll, J.; Zadeh, A.T.; Mälzer, M.; Simon, J.; Krozer, V.; Kramer, C.; Friedmann, H.; Nuber, A.; Dürr, M.; Pozdniakov, D.; et al. Radar-based Detection of Birds at Wind Turbine Installations: Results from a Field Study. In Proceedings of the 2020 23rd International Microwave and Radar Conference (MIKON), Warsaw, Poland, 5–7 October 2020; pp. 285–288. [Google Scholar]
- Popa-Lisseanu, A.G.; Voigt, C.C. Bats on the move. J. Mammal. 2009, 90, 1283–1289. [Google Scholar] [CrossRef]
- Gizikis, A.; Embabyl, I.; Vivier, B.; Lumbrera, C. Pilot Project on the Design, Implementation and Execution of the Transfer of GNSS Data during an E112 Call to the PSAP. Available online: https://ec.europa.eu/docsroom/documents/24781/attachments/2/translations/en/renditions/pdf (accessed on 16 March 2022).
- Erhardt, S. Langzeit-Funklokalisierungsverfahren mit extrem energieeffizienten, miniaturisierten Mobilfunkloggern. Ph.D. Thesis, Hamburg University of Technology, Hamburg, Germany, 2022. [Google Scholar]
- Aernouts, M.; Bellekens, B.; Berkvens, R.; Weyn, M. A Comparison of Signal Strength Localization Methods with Sigfox. In Proceedings of the 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), Jacobs University, Bremen, Germany, 25–26 October 2018; pp. 1–6. [Google Scholar]
- Choi, W.; Chang, Y.S.; Jung, Y.; Song, J. Low-Power LoRa Signal-Based Outdoor Positioning Using Fingerprint Algorithm. ISPRS Int. J. Geo-Inf. 2018, 7, 440. [Google Scholar] [CrossRef]
- Colás, Á.; Bada, J.; Guerrero, J. The Status of the 2G/3G Network Sunset. Available online: https://nae.global/en/the-status-of-the-2g-3g-network-sunset/ (accessed on 9 June 2020).
- Erhardt, S.; Koller, J.; Lurz, F.; Weigel, R.; Koelpin, A. An Automatic Detection and Data Downlink System for Miniature Bat Loggers. In Proceedings of the 2020 IEEE Radio and Wireless Symposium (RWS), San Antonio, TX, USA, 26–29 January 2020; pp. 247–250. [Google Scholar]
- Lotek. VHF Avian Tags for Smaller Species. Available online: https://www.lotek.com/wp-content/uploads/2017/10/VHF-Avian-Tags-for-smaller-species-Spec-Sheet.pdf (accessed on 25 May 2023).
- Duda, N.; Nowak, T.; Hartmann, M.; Schadhauser, M.; Cassens, B.; Wägemann, P.; Nabeel, M.; Ripperger, S.; Herbst, S.; Meyer-Wegener, K.; et al. BATS: Adaptive ultra low power sensor network for animal tracking. Sensors 2018, 18, 3343. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2G (GSM) | 3G (UMTS) | 4G (LTE) | 5G (NR) | |
|---|---|---|---|---|
| Channel bandwidth | 200 kHz | 5 MHz | 1.4 MHz | 3.6 MHz |
| Modulation | GMSK | QPSK + DSSS | QPSK + OFDM | QPSK + OFDM |
| Frequency bands | 900 MHz | – | 700/800/900/1800 MHz2.1/2.6/3.6 GHz | 700/1800 MHz2.1/3.6 GHz |
| Receiver complexity | low | high | high | high |
| Mode | Operation | Current | Duration | Energy | Condition |
|---|---|---|---|---|---|
| Standby | RTC & ACC | 1.5 µA | ∼24 h | 388.8 mJ | per day |
| GSM | spectrum scan | 30 mA | 361 ms | 32.5 mJ | per scan |
| cell decoding | 30 mA | 32 ms | 2.9 mJ | per cell (best case: 0.9 mJ) | |
| total | % | % | 86.9 mJ | per complete GSM measurement | |
| RF TRX | detection signal | 29 mA | 107 ms | 9.3 mJ | per day (base station not in range) |
| data upload | 29 mA | 900 ms | 78.3 mJ | per day (full usage of all timeslots) |
| Avg | Best | Total | |
|---|---|---|---|
| localizations | 708.2 | 1373 | 14,872 |
| decoded base stations | 2836.5 | 5590 | 59,566 |
| run-time/days | 7.5 | 13.4 | 158.3 |
| memory size | 7.5 kB | 167.1 kB | 1.7 MB |
| Category | Remote Localization | Self-Localization | |||||
|---|---|---|---|---|---|---|---|
| System | VHF transmitter | MOTUS (coded VHF) | BATS | ATLAS | Geolocator | GNSS logger | Mobile-BAT |
| Source | [52] | [25,26] | [53] | [30,32] | [41,42] | [33] | this work [47] |
| Method | radio beacon | presence detection, AoA | RSS-DoA | TDoA | daylight + clock | GNSS | GSM cell ID |
| Required infrastructure | direction finding equipment | stationary receivers | stationary receivers | stationary receivers | none | none | none |
| Frequency | 150/166 MHz | 150/166 MHz | 868/915 MHz + 2.4 GHz | 433 MHz | – | 1.5 GHz | 900 MHz |
| Weight | from 0.2 g | from 0.2 g | 1 g | 1 g …10 g | 0.3 g | 1.5 g | 2.0 g |
| Runtime | days to months | days to months | days to weeks | days to weeks | 12 months | days to weeks | 11.2 months |
| Number of localizations | depends on human resources | depends on detects | 350,000 | 100,000 …1 M | 365 (once per day) | up to 130 | 1534 |
| Coverage | depends on human resources | ∼10 km2 per station | ∼1 km2 | ∼1000 km2 | global | global | global (where GSM coverage) |
| Accuracy | depends on human resources | 100 m …10 km | 4 m | 5 m | up to 23 km | 2 m | 100 m …5 km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erhardt, S.; Koch, M.; Kiefer, A.; Veith, M.; Weigel, R.; Koelpin, A. Mobile-BAT—A Novel Ultra-Low Power Wildlife Tracking System. Sensors 2023, 23, 5236. https://doi.org/10.3390/s23115236
Erhardt S, Koch M, Kiefer A, Veith M, Weigel R, Koelpin A. Mobile-BAT—A Novel Ultra-Low Power Wildlife Tracking System. Sensors. 2023; 23(11):5236. https://doi.org/10.3390/s23115236
Chicago/Turabian StyleErhardt, Stefan, Martin Koch, Andreas Kiefer, Michael Veith, Robert Weigel, and Alexander Koelpin. 2023. "Mobile-BAT—A Novel Ultra-Low Power Wildlife Tracking System" Sensors 23, no. 11: 5236. https://doi.org/10.3390/s23115236
APA StyleErhardt, S., Koch, M., Kiefer, A., Veith, M., Weigel, R., & Koelpin, A. (2023). Mobile-BAT—A Novel Ultra-Low Power Wildlife Tracking System. Sensors, 23(11), 5236. https://doi.org/10.3390/s23115236