
Note on Coarse Alignment of Gyro-Free Inertial Navigation System



Abstract
:1. Introduction
2. Coarse Alignment of INS
2.1. Leveling
2.2. Gyrocompassing
3. Coarse Alignment of GF-INS
3.1. Roll and Pitch
3.2. Heading
3.3. Accelerometer Configuration and Possiblity of Initial Heading Calculation
3.4. Initial Heading Error of Generic INS
3.5. Initial Heading Error of GF-INS
4. Coarse Alignment of GF-INS with Gyroscope
5. Concluding Remarks and Further Studies
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Electrical Engineers: Piscataway, NJ, USA, 2004; pp. 17–301. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multi Sensor Integrated Navigation Systems, 2nd ed.; Artech House: London, UK, 2013; pp. 15–160. [Google Scholar]
- Pitman, G.R. Inertial Guidance; John Wiley & Sons Inc: New York, NY, USA; Hoboken, NJ, USA, 1962; pp. 47–206. [Google Scholar]
- Bar-Itzhack, I.Y.; Berman, N. Control Theoretic Approach to Inertial Navigation Systems. AIAA J. Guid. Control. Dyn. 1998, 11, 237–245. [Google Scholar] [CrossRef]
- Britting, K.R. Inertial Navigation Systems Analysis; John Wiley & Sons Inc: New York, NY, USA; Hoboken, NJ, USA, 1971; pp. 153–209. [Google Scholar]
- Schuler, A.R.; Grammatikos, A.; Fegley, K.A. Measuring Rotational Motion with Linear Accelerometers. IEEE Trans. Aerosp. Electron. Syst. 1967, AES-3, 465–472. [Google Scholar] [CrossRef]
- Nusbaum, U.; Klein, I. Control Theoretic Approach to Gyro-Free Inertial Navigation Systems. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 168–170. [Google Scholar] [CrossRef]
- Pachter, M.; Welker, T.C.; Huffman, R.E. Gyro free INS theory. J. Inst. Navig. 2013, 60, 85–96. [Google Scholar] [CrossRef]
- Vaknin, E.; Klein, I. Coarse leveling of gyro-free INS. J. Gyroscopy Navig. 2016, 7, 145–151. [Google Scholar] [CrossRef]
- Chen, J.-H.; Lee, S.-C.; Debra, D.B. Gyroscope Free Strapdown Inertial Measurement Unit by Six Linear Accelerometers. J. Guid. Control. Dyn. 1994, 17, 286–290. [Google Scholar] [CrossRef]
- Padgaonkar, A.J.; Krieger, K.W.; King, A.I. Measurement of Angular Acceleration of a Rigid Body Using Linear Accelerometers. J. Appl. Mech. 1975, 42, 552–556. [Google Scholar] [CrossRef] [Green Version]
- Park, S.; Tan, C.W.; Park, S. A scheme for improving the performance of a gyroscope-free inertial measurement unit. Sens. Actuators A: Phys. 2005, 121, 410–420. [Google Scholar] [CrossRef]
- Fangjun, Q.; Xu, J.; Sai, J. A New Scheme of Gyroscope Free Inertial Navigation System Using 9 Accelerometers. In Proceedings of the 2009 International Workshop on Intelligent Systems and Applications, Wuhan, China, 23–24 May 2009. [Google Scholar]
- Shi, Z.; Cheng, Z.; Yang, J. Study of Independent Initial Alignment Based on Gyroscope Free Strapdown Inertial Navigation System. In Proceedings of the 2010 Chinese Control and Decision Conference, Xuzhou, China, 26–28 May 2010; pp. 2198–2202. [Google Scholar]
- Edwan, E.; Knedlik, S.; Loffeld, O. Constrained Angular Motion Estimation in a Gyro-Free IMU. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 596–610. [Google Scholar] [CrossRef]
- Wang, X.; Xiao, L. Gyroscope-reduced inertial navigation system for flight vehicle motion estimation. Adv. Space Res. 2017, 59, 413–424. [Google Scholar] [CrossRef]
- Santiago, A.A. Extended Kalman Filtering Applied to a Full Accelerometer Strapdown Inertial Measurement Unit. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, September 1992. [Google Scholar]
- Farrell, J.A. Aided Navigation—GPS with High Rate Sensors; McGrawHill: New York, NY, USA, 2008; pp. 416–421. [Google Scholar]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation Satellite-Based Positioning and Their Integration; Springer: New York, NY, USA, 2013; pp. 163–166. [Google Scholar]
- Kayton, M.; Fried, W.R. Avionics Navigation Systems, 2nd ed.; John Wiley & Sons Inc: New York, NY, USA, 1997; pp. 382–386. [Google Scholar]
- Yeon, F.-J. Error Analysis of Analytic Coarse Alignment Methods. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 334–337. [Google Scholar] [CrossRef]
- Silva, F.O. Generalized error analysis of analytical coarse alignment formulations for stationary SINS. Aerosp. Sci. Technol. 2018, 79, 500–505. [Google Scholar] [CrossRef]
- Honeywell. Q-FLEX QA-3000 ACCELEROMETER. Available online: https://aerospace.honeywell.com/us/en/products-and-services/product/hardware-and-systems/sensors/qa-3000-single-axis-quartz-accelerometer?utm_source=google&utm_medium=cpc&utm_campaign=23-aero-ww-dsa-products&utm_content=dyn-en-lp&gclid=EAIaIQobChMIw_z0z9Om_wIV18SWCh0cnwx8EAAYASAAEgKlDvD_BwE (accessed on 3 June 2023).
- Ménoret, V.; Vermeulen, P.; Moigne, N.L.; Bonvalot, S.; Bouyer, P.; Landragin, A.; Desruelle, B. Gravity measurements below 10−9 g with a transportable absolute quantum gravimeter. Sci. Rep. 2018, 8, 12300. [Google Scholar] [CrossRef] [PubMed]
- Honeywell. HG1700 Inertial Measurement Unit. Available online: https://aerospace.honeywell.com/us/en/products-and-services/product/hardware-and-systems/sensors/hg1700-inertial-measurement-unit (accessed on 3 June 2023).
- Honeywell. GG1320AN Digital Laser Gyro. Available online: https://aerospace.honeywell.com/us/en/products-and-services/product/hardware-and-systems/sensors/gg1320an-digital-ring-laser-gyroscope (accessed on 3 June 2023).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
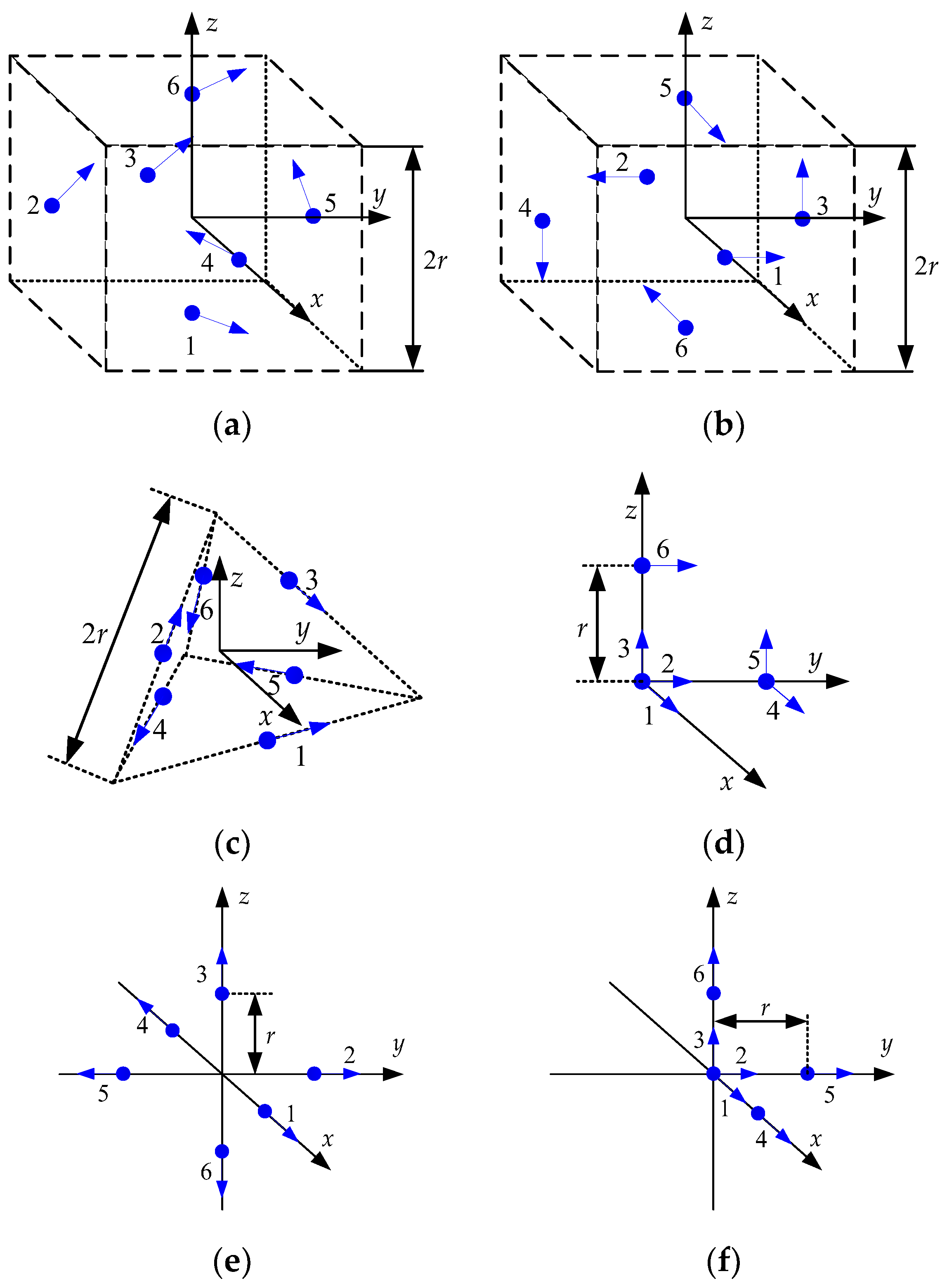
| Accelerometer Configuration | Number of Accelerometers | |
|---|---|---|
| Figure 1a [9,10,12] | 6 | 3 |
| Figure 1b [9] | 6 | 3 |
| Figure 1c [9] | 6 | 5 |
| Figure 1d [11] | 6 | 2 |
| Figure 1e [11] | 6 | 3 |
| Figure 1f [11] | 6 | 3 |
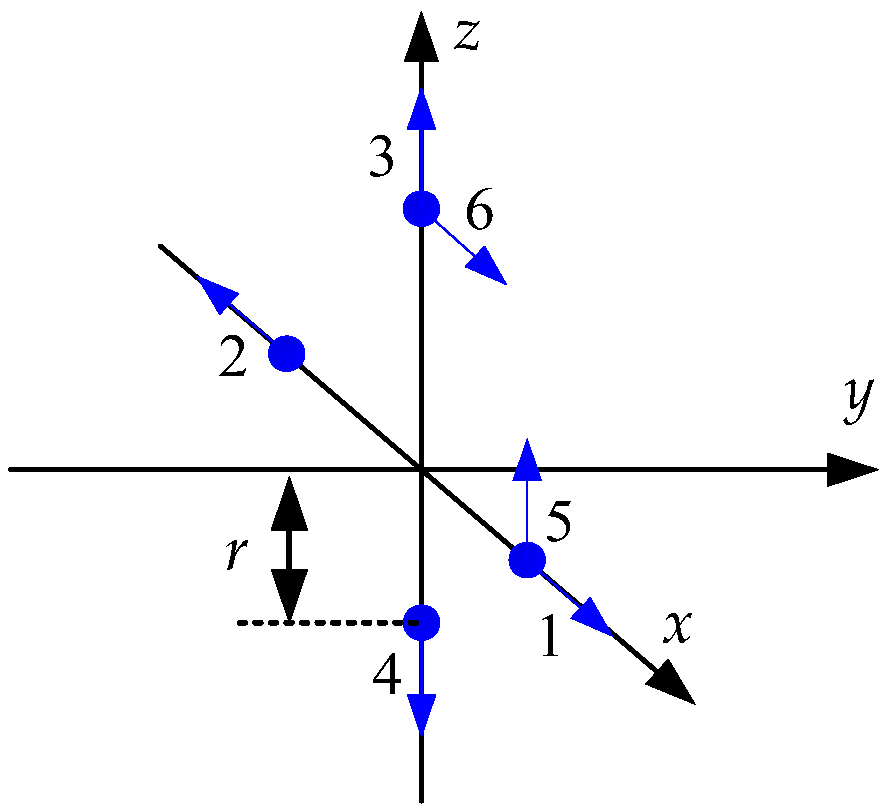
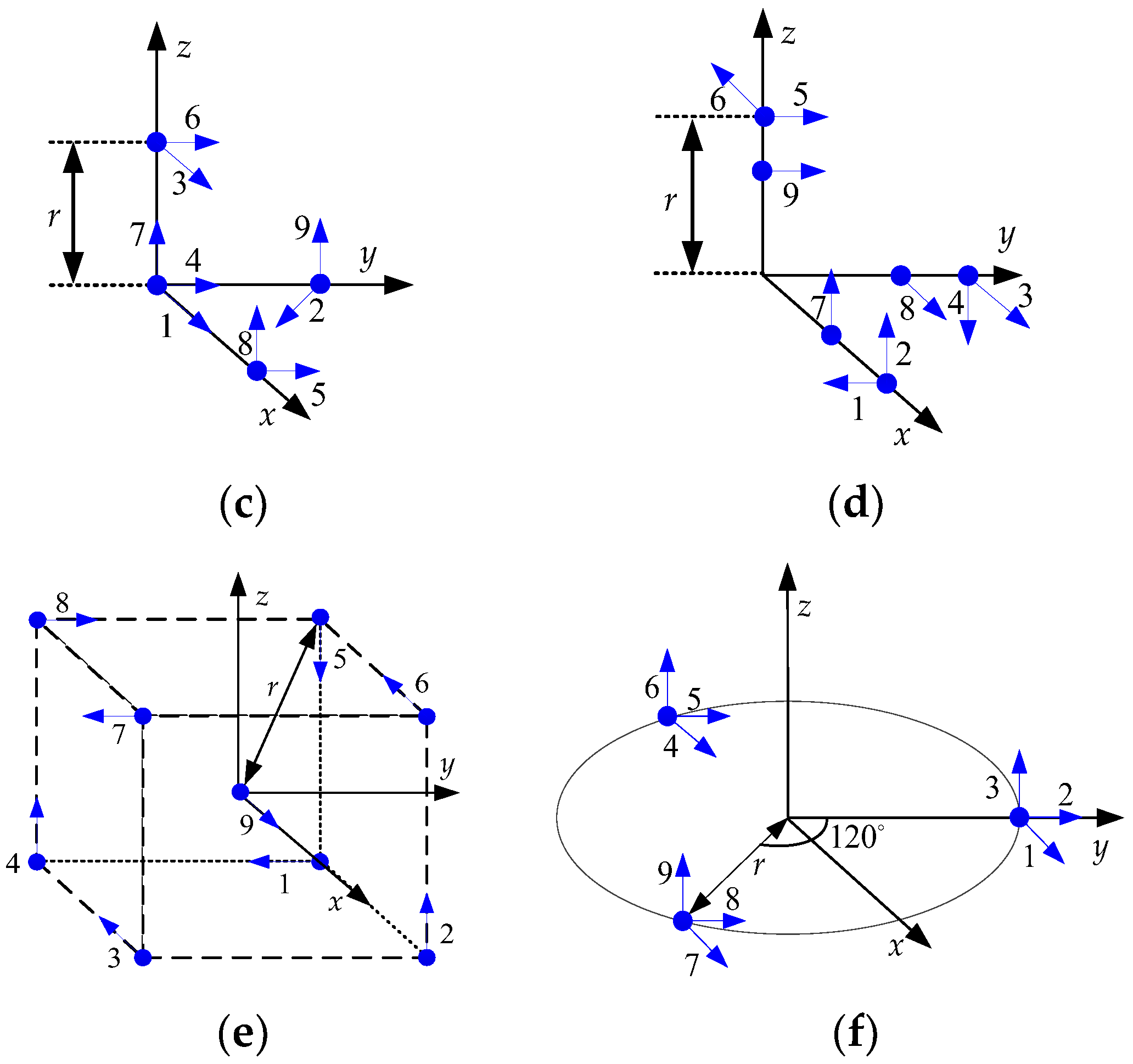
| Figure 2 [16] | 7 | 4 |
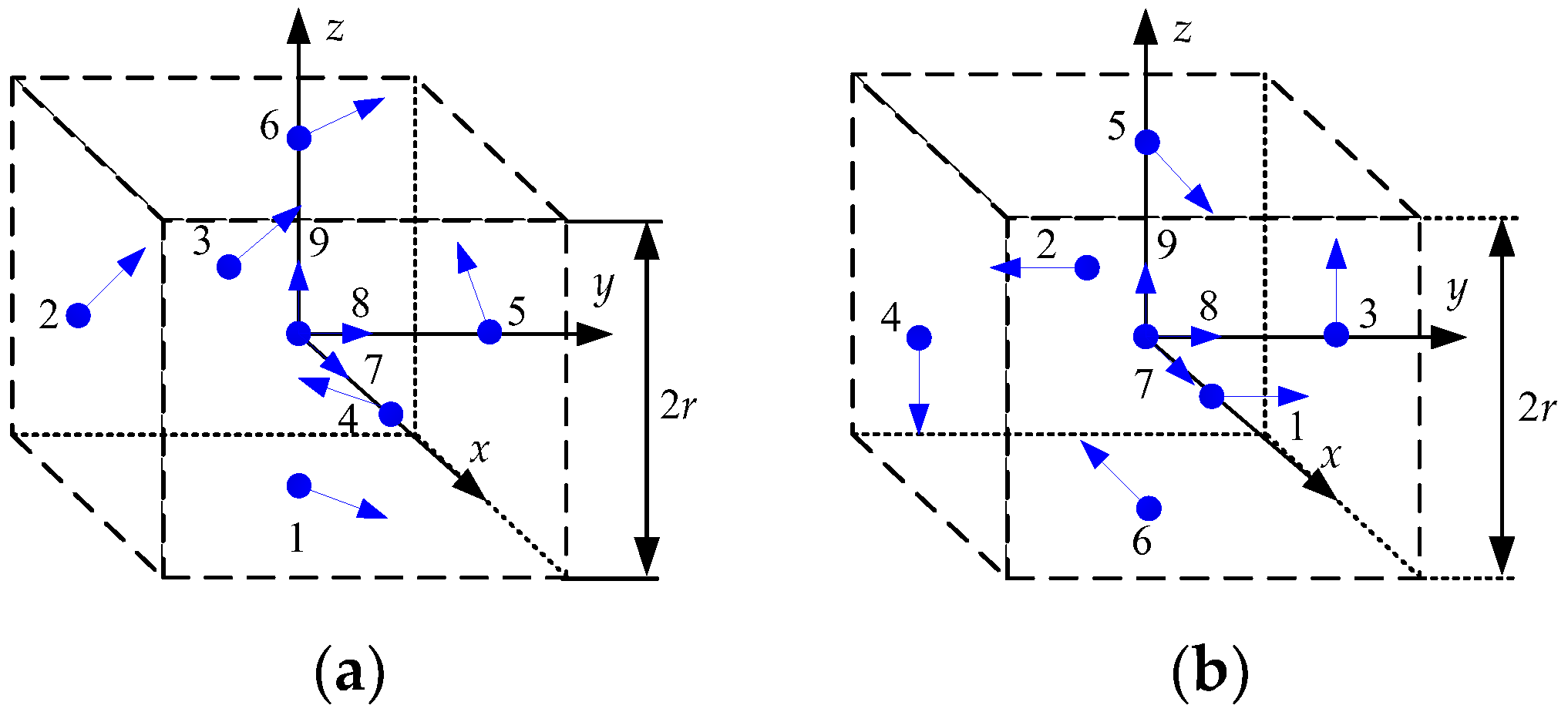
| Figure 3a [12] | 9 | 3 |
| Figure 3b [9] | 9 | 3 |
| Figure 3c [13,14] | 9 | 3 |
| Figure 3d [13] | 9 | 3 |
| Figure 3e [9] | 9 | 6 |
| Figure 3f [9] | 9 | 5 |
| Figure 4a [9,15] | 12 | 6 |
| Figure 4b [17] | 12 | 3 |
| Model Number | Manufacturer | Error Spec. (1 σ Bias) | Type |
|---|---|---|---|
| QA3000 | Honeywell Inc., USA | G (G = 9.8 m/s2) | Quartz Pendulum |
| Absolute Quantum Gravimeter | Muquans, France | G | Laser-Cooled Atom |
| Configuration | Figure 3e | Figure 4a | |
|---|---|---|---|
| Model Number | |||
| QA3000 | ° | ° | |
| Absolute Quantum Gravimeter | 95.51° | 74.67° | |
| Gyro Axis | |||
|---|---|---|---|
| Roll | |||
| Pitch | |||
| Yaw | |||
| Roll and Pitch | |||
| Roll and Yaw | |||
| Pitch and Yaw |
| Gyro Axis | ||||
|---|---|---|---|---|
| Roll | ||||
| Pitch | ||||
| Yaw | ||||
| Roll and Pitch | ||||
| Roll and Yaw | ||||
| Pitch and Yaw | ||||
| Gyro | Error Spec. (1 σ Bias) | Type |
|---|---|---|
| RLG in HG1700AG58 (Honeywell Inc., USA) | 1°/h | Tactical-Grade RLG |
| GG1320AN (Honeywell Inc., USA) | 0.003°/h | Navigation-Grade RLG |
| Gyro | RLG in HG1700AG58 | GG1320AN | |
|---|---|---|---|
| Accelerometer | |||
| QA3000 | 3.809° | 0.011° | |
| Absolute Quantum Gravimeter | 3.804° | 0.011° | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Son, J.-H.; Oh, S.-H.; Hwang, D.-H. Note on Coarse Alignment of Gyro-Free Inertial Navigation System. Sensors 2023, 23, 5763. https://doi.org/10.3390/s23125763
Kim H, Son J-H, Oh S-H, Hwang D-H. Note on Coarse Alignment of Gyro-Free Inertial Navigation System. Sensors. 2023; 23(12):5763. https://doi.org/10.3390/s23125763
Chicago/Turabian StyleKim, Heyone, Jae-Hoon Son, Sang-Heon Oh, and Dong-Hwan Hwang. 2023. "Note on Coarse Alignment of Gyro-Free Inertial Navigation System" Sensors 23, no. 12: 5763. https://doi.org/10.3390/s23125763
APA StyleKim, H., Son, J. -H., Oh, S. -H., & Hwang, D. -H. (2023). Note on Coarse Alignment of Gyro-Free Inertial Navigation System. Sensors, 23(12), 5763. https://doi.org/10.3390/s23125763