
Enhancement and Optimization of Underwater Images and Videos Mapping



Abstract
:1. Introduction
- An accurate and high-speed background light estimation method is proposed, which is not only suitable for distinct types of underwater images but also for low complexity. The proposed method is time-saving and adaptable for most underwater images.
- TM estimation with an improved optimizer is established. Integrating the compensation of the scene-depth map based on color attenuation prior (CAP) and the adaptive saturation map (ASM), an optimizer is designed to modify and refine the coarse TM. The proposed TM estimation method provides more accurate results and has lower complexity in different kinds of underwater images than other advanced models.
- An improved white balance (WB) algorithm is employed to improve the color cast and visibility for restored images. The gain factor is adaptively selected related to the restored underwater image intensity to avoid over- or under-correction.
2. Related Works
2.1. Underwater Image Formation Model
2.2. Underwater Image Restoration Based on the DCP
3. Problem Formulation
3.1. Background Light Estimation
3.2. TM Optimizer Design
3.3. Color Correction
4. Results and Evaluation
4.1. Evaluation of Objectives and Approaches
- (1)
- To prove the effectiveness of the TM optimizer;
- (2)
- To prove the comprehensive performance of the proposed method;
- (3)
- To test the real-time performance of underwater video.
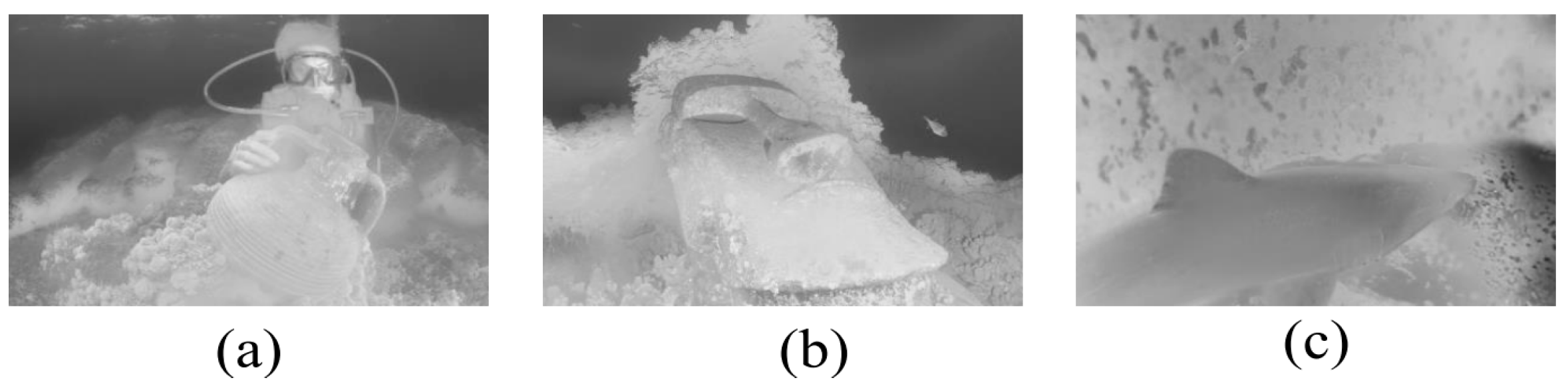
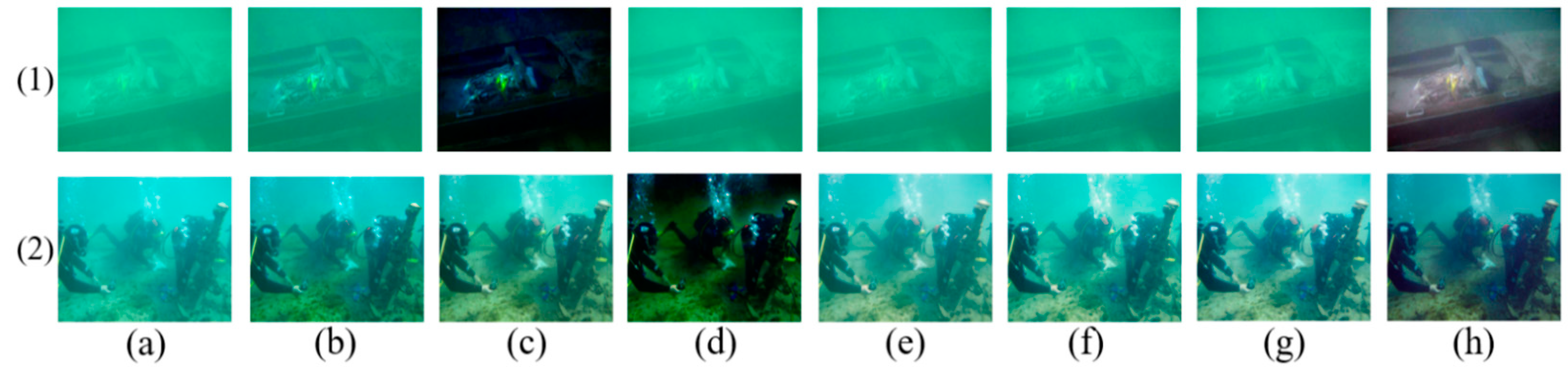
4.2. Performance of Transmission Map Optimizer for Single Underwater Image
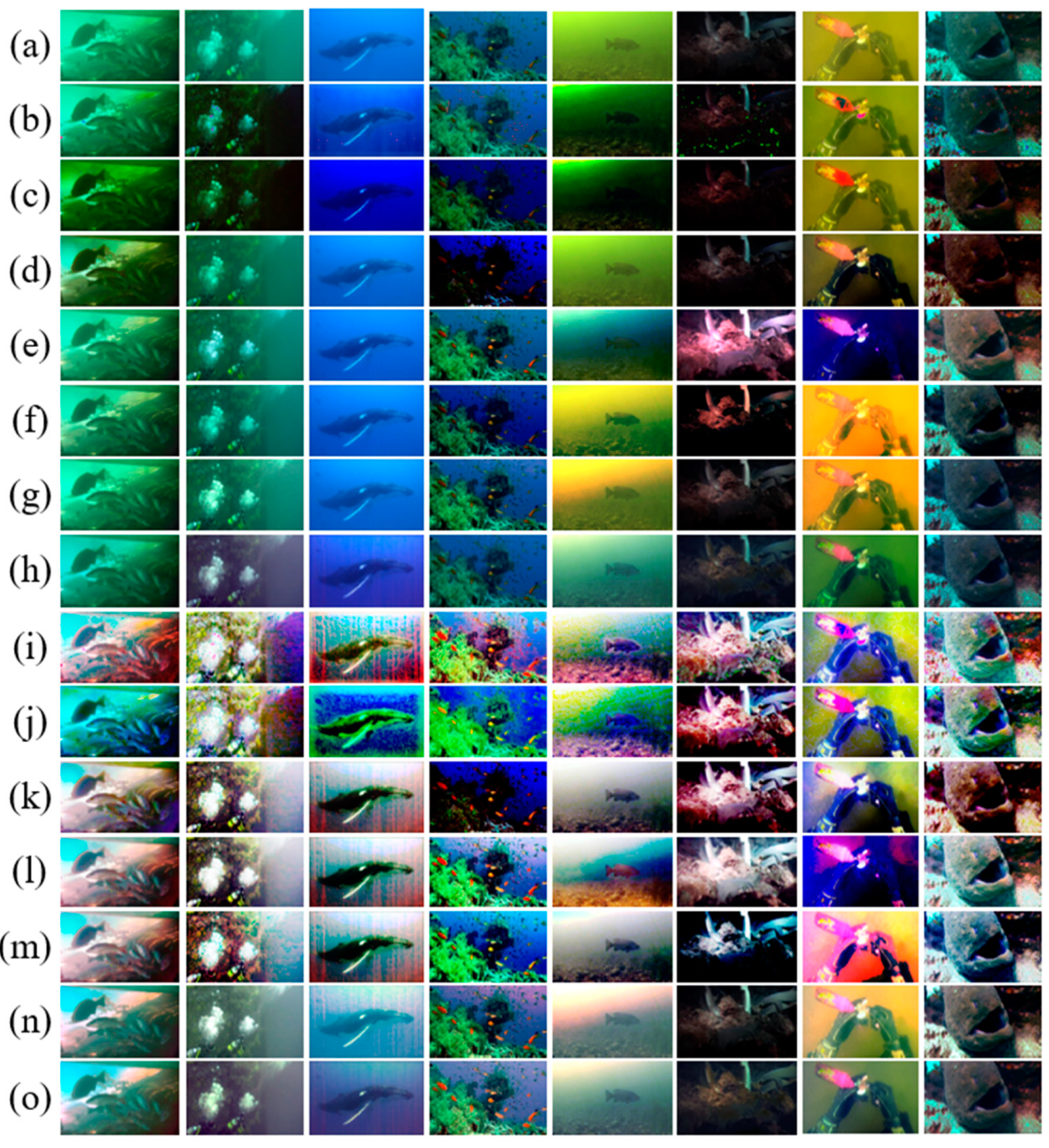
4.3. Comprehensive Performance for Single Underwater Image
4.4. Enhancement for Underwater Video
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DCP | dark channel prior |
| BL | background lights |
| TM | transmission map |
| ASM | adaptive saturation map |
| IFM | image formation model |
| ROV | remotely operated vehicles |
| AUV | autonomous underwater vehicles |
| CAP | color attenuation prior |
| AL | artificial light |
| WB | white balance |
| MIP | maximum intensity prior |
| UDCP | underwater dark channel prior |
| IBLA | image blurriness and light absorption |
| ULAP | underwater light attenuation prior |
| NUDCP | new underwater dark channel prior |
| PSNR | peak signal-to-noise ratio |
| SSIM | structural similarity |
| UIQM | underwater image-quality measure |
| BRISQUE | blind referenceless image spatial-quality evaluator |
| HE | histogram equalization |
| NU_CC | NUDCP with color correction |
| O_WCC | our method without color correction |
References
- Bae, I.; Hong, J. Survey on the Developments of Unmanned Marine Vehicles: Intelligence and Cooperation. Sensors 2023, 23, 4643. [Google Scholar] [CrossRef]
- Kazemzadeh, F.; Haider, S.A.; Scharfenberger, C.; Wong, A.; Clausi, D.A. Multispectral stereoscopic imaging device: Simultaneous multiview imaging from the visible to the near-infrared. IEEE Trans. Instrum. Meas. 2014, 63, 1871–1873. [Google Scholar] [CrossRef]
- Han, M.; Lyu, Z.; Qiu, T.; Xu, M. A review on intelligence dehazing and color restoration for underwater images. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 1820–1832. [Google Scholar] [CrossRef]
- Shahani, K.; Song, H.; Mehdi, S.R.; Sharma, A.; Tunio, G.; Qureshi, J.; Khaskheli, N. Design and testing of an underwater microscope with variable objective lens for the study of benthic communities. J. Mar. Sci. Appl. 2021, 20, 170–178. [Google Scholar] [CrossRef]
- Pan, H.; Lan, J.; Wang, H.; Li, Y.; Zhang, M.; Ma, M.; Zhang, D.; Zhao, X. UWV-Yolox: A Deep Learning Model for Underwater Video Object Detection. Sensors 2023, 23, 4859. [Google Scholar] [CrossRef]
- Zhu, D. Underwater Image Enhancement Based on the Improved Algorithm of Dark Channel. Mathematics 2023, 11, 1382. [Google Scholar] [CrossRef]
- Park, E.; Sim, J.Y. Underwater image restoration using geodesic color distance and complete image formation model. IEEE Access 2020, 8, 157918–157930. [Google Scholar] [CrossRef]
- Wu, Z.; Ji, Y.; Song, L.; Sun, J. Underwater Image Enhancement Based on Color Correction and Detail Enhancement. J. Mar. Sci. Eng. 2022, 10, 1513. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar] [PubMed]
- Chao, L.; Wang, M. April. Removal of water scattering. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–19 April 2010; IEEE: New York, NY, USA, 2010; Volume 2, pp. V2–V35. [Google Scholar]
- Drews, P.; Nascimento, E.; Moraes, F.; Botelho, S.; Campos, M. Transmission estimation in underwater single images. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 2–8 December 2013; pp. 825–830. [Google Scholar]
- Galdran, A.; Pardo, D.; Picón, A.; Alvarez-Gila, A. Automatic red-channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef] [Green Version]
- Peng, Y.T.; Cosman, P.C. Underwater image restoration based on image blurriness and light absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef]
- Song, W.; Wang, Y.; Huang, D.; Liotta, A.; Perra, C. Enhancement of underwater images with statistical model of background light and optimization of transmission map. IEEE Trans. Broadcast. 2020, 66, 153–169. [Google Scholar] [CrossRef] [Green Version]
- Liang, Z.; Ding, X.; Wang, Y.; Yan, X.; Fu, X. Gudcp: Generalization of underwater dark channel prior for underwater image restoration. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 4879–4884. [Google Scholar] [CrossRef]
- Yu, K.; Cheng, Y.; Li, L.; Zhang, K.; Liu, Y.; Liu, Y. Underwater Image Restoration via DCP and Yin–Yang Pair Optimization. J. Mar. Sci. Eng. 2022, 10, 360. [Google Scholar] [CrossRef]
- Guo, Q.; Xue, L.; Tang, R.; Guo, L. Underwater image enhancement based on the dark channel prior and attenuation compensation. J. Ocean Univ. China 2021, 16, 757–765. [Google Scholar] [CrossRef]
- Yu, H.; Li, X.; Lou, Q.; Lei, C.; Liu, Z. Underwater image enhancement based on DCP and depth transmission map. Multimed. Tools Appl. 2020, 79, 20373–20390. [Google Scholar] [CrossRef]
- Zhu, Q.; Mai, J.; Shao, L. A fast single image haze removal algorithm using color attenuation prior. IEEE Trans. Image Process. 2015, 24, 3522–3533. [Google Scholar]
- Yang, M.; Sowmya, A.; Wei, Z.; Zheng, B. Offshore underwater image restoration using reflection-decomposition-based transmission map estimation. IEEE J. Ocean. Eng. 2019, 45, 521–533. [Google Scholar] [CrossRef]
- Li, X.; Lei, C.; Yu, H.; Feng, Y. Underwater image restoration by color compensation and color-line model. Signal Process. Image Commun. 2022, 101, 116569. [Google Scholar] [CrossRef]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.K.; Wong, S.; Tao, D. An underwater image enhancement benchmark dataset and beyond. IEEE Trans. Image Process. 2019, 29, 4376–4389. [Google Scholar] [CrossRef] [Green Version]
- Carlevaris-Bianco, N.; Mohan, A.; Eustice, R.M. Initial results in underwater single image dehazing. In Proceedings of the Oceans 2010 Mts/IEEE Seattle, Washington, DC, USA, 20–23 September 2010; IEEE: New York, NY, USA, 2010; pp. 1–8. [Google Scholar]
- Song, W.; Wang, Y.; Huang, D.; Tjondronegoro, D. A rapid scene depth estimation model based on underwater light attenuation prior for underwater image restoration. In Proceedings of the Pacific Rim Conference on Multimedia, Hefei, China, 21–22 September 2018; Springer: Cham, Switzerland, 2018; pp. 678–688. [Google Scholar]
- Anwar, S.; Li, C. Diving deeper into underwater image enhancement: A survey. Signal Process. Image Commun. 2020, 89, 115978. [Google Scholar] [CrossRef]
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-reference image quality assessment in the spatial domain. IEEE Trans. Image Process. 2012, 21, 4695–4708. [Google Scholar] [CrossRef] [PubMed]
- Monterroso Muñoz, A.; Moron-Fernández, M.-J.; Cascado-Caballero, D.; Diaz-del-Rio, F.; Real, P. Autonomous Underwater Vehicles: Identifying Critical Issues and Future Perspectives in Image Acquisition. Sensors 2023, 23, 4986. [Google Scholar] [CrossRef]
- Hu, K.; Wang, T.; Shen, C.; Weng, C.; Zhou, F.; Xia, M.; Weng, L. Overview of Underwater 3D Reconstruction Technology Based on Optical Images. J. Mar. Sci. Eng. 2023, 11, 949. [Google Scholar] [CrossRef]
- Wang, R.; Wang, S.; Wang, Y.; Cai, M.; Tan, M. Vision-based autonomous hovering for the biomimetic underwater robot—RobCutt-II. IEEE Trans. Ind. Electron. 2018, 66, 8578–8588. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Indexes | |||
|---|---|---|---|---|
| PSNR | SSIM | UIQM | BRISQUE | |
| DCP | 15.65 | 0.652 | 0.78 | 49.56 |
| UDCP | 17.66 | 0.251 | 0.35 | 44.56 |
| MIP | 18.53 | 0.734 | 1.21 | 44.27 |
| IBLA | 22.59 | 0.762 | 1.17 | 42.88 |
| ULAP | 23.96 | 0.759 | 1.27 | 41.18 |
| NUDCP | 25.54 | 0.763 | 1.29 | 42.57 |
| Ours | 28.63 | 0.896 | 1.72 | 39.32 |
| Methods | Indexes | |||
|---|---|---|---|---|
| PSNR | SSIM | UIQM | BRISQUE | |
| DCP | 18.32 | 0.676 | 1.31 | 18.73 |
| UDCP | 16.81 | 0.314 | 0.77 | 19.08 |
| MIP | 15.45 | 0.815 | 1.68 | 25.45 |
| IBLA | 23.57 | 0.786 | 1.59 | 15.37 |
| ULAP | 25.05 | 0.763 | 1.49 | 15.06 |
| NUDCP | 25.19 | 0.825 | 1.61 | 16.34 |
| Ours | 27.99 | 0.852 | 1.46 | 14.65 |
| Methods | Indexes | |||
|---|---|---|---|---|
| PSNR | SSIM | UIQM | BRISQUE | |
| DCP | 16.15 | 0.354 | 0.73 | 61.81 |
| UDCP | 17.06 | 0.237 | 0.82 | 58.92 |
| MIP | 19.95 | 0.058 | 0.59 | 57.25 |
| IBLA | 23.09 | 0.501 | 1.19 | 53.35 |
| ULAP | 24.05 | 0.297 | 0.87 | 55.69 |
| NUDCP | 27.02 | 0.401 | 1.07 | 54.32 |
| Ours | 28.24 | 0.651 | 1.31 | 52.81 |
| Methods | Indexes | |||
|---|---|---|---|---|
| PSNR | SSIM | UIQM | BRISQUE | |
| DCP | 18.28 | 0.575 | 1.09 | 45.62 |
| UDCP | 16.71 | 0.548 | 1.09 | 42.38 |
| MIP | 20.01 | 0.609 | 1.14 | 42.83 |
| IBLA | 24.43 | 0.628 | 1.19 | 39.53 |
| ULAP | 26.24 | 0.611 | 1.14 | 39.58 |
| NUDCP | 28.58 | 0.625 | 1.22 | 39.95 |
| Ours | 28.99 | 0.736 | 1.41 | 38.62 |
| Methods | Indexes | |||
|---|---|---|---|---|
| PSNR | SSIM | UIQM | BRISQUE | |
| DCP | 18.86 | 0.37 | 0.99 | 45.33 |
| UDCP | 17.79 | 0.39 | 0.82 | 43.91 |
| MIP | 20.81 | 0.52 | 1.02 | 38.89 |
| IBLA | 22.59 | 0.65 | 1.38 | 34.77 |
| NUDCP | 25.39 | 0.71 | 1.46 | 29.14 |
| O_WCC | 28.54 | 0.77 | 1.61 | 36.67 |
| DCP + HE | 19.08 | 0.41 | 1.58 | 38.96 |
| UDCP + HE | 19.43 | 0.49 | 1.63 | 38.91 |
| MIP + HE | 21.98 | 0.62 | 1.74 | 35.05 |
| IBLA + HE | 22.66 | 0.71 | 1.79 | 32.11 |
| ULAP + HE | 24.66 | 0.68 | 1.81 | 30.69 |
| NU_CC | 26.04 | 0.75 | 1.68 | 28.63 |
| Ours | 28.75 | 0.85 | 1.75 | 27.67 |
| Test Time (s) | TPF (ms) | FPS | |
|---|---|---|---|
| DCP | 975 | 982 | 1.0 |
| UDCP | 2169 | 723 | 1.4 |
| MIP | 4758 | 1586 | 0.6 |
| ULAP | 2016 | 672 | 1.5 |
| NUDCP | 1155 | 385 | 2.6 |
| Ours | 288 | 96 | 10.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Dong, X.; Wang, Y.; Wang, S. Enhancement and Optimization of Underwater Images and Videos Mapping. Sensors 2023, 23, 5708. https://doi.org/10.3390/s23125708
Li C, Dong X, Wang Y, Wang S. Enhancement and Optimization of Underwater Images and Videos Mapping. Sensors. 2023; 23(12):5708. https://doi.org/10.3390/s23125708
Chicago/Turabian StyleLi, Chengda, Xiang Dong, Yu Wang, and Shuo Wang. 2023. "Enhancement and Optimization of Underwater Images and Videos Mapping" Sensors 23, no. 12: 5708. https://doi.org/10.3390/s23125708
APA StyleLi, C., Dong, X., Wang, Y., & Wang, S. (2023). Enhancement and Optimization of Underwater Images and Videos Mapping. Sensors, 23(12), 5708. https://doi.org/10.3390/s23125708