1. Introduction
Ranging Mode, known as R-Mode, is a maritime terrestrial radio navigation system currently under development [
1,
2,
3,
4,
5,
6,
7]. It is intended to reduce the dependence of today’s maritime transport on global navigation satellite systems (GNSS). Furthermore, as an alternative navigation system, it is intended to be available in case GNSS fails, as well as to increase the overall availability of positioning, navigation, and timing (PNT) information for maritime applications with higher demands on PNT continuity, availability, and integrity.
R-Mode is designed as a cost efficient extension of current maritime radio communication infrastructure. Land-based transmitters of that infrastructure are extended by highly accurate timing sources that enable the broadcast of R-Mode network-wide synchronized timing signals, thereby enabling range estimation between the transmitter and the mobile receivers. The reception of three R-Mode transmitting stations enables positioning and timing.
Currently, the implementation of R-Mode is under investigation on medium-frequency (MF) radio beacons [
1,
2,
4,
6], that broadcast differential GNSS corrections in coastal regions within distances of about 250 km from transmitters ashore as well as on base stations of the very high frequency data exchange system (VDES) [
7,
8,
9,
10], which is used for different maritime services such as dynamic and static ship information or ship route exchange. VDES and MF R-Mode work in different frequency bands, which causes a difference in the signal propagation. For VDES, the signals have to fulfil direct line-of-sight conditions in order for it to be used for positioning and timing. For MF, the main propagation path is a ground wave. This paper focuses on the MF component of R-Mode.
Initial theoretical analysis and measurements in different testbeds have demonstrated the feasibility of MF R-Mode as a backup for GNSS in the maritime domain [
1,
2,
4]. A positioning performance of 10 m could be achieved during daytime in areas with a nearly constant propagation path related to the composition of land and sea [
4]. During the night, the sky wave reduces performance for distant stations, which currently reduces the usability of signals to distances of about 70 km from MF R-Mode transmitters [
1]. Countermeasures that suppress the sky wave propagation path at night are under investigation.
To support ranging with the radio beacon transmission, two continuous wave (CW) aiding carriers are added next to the edges of the 500 Hz to 1 kHz wide channel of each radio beacon [
11] located in the maritime frequency band from 283.5 kHz to 325 kHz [
12]. Measuring the phase of both CW aiding carriers allows the ambiguities to be solved with the help of the beat signal (both carriers of one station) and the range to be estimated within the last incomplete wave length (about 0 to 1000 m). An essential basic requirement when transferring the phase information to the distance is exact knowledge of the signal propagation.
Medium-frequency R-Mode signals experience significant ground wave propagation delays caused by the finite ground conductivity and relative permittivity of the surface. As in the low-frequency-based LORAN-C and eLoran radio navigation systems, these delays are one of the most influential error sources in the system, and can cause a large systematic decrease in the horizontal positional accuracy of MF R-Mode.
To compensate for the effects of ground wave propagation and atmospheric delays, we developed a method to predict and correct the propagation delay of MF R-Mode signals, called the Atmospheric and Ground Wave Delay Factor (AGDF) [
13,
14]. This paper is the first detailed description and performance analysis of the approach.
The paper is organized as follows:
Section 2 describes the mathematical framework used for the calculation of ground wave propagation delays, while
Section 3 introduces the AGDF and explains how it is computed. In
Section 4, we present the results of a large-scale measurement campaign that was conducted in the Baltic Sea MF R-Mode testbed and evaluate the performance of the AGDF prediction with regard to the improvement of R-Mode ranging accuracy. Finally, in
Section 5 we discuss the results of the performance evaluation and provide an outlook of future activities that are planned or have been proposed for the improvement of the solution.
2. Ground Wave Propagation
In this section, we introduce the mathematical foundations upon which the calculation and prediction of ground wave propagation delays are based in the proposed AGDF approach for the MF R-Mode system.
The effect of ground wave propagation in the long- and medium-frequency band has been discussed extensively in the literature. Wait [
15] provided a detailed overview of the evolution of theories related to electromagnetic ground wave propagation. The attenuation of a wave travelling along the interface of the earth’s surface and the atmosphere is caused by the finite complex surface impedance, consisting of the dielectric permittivity
and the conductivity
of the ground. The term “attenuation” is a complex valued factor, involving the introduction of an amplitude damping and a phase delay in addition to the free space propagation loss of a wave. To obtain the AGDF for the MF R-Mode system, we want to derive a method to calculate the phase of the complex attenuation function.
A comprehensive description and discussion of the theoretical foundations and calculation methods of electromagnetic ground wave propagation can be found in [
16]. In brief, the electric field of a ground wave can be expressed by multiplying the vertical electric field in free space
in (
1) for a time-variant vertical electric dipole source of moment
where
is the angular frequency,
k is the wave number,
is the vacuum magnetic permeability, and
is the distance from the source, with an attenuation function
in
For relatively short distances with respect to the wavelength, the approach of modelling the earth as a plane surface according to [
17,
18] can be applied to calculate the electric field of a ground wave within a certain margin of accuracy. The resulting attenuation function
can be calculated through
where
and the numerical distance
p is
with the complex refractive index of the half-space
N being
The above solution is valid under the assumption that
For larger distances, the earth’s curvature is taken into account by employing the residue series solution of the problem, which converges poorly at shorter distances [
15].
Following the detailed derivation presented in [
16], the attenuation function of a vertically polarized ground wave at the great circle distance
d from a vertical electric dipole source of moment
propagating along a curved earth can be expressed through the following series:
where
and
with
being the complex surface impedance of the earth Z normalized by 120
,
the Height-Gain Function including refraction in a nonlinear atmosphere,
y the transmitter/receiver height (assumed to be 0),
x the numerical distance,
a the effective earth radius, and
k the wave number. A detailed description of the effective earth-radius concept as well as the nonlinear atmosphere representation in the Height-Gain functions can be found in [
16];
are the roots of the mode in Equation (
11) involving the Airy integral function
:
As a response to the poor convergence of the residue series at short distances and the inaccuracy of the flat-earth solution with respect to the effect of the earth’s curvature at low frequencies, a modified rapidly converging series solution proposed by [
19] can be used for short distance calculations.
A well-established approach to calculating the attenuation of a ground wave is to use a hybrid solution that employs the residue series for larger distances from the transmitter and the flat-earth solution with the power series expansion presented by [
20] for shorter distances, with the attenuation function
where
Finally, the R-Mode AGDF is based on the phase delay
of the ground wave over a homogeneous propagation path with respect to free space propagation in vacuum, and is given as
Several equivalent solutions can be found in the literature. The equations that are presented in [
21] can be implemented quickly and used for comparison, showing that the different approaches are in good agreement. The LFMF software package recommended by ITU-R P.368-10 [
22] considers an atmospheric refraction index with exponential decay, implements the aforementioned equations, and is written in C++, available under a permissive license. The results computed using LFMF account for the effect of finite ground conductivity and atmospheric propagation at an accuracy beyond linear or polynomial approximations. For computation of the AGDF, we modified LFMF to calculate the complex attenuation, i.e., the amplitude and phase delay, and wrapped it in the Python programming language.
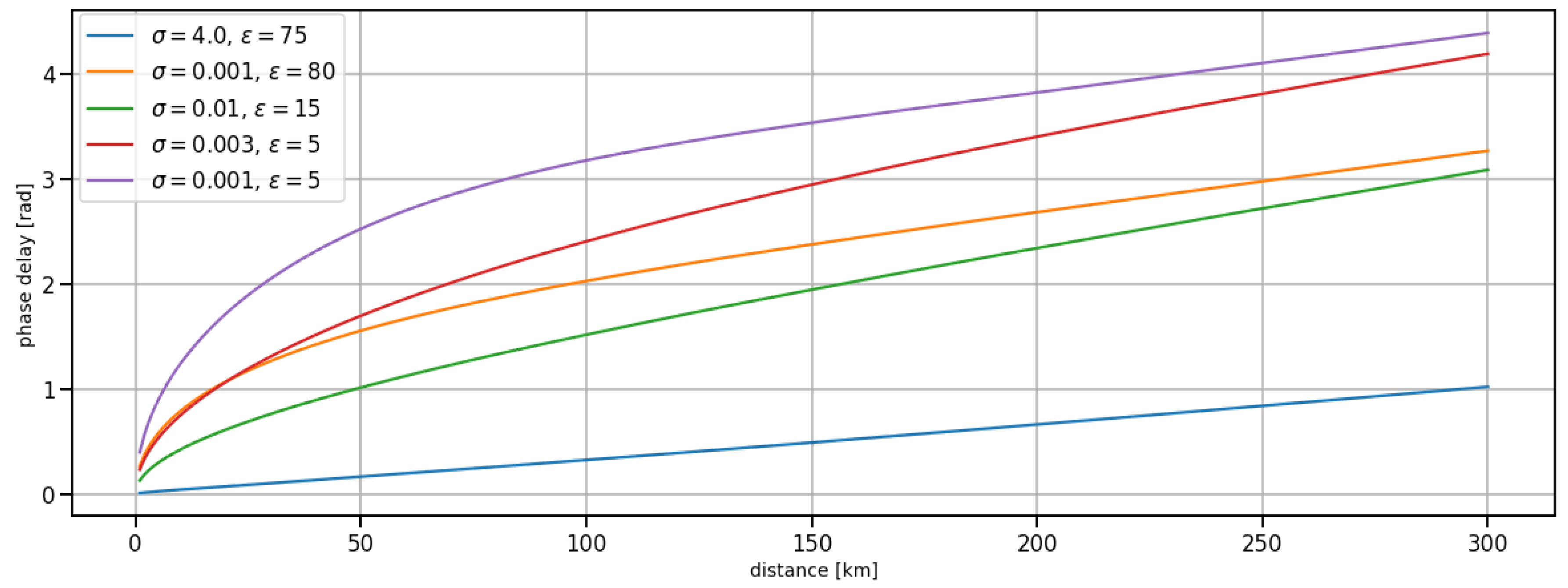
Figure 1 depicts the ground wave phase delay over distance for selected ground types at a frequency of 300 kHz as calculated using the modified version of LFMF created within the scope of this work. The plot represents the ground conductivity and permittivity of different ground types for the typical range of an MF R-Mode transmitter. While the phase delay introduced by ground wave propagation across seawater increases almost linearly over distance with a comparably small slope, propagation across land introduces large phase delays that vary significantly depending on the ground conductivity of the surface. Over the nominal range of an MF R-Mode signal, the phase delay caused by ground wave propagation is on the order of up to half a wavelength.
For a non-homogeneous path comprising multiple sections with different surface impedance, the attenuation function has to account for the discontinuity of electrical properties. Thus, the strong change of the wave tilt causes changes in amplitude and phase along the propagation path.
The attenuation function
of a wave travelling along a perturbed path of variable surface impedance can be calculated with the integral equation method [
23,
24] based on the Volterra-type integral equation of the second kind:
where
d is the distance from the transmitter,
is the slope angle of the terrain at a given point,
is the attenuation function for a homogeneous path with the reference normalized surface impedance
, and
is the varying normalized surface impedance of the perturbed propagation path as a function of distance and the equivalent normalized surface impedance
The numerical solution of the integral equation proposed by Monteath [
25] is implemented in the Python programming language within the scope of this work. The attenuation function
for a homogeneous path with the reference normalized surface impedance
is computed using the modified version of the LFMF software, using a value for
that represents propagation across an all-seawater path with a ground conductivity
= 4 mS/m and a relative dielectric permittivity
= 80.
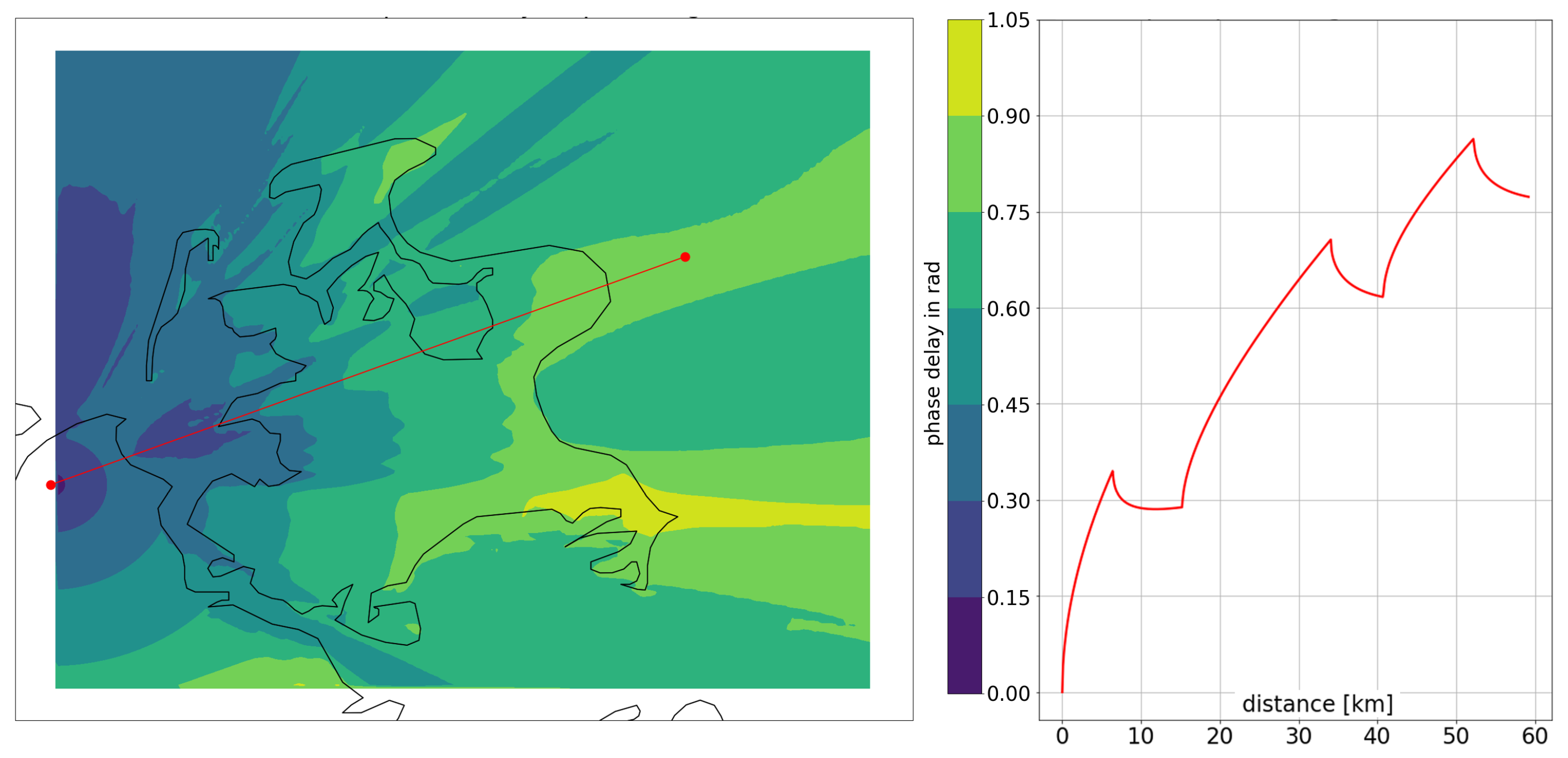
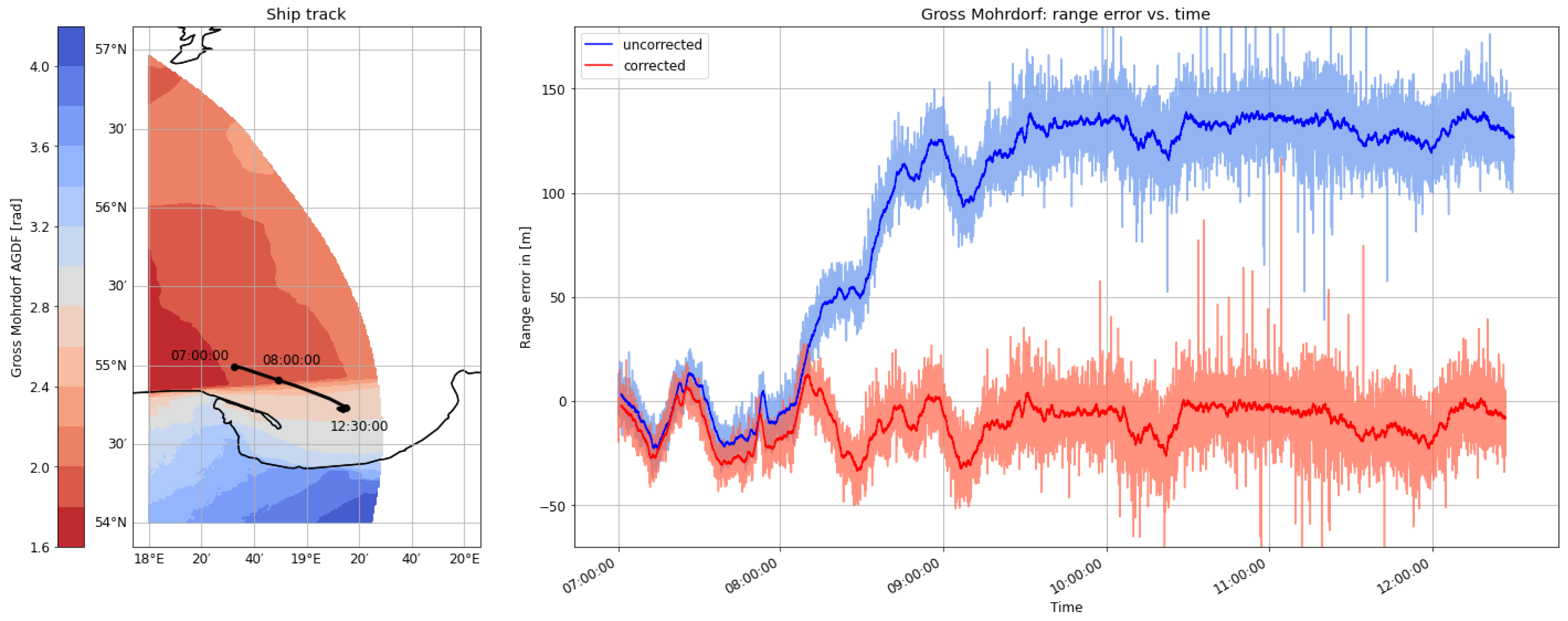
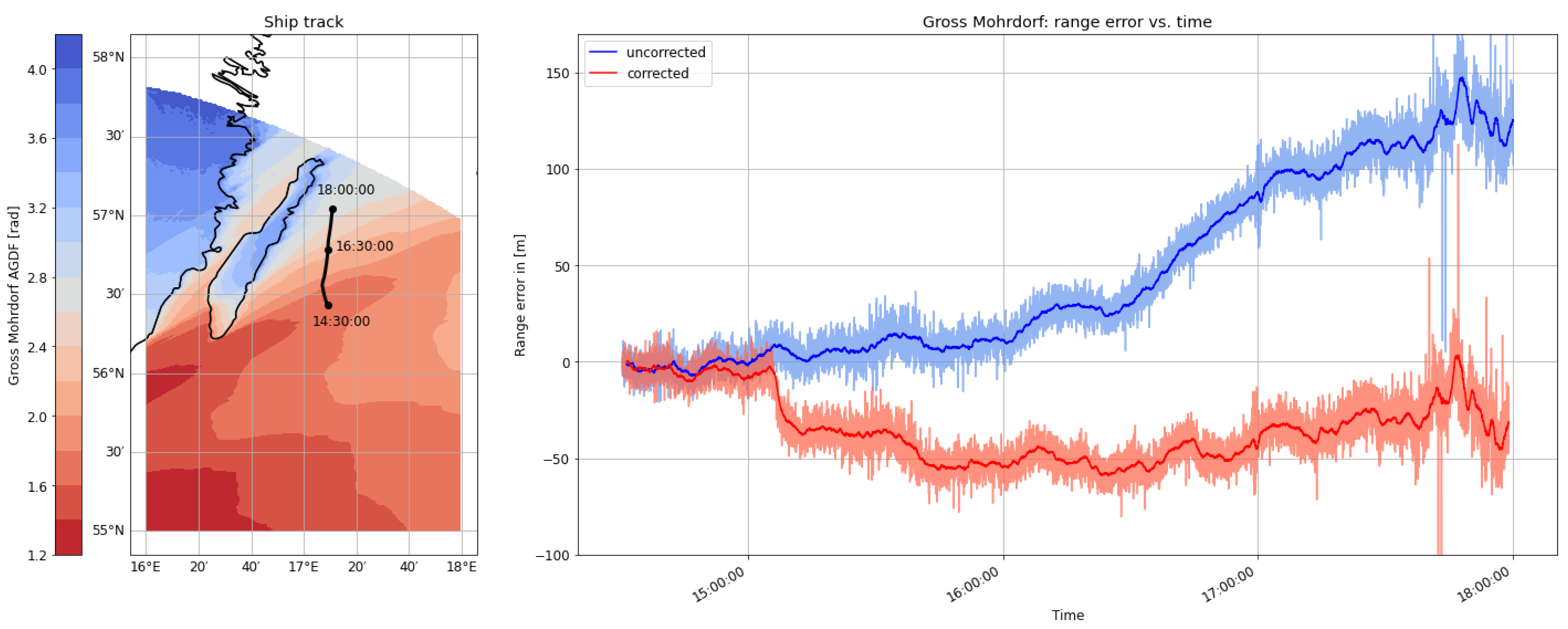
Figure 2 depicts the mixed-path ground wave phase delay of the MF R-Mode transmitter Groß Mohrdorf for a typical propagation path across the island of Rügen and the Baltic Sea. The effect of phase recovery at the boundary between land and sea is visible in the right half of the picture. The varying proportion of land along the overall composition of the propagation path results in variant shading of the ground wave propagation delay along the coastline. The phase of the signal varies on the order of up to an eighth of a wavelength around the island along an arc at a constant distance to the transmitter.
The largest source of error in the prediction of ground wave propagation delays is the inaccuracy of the underlying ITU-R P.832-3 World Atlas of Ground Conductivities [
26]. There are simply no data available for many regions, and where data exist they are often based on sparse measurements, which in the case of Germany were obtained decades ago.
3. MF R-Mode Atmospheric and Ground Wave Delay Factor (AGDF)
To compensate for the effect of ground wave propagation delays, a correction scheme that involves the calculation and 2D prediction of the ground wave attenuation function has been conceived. Based on Equation (
2), the measured electric field of the R-Mode signal can be expressed as the product of the vertical electric field in free space
(defined in (
1)) and the ground wave attenuation function
W for the propagation path. To obtain ranges from phase estimates with respect to the speed of light in a vacuum
, the argument of the attenuation function has to be subtracted from the measured field. The Atmospheric and Ground Wave Delay Factor (AGDF) is defined as the ground wave phase delay
or the negative argument of
W (see Equation (
16)), and has to be added to the estimated phase of the measured signal, as in
to obtain the propagation delay of the free space wave.
The AGDF accounts for the effect of finite ground conductivity and the atmospheric delay between transmitter and receiver. In practice, the aforementioned effects can neither be modelled nor predicted completely. The temporal variation of the AGDF caused by changes in temperature, soil moisture, ice coverage, and other factors is not predictable on the basis of static ground conductivity maps. The deviation of the true ground electrical characteristics and the static map leads to an additional error. Additionally, there is an unknown delay that occurs in the transmitter and the receiver. Equation (
18) displays the problem by separating the AGDF into a predicted part
, a temporal part
, and an error caused by map inaccuracies
, then adding the transmitter
and receiver delay
as well as a residual phase error
that accounts for noise and higher-order effects we cannot describe with the approach [
27]:
In summary, adding the predicted
to the estimated phase of the received signal yields the free space propagation delay plus the transmitter delay, receiver delay, temporal AGDF variation, map inaccuracy, and a residual error. The
is predicted based on the equations presented in
Section 2 and a static database of ground conductivities. This accounts for ground wave phase delay and atmospheric delay. The ratio of the predictable part
and unpredictable part of the AGDF, which contains
,
, and
, cannot be quantified easily. In general, the quality of the prediction, and as such the fraction of the AGDF that is predictable, depends on the quality of knowledge about the earth‘s surface. If the ground conductivity, ground electrical permittivity, and terrain features are well known in the sense of high geometric resolution and a full description of the spatial and temporal dynamics, the prediction is theoretically bound by the uncertainty of the integral equation approach, which is based on the assumption that ground topography is slowly varying [
27].
3.1. Calculation of the
For the determination of the for MF R-Mode, LFMF software was modified to compute the phase and amplitude of the complex attenuation function with a reference normalized surface impedance representing seawater. For a non-homogeneous mixed path, the normalized surface impedance of the path is calculated using the ground conductivity obtained from ITU-R P.832-3 in conjunction with reasonable values of the relative permittivity .
Because the data in ITU-R P.832-3 is not provided in a machine-readable format, it was converted into a shapefile that contains polygons of equal conductivity and a high-resolution map of coastlines. For the calculation of
, the propagation path segments were determined by an intersecting propagation path with the polygons and calculating the intersection point with each polygon using the Python packages Geopandas and Shapely. The slope of the terrain was determined by extracting elevation values from the EUDEM digital elevation model of Europe [
28].
Using the Monteath method with an integration interval of 50 m, the
was calculated for the segmented path. The process of determining the intersection points of the polygons and the propagation path is both computationally demanding and time consuming. Therefore, the selected area of interest on the ground conductivity map was divided into a grid of evenly spaced points, for which the
computation was carried out once. The grid spacing may be larger in open sea areas with smaller
gradients, while the accuracy requirements for R-Mode in coastal areas and the strong influence of the land–sea boundary on the ground wave phase delay demands a smaller grid spacing near the coastline. The
for an arbitrary point within the area was then obtained by performing grid interpolation on a subset of points using Python Scipy (based on a Clough–Tocher scheme [
29]).
3.2. Application of the
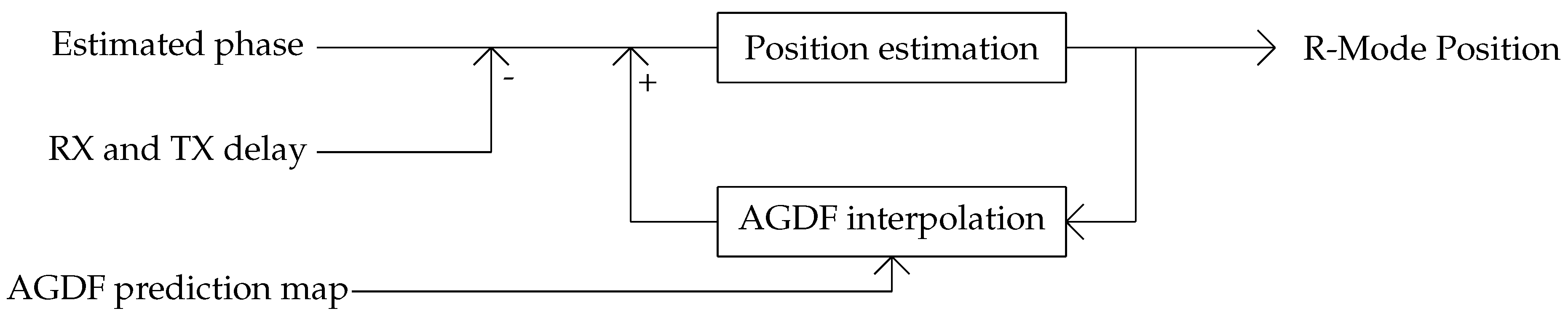
The
is embedded into the receiver through the simple correction scheme shown in
Figure 3, which is is added to the raw phase estimate after the transmitter delay is removed. A feedback loop is used to approximate the position, converging to a more accurate AGDF in each iteration.
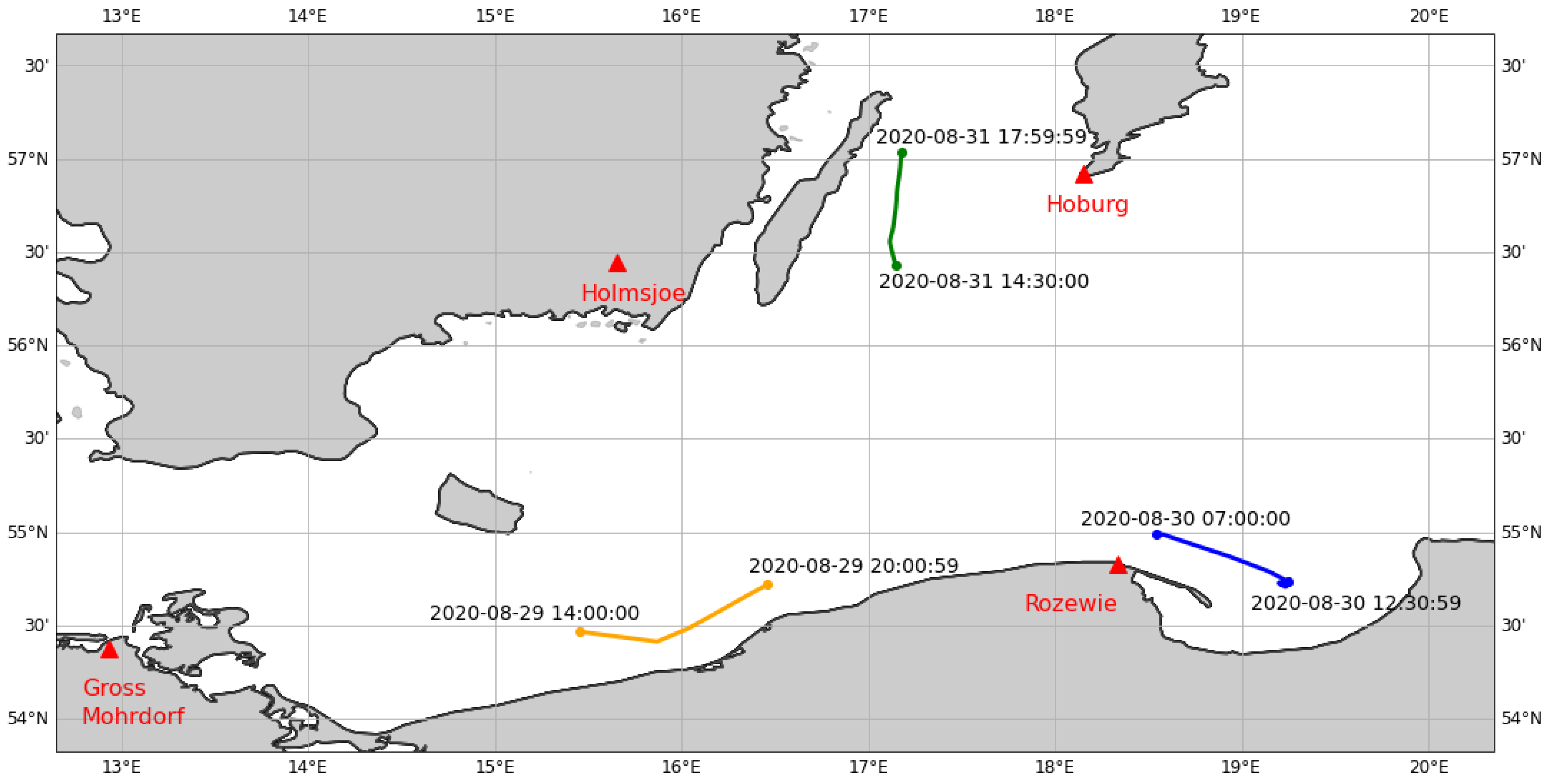
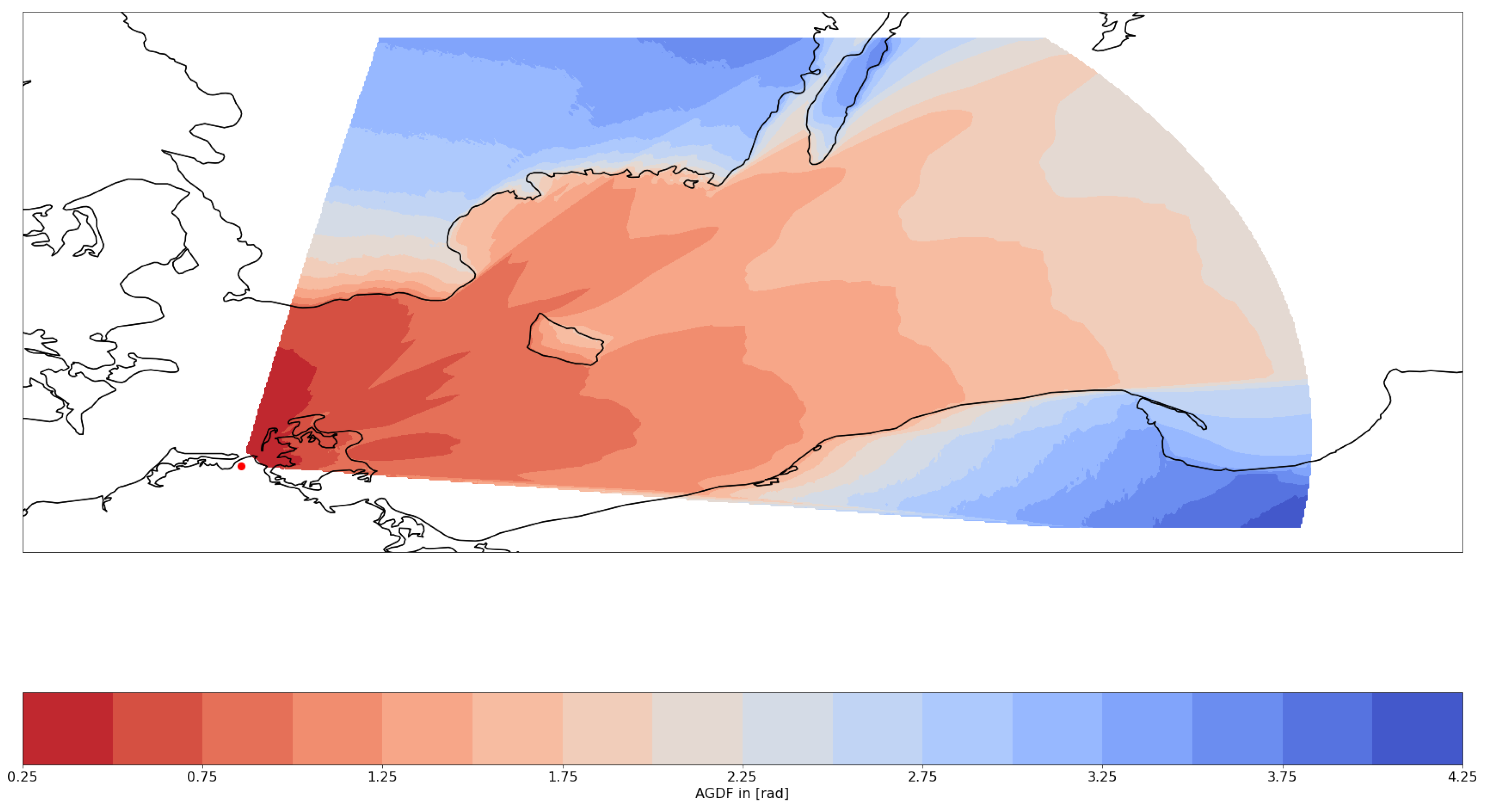
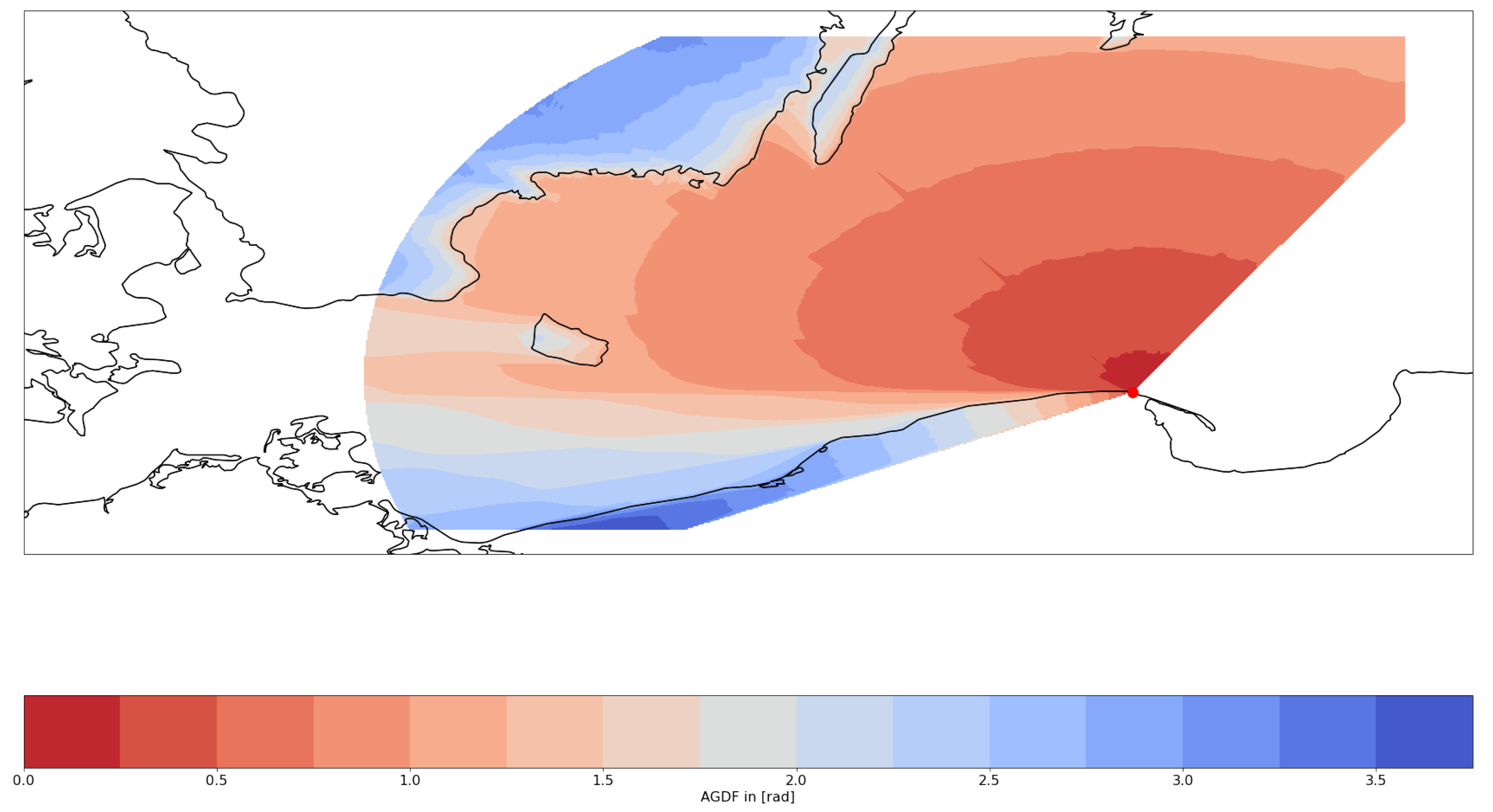
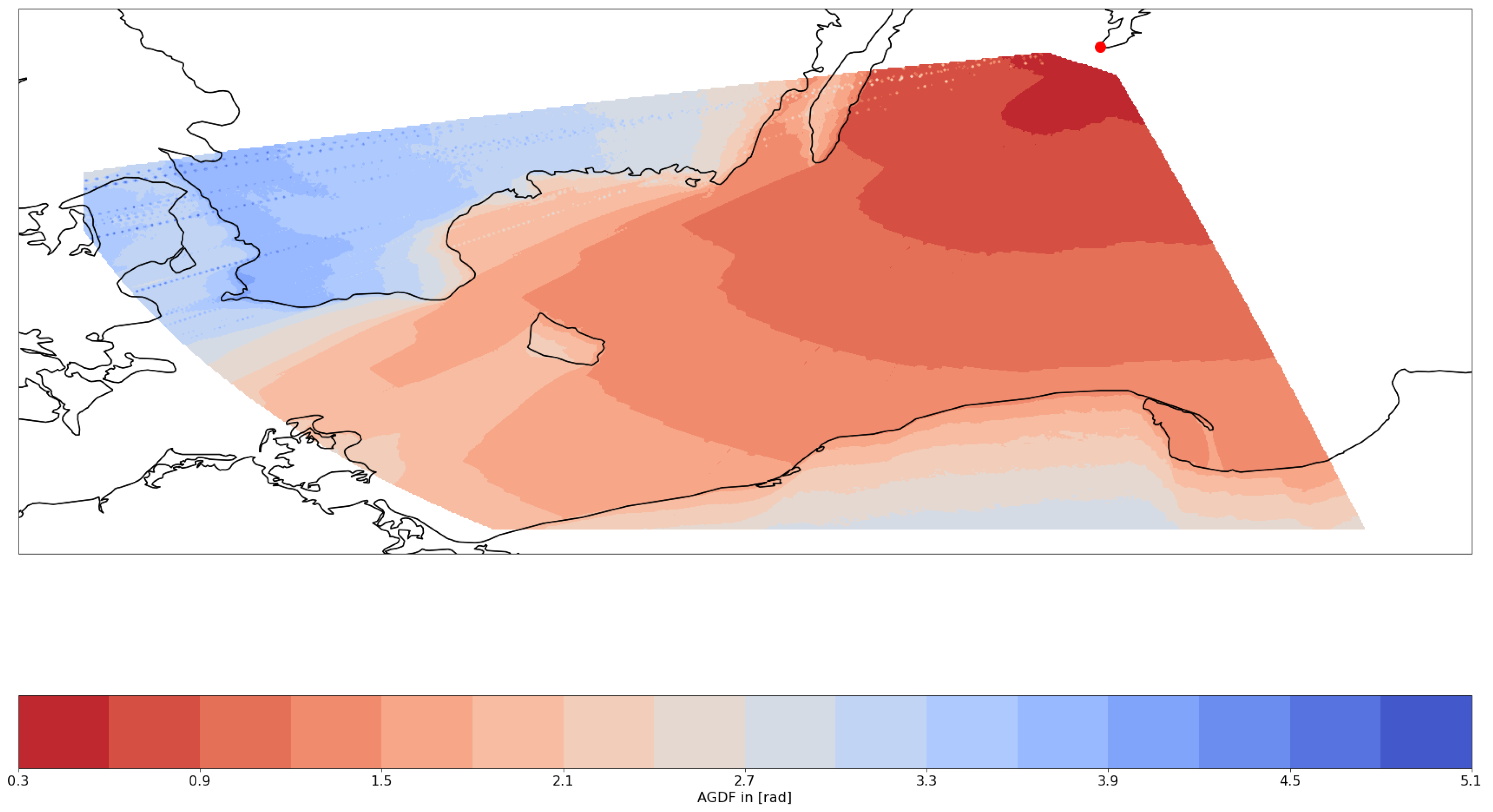
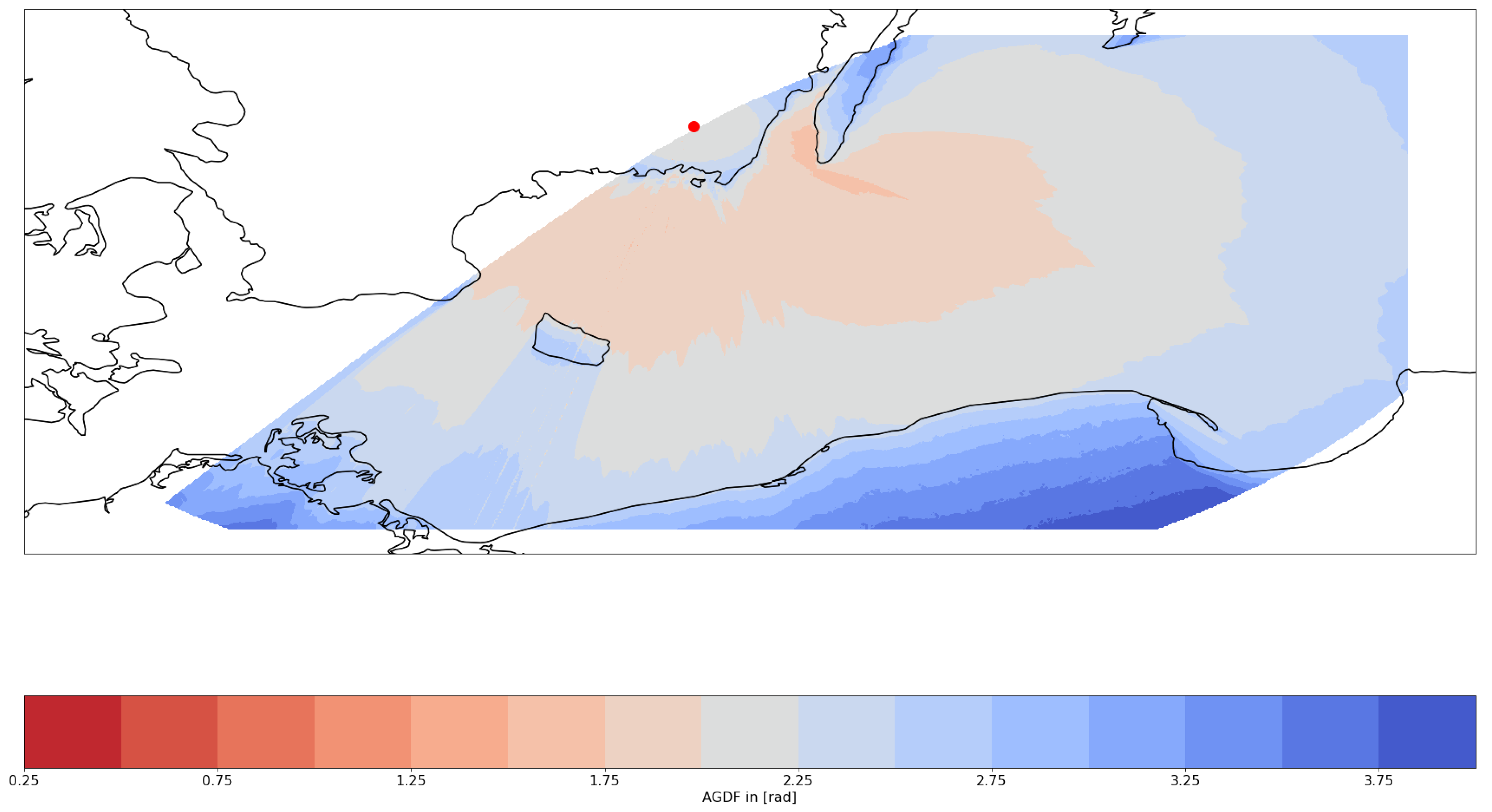
AGDF maps of several transmitters were computed for the MF R-Mode testbed in the southern Baltic Sea. The figures in
Appendix A depict the AGDF in radians for each of these transmitters.
Table 1 contains the transmitter name, frequency, and location.
3.3. Comparison to LORAN ASF
In the LORAN-C and eLoran systems, the effects of ground wave propagation and atmospheric delay are compensated using a correction term, the propagation delay
, where PF is the primary phase factor, SF is the secondary phase factor, and ASF is the additional secondary phase factor. A detailed description of the propagation delay prediction and compensation techniques for Loran can be found in [
30,
31,
32,
33].
The PF accounts for atmospheric delay [
34], while SF accounts for the propagation delay of the signal occurring over a homogeneous seawater path (
= 70,
= 5 mS/m). In general, the SF can be calculated with the methods described in
Section 2, while for LORAN-C it is approximated with a polynomial. In practice, the effects of pure seawater propagation and mixed land–sea path propagation are hard to distinguish. The SF and ASF can be predicted or measured together and separated by subtracting the ground wave phase delay for seawater parameters [
33]. The ASF accounts for all additional delays related to mixed-path ground wave propagation with respect to propagation across seawater. It can either be predicted with a certain accuracy, or measured systematically in survey campaigns. BALOR ASF prediction software can be used to predict the PF, SF, and ASF for an area based on a database of ground conductivity [
31]. If an ASF is not available for a certain area, the correction of PF and SF still yields more accurate results than an uncorrected range estimate based on the free space propagation assumption.
Because the electrical parameters of the ground depend on moisture and temperature, there is a temporal variation of the ASF, as its magnitude depends on the specific area of interest [
33]. The quality of ASF predictions always depends on the accuracy of the underlying ground conductivity and permittivity database. Therefore, the ASF can be expressed as a sum of the components
where
is the predicted ASF,
is the error of the prediction introduced by database inaccuracies, and
is the temporal variation. In eLoran,
is measured and computed at reference sites. The obtained value is distributed through a differential eLoran service.
The AGDF of MF R-Mode signals is computed with a similar methodology to that of the ground wave propagation delay for Loran signals. Due to the differences in system design, MF R-Mode uses a correction scheme that is intended to compensate the delays for each CW tone of the signal on the phase level, rather than explicitly in the time domain.
Table 2 lists the major differences between R-Mode and Loran.
The exact prediction and compensation technique used in Loran is not directly applicable to MF R-Mode. The AGDF is frequency-dependent and has to be determined for each transmitter individually, which would require a different polynomial to express the SF for each CW tone, while the seawater reference of the Loran SF is not applicable to inland waterways or bodies of brackish water such as the Baltic Sea. Because the ground wave propagation delay and atmospheric delay can be calculated all at once, the separation of these factors is not considered useful at the moment.
5. Discussion and Future Work
Medium-frequency R-Mode is a promising technology that can enable resilient PNT. The required positional accuracy [
37] can be achieved if ground wave propagation delays are predicted and compensated.
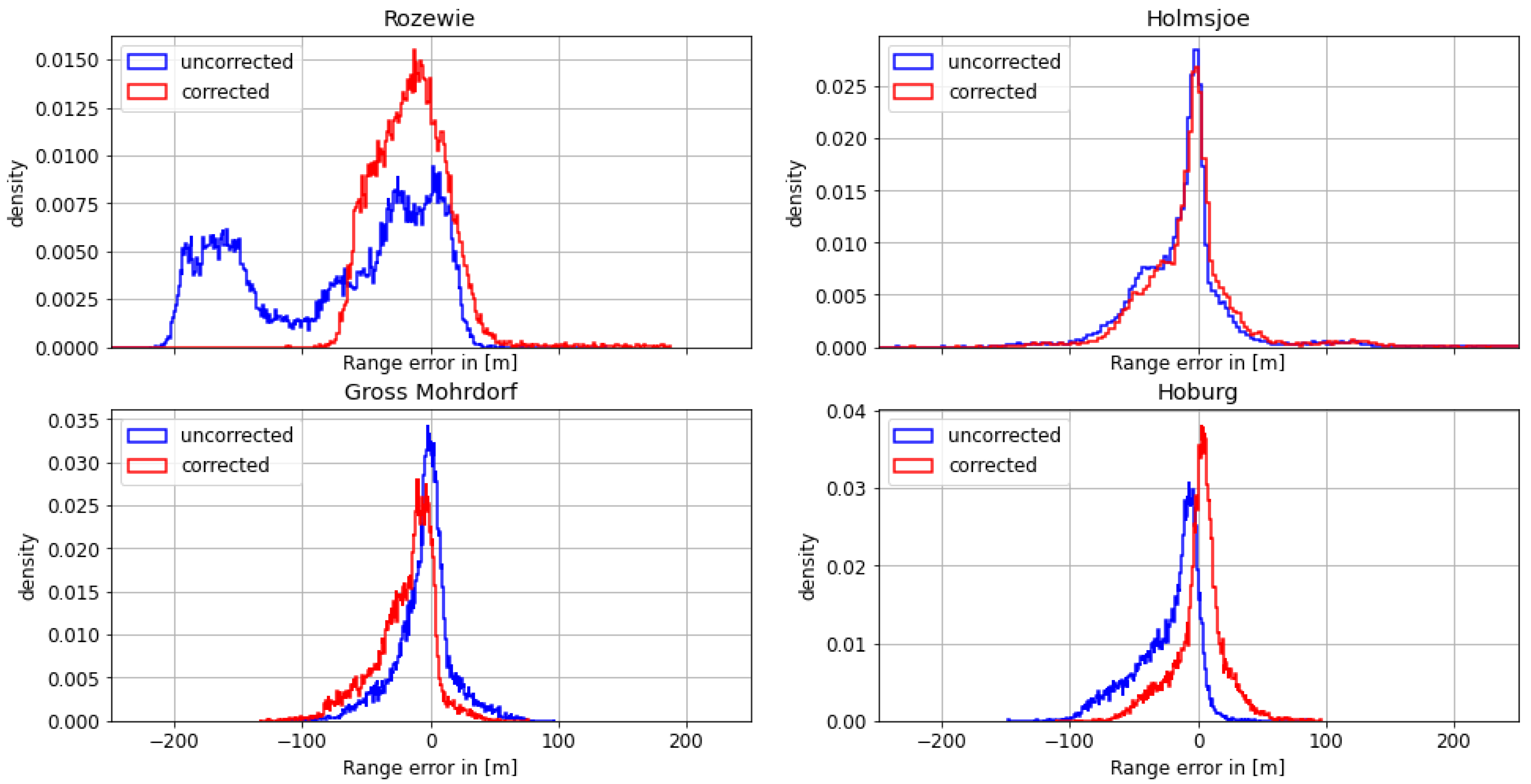
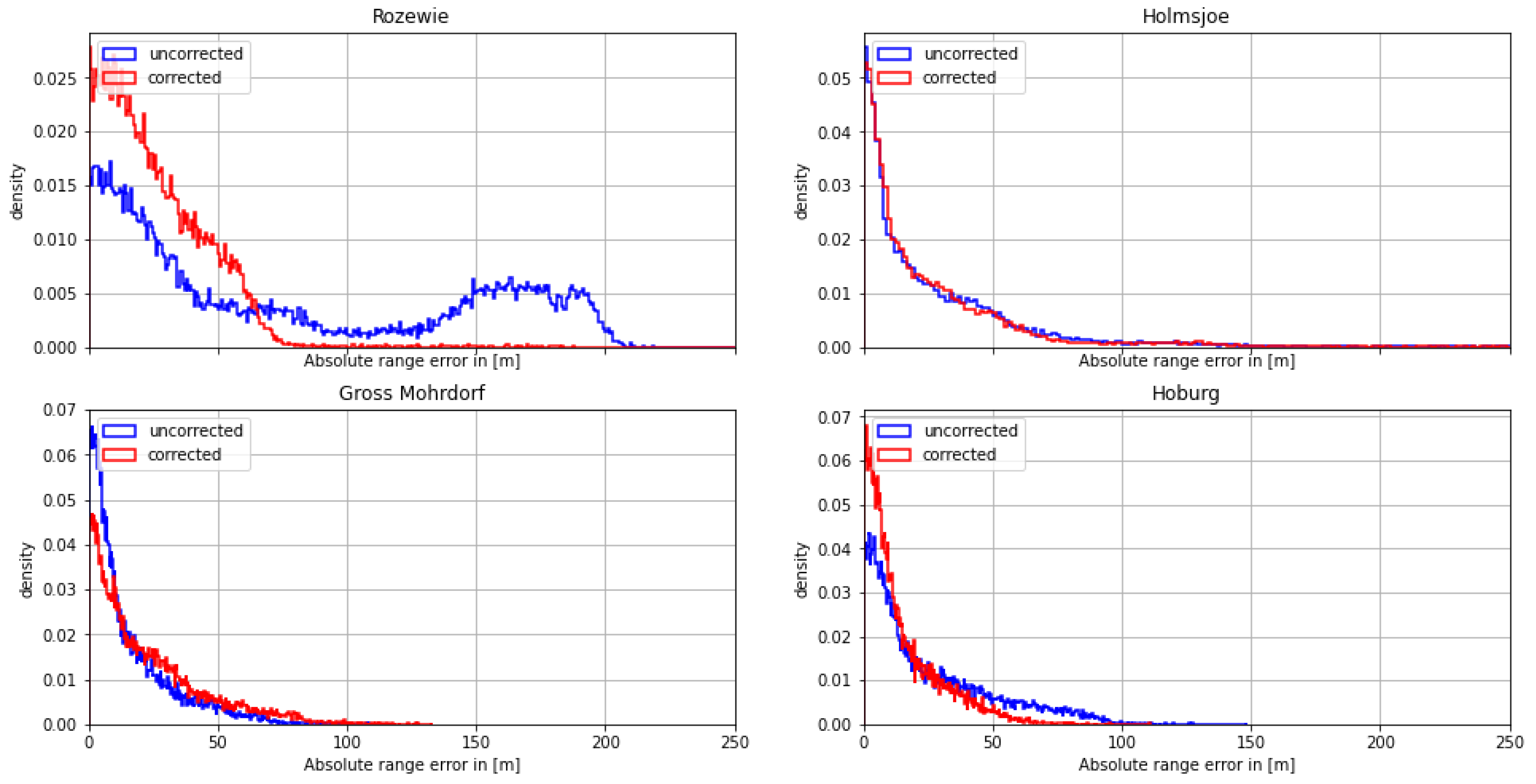
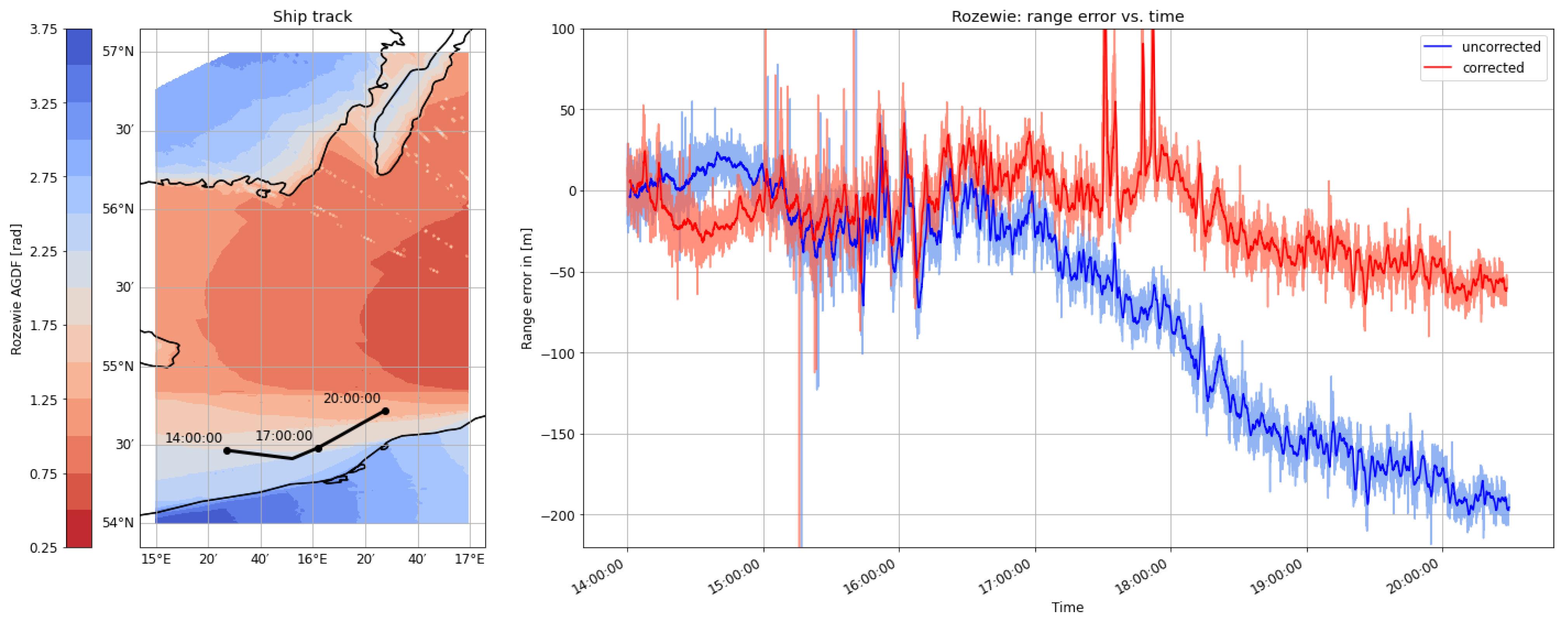
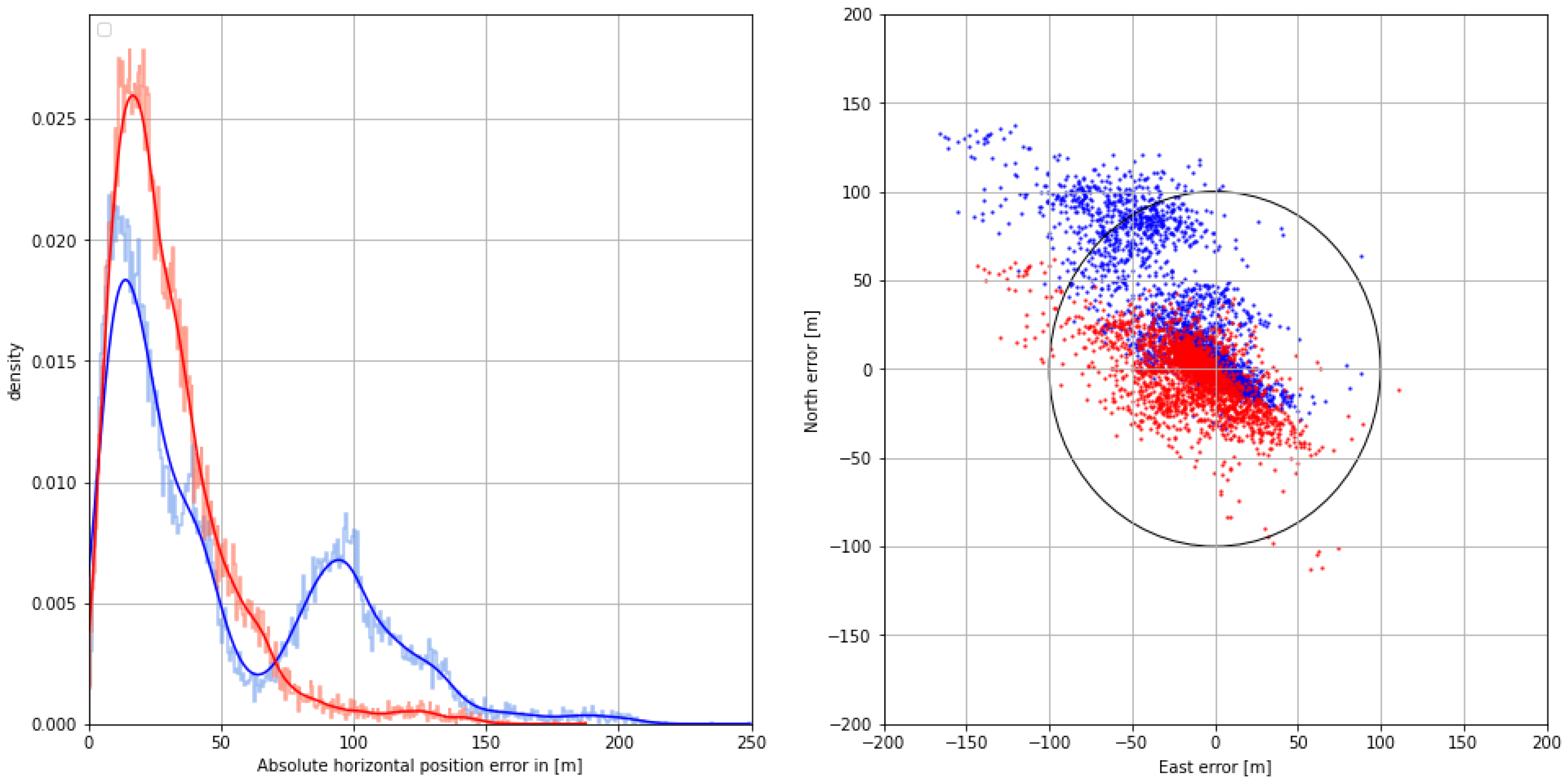
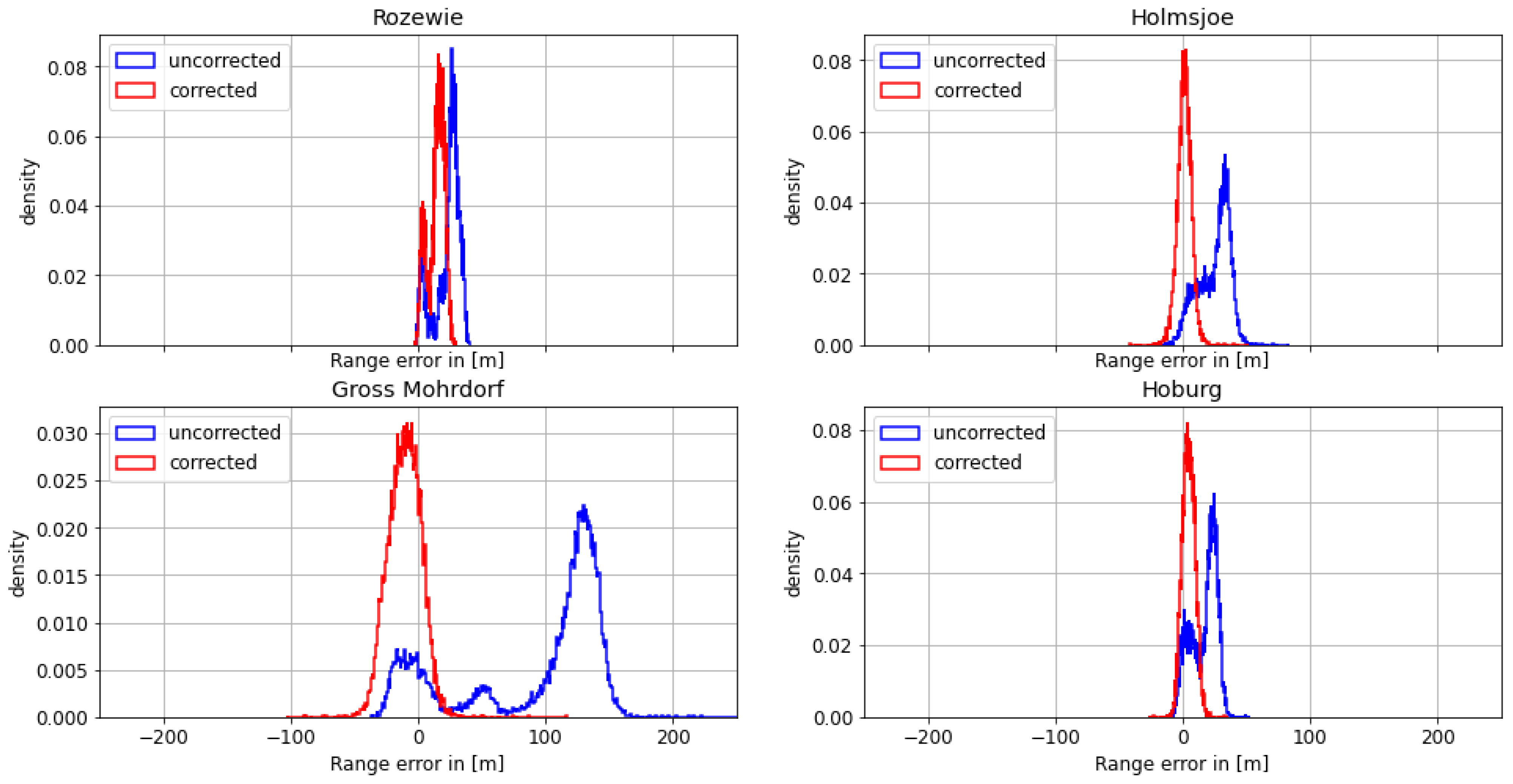
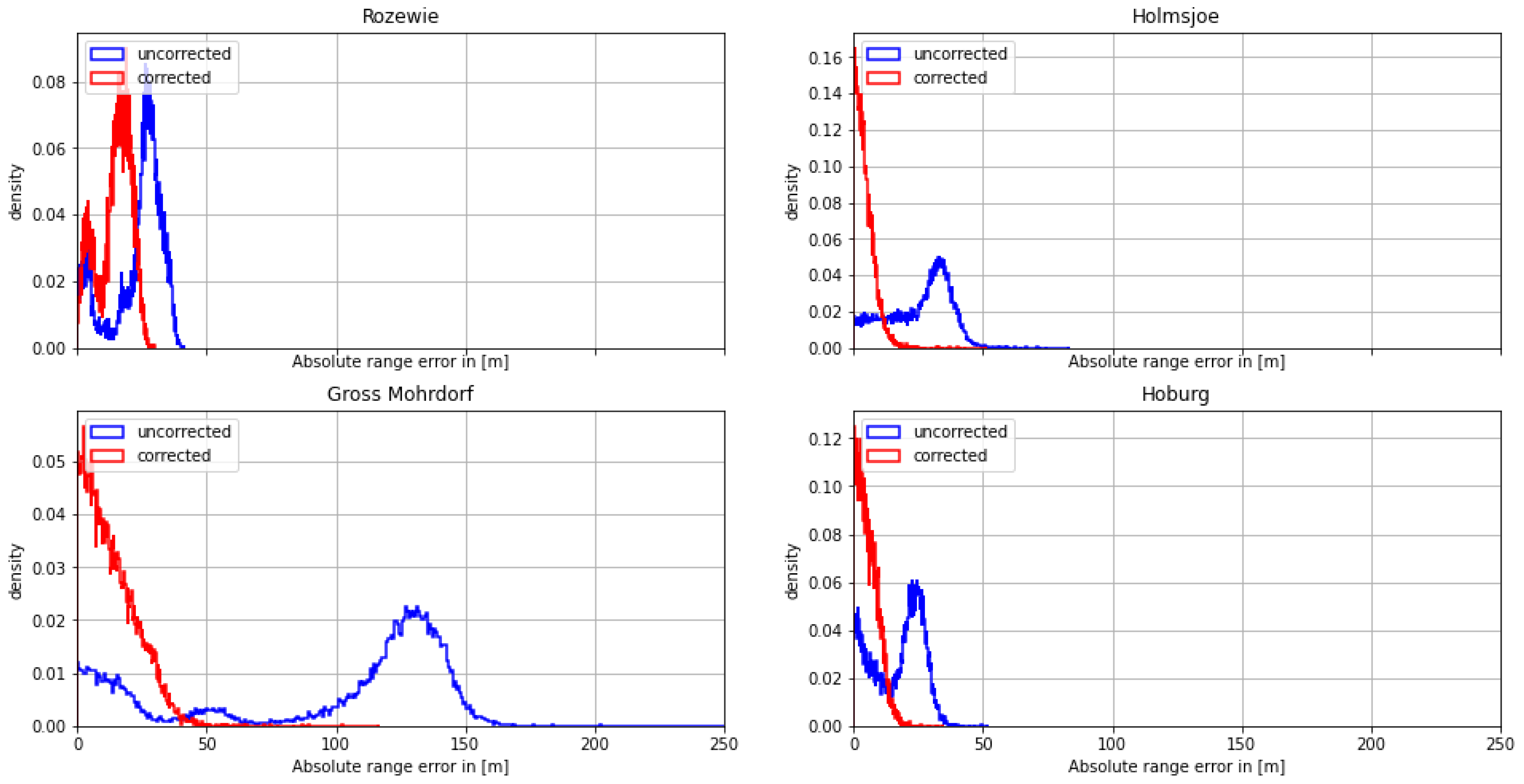
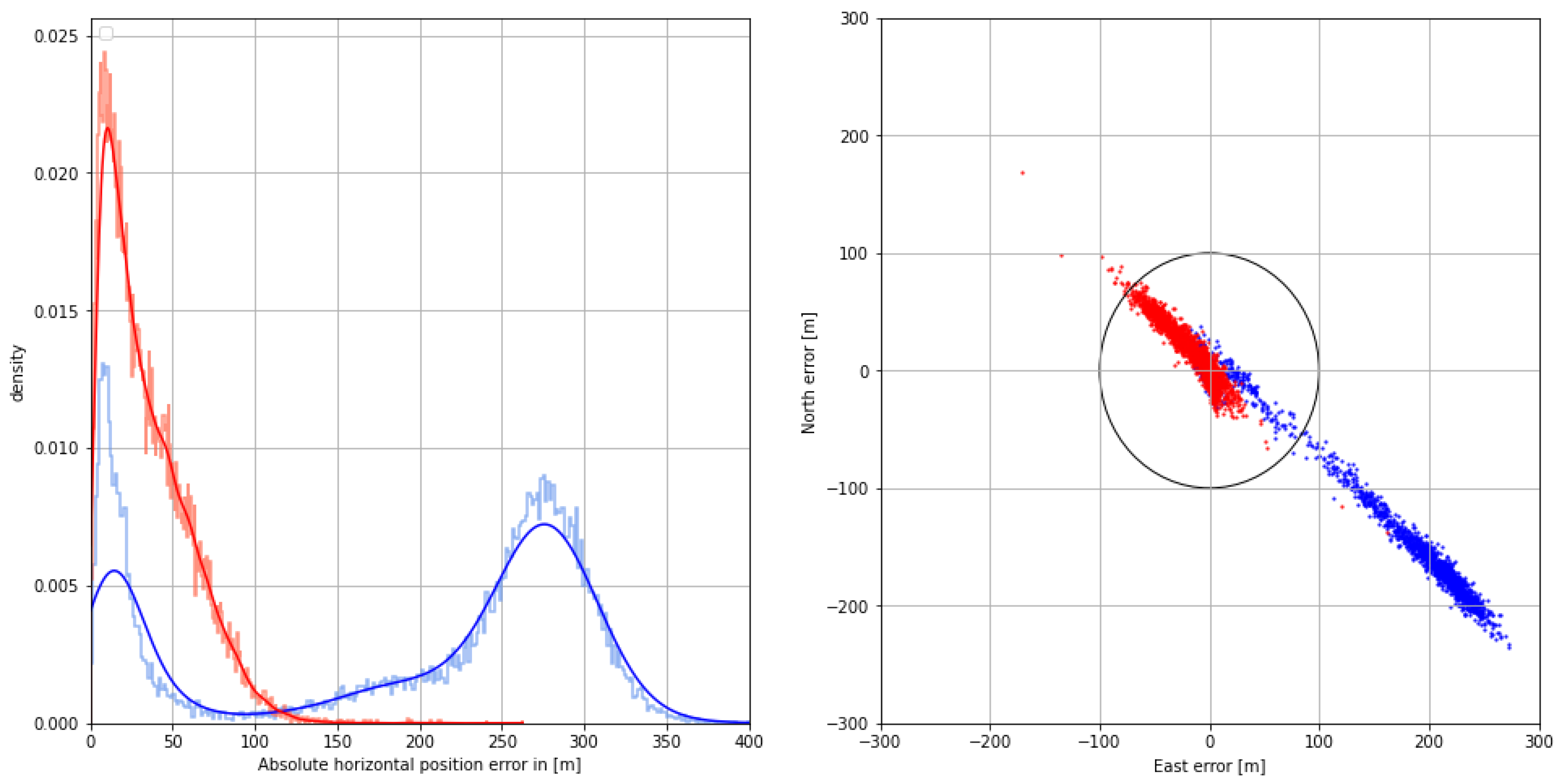
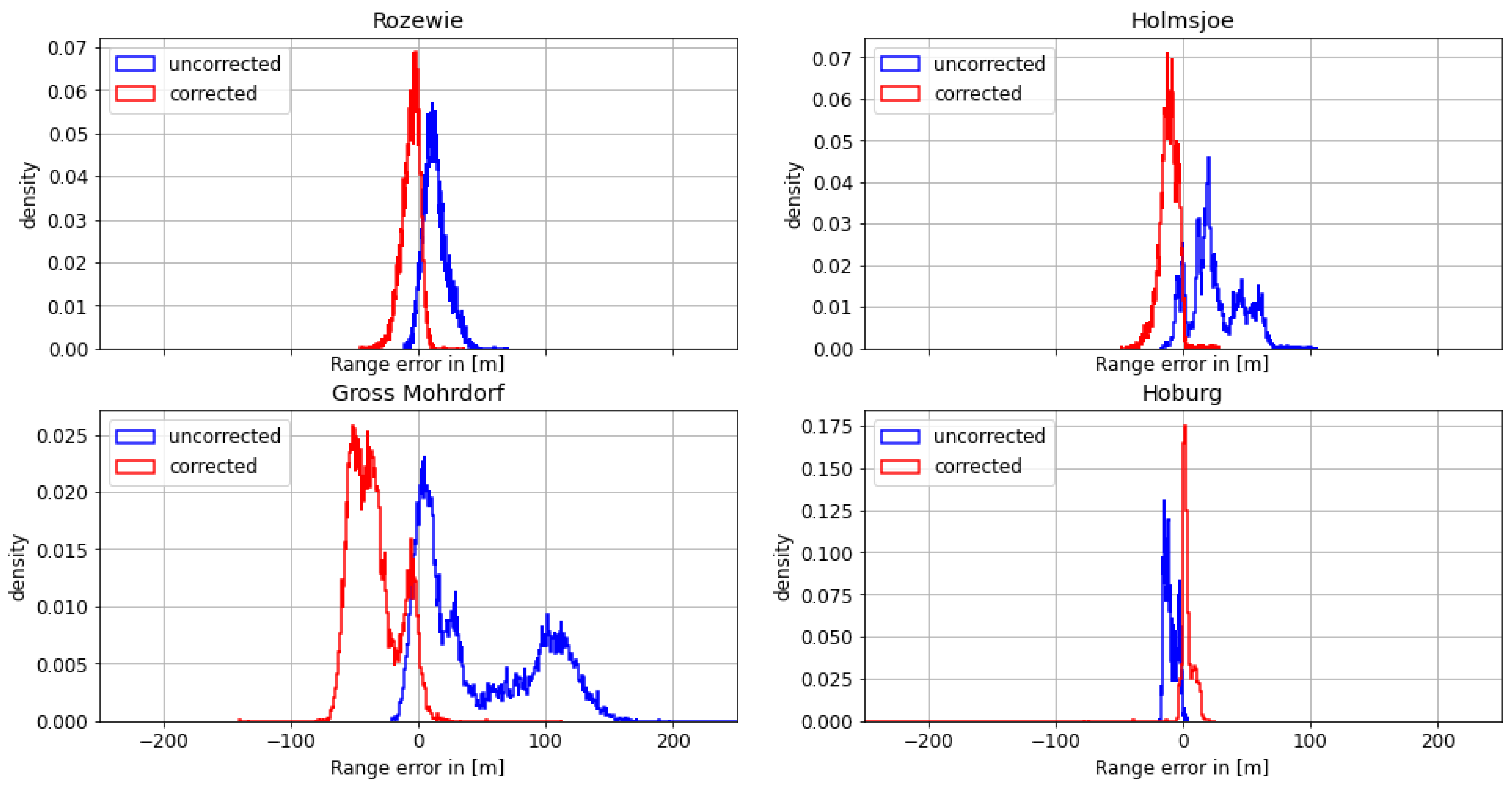
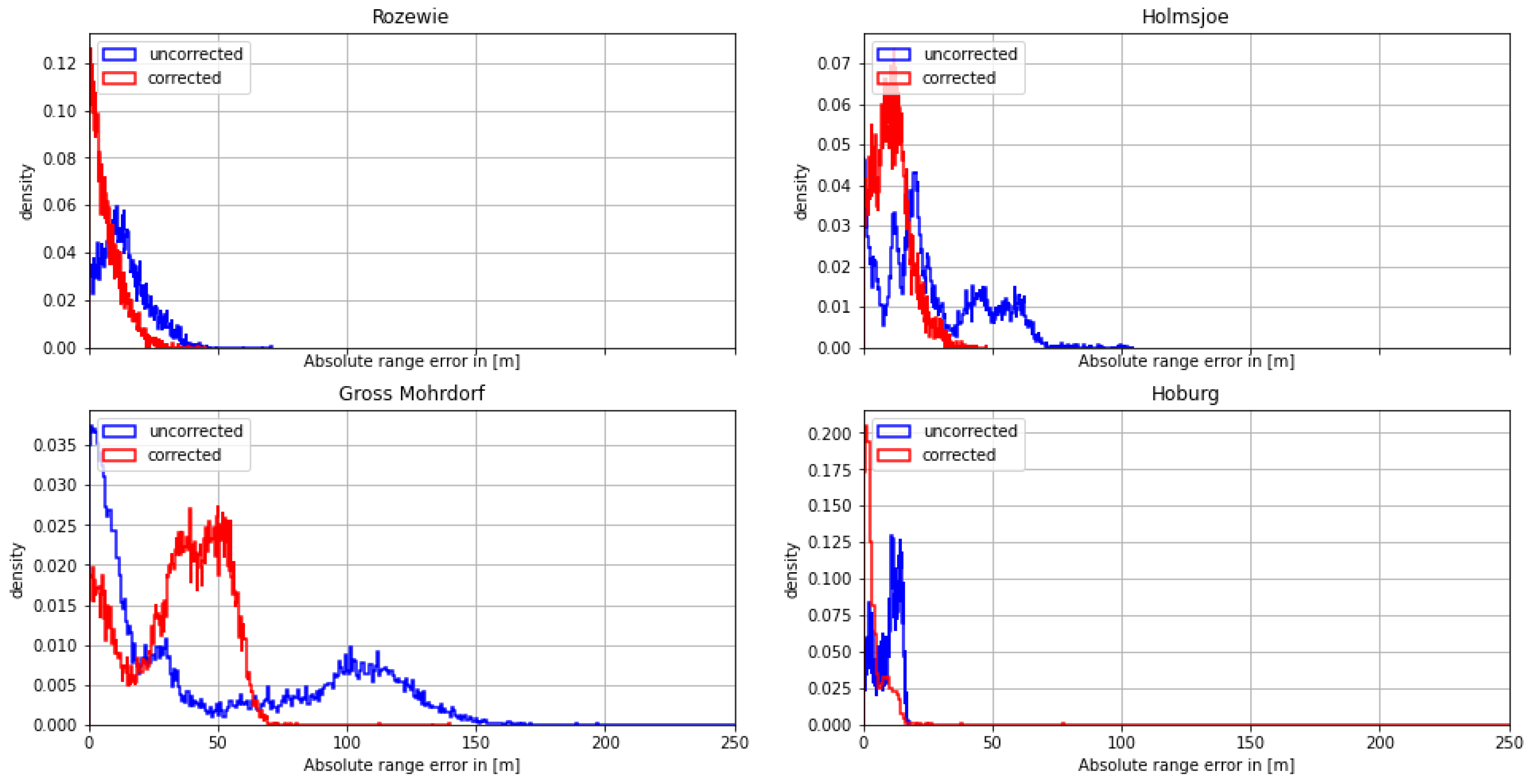
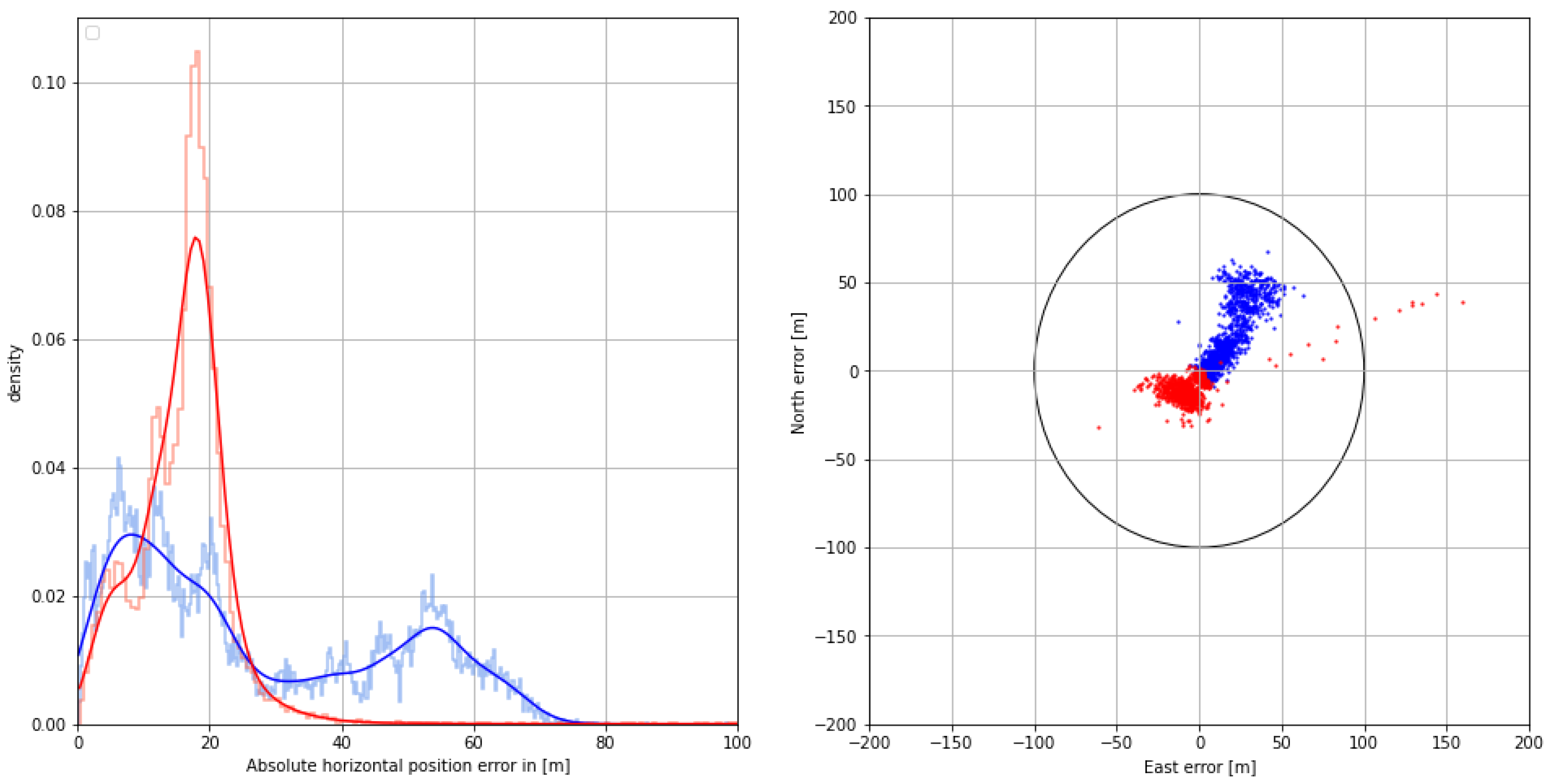
The approach of using the Atmospheric and Ground Wave Delay Factor (AGDF) to correct ground wave phase delays has been introduced in this paper. The results obtained during a shipborne measurement campaign in the Baltic Sea R-Mode test bed clearly show improvement of the positional accuracy when AGDF correction is applied to the data. The datasets were obtained during maneuvers with increased impact of ground wave propagation due to variable land–sea propagation paths. In all of these cases, the accuracy of the R-Mode position was poor, sometimes even below the requirement of an error under 100 m 95% of the time. The AGDF decreases the ranging error and increases the positional accuracy significantly, allowing the system requirements to be fulfilled.
The AGDF approach is a method for predicting the complex attenuation of a wave at low and medium frequencies on a two-dimensional grid based on a database of ground conductivities. The approach is not limited to use within the MF R-Mode system, and can be applied to similar problems in the navigation domain. Though the prediction of ground wave propagation delays is always limited due to the lack of accurate real-time information on the propagation path, it yields results that are sufficiently accurate for the intended purpose. Even without extensive AGDF measurement surveys, the static prediction performs well in the Baltic Sea.
However, the results indicate that there are shortcomings in the proposed method. The data presented in this paper suggest that AGDF correction may yield values that are smaller or larger than the actual ground wave propagation delay in the area. A plausible explanation for this is discrepancy between the ground conductivity value obtained from the ITU World Atlas of Ground Conductivities and the actual value at the time of signal reception. The ground conductivity of an area depends on various factors, for example, the soil texture, volumetric water content, and temperature. At present, these parameters are not all covered by the static database provided by the ITU, although the authors have conducted initial investigations on that matter [
38].
The AGDF prediction method employed in this paper lacks the ability to include the influence of higher-order propagation effects caused by terrain irregularities. Though this influence may be insignificant for certain smaller terrain features with respect to the wavelength of MF R-Mode signals, it has to be taken into account in the future.
The AGDF prediction method is not limited to the ground conductivity maps provided by the ITU. Future improvements will include the methods proposed in ITU-R P.527 and soil texture maps for selected areas. This will enable finer-grained prediction while taking moisture and temperature into account.
Another issue is the incorporation of the effect of sea ice into the prediction method. In combination with real-time sea ice coverage predictions, the AGDF could be refined for areas with significant ice coverage.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}