
Swarm Optimization for Energy-Based Acoustic Source Localization: A Comprehensive Study





Abstract
:1. Introduction
2. Methodology
3. Theoretical Background
3.1. Energy-Based Acoustic Source Localization
3.2. Swarm Intelligence
3.2.1. Cuckoo Search
3.2.2. Grey Wolf Optimizer
3.2.3. Enhanced Elephant Herding Optimization
3.2.4. Moth–Flame Optimization
3.2.5. Whale Optimization Algorithm
| Algorithm 1 Selection of the updating operator. |
| Generate if then Generate (Section 3.2.2) if then Update agent with (7). (exploitation) else Update agent with (8). (exploration) end if else Update agent with (9) end if |
3.2.6. Salp Swarm Algorithm
3.2.7. Tree Growth Algorithm
3.2.8. Coyote Optimization Algorithm
3.2.9. Supply–Demand Optimization
3.2.10. Momentum Search Algorithm
3.2.11. Summary
3.3. Population Initialization
4. Testing Procedure and Experimental Setup
| Algorithm 2 Testing procedure on the Raspberry boards. | |
| ▹ Number of sensors | |
| ▹ Noise variances | |
| ▹ Types of swarm initialization | |
| for alldo | |
| LoadDataset() | ▹ Energies, sensors’ positions, etc. |
| for do | |
| Clock() | |
| = Execute(, data[m]) | ▹ Location estimation by algorithm a. contains |
| the best solutions found so far at each iteration of the algorithm | |
| Clock() − startTime | |
| end for | |
| SaveToFile() | |
| end for |
5. Results and Discussion
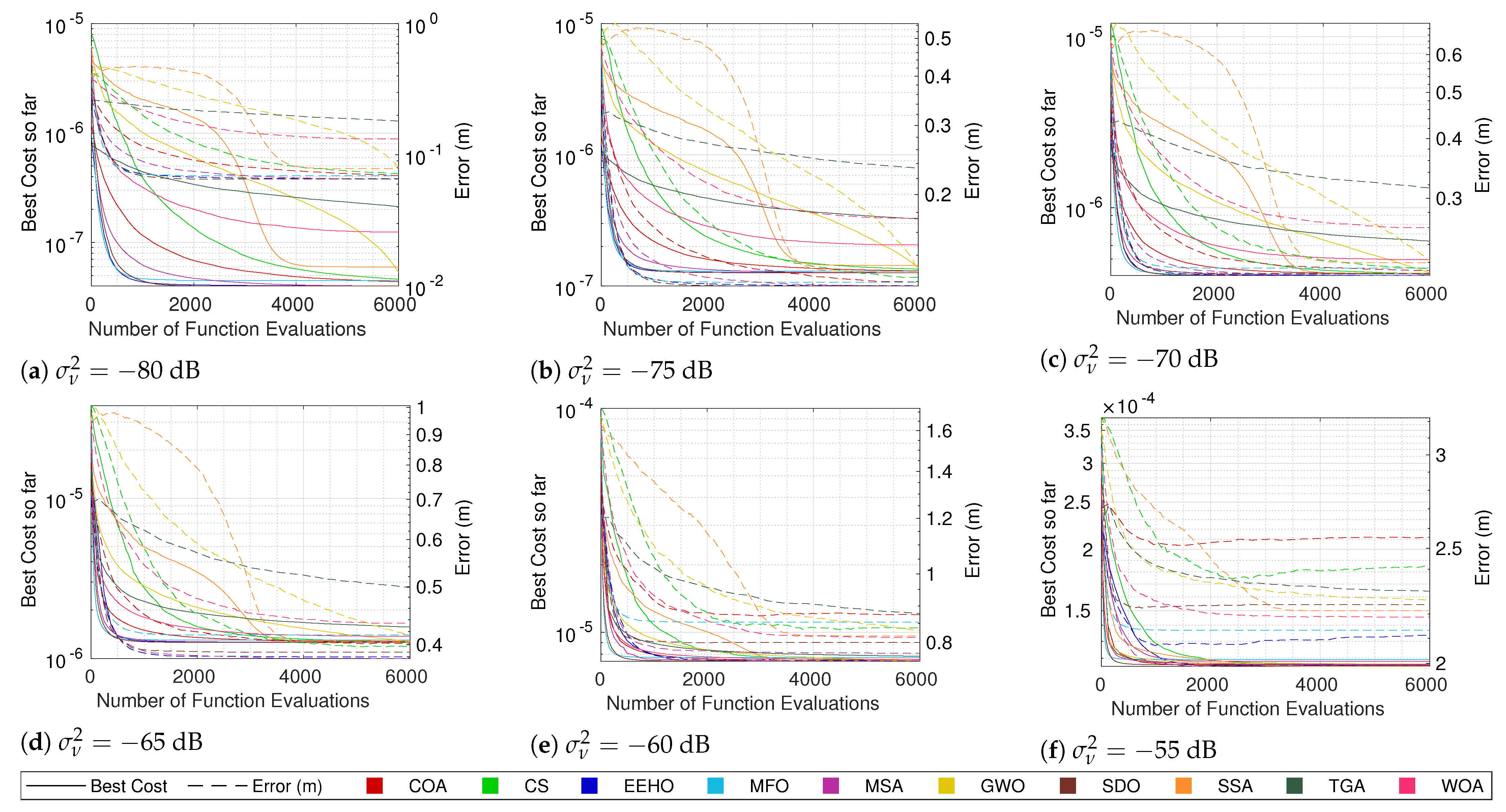
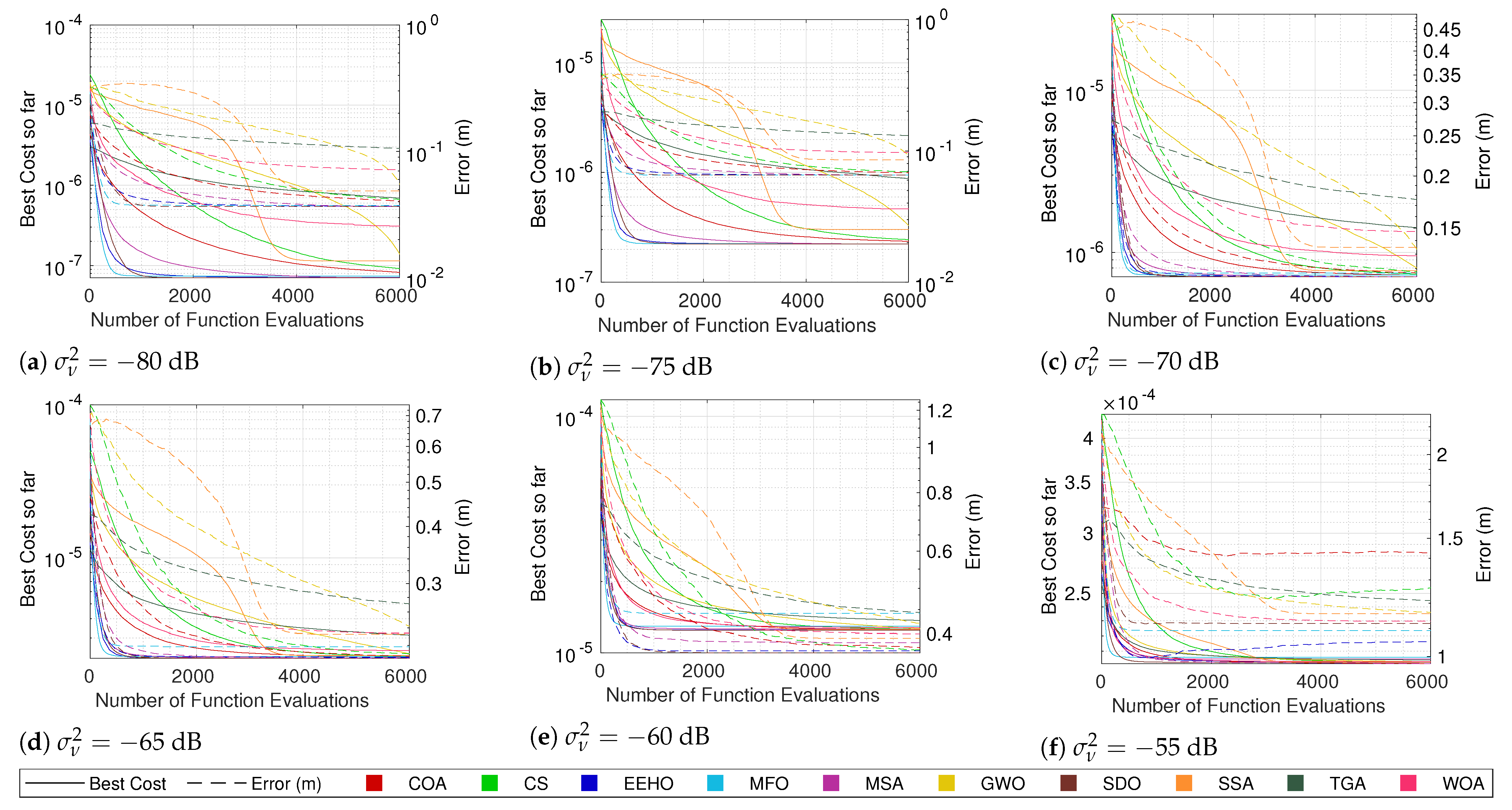
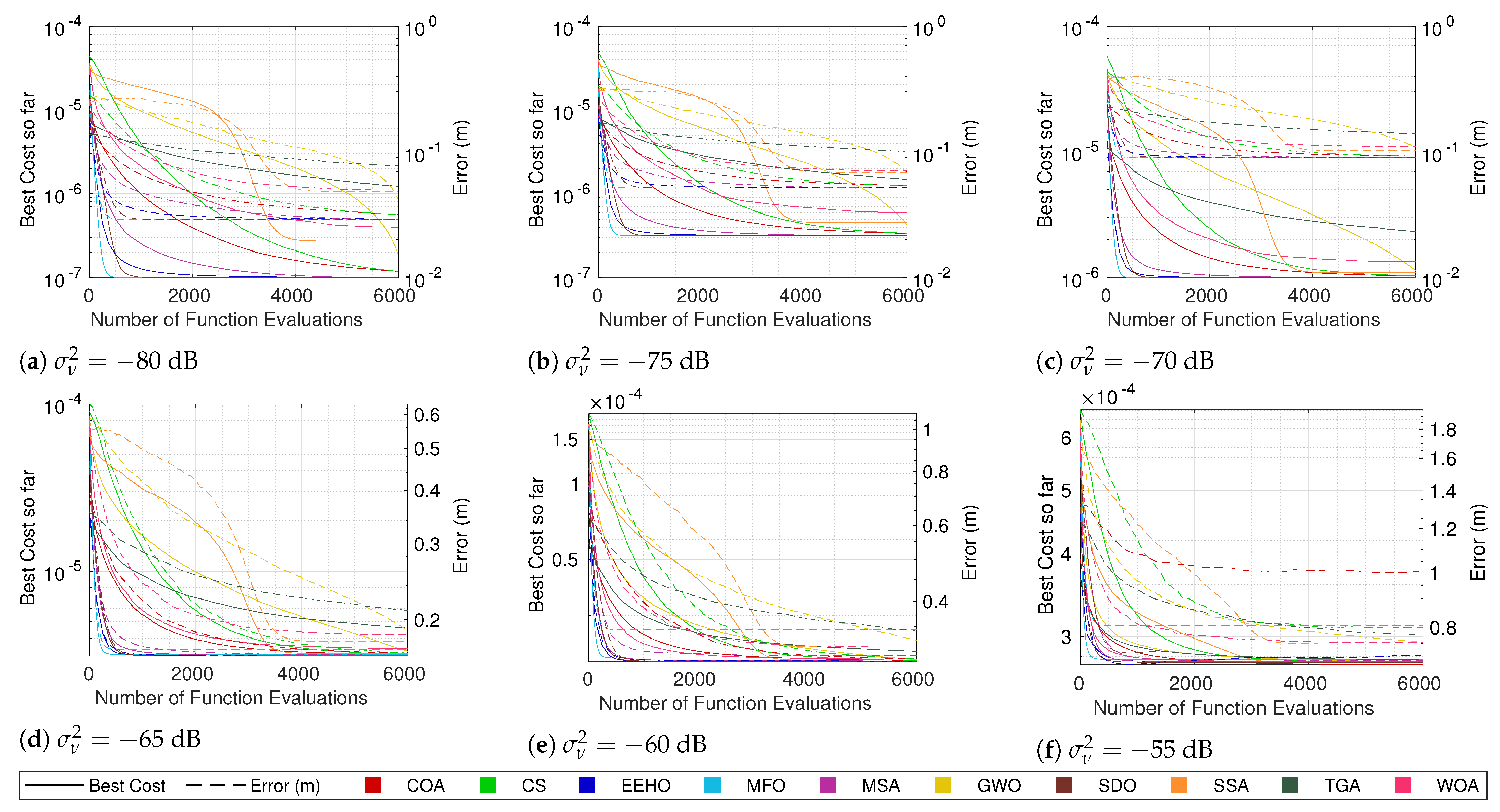
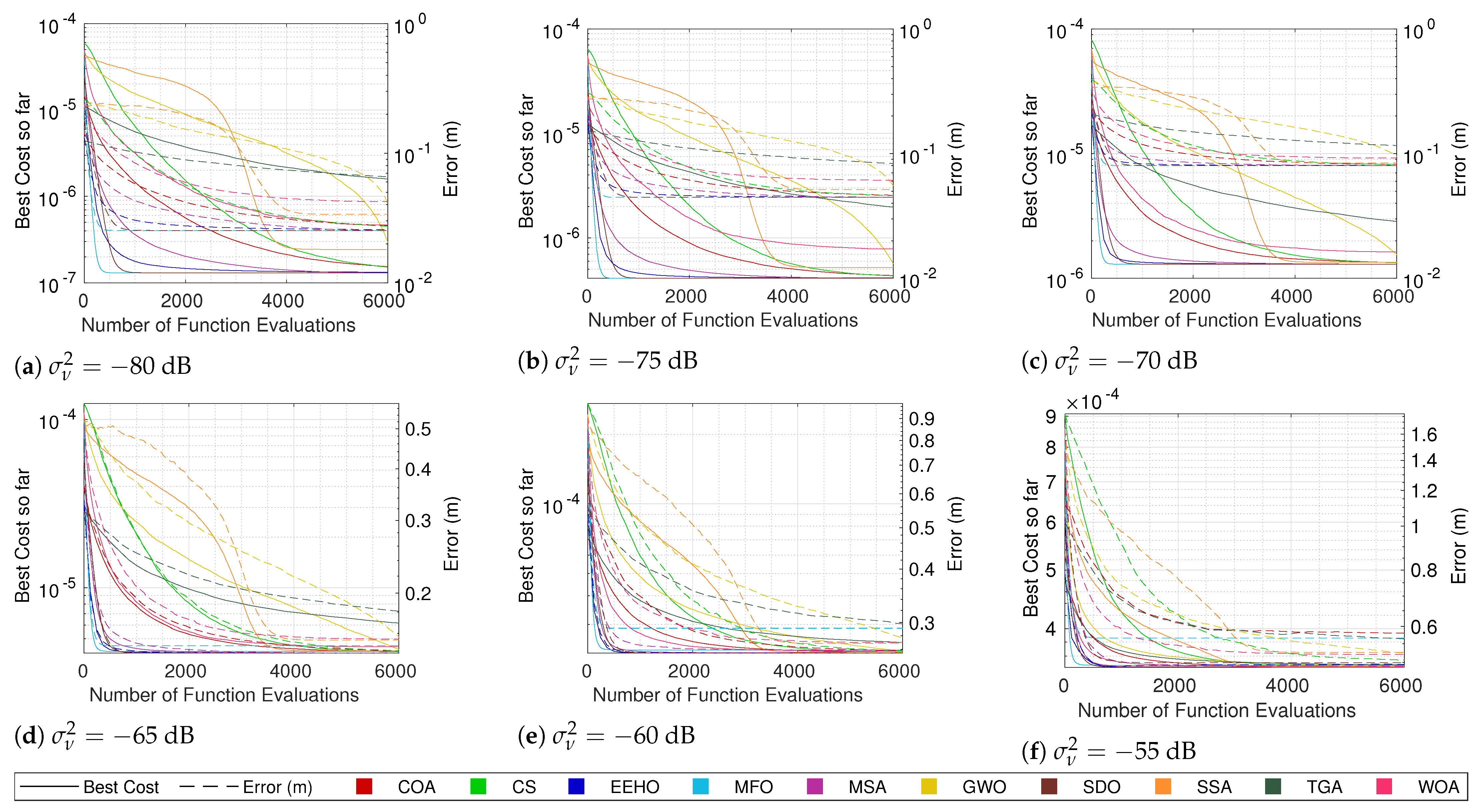
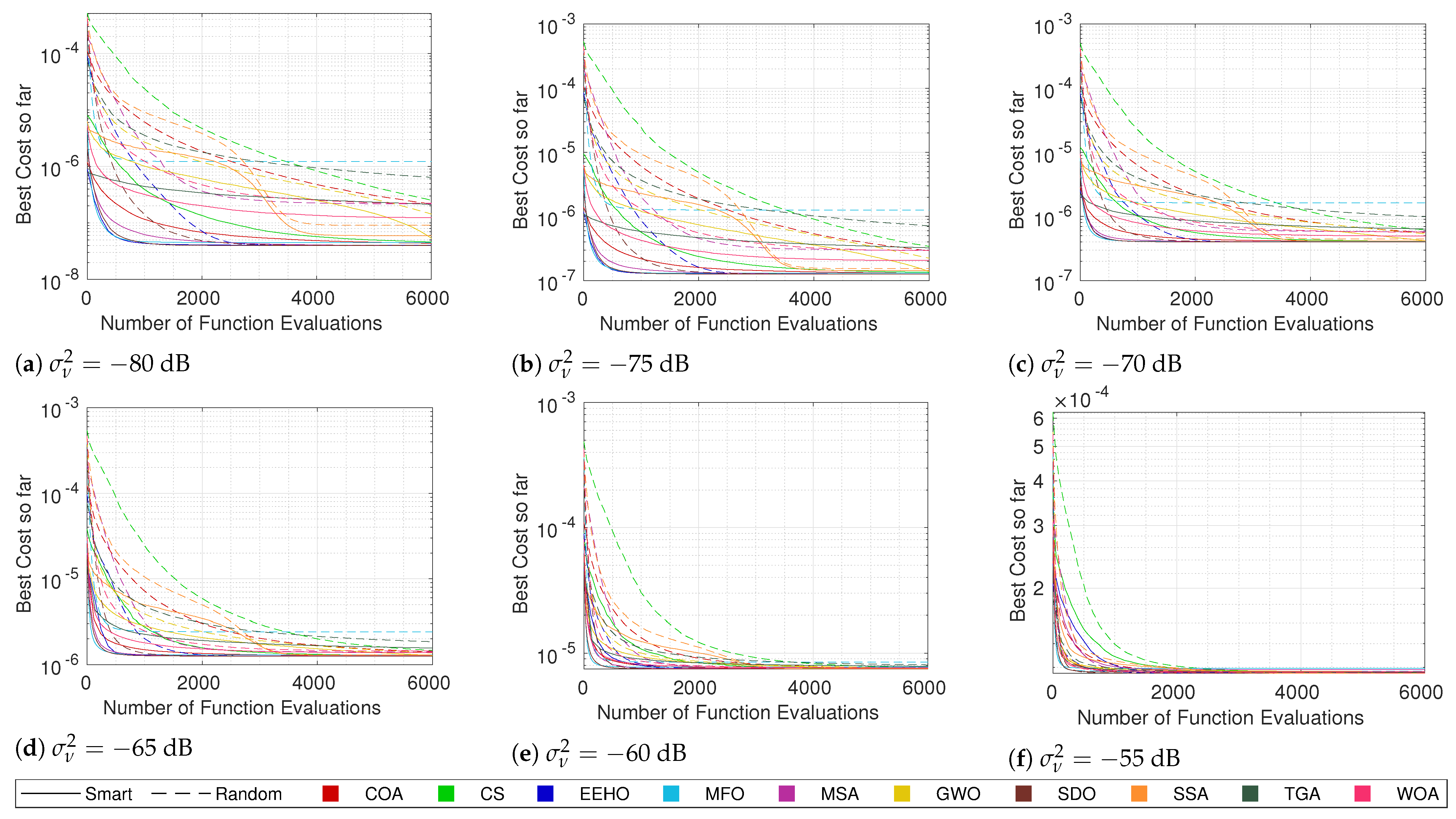
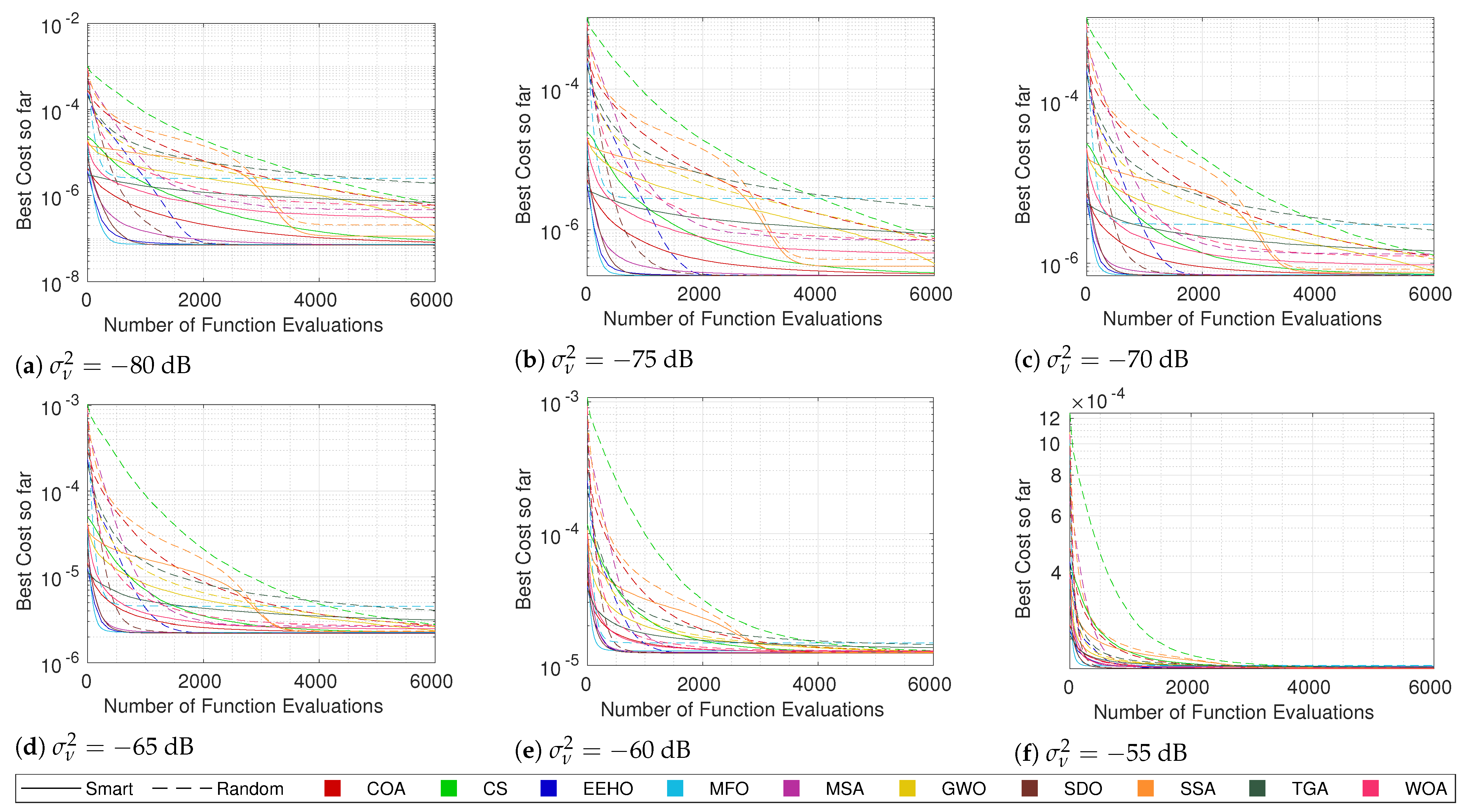
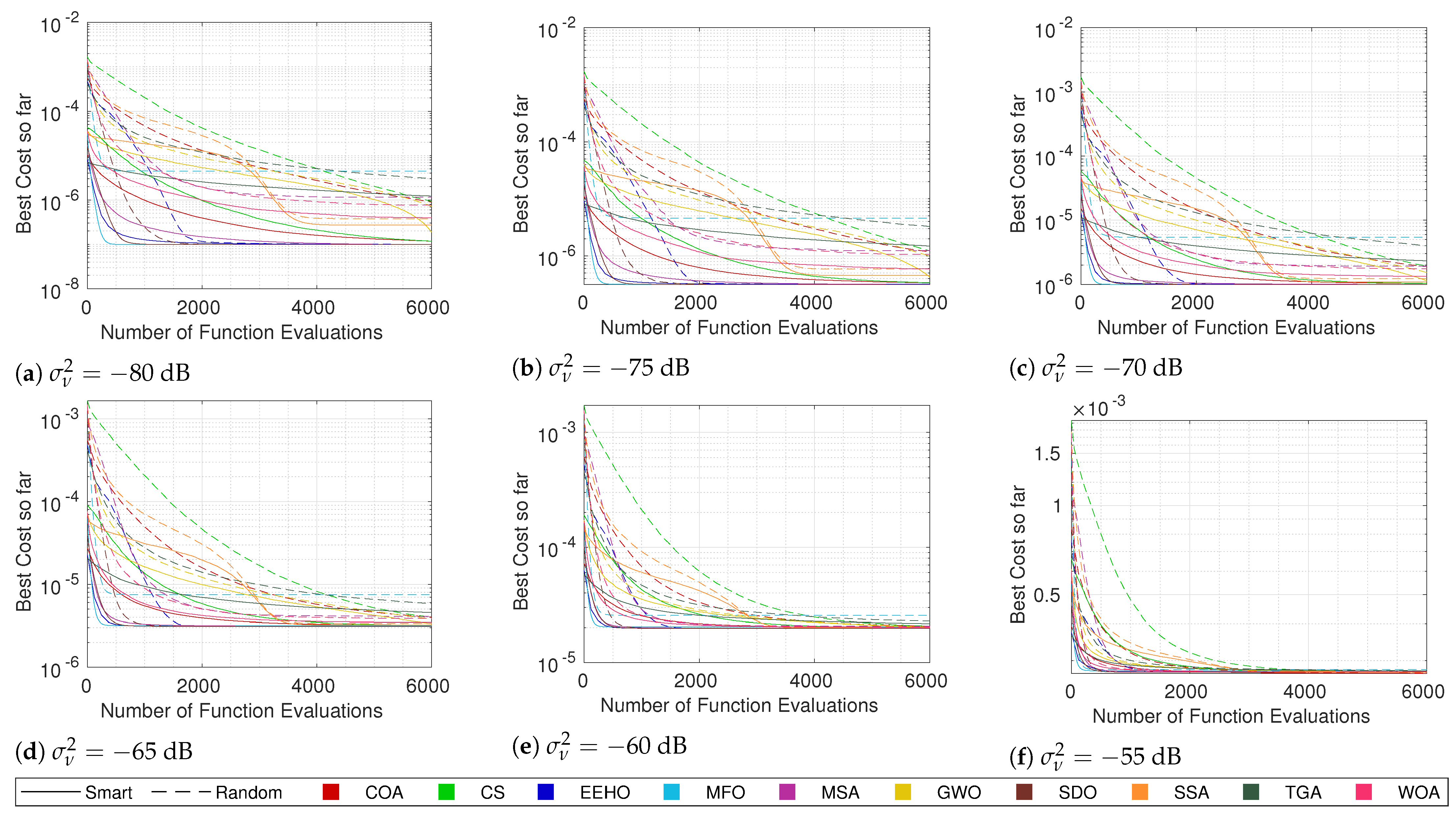
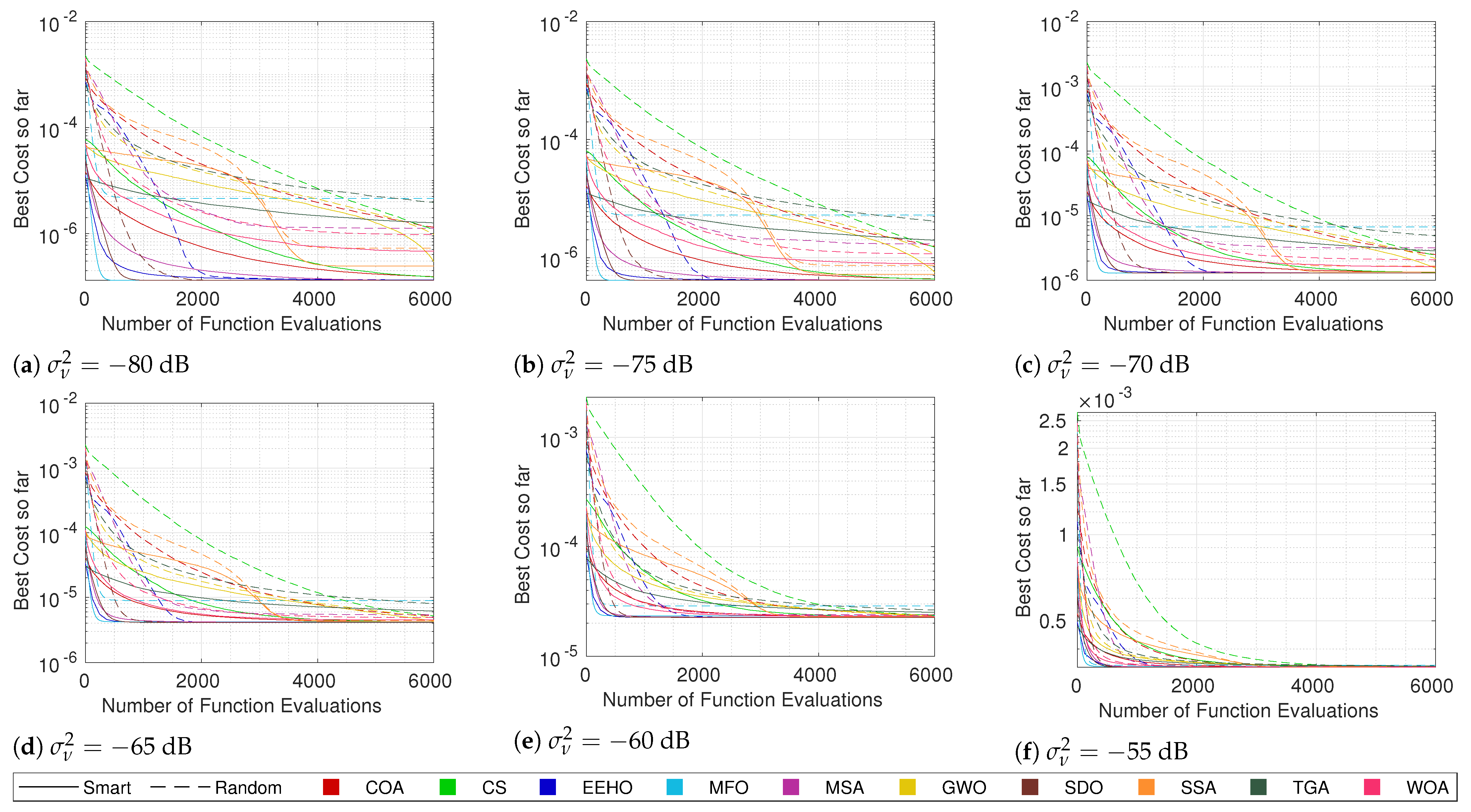
5.1. Algorithm Comparison
5.2. Smart/Intelligent vs. Random Initialization
5.3. Time Efficiency
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A. Definitions and Notation
Appendix B. Swarm Algorithm Listing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Acronym | (*) | (**) | Method (Reference) | |
|---|---|---|---|---|---|
| –1999 | 1995 | PSO | 61,839 | 2474 | Particle Swarm Optimization [9] |
| 1996 | ANT | 14,356 | 598 | Ant System [73] | |
| 2000–2010 | 2001 | HS | 5315 | 280 | Harmony Search [11] |
| 2002 | BF | 3214 | 179 | Bacterial Foraging [12] | |
| 2004 | HB | 323 | 20 | Honey Bees [13] | |
| 2006 | SOA | 152 | 11 | Seeker Optimization Algorithm [92] | |
| GSO | 211 | 15 | Glowworm Swarm Optimization [93] | ||
| HBMO | 361 | 26 | Honey Bee Mating Optimization [94] | ||
| CSO | 502 | 36 | Cat Swarm Optimization [95] | ||
| BA | 1339 | 96 | Bee Algorithm [14] | ||
| 2007 | MS | 228 | 18 | Monkey Search [96] | |
| IWD | 325 | 25 | Intelligent Water Drops [97] | ||
| ICA | 2228 | 171 | Imperialist Competitive Algorithm [98] | ||
| ABC | 5045 | 388 | Artificial Bee Colony [15] | ||
| 2008 | BBO | 2821 | 235 | Biogeography-Based Optimization [99] | |
| 2009 | DS | 38 | 3 | Dialectic Search [100] | |
| GSO | 681 | 62 | Group Search Optimizer [101] | ||
| GSA | 4354 | 396 | Gravitational Search Algorithm [102] | ||
| CS | 5100 | 464 | Cuckoo Search [16] | ||
| 2010–2015 | 2010 | SO | 112 | 11 | Spiral Optimization [103] |
| FWA | 729 | 73 | Fireworks Algorithm for Optimization [104] | ||
| CSS | 900 | 90 | Charged System Search [105] | ||
| FA | 3112 | 311 | Firefly Algorithm [106] | ||
| BAT | 3753 | 375 | Bat Algorithm [17] | ||
| 2011 | GSA | 160 | 18 | Galaxy-Based Search Algorithm [107] | |
| DS | 368 | 41 | Differential Search [108] | ||
| BSO | 414 | 46 | Brain Storm Optimization Algorithm [109] | ||
| FOA | 1126 | 125 | Fruit Fly Optimization Algorithm [110] | ||
| TLBO | 2227 | 247 | Teaching–Learning-Based Optimization [62] | ||
| 2012 | ACROA | 66 | 8 | Artificial Chemical Reaction Optimization Algorithm [111] | |
| ACS | 105 | 13 | Artificial Cooperative Search [112] | ||
| MBO | 198 | 25 | Migrating Bird Optimization [113] | ||
| RO | 396 | 50 | Ray Optimization [114] | ||
| MBA | 412 | 52 | Mine Blast Algorithm [115] | ||
| BH | 622 | 78 | Black Hole [116] | ||
| KH | 1214 | 152 | Krill Herd [117] | ||
| 2013 | LCA | 132 | 19 | League Championship Algorithm [118] | |
| DE | 293 | 42 | Dolphin Echolocation [119] | ||
| SSO | 338 | 48 | Social Spider Optimization [120] | ||
| 2014 | OIO | 97 | 16 | Optics-Inspired Optimization [121] | |
| VS | 175 | 29 | Vortex Search [122] | ||
| ISA | 241 | 40 | Interior Search Algorithm [123] | ||
| SFS | 255 | 43 | Stochastic Fractal Search [124] | ||
| SMO | 266 | 44 | Spider Monkey Optimization [125] | ||
| PIO | 274 | 46 | Pigeon-Inspired Optimization [126] | ||
| WWO | 285 | 48 | Water Wave Optimization [127] | ||
| CSO | 314 | 52 | Chicken Swarm Optimization [128] | ||
| CBO | 388 | 65 | Colliding Bodies Optimization [129] | ||
| SOS | 713 | 119 | Symbiotic Organism Search [130] | ||
| GWO | 4112 | 685 | Grey Wolf Optimizer [61] | ||
| 2015–2020 | 2015 | VOA | 34 | 7 | Virus Optimization Algorithm [131] |
| WSA | 40 | 8 | Weighted Superposition Attraction [132] | ||
| MBO | 163 | 33 | Monarch Butterfly Optimization [133] | ||
| LSA | 171 | 34 | Lightning Search Algorithm [134] | ||
| EHO | 227 | 45 | Elephant Herding Optimization [51] | ||
| DA | 877 | 175 | Dragonfly Algorithm [135] | ||
| SCA | 1016 | 203 | Sine–Cosine Algorithm [136] | ||
| ALO | 1161 | 232 | The Ant Lion Optimizer [137] | ||
| MFO | 1167 | 233 | Moth–Flame Optimization [63] | ||
| 2016 | SWA | 53 | 13 | Sperm Whale Algorithm [138] | |
| MS | 192 | 48 | Moth Search [139] | ||
| CSA | 689 | 172 | Crow Search Algorithm [140] | ||
| WOA | 2227 | 557 | Whale Optimization Algorithm [64] | ||
| 2017 | KA | 58 | 19 | Kidney-Inspired Algorithm [141] | |
| SHO | 65 | 22 | Selfish Herd Optimizer [142] | ||
| TEO | 126 | 42 | Thermal Exchange Optimization [143] | ||
| SHO | 166 | 55 | Spotted Hyena Optimizer [144] | ||
| GOA | 700 | 233 | Grasshopper Optimization Algorithm [145] | ||
| SSA | 894 | 298 | Salp Swarm Algorithm [65] | ||
| 2018 | TGA | 45 | 15 | Tree Growth Algorithm [66] | |
| FF | 59 | 20 | Farmland Fertility [146] | ||
| COA | 85 | 28 | Coyote Optimization Algorithm [67] | ||
| BOA | 172 | 57 | Butterfly Optimization Algorithm [147] | ||
| EWA | 174 | 58 | Earthworm Optimization Algorithm [148] | ||
| 2019 | NRO | 6 | 6 | Nuclear Reaction Optimization [149] | |
| SDO | 9 | 9 | Supply–Demand-Based Optimization [68] | ||
| PRO | 12 | 12 | Poor and Rich Optimization Algorithm [150] | ||
| EEHO | 16 | 16 | Enhanced Elephant Herding Optimization [69] | ||
| FDO | 20 | 20 | Fitness Dependent Optimizer [151] | ||
| BWO | 20 | 20 | Black Widow Optimization Algorithm [152] | ||
| PFA | 32 | 32 | Pathfinder Algorithm [153] | ||
| EO | 56 | 56 | Equilibrium Optimizer [154] | ||
| SOA | 60 | 60 | Seagull Optimization Algorithm [155] | ||
| SSA | 150 | 150 | Squirrel Search Algorithm [65] | ||
| HHO | 323 | 323 | Harris Hawks Optimization [71] | ||
| 2020 | BOA | 1 | 1 | Billiards-Inspired Optimization Algorithm [156] | |
| WSA | 5 | 1 | Water Strider Algorithm [157] | ||
| DGCO | 7 | 7 | Dynamic Group-Based Cooperative Optimization [158] | ||
| TSA | 12 | 12 | Tunicate Swarm Algorithm [159] | ||
| MPA | 38 | 38 | Marine Predators Algorithm [160] | ||
| WFS | - | - | Wingsuit Flying Search [161] | ||
| AOA | - | - | Archimedes Optimization Algorithm [162] | ||
| MSA | - | - | Momentum Search Algorithm [72] |
References
- Culioli, J.C. Introduction à l’Optimisation; Références Sciences; Ellipses: Paris, France, 2012. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Liu, Y.; Chen, Q. 150 years of Darwin’s theory of intercellular flow of hereditary information. Nat. Rev. Mol. Cell Biol. 2018, 19, 749–750. [Google Scholar] [CrossRef] [PubMed]
- Mahjoob Karambasti, B.; Ghodrat, M.; Ghorbani, G.; Lalbakhsh, A.; Behnia, M. Design methodology and multi-objective optimization of small-scale power-water production based on integration of Stirling engine and multi-effect evaporation desalination system. Desalination 2022, 526, 115542. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Yuret, D.; de la Maza, M. Dynamic Hill Climbing: Overcoming the limitations of optimization techniques. In Proceedings of the Second Turkish Symposium on Artificial Intelligence and Neural Networks, Istanbul, Turkey, 24–25 June 1993; pp. 208–212. [Google Scholar]
- Bousson, K.; Correia, S.D. Optimization algorithm based on densification and dynamic canonical descent. J. Comput. Appl. Math. 2006, 191, 269–279. [Google Scholar] [CrossRef] [Green Version]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed Optimization by Ant Colonies. In Proceedings of the European Conference on Artificial Life, ECAL’91, Paris, France, 11–13 December 1991; Elsevier Publishing: Amsterdam, The Netherlands, 1991; Volume 142, pp. 134–142. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Bonyadi, M.R.; Michalewicz, Z. Particle Swarm Optimization for Single Objective Continuous Space Problems: A Review. Evol. Comput. 2017, 25, 1–54. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A New Heuristic Optimization Algorithm: Harmony Search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. Mag. 2002, 22, 52–67. [Google Scholar] [CrossRef]
- Nakrani, S.; Tovey, C. On Honey Bees and Dynamic Server Allocation in Internet Hosting Centers. Adapt. Behav. 2004, 12, 223–240. [Google Scholar] [CrossRef]
- Pham, D.T.; Ghanbarzadeh, A.; Koç, E.; Otri, S.; Rahim, S.; Zaidi, M. The bees algorithm—A novel tool for complex optimisation problems. In Intelligent Production Machines and Systems; Elsevier: Amsterdam, The Netherlands, 2006; pp. 454–459. [Google Scholar]
- Karaboga, D.; Basturk, B. Artificial Bee Colony (ABC) Optimization Algorithm for Solving Constrained Optimization Problems. In Foundations of Fuzzy Logic and Soft Computing; Melin, P., Castillo, O., Aguilar, L.T., Kacprzyk, J., Pedrycz, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 789–798. [Google Scholar]
- Yang, X.; Deb, S. Cuckoo Search via Lévy flights. In Proceedings of the 2009 World Congress on Nature Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.S. A New Metaheuristic Bat-Inspired Algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); González, J.R., Pelta, D.A., Cruz, C., Terrazas, G., Krasnogor, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 65–74. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Sun, J.; Liu, T.; Zhang, K.; Zhang, Q. Balancing exploration and exploitation in multiobjective evolutionary optimization. Inf. Sci. 2019, 497, 129–148. [Google Scholar] [CrossRef]
- Jain, N.K.; Nangia, U.; Jain, J. Impact of Particle Swarm Optimization Parameters on its Convergence. In Proceedings of the 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 22–24 October 2018; pp. 921–926. [Google Scholar] [CrossRef]
- Li, Q.; Liu, S.Y.; Yang, X.S. Influence of initialization on the performance of metaheuristic optimizers. Appl. Soft Comput. 2020, 91, 106–193. [Google Scholar] [CrossRef] [Green Version]
- Kumar, M.M.S.; Yadav, H.; Soman, D.; Kumar, A.; Reddy, N.A.K. Acoustic Localization for Autonomous Unmanned Systems. In Proceedings of the 2020 14th International Conference on Innovations in Information Technology (IIT), Al Ain, United Arab Emirates, 17–18 November 2020; pp. 69–74. [Google Scholar] [CrossRef]
- Ullah, I.; Liu, Y.; Su, X.; Kim, P. Efficient and Accurate Target Localization in Underwater Environment. IEEE Access 2019, 7, 101415–101426. [Google Scholar] [CrossRef]
- Chang, X.; Yang, C.; Wu, J.; Shi, X.; Shi, Z. A Surveillance System for Drone Localization and Tracking Using Acoustic Arrays. In Proceedings of the 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop (SAM), Sheffield, UK, 8–11 July 2018; pp. 573–577. [Google Scholar] [CrossRef]
- Correia, S.D.; Fé, J.; Tomic, S.; Beko, M. Drones as Sound Sensors for Energy-Based Acoustic Tracking on Wildfire Environments. In Proceedings of the 4th IFIP International Internet of Things (IOT) Conference, Virtual Event, 4–5 November 2021; Springer: Cham, Switzerland, 2021; pp. 1–17. [Google Scholar] [CrossRef]
- Tang, L.; Luo, R.; Deng, M.; Su, J. Study of Partial Discharge Localization Using Ultrasonics in Power Transformer Based on Particle Swarm Optimization. IEEE Trans. Dielectr. Electr. Insul. 2008, 15, 492–495. [Google Scholar] [CrossRef]
- Mirzaei, H.R.; Akbari, A.; Gockenbach, E.; Zanjani, M.; Miralikhani, K. A novel method for ultra-high-frequency partial discharge localization in power transformers using the particle swarm optimization algorithm. IEEE Electr. Insul. Mag. 2013, 29, 26–39. [Google Scholar] [CrossRef]
- Alloza, P.; Vonrhein, B. Noise source localization in industrial facilities. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Madrid, Spain, 16–19 June 2019; Institute of Noise Control Engineering: Reston, VA, USA, 2019; pp. 7616–7627. [Google Scholar]
- Fu, J.; Yin, S.; Cui, Z.; Kundu, T. Experimental Research on Rapid Localization of Acoustic Source in a Cylindrical Shell Structure without Knowledge of the Velocity Profile. Sensors 2021, 21, 511. [Google Scholar] [CrossRef]
- Hu, Z.; Tariq, S.; Zayed, T. A comprehensive review of acoustic based leak localization method in pressurized pipelines. Mech. Syst. Signal Process. 2021, 161, 107994. [Google Scholar] [CrossRef]
- Suwansin, W.; Phasukkit, P. Deep Learning-Based Acoustic Emission Scheme for Nondestructive Localization of Cracks in Train Rails under a Load. Sensors 2021, 21, 272. [Google Scholar] [CrossRef]
- Wang, Y.B.; Chang, D.G.; Fan, Y.H.; Zhang, G.J.; Zhan, J.Y.; Shao, X.J.; He, W.L. Acoustic localization of partial discharge sources in power transformers using a particle-swarm-optimization-route-searching algorithm. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 3647–3656. [Google Scholar] [CrossRef]
- Robles, G.; Fresno, J.; Martínez-Tarifa, J.; Ardila-Rey, J.; Parrado-Hernández, E. Partial Discharge Spectral Characterization in HF, VHF and UHF Bands Using Particle Swarm Optimization. Sensors 2018, 18, 746. [Google Scholar] [CrossRef] [Green Version]
- Hooshmand, R.A.; Parastegari, M.; Yazdanpanah, M. Simultaneous location of two partial discharge sources in power transformers based on acoustic emission using the modified binary partial swarm optimisation algorithm. IET Sci. Meas. Technol. 2013, 7, 119–127. [Google Scholar] [CrossRef]
- Lalbakhsh, A.; Afzal, M.U.; Zeb, B.A.; Esselle, K.P. Design of a dielectric phase-correcting structure for an EBG resonator antenna using particle swarm optimization. In Proceedings of the 2015 International Symposium on Antennas and Propagation (ISAP), Hobart, Australia, 9–12 November 2015; pp. 1–3. [Google Scholar]
- Lalbakhsh, A.; Afzal, M.U.; Esselle, K.P.; Smith, S.L. A high-gain wideband EBG resonator antenna for 60 GHz unlicenced frequency band. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018; pp. 1–3. [Google Scholar] [CrossRef]
- Lalbakhsh, A.; Afzal, M.U.; Esselle, K.P.; Smith, S. Design of an artificial magnetic conductor surface using an evolutionary algorithm. In Proceedings of the 2017 International Conference on Electromagnetics in Advanced Applications (ICEAA), Verona, Italy, 11–15 September 2017; pp. 885–887. [Google Scholar] [CrossRef]
- Xu, E.; Ding, Z.; Dasgupta, S. Source Localization in Wireless Sensor Networks from Signal Time-of-Arrival Measurements. IEEE Trans. Signal Process. 2011, 59, 2887–2897. [Google Scholar] [CrossRef]
- Yang, L.; Ho, K. An Approximately Efficient TDOA Localization Algorithm in Closed-Form for Locating Multiple Disjoint Sources with Erroneous Sensor Positions. IEEE Trans. Signal Process. 2009, 57, 4598–4615. [Google Scholar] [CrossRef]
- Ali, A.M.; Yao, K.; Collier, T.C.; Taylor, C.E.; Blumstein, D.T.; Girod, L. An Empirical Study of Collaborative Acoustic Source Localization. In Proceedings of the 2007 6th International Symposium on Information Processing in Sensor Networks, Cambridge, MA, USA, 25–27 April 2007. [Google Scholar] [CrossRef]
- Li, D.; Hu, Y. Energy based collaborative source localization using acoustic micro-sensor array. EURASIP J. Adv. Signal Process. 2003, 2003, 321–337. [Google Scholar] [CrossRef] [Green Version]
- Sheng, X.; Hu, Y.H. Maximum likelihood multiple-source localization using acoustic energy measurements with wireless sensor networks. IEEE Trans. Signal Process. 2004, 53, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Meng, W.; Xiao, W. Energy-Based Acoustic Source Localization Methods: A Survey. Sensors 2017, 17, 376. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cobos, M.; Antonacci, F.; Alexandridis, A.; Mouchtaris, A.; Lee, B. A Survey of Sound Source Localization Methods in Wireless Acoustic Sensor Networks. Wirel. Commun. Mob. Comput. 2017, 2017, 3956282. [Google Scholar] [CrossRef]
- Meesookho, C.; Mitra, U.; Narayanan, S. On Energy-Based Acoustic Source Localization for Sensor Networks. IEEE Trans. Signal Process. 2008, 56, 365–377. [Google Scholar] [CrossRef]
- Wang, G. A Semidefinite Relaxation Method for Energy-Based Source Localization in Sensor Networks. IEEE Trans. Veh. Technol. 2011, 60, 2293–2301. [Google Scholar] [CrossRef]
- Beko, M. Energy-based localization in wireless sensor networks using semidefinite relaxation. In Proceedings of the 2011 IEEE Wireless Communications and Networking Conference, Cancun, Mexico, 28–31 March 2011; pp. 1552–1556. [Google Scholar] [CrossRef]
- Beko, M. Energy-Based Localization in Wireless Sensor Networks Using Second-Order Cone Programming Relaxation. Wirel. Pers. Commun. 2014, 77, 1847–1857. [Google Scholar] [CrossRef]
- Yan, Y.; Shen, X.; Hua, F.; Zhong, X. On the Semidefinite Programming Algorithm for Energy-Based Acoustic Source Localization in Sensor Networks. IEEE Sens. J. 2018, 18, 8835–8846. [Google Scholar] [CrossRef]
- Shi, J.; Wang, G.; Jin, L. Robust Semidefinite Relaxation Method for Energy-Based Source Localization: Known and Unknown Decay Factor Cases. IEEE Access 2019, 7, 163740–163748. [Google Scholar] [CrossRef]
- Correia, S.D.; Tomic, S.; Beko, M. A Feed-Forward Neural Network Approach for Energy-Based Acoustic Source Localization. J. Sens. Actuator Netw. 2021, 10, 29. [Google Scholar] [CrossRef]
- Wang, G.; Deb, S.; dos S. Coelho, L. Elephant Herding Optimization. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI), Bali, Indonesia, 7–9 December 2015; pp. 1–5. [Google Scholar]
- Li, J.; Lei, H.; Alavi, A.H.; Wang, G.G. Elephant Herding Optimization: Variants, Hybrids, and Applications. Mathematics 2020, 8, 1415. [Google Scholar] [CrossRef]
- Correia, S.D.; Beko, M.; Cruz, L.A.D.S.; Tomic, S. Elephant Herding Optimization for Energy-Based Localization. Sensors 2018, 18, 2849. [Google Scholar]
- Correia, S.D.; Beko, M.; Da Silva Cruz, L.A.; Tomic, S. Implementation and Validation of Elephant Herding Optimization Algorithm for Acoustic Localization. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; pp. 1–4. [Google Scholar]
- Correia, S.D.; Beko, M.; Tomic, S.; Da Silva Cruz, L.A. Energy-Based Acoustic Localization by Improved Elephant Herding Optimization. IEEE Access 2020, 8, 28548–28559. [Google Scholar] [CrossRef]
- Fé, J.; Correia, S.D.; Tomic, S.; Beko, M. Kalman Filtering for Tracking a Moving Acoustic Source based on Energy Measurements. In Proceedings of the 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Mauritius, 7–8 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Sittón-Candanedo, I.; Alonso, R.S.; Corchado, J.M.; Rodríguez-González, S.; Casado-Vara, R. A review of edge computing reference architectures and a new global edge proposal. Future Gener. Comput. Syst. 2019, 99, 278–294. [Google Scholar] [CrossRef]
- Dilley, J.; Maggs, B.; Parikh, J.; Prokop, H.; Sitaraman, R.; Weihl, B. Globally distributed content delivery. IEEE Internet Comput. 2002, 6, 50–58. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Liang, F.; He, X.; Hatcher, W.G.; Lu, C.; Lin, J.; Yang, X. A Survey on the Edge Computing for the Internet of Things. IEEE Access 2018, 6, 6900–6919. [Google Scholar] [CrossRef]
- Parikh, S.; Dave, D.; Patel, R.; Doshi, N. Security and Privacy Issues in Cloud, Fog and Edge Computing. Procedia Comput. Sci. 2019, 160, 734–739. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Rao, R.; Savsani, V.; Vakharia, D. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput.-Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Cheraghalipour, A.; Hajiaghaei-Keshteli, M.; Paydar, M.M. Tree Growth Algorithm (TGA): A novel approach for solving optimization problems. Eng. Appl. Artif. Intell. 2018, 72, 393–414. [Google Scholar] [CrossRef]
- Pierezan, J.; Dos Santos Coelho, L. Coyote Optimization Algorithm: A New Metaheuristic for Global Optimization Problems. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Zhao, W.; Wang, L.; Zhang, Z. Supply-Demand-Based Optimization: A Novel Economics-Inspired Algorithm for Global Optimization. IEEE Access 2019, 7, 73182–73206. [Google Scholar] [CrossRef]
- Ismaeel, A.A.K.; Elshaarawy, I.A.; Houssein, E.H.; Ismail, F.H.; Hassanien, A.E. Enhanced Elephant Herding Optimization for Global Optimization. IEEE Access 2019, 7, 34738–34752. [Google Scholar] [CrossRef]
- Jain, M.; Singh, V.; Rani, A. A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 2019, 44, 148–175. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Dehghani, M.; Samet, H. Momentum search algorithm: A new meta-heuristic optimization algorithm inspired by momentum conservation law. SN Appl. Sci. 2020, 2, 1720. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Wan, J.; Celesti, A.; Li, D.; Abbas, H.; Zhang, Q. Edge Computing in IoT-Based Manufacturing. IEEE Commun. Mag. 2018, 56, 103–109. [Google Scholar] [CrossRef]
- Caria, M.; Schudrowitz, J.; Jukan, A.; Kemper, N. Smart farm computing systems for animal welfare monitoring. In Proceedings of the 2017 40th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 22–26 May 2017; pp. 152–157. [Google Scholar] [CrossRef]
- Xu, R.; Nikouei, S.Y.; Chen, Y.; Polunchenko, A.; Song, S.; Deng, C.; Faughnan, T.R. Real-Time Human Objects Tracking for Smart Surveillance at the Edge. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Miori, L.; Sanin, J.; Helmer, S. A Platform for Edge Computing Based on Raspberry Pi Clusters. In Data Analytics; Cali, A., Wood, P., Martin, N., Poulovassilis, A., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Zhang, X.; Ying, W.; Yang, P.; Sun, M. Parameter estimation of underwater impulsive noise with the Class B model. IET Radar Sonar Navig. 2020, 14, 1055–1060. [Google Scholar] [CrossRef]
- Georgiou, P.G.; Tsakalides, P.; Kyriakakis, C. Alpha-stable modeling of noise and robust time-delay estimation in the presence of impulsive noise. IEEE Trans. Multimed. 1999, 1, 291–301. [Google Scholar] [CrossRef] [Green Version]
- Pelekanakis, K.; Chitre, M. Adaptive sparse channel estimation under symmetric alpha-stable noise. IEEE Trans. Wirel. Commun. 2014, 13, 3183–3195. [Google Scholar] [CrossRef]
- Ma, Z.; Vandenbosch, G.A.E. Impact of Random Number Generators on the performance of particle swarm optimization in antenna design. In Proceedings of the 6th European Conference on Antennas and Propagation (EUCAP), Prague, Czech Republic, 26–30 March 2012; pp. 925–929. [Google Scholar] [CrossRef]
- Koeune, F. Pseudo-random number generator. In Encyclopedia of Cryptography and Security; Van Tilborg, H.C.A., Ed.; Springer: Boston, MA, USA, 2005; pp. 485–487. [Google Scholar] [CrossRef]
- Yuan, X.; Zhao, J.; Yang, Y.; Wang, Y. Hybrid parallel chaos optimization algorithm with harmony search algorithm. Appl. Soft Comput. 2014, 17, 12–22. [Google Scholar] [CrossRef]
- Yang, X.S. Chapter 9—Cuckoo Search. In Nature-Inspired Optimization Algorithms; Yang, X.S., Ed.; Elsevier: Oxford, UK, 2014; pp. 129–139. [Google Scholar] [CrossRef]
- Kazimipour, B.; Li, X.; Qin, A.K. A review of population initialization techniques for evolutionary algorithms. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 2585–2592. [Google Scholar] [CrossRef]
- Jun, B.; Kocher, P. The Intel Random Number Generator; White Paper; Cryptography Research Inc.: San Francisco, CA, USA, 1999; Volume 27, pp. 1–8. [Google Scholar]
- Zhang, M.; Zhang, W.; Sun, Y. Chaotic co-evolutionary algorithm based on differential evolution and particle swarm optimization. In Proceedings of the 2009 IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 885–889. [Google Scholar] [CrossRef]
- Guerrero, J.L.; Berlanga, A.; Molina, J.M. Initialization Procedures for Multiobjective Evolutionary Approaches to the Segmentation Issue. In Hybrid Artificial Intelligent Systems; Corchado, E., Snášel, V., Abraham, A., Woźniak, M., Graña, M., Cho, S.B., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 452–463. [Google Scholar]
- Correia, S.D.; Fé, J.; Beko, M.; Tomic, S. Development of a Test-bench for Evaluating the Embedded Implementation of the Improved Elephant Herding Optimization Algorithm Applied to Energy-Based Acoustic Localization. Computers 2020, 9, 87. [Google Scholar] [CrossRef]
- Box, G.E.P.; Muller, M.E. A Note on the Generation of Random Normal Deviates. Ann. Math. Stat. 1958, 29, 610–611. [Google Scholar] [CrossRef]
- Mantegna, R.N. Fast, accurate algorithm for numerical simulation of Lévy stable stochastic processes. Phys. Rev. E 1994, 49, 4677–4683. [Google Scholar] [CrossRef]
- Dai, C.; Zhu, Y.; Chen, W. Seeker optimization algorithm. In International Conference on Computational and Information Science; Springer: Berlin/Heidelberg, Germany, 2006; pp. 167–176. [Google Scholar]
- Krishnanand, K.; Ghose, D. Glowworm swarm based optimization algorithm for multimodal functions with collective robotics applications. Multiagent Grid Syst. 2006, 2, 209–222. [Google Scholar] [CrossRef] [Green Version]
- Haddad, O.B.; Afshar, A.; Marino, M.A. Honey-bees mating optimization (HBMO) algorithm: A new heuristic approach for water resources optimization. Water Resour. Manag. 2006, 20, 661–680. [Google Scholar] [CrossRef]
- Chu, S.C.; Tsai, P.W.; Pan, J.S. Cat swarm optimization. In Pacific Rim International Conference on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2006; pp. 854–858. [Google Scholar]
- Mucherino, A.; Seref, O. Monkey search: A novel metaheuristic search for global optimization. AIP Conf. Proc. 2007, 953, 162–173. [Google Scholar]
- Hosseini, H.S. Problem solving by intelligent water drops. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 3226–3231. [Google Scholar]
- Atashpaz-Gargari, E.; Lucas, C. Imperialist competitive algorithm: An algorithm for optimization inspired by imperialistic competition. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 4661–4667. [Google Scholar]
- Simon, D. Biogeography-based optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Kadioglu, S.; Sellmann, M. Dialectic search. In International Conference on Principles and Practice of Constraint Programming; Springer: Berlin/Heidelberg, Germany, 2009; pp. 486–500. [Google Scholar]
- He, S.; Wu, Q.H.; Saunders, J. Group search optimizer: An optimization algorithm inspired by animal searching behavior. IEEE Trans. Evol. Comput. 2009, 13, 973–990. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Tamura, K.; Yasuda, K. Primary study of spiral dynamics inspired optimization. IEEJ Trans. Electr. Electron. Eng. 2011, 6, S98–S100. [Google Scholar] [CrossRef]
- Tan, Y.; Zhu, Y. Fireworks algorithm for optimization. In International Conference in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2010; pp. 355–364. [Google Scholar]
- Kaveh, A.; Talatahari, S. A novel heuristic optimization method: Charged system search. Acta Mech. 2010, 213, 267–289. [Google Scholar] [CrossRef]
- Yang, X.S. Firefly algorithms for multimodal optimization. In International Symposium on Stochastic Algorithms; Springer: Berlin/Heidelberg, Germany, 2009; pp. 169–178. [Google Scholar]
- Shah-Hosseini, H. Principal components analysis by the galaxy-based search algorithm: A novel metaheuristic for continuous optimisation. Int. J. Comput. Sci. Eng. 2011, 6, 132–140. [Google Scholar]
- Civicioglu, P. Transforming geocentric cartesian coordinates to geodetic coordinates by using differential search algorithm. Comput. Geosci. 2012, 46, 229–247. [Google Scholar] [CrossRef]
- Shi, Y. Brain storm optimization algorithm. In International Conference in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2011; pp. 303–309. [Google Scholar]
- Pan, W.T. A new fruit fly optimization algorithm: Taking the financial distress model as an example. Knowl.-Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Alatas, B. A novel chemistry based metaheuristic optimization method for mining of classification rules. Expert Syst. Appl. 2012, 39, 11080–11088. [Google Scholar] [CrossRef]
- Civicioglu, P. Artificial cooperative search algorithm for numerical optimization problems. Inf. Sci. 2013, 229, 58–76. [Google Scholar] [CrossRef]
- Duman, E.; Uysal, M.; Alkaya, A.F. Migrating Birds Optimization: A new metaheuristic approach and its performance on quadratic assignment problem. Inf. Sci. 2012, 217, 65–77. [Google Scholar] [CrossRef]
- Kaveh, A.; Khayatazad, M. A new meta-heuristic method: Ray optimization. Comput. Struct. 2012, 112, 283–294. [Google Scholar] [CrossRef]
- Sadollah, A.; Bahreininejad, A.; Eskandar, H.; Hamdi, M. Mine blast algorithm: A new population based algorithm for solving constrained engineering optimization problems. Appl. Soft Comput. 2013, 13, 2592–2612. [Google Scholar] [CrossRef]
- Hatamlou, A. Black hole: A new heuristic optimization approach for data clustering. Inf. Sci. 2013, 222, 175–184. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Kashan, A.H. League championship algorithm: A new algorithm for numerical function optimization. In Proceedings of the 2009 International Conference of Soft Computing and Pattern Recognition, Malacca, Malaysia, 4–7 December 2009; pp. 43–48. [Google Scholar]
- Kaveh, A.; Farhoudi, N. A new optimization method: Dolphin echolocation. Adv. Eng. Softw. 2013, 59, 53–70. [Google Scholar] [CrossRef]
- Cuevas, E.; Cienfuegos, M.; ZaldíVar, D.; Pérez-Cisneros, M. A swarm optimization algorithm inspired in the behavior of the social-spider. Expert Syst. Appl. 2013, 40, 6374–6384. [Google Scholar] [CrossRef] [Green Version]
- Kashan, A.H. A new metaheuristic for optimization: Optics inspired optimization (OIO). Comput. Oper. Res. 2015, 55, 99–125. [Google Scholar] [CrossRef]
- Doğan, B.; Ölmez, T. A new metaheuristic for numerical function optimization: Vortex Search algorithm. Inf. Sci. 2015, 293, 125–145. [Google Scholar] [CrossRef]
- Gandomi, A.H. Interior search algorithm (ISA): A novel approach for global optimization. ISA Trans. 2014, 53, 1168–1183. [Google Scholar] [CrossRef] [PubMed]
- Salimi, H. Stochastic fractal search: A powerful metaheuristic algorithm. Knowl.-Based Syst. 2015, 75, 1–18. [Google Scholar] [CrossRef]
- Bansal, J.C.; Sharma, H.; Jadon, S.S.; Clerc, M. Spider monkey optimization algorithm for numerical optimization. Memetic Comput. 2014, 6, 31–47. [Google Scholar] [CrossRef]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Zheng, Y.J. Water wave optimization: A new nature-inspired metaheuristic. Comput. Oper. Res. 2015, 55, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Liu, Y.; Gao, X.; Zhang, H. A new bio-inspired algorithm: Chicken swarm optimization. In International Conference in Swarm Intelligence; Springer: Cham, Switzerland, 2014; pp. 86–94. [Google Scholar]
- Kaveh, A.; Mahdavi, V.R. Colliding bodies optimization: A novel meta-heuristic method. Comput. Struct. 2014, 139, 18–27. [Google Scholar] [CrossRef]
- Cheng, M.Y.; Prayogo, D. Symbiotic organisms search: A new metaheuristic optimization algorithm. Comput. Struct. 2014, 139, 98–112. [Google Scholar] [CrossRef]
- Liang, Y.C.; Cuevas Juarez, J.R. A novel metaheuristic for continuous optimization problems: Virus optimization algorithm. Eng. Optim. 2016, 48, 73–93. [Google Scholar] [CrossRef]
- Baykasoğlu, A.; Akpinar, Ş. Weighted Superposition Attraction (WSA): A swarm intelligence algorithm for optimization problems—Part 1: Unconstrained optimization. Appl. Soft Comput. 2017, 56, 520–540. [Google Scholar] [CrossRef]
- Wang, G.G.; Deb, S.; Cui, Z. Monarch butterfly optimization. Neural Comput. Appl. 2015, 31, 1995–2014. [Google Scholar] [CrossRef] [Green Version]
- Shareef, H.; Ibrahim, A.A.; Mutlag, A.H. Lightning search algorithm. Appl. Soft Comput. 2015, 36, 315–333. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2015, 27, 1053–1073. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Khamehchi, E. Sperm whale algorithm: An effective metaheuristic algorithm for production optimization problems. J. Nat. Gas Sci. Eng. 2016, 29, 211–222. [Google Scholar] [CrossRef]
- Wang, G.G. Moth search algorithm: A bio-inspired metaheuristic algorithm for global optimization problems. Memetic Comput. 2016, 10, 151–164. [Google Scholar] [CrossRef]
- Askarzadeh, A. A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Jaddi, N.S.; Alvankarian, J.; Abdullah, S. Kidney-inspired algorithm for optimization problems. Commun. Nonlinear Sci. Numer. Simul. 2017, 42, 358–369. [Google Scholar] [CrossRef]
- Fausto, F.; Cuevas, E.; Valdivia, A.; González, A. A global optimization algorithm inspired in the behavior of selfish herds. Biosystems 2017, 160, 39–55. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras, A. A novel meta-heuristic optimization algorithm: Thermal exchange optimization. Adv. Eng. Softw. 2017, 110, 69–84. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Spotted hyena optimizer: A novel bio-inspired based metaheuristic technique for engineering applications. Adv. Eng. Softw. 2017, 114, 48–70. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimisation algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Shayanfar, H.; Gharehchopogh, F.S. Farmland fertility: A new metaheuristic algorithm for solving continuous optimization problems. Appl. Soft Comput. 2018, 71, 728–746. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Wang, G.G.; Deb, S.; Coelho, L.D.S. Earthworm optimisation algorithm: A bio-inspired metaheuristic algorithm for global optimisation problems. Int. J. Bio-Inspired Comput. 2018, 12, 1–22. [Google Scholar] [CrossRef]
- Wei, Z.; Huang, C.; Wang, X.; Han, T.; Li, Y. Nuclear reaction optimization: A novel and powerful physics-based algorithm for global optimization. IEEE Access 2019, 7, 66084–66109. [Google Scholar] [CrossRef]
- Moosavi, S.H.S.; Bardsiri, V.K. Poor and rich optimization algorithm: A new human-based and multi populations algorithm. Eng. Appl. Artif. Intell. 2019, 86, 165–181. [Google Scholar] [CrossRef]
- Abdullah, J.M.; Ahmed, T. Fitness dependent optimizer: Inspired by the bee swarming reproductive process. IEEE Access 2019, 7, 43473–43486. [Google Scholar] [CrossRef]
- Hayyolalam, V.; Kazem, A.A.P. Black widow optimization algorithm: A novel meta-heuristic approach for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2020, 87, 103249. [Google Scholar] [CrossRef]
- Yapici, H.; Cetinkaya, N. A new meta-heuristic optimizer: Pathfinder algorithm. Appl. Soft Comput. 2019, 78, 545–568. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl.-Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Kaveh, A.; Khanzadi, M.; Moghaddam, M.R. Billiards-inspired optimization algorithm; A new meta-heuristic method. Structures 2020, 27, 1722–1739. [Google Scholar] [CrossRef]
- Kaveh, A.; Eslamlou, A.D. Water strider algorithm: A new metaheuristic and applications. Structures 2020, 25, 520–541. [Google Scholar] [CrossRef]
- Fouad, M.M.; El-Desouky, A.I.; Al-Hajj, R.; El-Kenawy, E.S.M. Dynamic group-based cooperative optimization algorithm. IEEE Access 2020, 8, 148378–148403. [Google Scholar] [CrossRef]
- Kaur, S.; Awasthi, L.K.; Sangal, A.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine predators algorithm: A nature-inspired Metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Covic, N.; Lacevic, B. Wingsuit Flying Search—A Novel Global Optimization Algorithm. IEEE Access 2020, 8, 53883–53900. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2020, 51, 1531–1551. [Google Scholar] [CrossRef]










| Year | Acronym | (*) | (**) | Method (Reference) | |
|---|---|---|---|---|---|
| –1999 | 1995 | PSO | 61,839 | 2474 | Particle Swarm Optimization [9] |
| 1996 | ANT | 14,356 | 598 | Ant System [73] | |
| 2000–2009 | 2009 | CS | 5100 | 464 | Cuckoo Search via Lévy flights [16] |
| 2010–2014 | 2010 | BAT | 3753 | 375 | Bat Algorithm [17] |
| 2011 | TLBO | 2227 | 247 | Teaching–Learning-Based Optimization [62] | |
| 2014 | GWO | 4112 | 685 | Grey Wolf Optimizer [61] | |
| 2015–2020 | 2015 | MFO | 1167 | 233 | Moth–Flame Optimization Algorithm [63] |
| 2016 | WOA | 2227 | 557 | Whale Optimization Algorithm [64] | |
| 2017 | SSA | 894 | 298 | Salp Swarm Algorithm [65] | |
| 2018 | TGA | 45 | 23 | Tree Growth Algorithm [66] | |
| COA | 85 | 43 | Coyote Optimization Algorithm [67] | ||
| 2019 | SDO | 9 | 9 | Supply–Demand-Based Optimization [68] | |
| EEHO | 16 | 16 | Enhanced Elephant Herding Optimization [69] | ||
| 2020 | MSA | - | - | Momentum Search Algorithm [72] |
| Rasp. Pi 4 B | Rasp. Pi ZW | Rasp. Pi 3 | Rasp. Pi 2 | Rasp. Pi B | |
|---|---|---|---|---|---|
| SOC | BCM2711 | BCM2835 | BCM2837 | BCM2836 | BCM2835 |
| Core | Cortex-A72 [64-bit] | ARM1176JZF-S | Cortex-A53 [64-bit] | Cortex-A7 | ARM1176JZF-S |
| Cores | 4 | 1 | 4 | 4 | 1 |
| Clock | 1.5 GHz | 1 GHz | 1.2 GHz | 900 MHz | 700 MHz |
| RAM | 4 GB | 512 MB | 1 GB | 1 GB | 512 MB |
| Target Agents | Operator | Goal |
|---|---|---|
| for (Best Trees) | (12) | Exploitation |
| for (Competition Trees) | (13) | Exploration, exploitation |
| for , where (Remove Trees) | (14) | Exploration |
| for , where (Reproduction Trees) | (15) | Exploration, exploitation |
| Method | Sub-Groups | Random Variable Distributions | Exploitation/Exploration Balance over Iterations | Quality Evolution |
|---|---|---|---|---|
| CS | No ✗ | , , | Constant | Greedy |
| GWO | No ✗ | Variable | Elitist | |
| EEHO | Yes ✓ | Constant | Elitist | |
| MFO | No ✗ | Variable | Elitist | |
| WOA | No ✗ | Variable | Elitist | |
| SSA | No ✗ | Variable | Elitist | |
| TGA | No ✗ | Constant | Elitist | |
| COA | Yes ✓ | Constant | Elitist | |
| SDO | No ✗ | Variable | Greedy | |
| MSA | No ✗ | Variable | Elitist |
| Search Space | 50 m × 50 m |
| P | 5 |
| 1 | |
| 2 | |
| Noise Variance | (dB) |
| Number of Sensors |
| Population Size () | No. of Groups () | Groups Size () | Specific Parameters | ||
|---|---|---|---|---|---|
| CS | 25 | n.a. | n.a. | , i.e., 50 | |
| GWO | 30 | n.a. | n.a. | , i.e., 30 | n.a. |
| EEHO | 120 | , i.e., 120 | |||
| MFO | 30 | n.a. | n.a. | , i.e., 30 | |
| WOA | 30 | n.a. | n.a. | , i.e., 30 | |
| SSA | 30 | n.a. | n.a. | , i.e., 30 | n.a. |
| TGA | 100 | n.a. | n.a. | , i.e., 150 | |
| COA | 100 | 20 | 5 | , i.e., 25 | |
| SDO | 50 | n.a. | n.a. | , i.e., 50 | n.a. |
| MSA | 60 | n.a. | n.a. | , i.e., 60 |
| dB | dB | dB | dB | dB | dB | |
|---|---|---|---|---|---|---|
| 0.083 | 0.134 | 0.222 | 0.394 | 0.798 | 2.844 | |
| 0.056 | 0.076 | 0.130 | 0.204 | 0.402 | 1.980 | |
| 0.051 | 0.078 | 0.100 | 0.161 | 0.328 | 0.533 | |
| 0.048 | 0.062 | 0.086 | 0.140 | 0.215 | 0.476 |
| Rasp. Pi B | 1999 | 2983 | 4032 | 5057 |
| Rasp. Pi ZW | 1347 | 2013 | 2719 | 3404 |
| Rasp. Pi 2 | 946 | 1411 | 1895 | 2368 |
| Rasp. Pi 3 | 589 | 880 | 1171 | 1477 |
| Rasp. Pi 4 B | 241 | 358 | 477 | 595 |
| Rasp. Pi B | CS | ||||
| GWO | |||||
| EEHO | |||||
| MFO | |||||
| WOA | |||||
| SSA | |||||
| TGA | |||||
| COA | |||||
| SDO | |||||
| MSA | |||||
| Rasp. Pi ZW | CS | ||||
| GWO | |||||
| EEHO | |||||
| MFO | |||||
| WOA | |||||
| SSA | |||||
| TGA | |||||
| COA | |||||
| SDO | |||||
| MSA | |||||
| Rasp. Pi 2 | CS | ||||
| GWO | |||||
| EEHO | |||||
| MFO | |||||
| WOA | |||||
| SSA | |||||
| TGA | |||||
| COA | |||||
| SDO | |||||
| MSA | |||||
| Rasp. Pi 3 | CS | ||||
| GWO | |||||
| EEHO | |||||
| MFO | |||||
| WOA | |||||
| SSA | |||||
| TGA | |||||
| COA | |||||
| SDO | |||||
| MSA | |||||
| Rasp. Pi 4 B | CS | ||||
| GWO | |||||
| EEHO | |||||
| MFO | |||||
| WOA | |||||
| SSA | |||||
| TGA | |||||
| COA | |||||
| SDO | |||||
| MSA | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fé, J.; Correia, S.D.; Tomic, S.; Beko, M. Swarm Optimization for Energy-Based Acoustic Source Localization: A Comprehensive Study. Sensors 2022, 22, 1894. https://doi.org/10.3390/s22051894
Fé J, Correia SD, Tomic S, Beko M. Swarm Optimization for Energy-Based Acoustic Source Localization: A Comprehensive Study. Sensors. 2022; 22(5):1894. https://doi.org/10.3390/s22051894
Chicago/Turabian StyleFé, João, Sérgio D. Correia, Slavisa Tomic, and Marko Beko. 2022. "Swarm Optimization for Energy-Based Acoustic Source Localization: A Comprehensive Study" Sensors 22, no. 5: 1894. https://doi.org/10.3390/s22051894
APA StyleFé, J., Correia, S. D., Tomic, S., & Beko, M. (2022). Swarm Optimization for Energy-Based Acoustic Source Localization: A Comprehensive Study. Sensors, 22(5), 1894. https://doi.org/10.3390/s22051894