
Comparative Analysis of HRTFs Measurement Using In-Ear Microphones



Abstract
:1. Introduction
2. Measurement Techniques
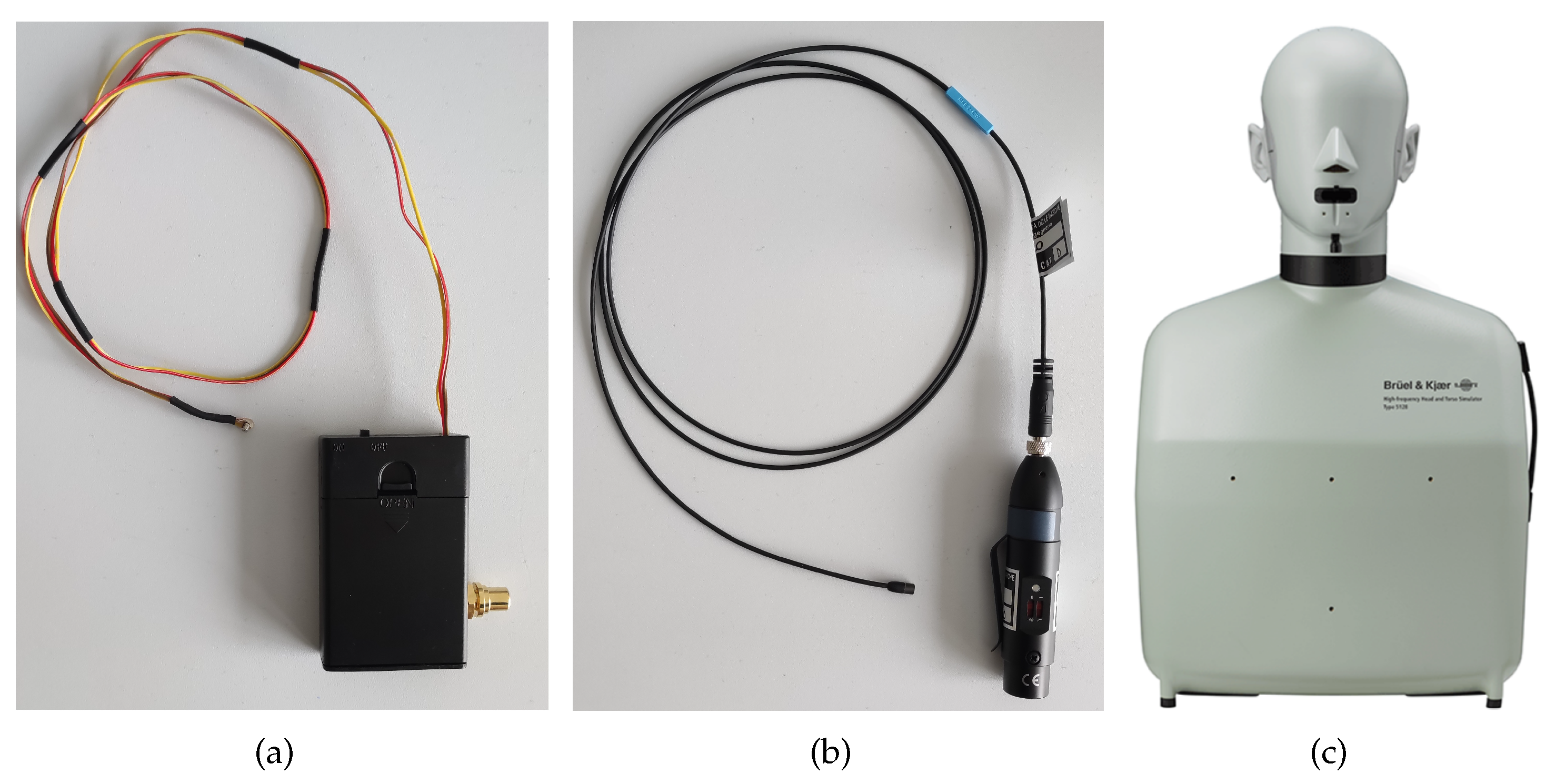
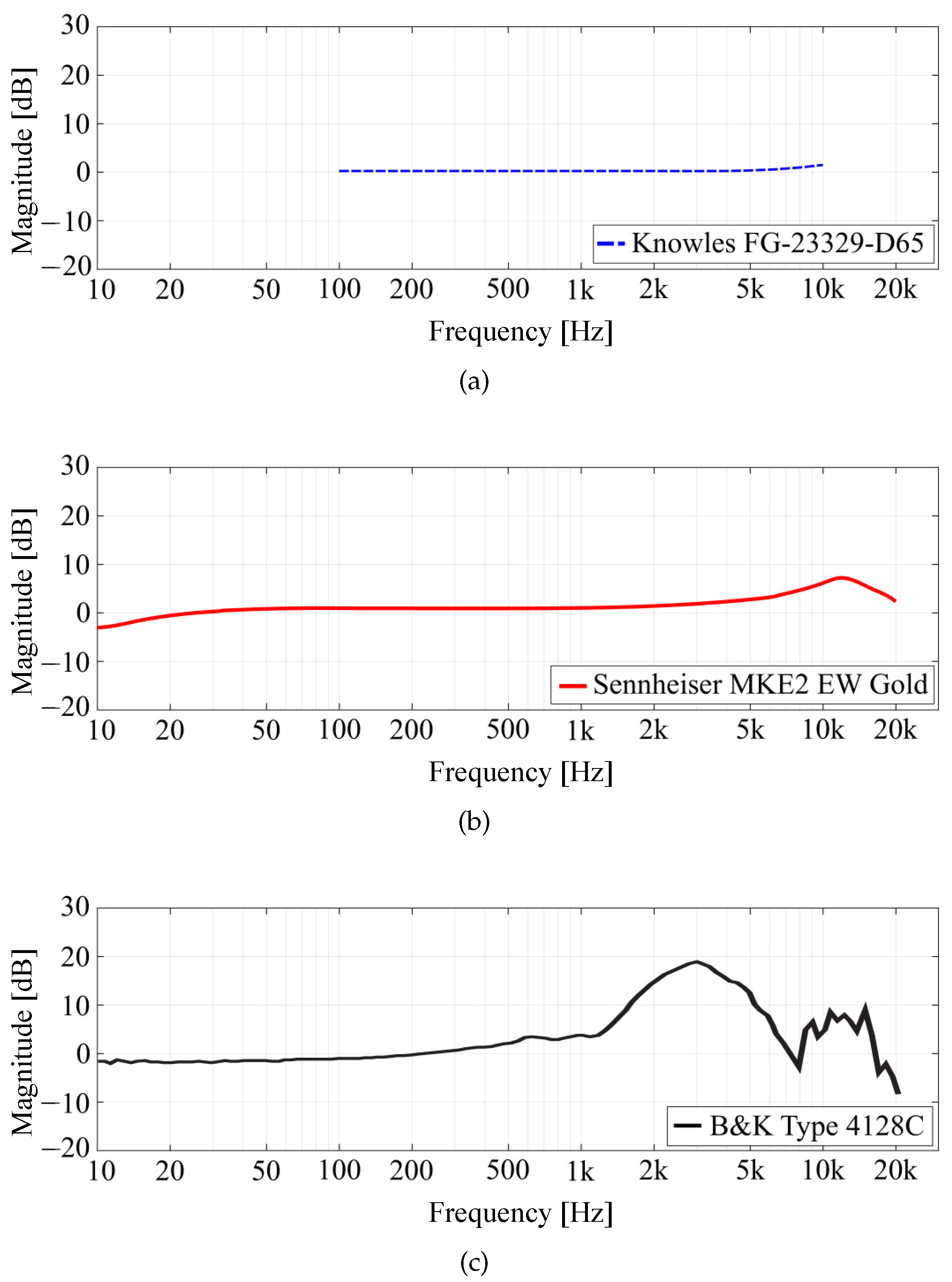
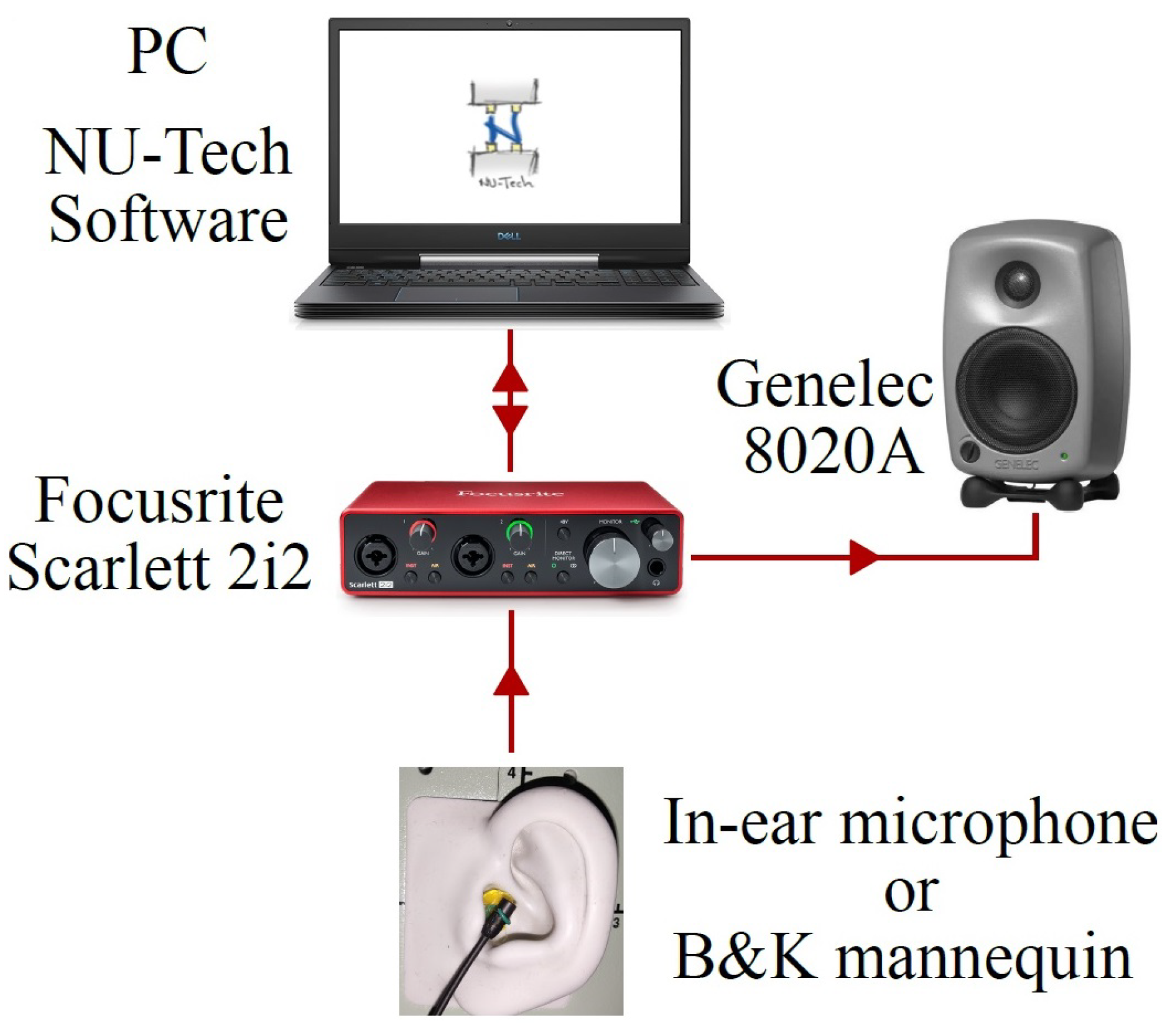
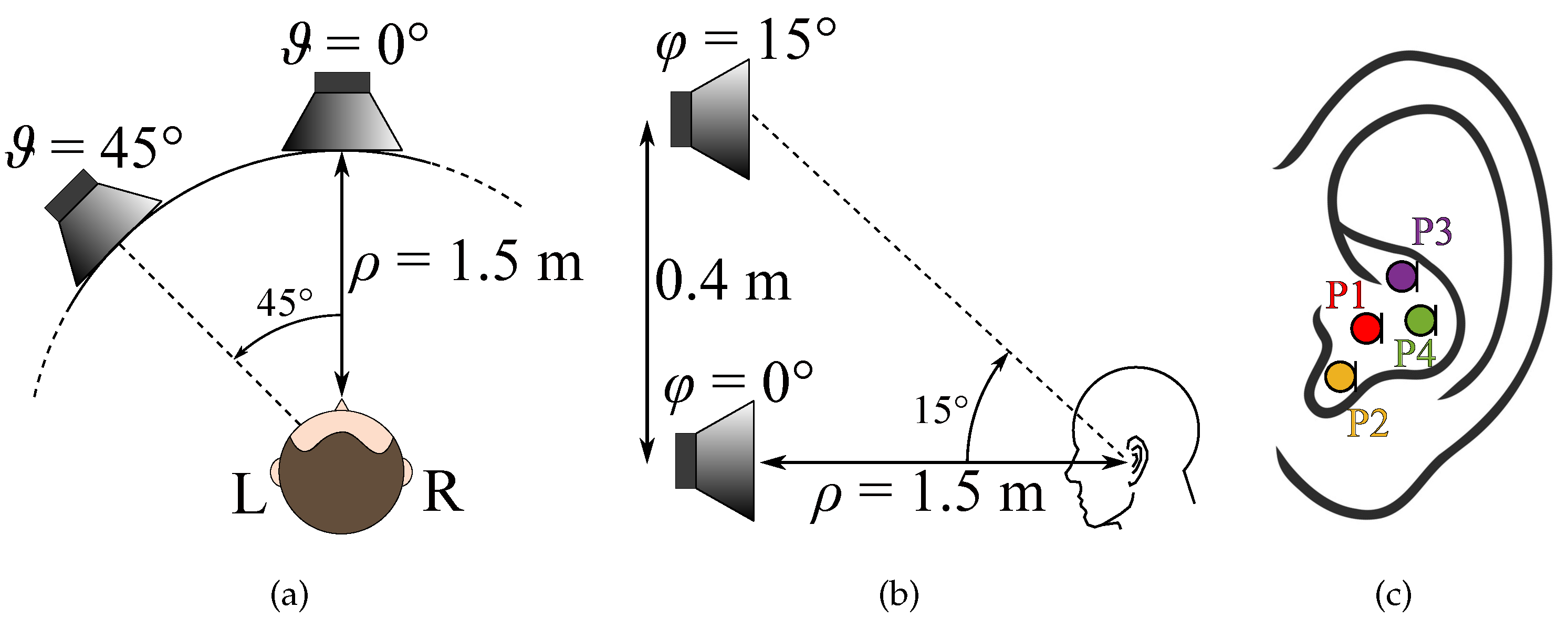
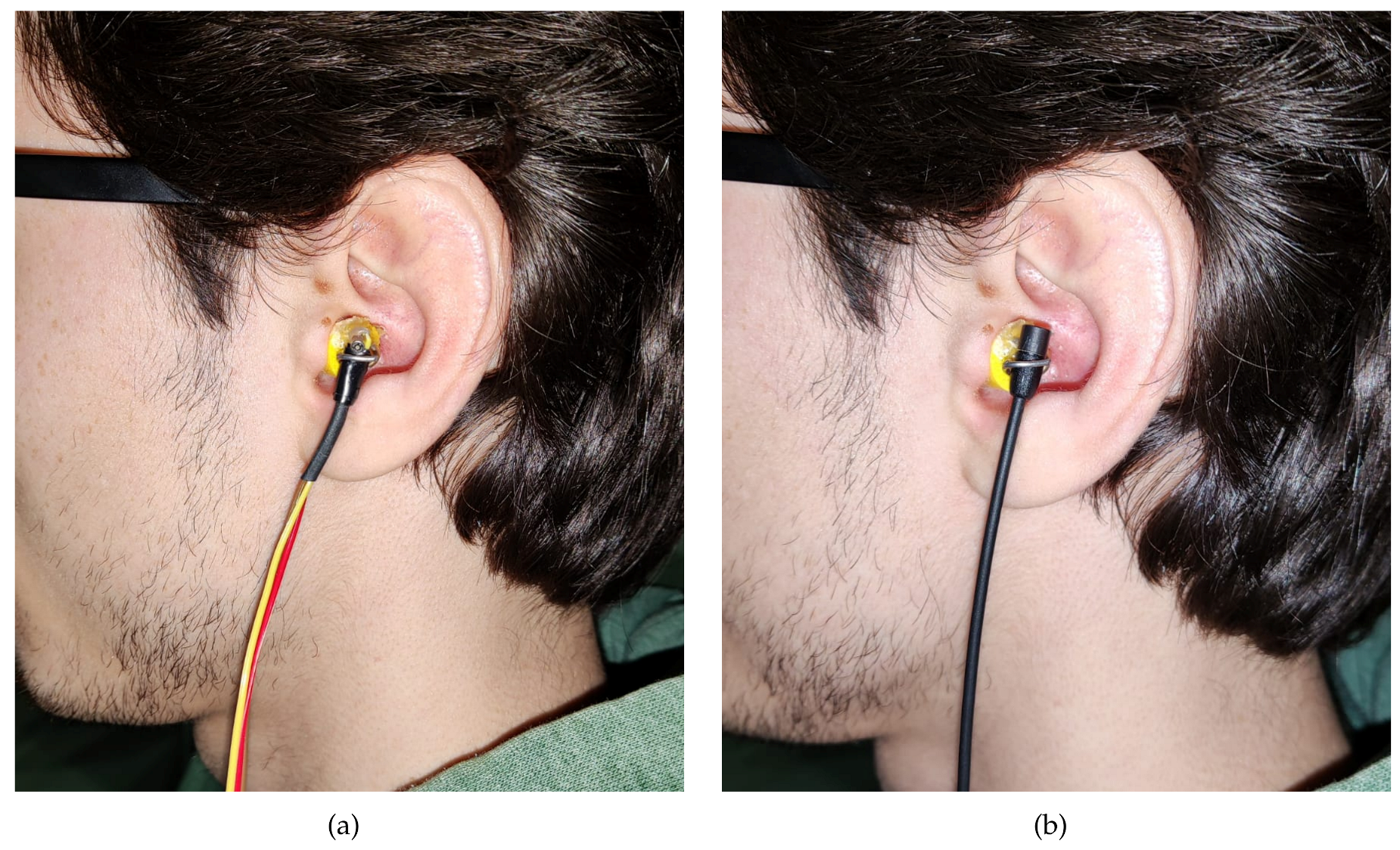
3. Hardware Setup
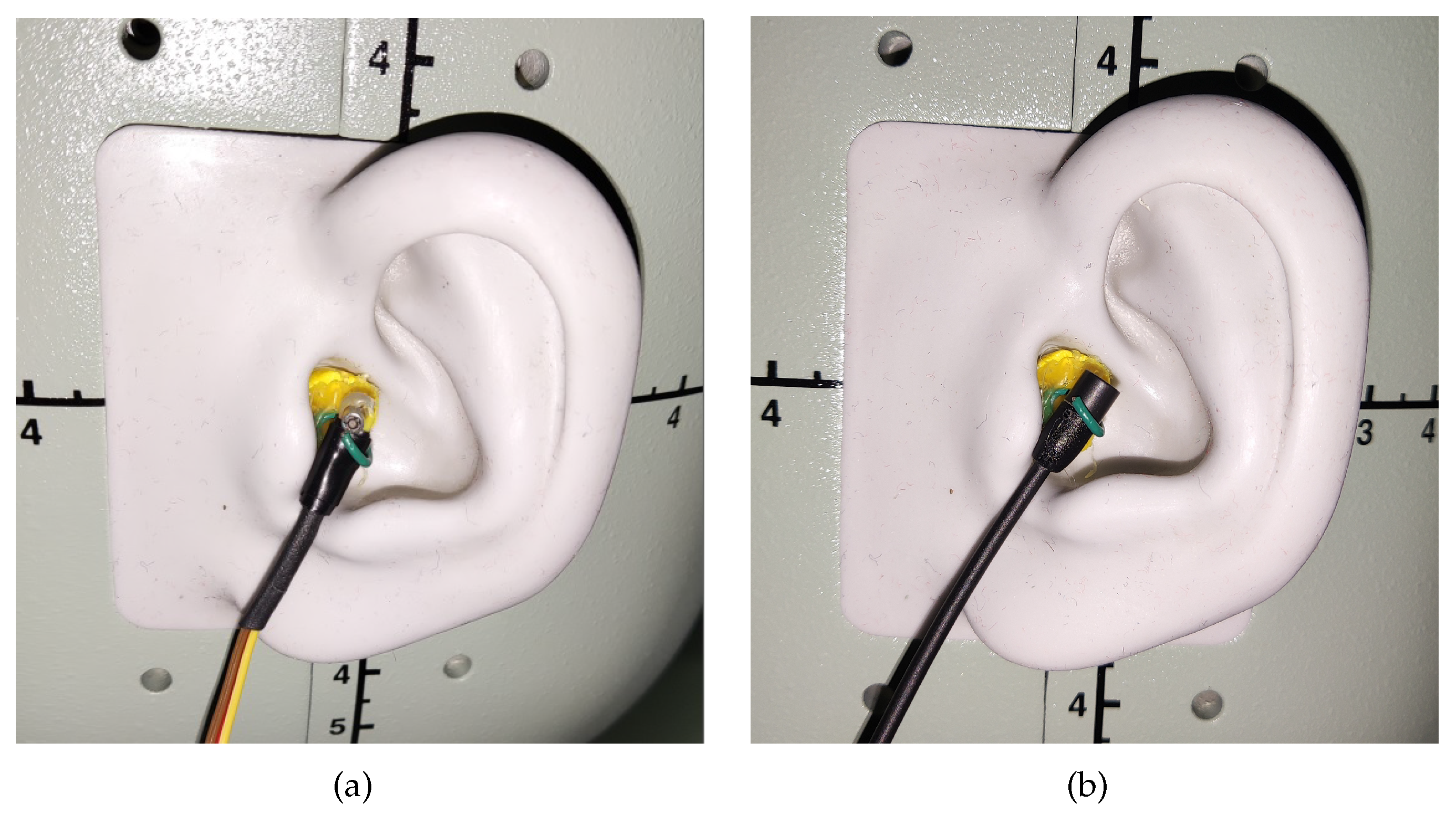
- For the Brüel & Kjær HATS simulator, ;
- For the Knowles microphone, ;
- For the Sennheiser microphone, .
4. Experimental Results
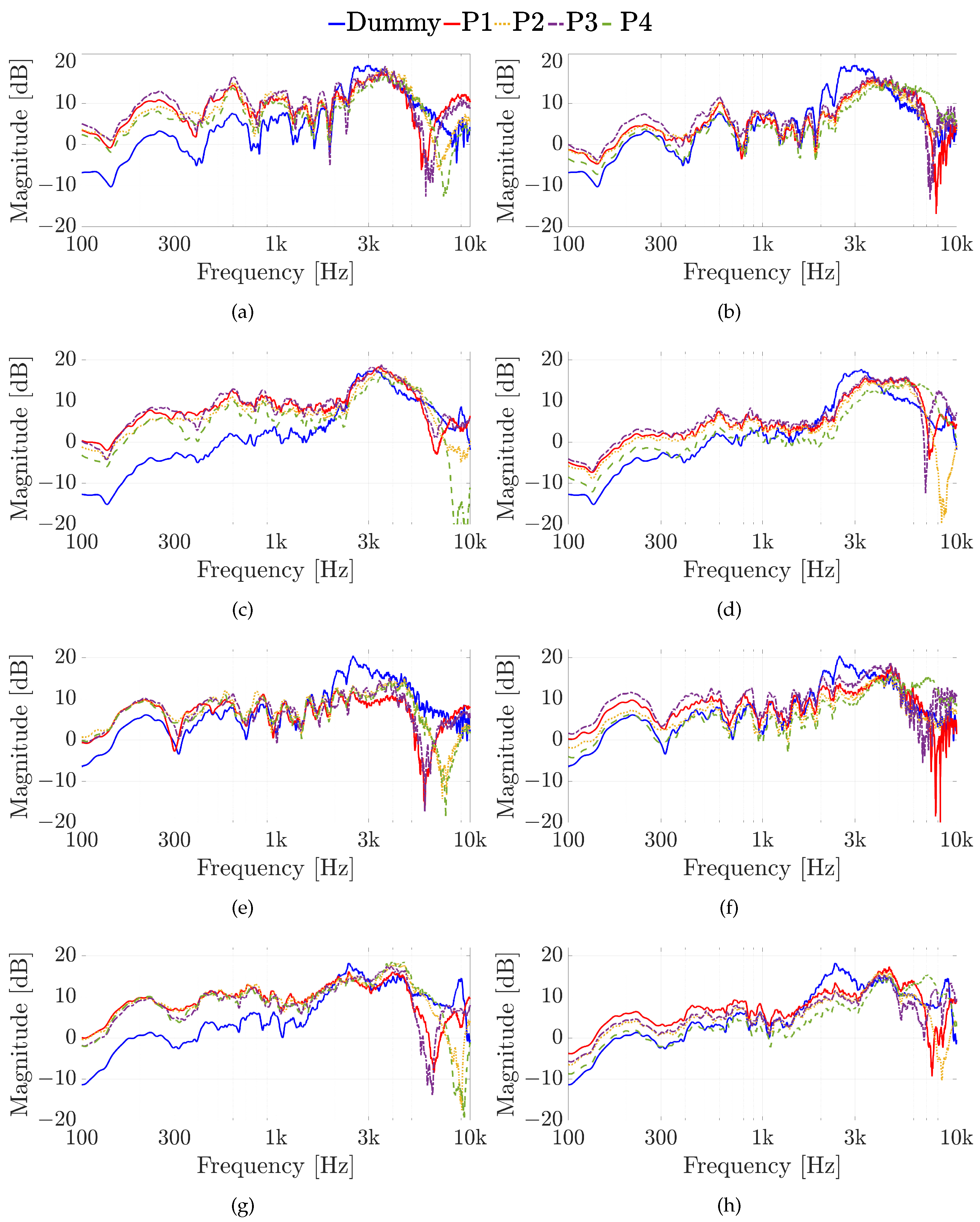
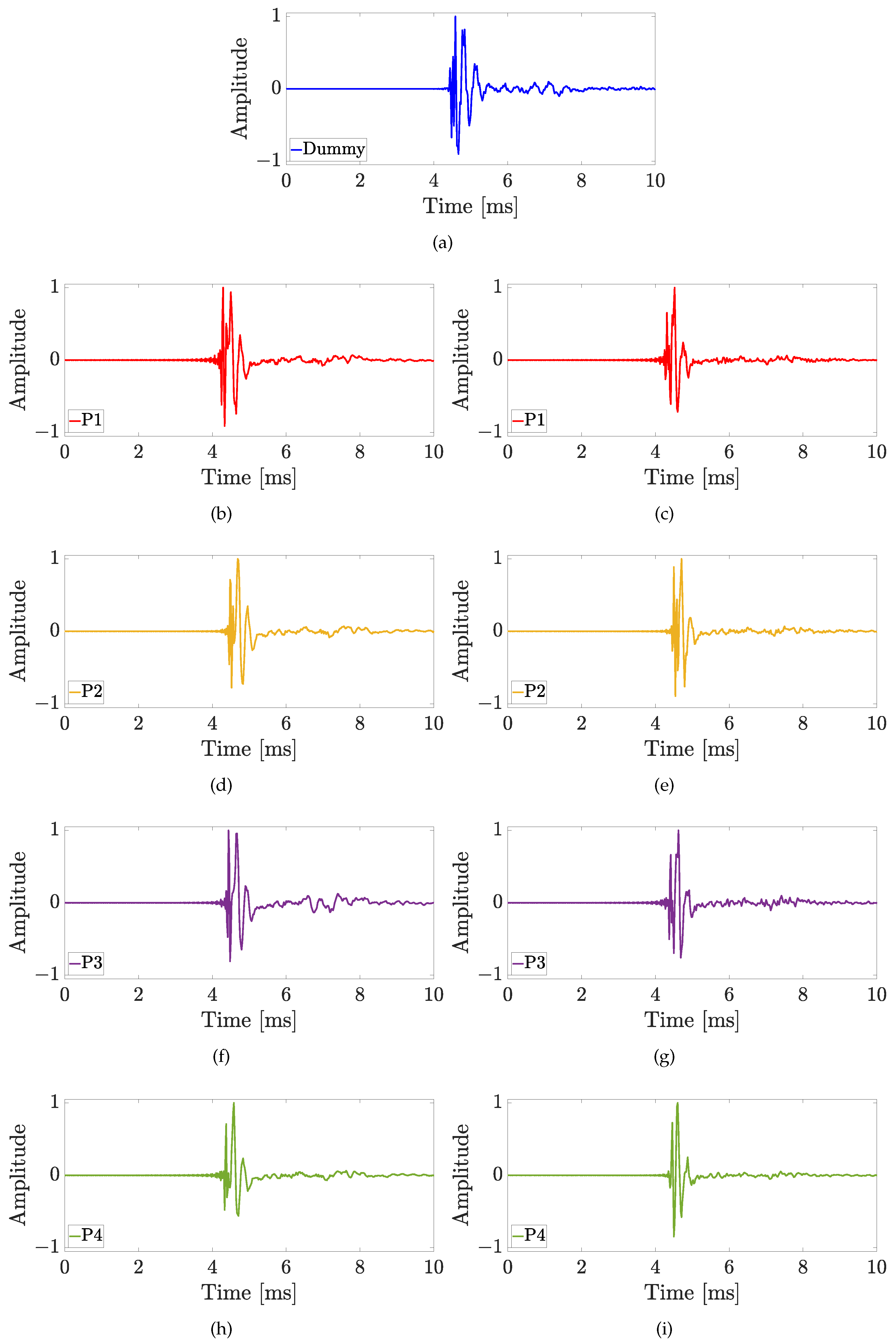
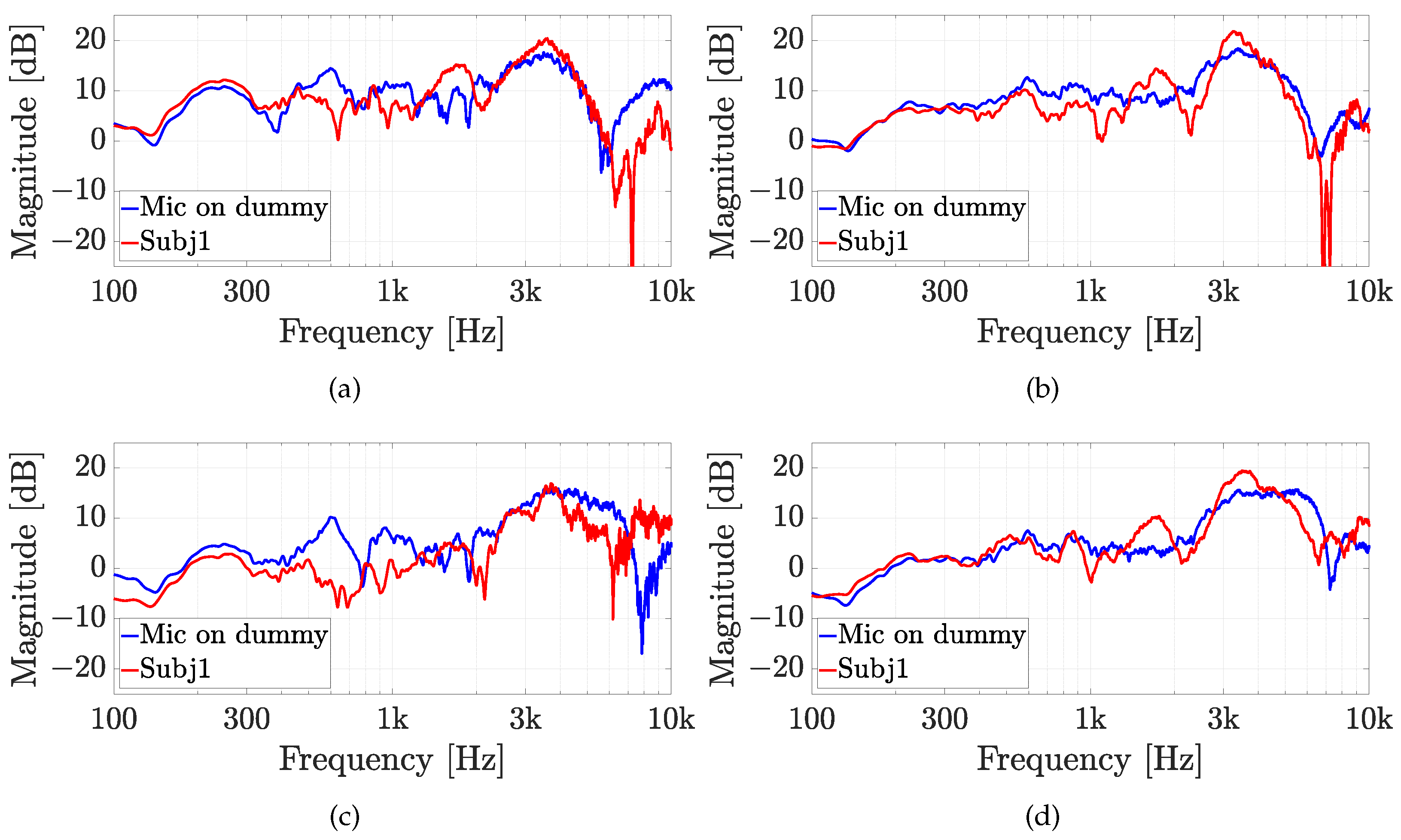
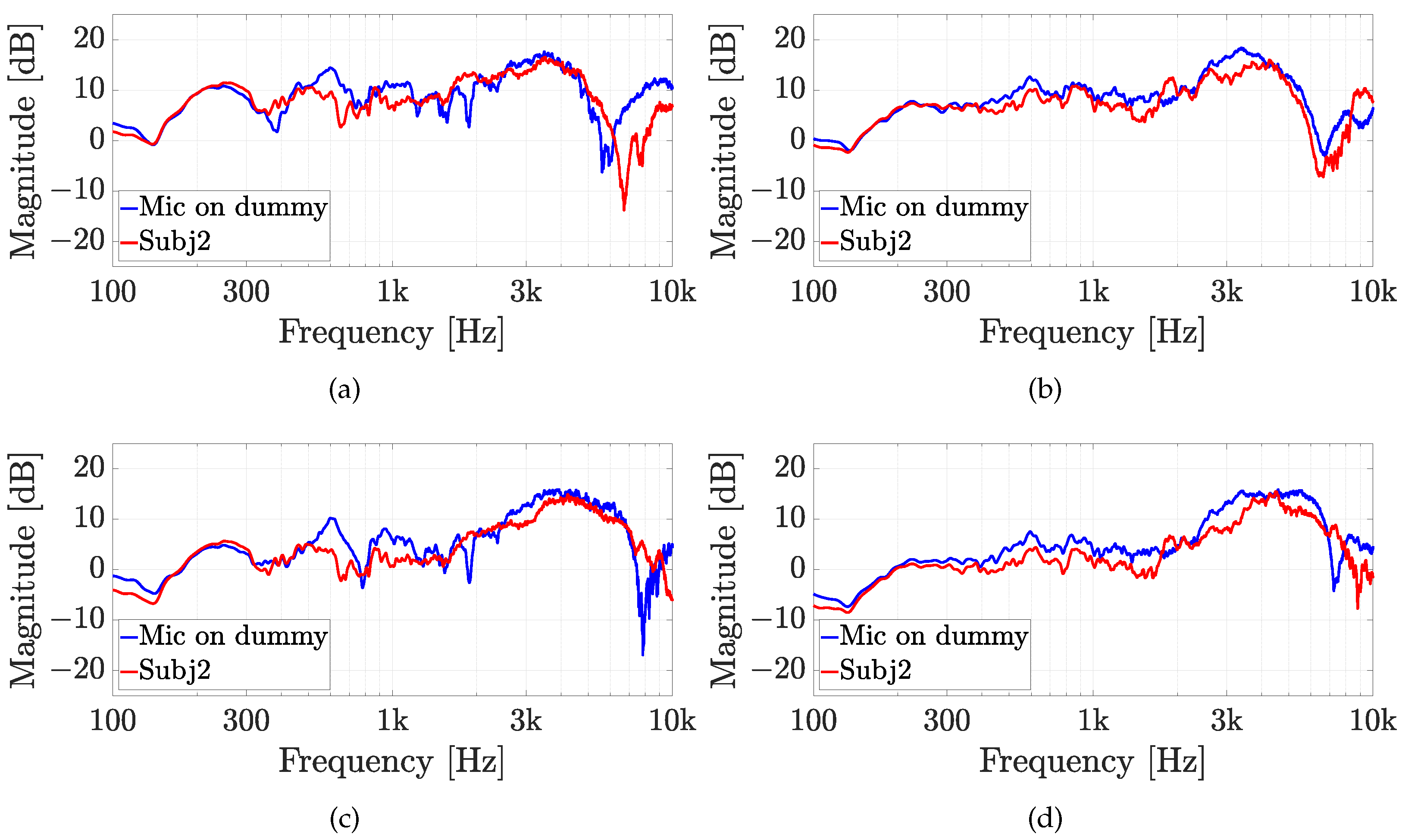
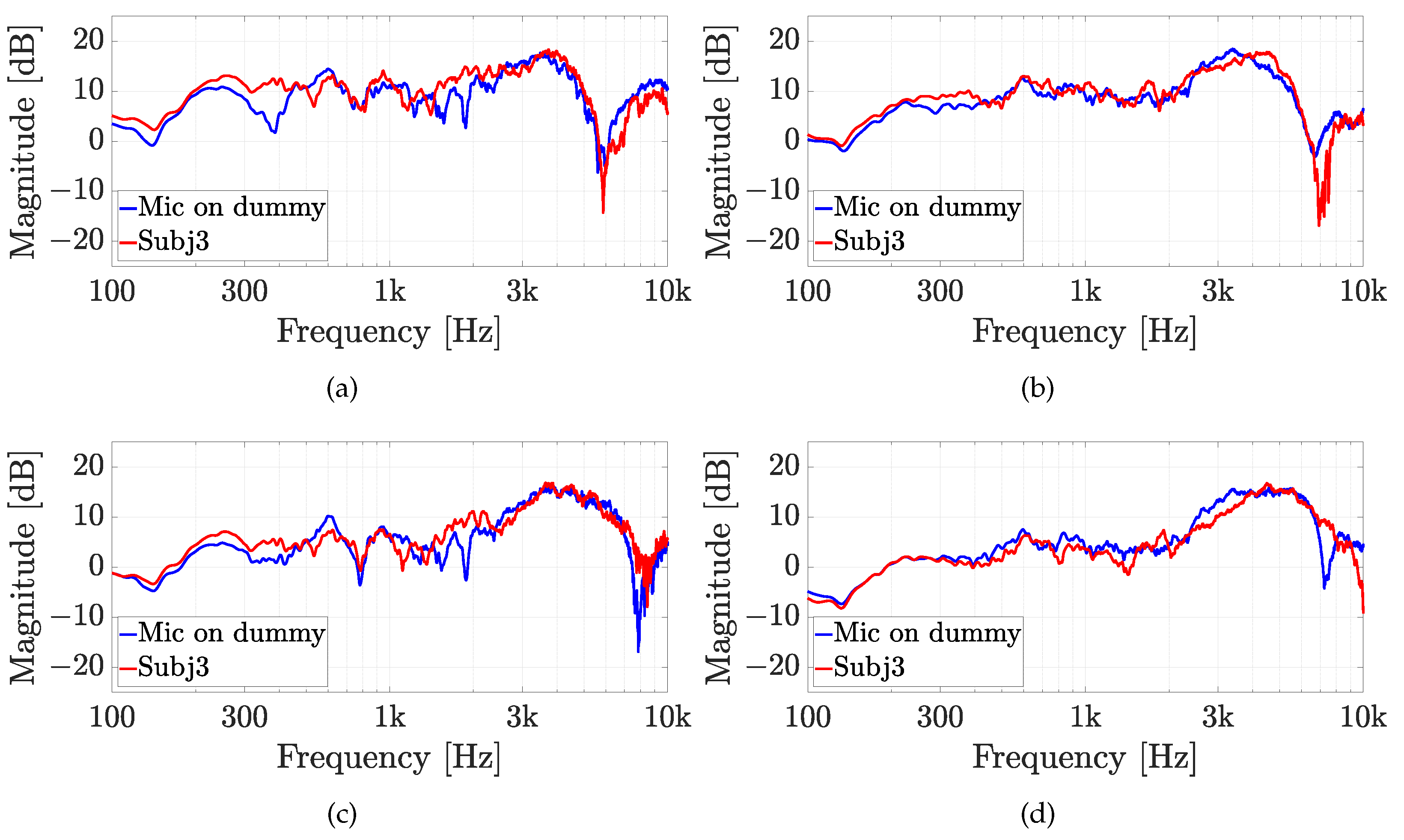
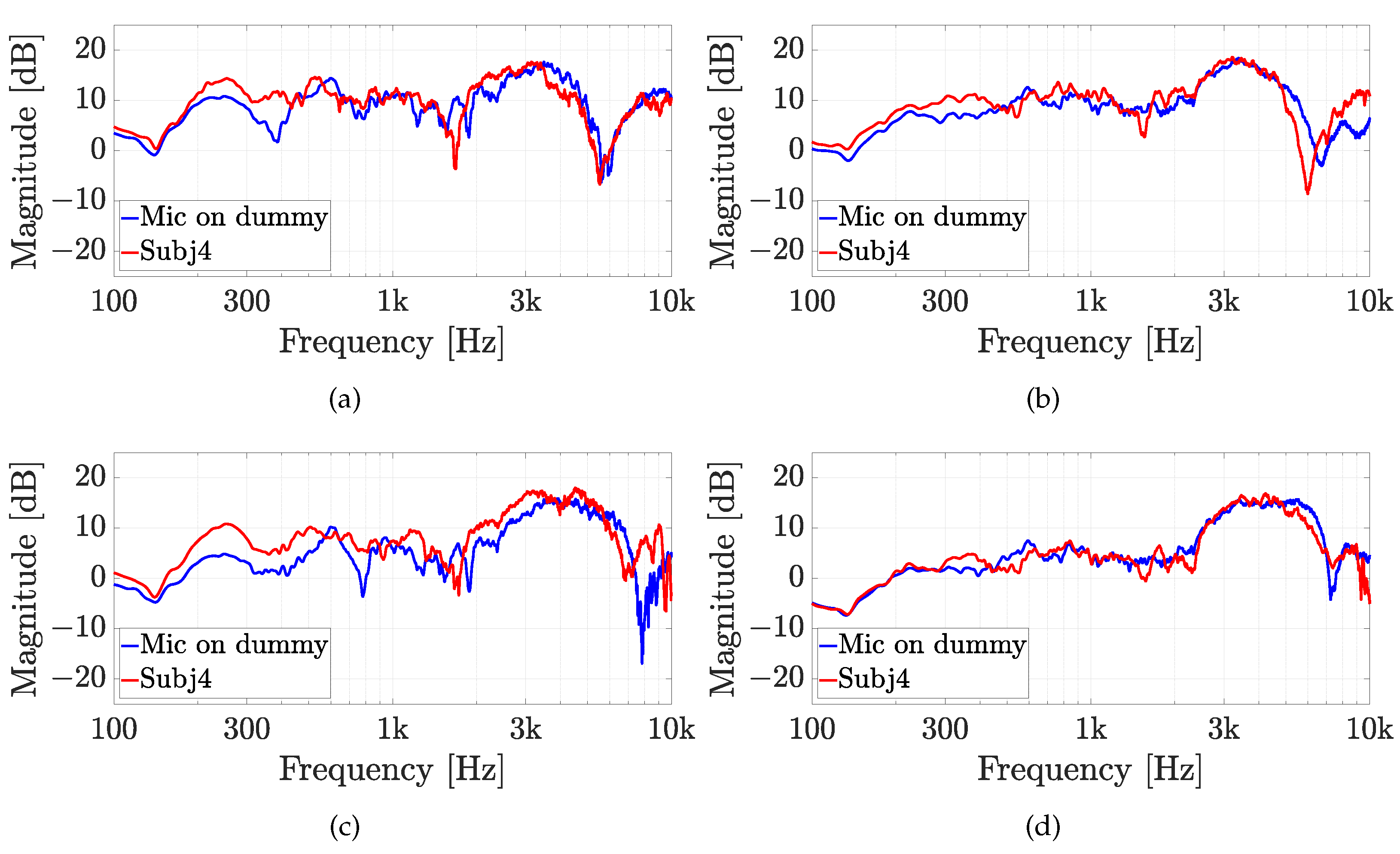
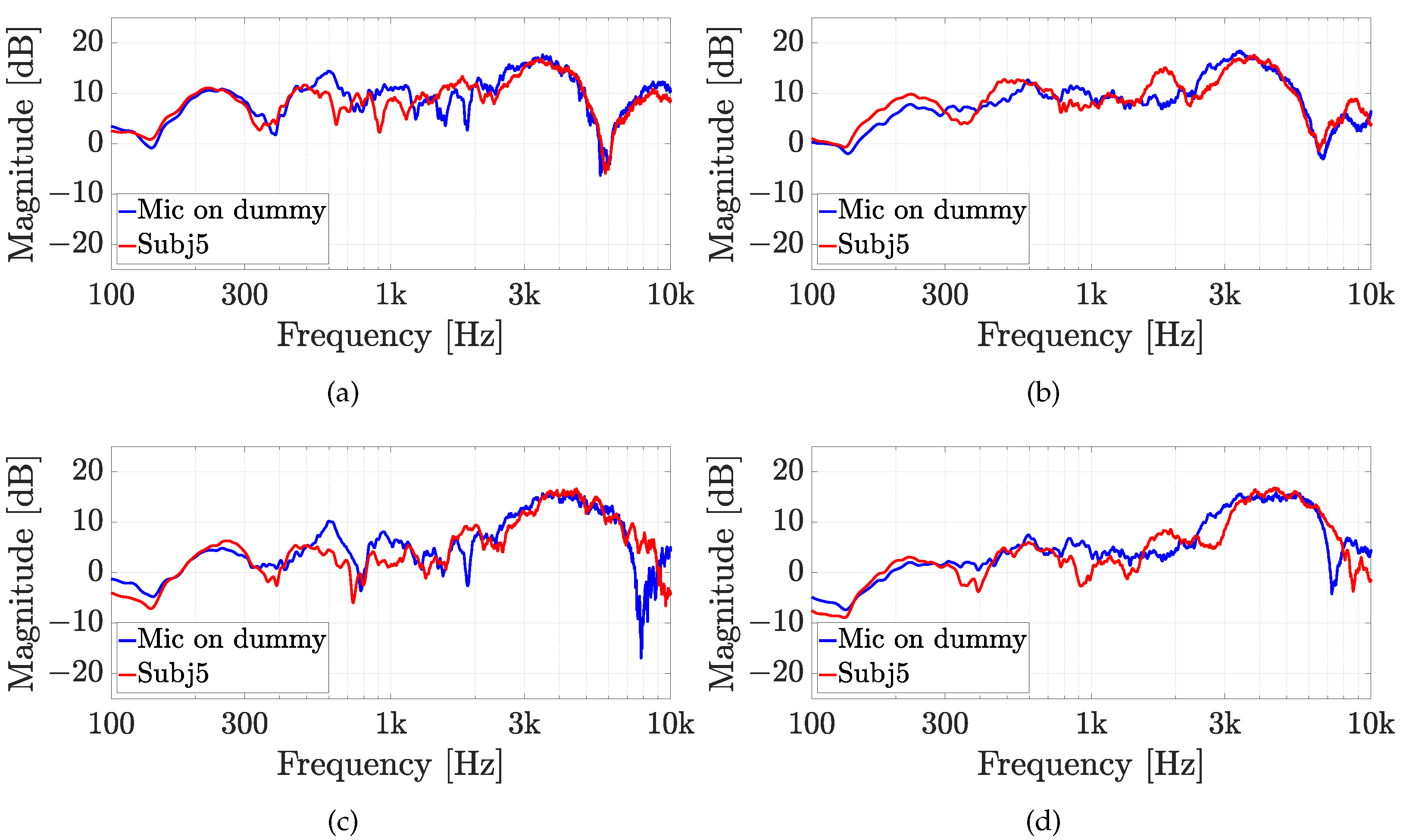
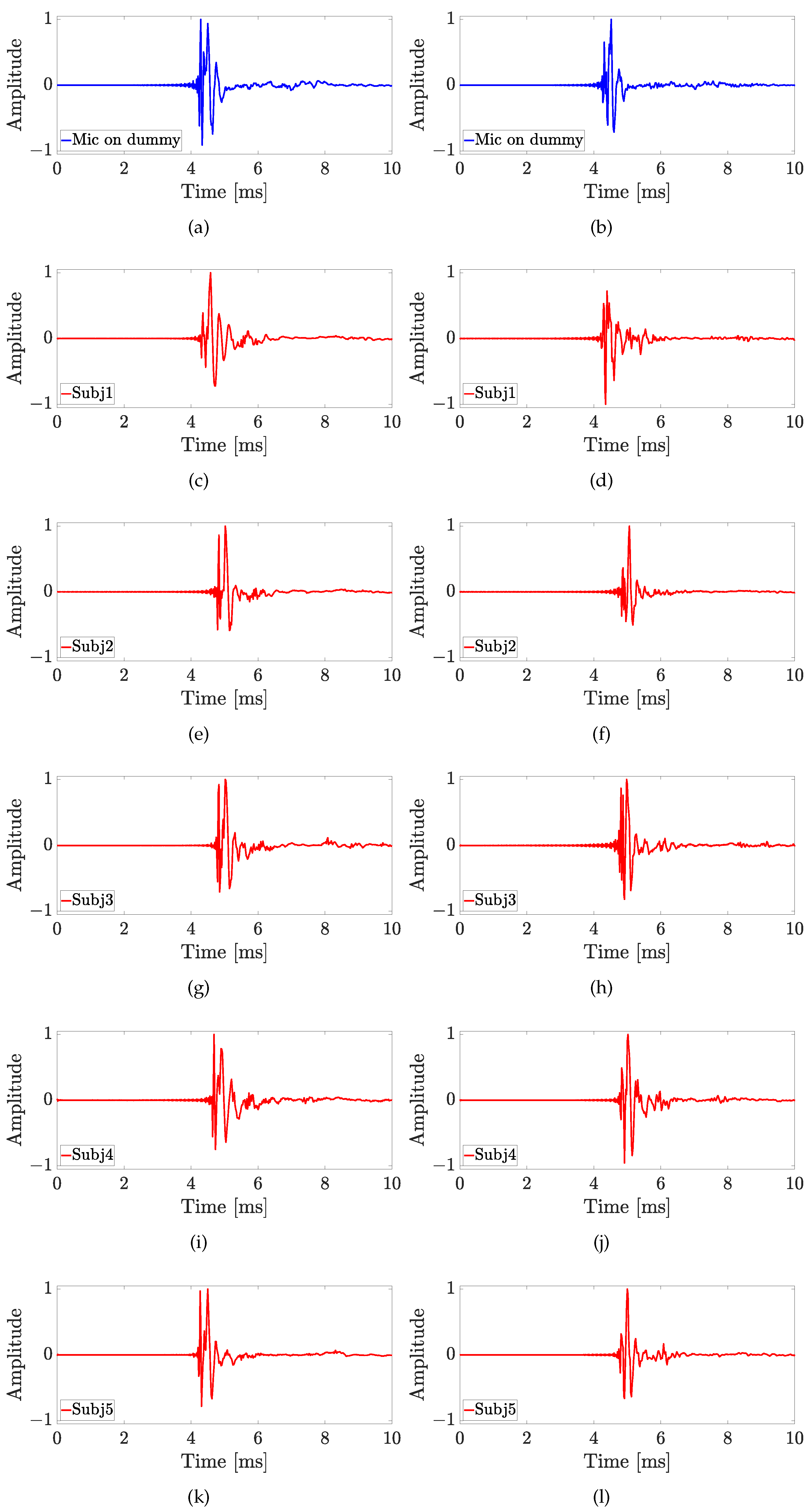
- A comparison of individual HRTFs measured on five real subjects with the two in-ear microphones for different positions of the sound source (see Figure 7).
4.1. Experiment 1
4.2. Experiment 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Iida, K. Head-Related Transfer Function and Acoustic Virtual Reality; Springer: Singapore, 2019. [Google Scholar]
- Rafaely, B.; Tourbabin, V.; Habets, E.; Ben-Hur, Z.; Lee, H.; Gamper, H.; Arbel, L.; Birnie, L.; Abhayapala, T.; Samarasinghe, P. Spatial audio signal processing for binaural reproduction of recorded acoustic scenes–review and challenges. Acta Acust. 2022, 6, 47. [Google Scholar] [CrossRef]
- Cobos, M.; Ahrens, J.; Kowalczyk, K.; Politis, A. An overview of machine learning and other data-based methods for spatial audio capture, processing, and reproduction. EURASIP J. Audio Speech Music Process. 2022, 2022, 1–21. [Google Scholar] [CrossRef]
- Miccini, R.; Spagnol, S. HRTF individualization using deep learning. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Atlanta, GA, USA, 22–26 March 2020; pp. 390–395. [Google Scholar]
- Burkhard, M.; Sachs, R. Anthropometric manikin for acoustic research. J. Acoust. Soc. Am. 1975, 58, 214–222. [Google Scholar] [CrossRef] [PubMed]
- Gardner, B.; Martin, K. HRTF Measurements of a KEMAR Dummy-Head Microphone. In MIT Media Lab Perceptual Computing Technical Report 280; Massachusetts Institute of Technology: Cambridge, MA, USA, 1994. [Google Scholar]
- Bovbjerg, B.P.; Christensen, F.; Minnaar, P.; Chen, X. Measuring the Head-Related Transfer Functions of an Artificial Head with a High-Directional Resolution. In Proceedings of the 109th Convention of the Audio Engineering Society, Los Angeles, CA, USA, 22–25 September 2000. [Google Scholar]
- Richter, J.G.; Fels, J. On the Influence of Continuous Subject Rotation During High-Resolution Head-Related Transfer Function Measurements. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 730–741. [Google Scholar] [CrossRef]
- Wierstorf, H.; Geier, M.; Spors, S. A Free Database of Head Related Impulse Response Measurements in the Horizontal Plane with Multiple Distances. In Proceedings of the 130th Convention of the Audio Engineering Society, London, UK, 13–16 May 2011. [Google Scholar]
- Li, Y.; Preihs, S.; Peissig, J. Acquisition of Continuous-Distance Near-Field Head-Related Transfer Functions on KEMAR Using Adaptive Filtering. In Proceedings of the 152nd Convention of the Audio Engineering Society, The Hague, The Netherlands, 7–8 May 2022. [Google Scholar]
- Hirahara, T.; Sagara, H.; Toshima, I.; Otani, M. Head Movement During Head-Related Transfer Function Measurements. Acoust. Sci. Technol. 2010, 31, 165–171. [Google Scholar] [CrossRef] [Green Version]
- Masiero, B.; Pollow, M.; Fels, J. Design of a fast broadband individual head-related transfer function measurement system. In Proceedings of the Forum Acusticum, Aalborg, Denmark, 27 June–1 July 2011; pp. 2197–2202. [Google Scholar]
- Bolaños, J.G.; Pulkki, V. HRIR Database with Measured Actual Source Direction Data. In Proceedings of the 133rd Convention of the Audio Engineering Society, San Francisco, CA, USA, 26–29 October 2012. [Google Scholar]
- Carpentier, T.; Bahu, H.; Noisternig, M.; Warusfel, O. Measurement of a head-related transfer function database with high spatial resolution. In Proceedings of the 7th Forum Acusticum (EAA), Krakow, Poland, 7–12 September 2014. [Google Scholar]
- Møller, H.; Sørensen, M.F.; Hammershøi, D.; Jensen, C.B. Head-Related Transfer Functions of Human Subjects. J. Audio Eng. Soc. 1995, 43, 300–321. [Google Scholar]
- Yu, G.; Wu, R.; Liu, Y.; Xie, B. Near-Field Head-Related Transfer-Function Measurement and Database of Human Subjects. J. Acoust. Soc. Am. 2018, 143, EL194–EL198. [Google Scholar] [CrossRef] [Green Version]
- Ye, Q.; Dong, Q.; Zhang, Y.; Li, X. Fast head-related transfer function measurement in complex environments. In Proceedings of the 20th International Congress on Acoustics, Sydney, Australia, 23–27 August 2010; pp. 23–27. [Google Scholar]
- Usher, J.; Martens, W.L. Perceived Naturalness of Speech Sounds Presented Using Personalized versus Non-Personalized HRTFs; Georgia Institute of Technology: Atlanta, GA, USA, 2007. [Google Scholar]
- Møller, H.; Sørensen, M.F.; Jensen, C.B.; Hammershøi, D. Binaural technique: Do we need individual recordings? J. Audio Eng. Soc. 1996, 44, 451–469. [Google Scholar]
- Armstrong, C.; Thresh, L.; Murphy, D.; Kearney, G. A Perceptual Evaluation of Individual and Non-Individual HRTFs: A Case Study of the SADIE II Database. Appl. Sci. 2018, 8, 2029. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Peissig, J. Measurement of head-related transfer functions: A review. Appl. Sci. 2020, 10, 5014. [Google Scholar] [CrossRef]
- Mehrgardt, S.; Mellert, V. Transformation characteristics of the external human ear. J. Acoust. Soc. Am. 1977, 61, 1567–1576. [Google Scholar] [CrossRef] [PubMed]
- Wiener, F.M.; Ross, D.A. The pressure distribution in the auditory canal in a progressive sound field. J. Acoust. Soc. Am. 1946, 18, 401–408. [Google Scholar] [CrossRef]
- Searle, C.; Braida, L.; Cuddy, D.; Davis, M. Binaural pinna disparity: Another auditory localization cue. J. Acoust. Soc. Am. 1975, 57, 448–455. [Google Scholar] [CrossRef]
- Middlebrooks, J.C.; Makous, J.C.; Green, D.M. Directional sensitivity of sound-pressure levels in the human ear canal. J. Acoust. Soc. Am. 1989, 86, 89–108. [Google Scholar] [CrossRef]
- Djupesland, G.; Zwislocki, J. Sound pressure distribution in the outer ear. Acta Oto-Laryngol. 1973, 75, 350–352. [Google Scholar] [CrossRef]
- Wiener, F.M. On the diffraction of a progressive sound wave by the human head. J. Acoust. Soc. Am. 1947, 19, 143–146. [Google Scholar] [CrossRef]
- Shaw, E.A. Earcanal pressure generated by a free sound field. J. Acoust. Soc. Am. 1966, 39, 465–470. [Google Scholar] [CrossRef]
- Middlebrooks, J.C. Narrow-band sound localization related to external ear acoustics. J. Acoust. Soc. Am. 1992, 92, 2607–2624. [Google Scholar] [CrossRef] [PubMed]
- Wightman, F.L.; Kistler, D.J. Headphone simulation of free-field listening. I: Stimulus synthesis. J. Acoust. Soc. Am. 1989, 85, 858–867. [Google Scholar] [CrossRef]
- Hellstrom, P.A.; Axelsson, A. Miniature microphone probe tube measurements in the external auditory canal. J. Acoust. Soc. Am. 1993, 93, 907–919. [Google Scholar] [CrossRef]
- Møller, H. Fundamentals of binaural technology. Appl. Acoust. 1992, 36, 171–218. [Google Scholar] [CrossRef] [Green Version]
- Hammershøi, D.; Møller, H. Sound transmission to and within the human ear canal. J. Acoust. Soc. Am. 1996, 100, 408–427. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Algazi, V.R.; Avendano, C.; Thompson, D. Dependence of subject and measurement position in binaural signal acquisition. J. Audio Eng. Soc. 1999, 47, 937–947. [Google Scholar]
- Gardner, B.; Martin, K. HRTF measurements of a KEMAR. J. Acoust. Soc. Am. 1995, 97, 3907–3908. [Google Scholar] [CrossRef]
- Briggs, P.; Godfrey, K. Pseudorandom Signals for the Dynamic Analysis of Multivariable Systems. In Proceedings of the Institution of Electrical Engineers; IET: Stevenage, Hertfordshire, UK, 1966; Volume 113, pp. 1259–1267. [Google Scholar]
- MacWilliams, F.; Sloane, N. Pseudo-random Sequences and Arrays. Proc. IEEE 1976, 64, 1715–1729. [Google Scholar] [CrossRef]
- Schroeder, M.R. Integrated-Impulse Method Measuring Sound Decay Without Using Impulses. J. Acoust. Soc. Am. 1979, 66, 497–500. [Google Scholar] [CrossRef]
- Borish, J.; Angell, J.B. An Efficient Algorithm for Measuring the Impulse Response Using Pseudorandom Noise. J. Audio Eng. Soc. 1983, 31, 478–488. [Google Scholar]
- Mommertz, E.; Müller, S. Measuring impulse responses with digitally pre-emphasized pseudorandom noise derived from maximum-length sequences. Appl. Acoust. 1995, 44, 195–214. [Google Scholar] [CrossRef]
- Ream, N. Nonlinear identification using inverse-repeatm sequences. In Proceedings of the Institution of Electrical Engineers; IET: Stevenage, Hertfordshire, UK, 1970; Volume 117, pp. 213–218. [Google Scholar]
- Dunn, C.; Hawksford, M.J. Distortion Immunity of MLS-derived Impulse Response Measurements. J. Audio Eng. Soc. 1993, 41, 314–335. [Google Scholar]
- Golay, M. Complementary series. IRE Trans. Inf. Theory 1961, 7, 82–87. [Google Scholar] [CrossRef]
- Müller, S.; Massarani, P. Transfer-Function Measurement with Sweeps. J. Audio Eng. Soc. 2001, 49, 443–471. [Google Scholar]
- Müller, S. Measuring Transfer-Functions and Impulse Responses. In Handbook of Signal Processing in Acoustics; Havelock, D., Kuwano, S., Vorländer, M., Eds.; Springer: New York, NY, USA, 2008; pp. 65–85. [Google Scholar] [CrossRef]
- Rothbucher, M.; Veprek, K.; Paukner, P.; Habigt, T.; Diepold, K. Comparison of head-related impulse response measurement approaches. J. Acoust. Soc. Am. 2013, 134, EL223–EL229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Heyser, R.C. Acoustical Measurements by Time Delay Spectrometry. J. Audio Eng. Soc. 1967, 15, 370–382. [Google Scholar]
- Farina, A. Simultaneous Measurement of Impulse Response and Distortion with a Swept-Sine Technique. In Proceedings of the 108th Convention of the Audio Engineering Society, Paris, France, 19–22 February 2000. [Google Scholar]
- Stan, G.B.; Embrechts, J.J.; Archambeau, D. Comparison of Different Impulse Response Measurement Techniques. J. Audio Eng. Soc. 2002, 50, 249–262. [Google Scholar]
- Pulkki, V.; Laitinen, M.V.; Sivonen, V. HRTF measurements with a continuously moving loudspeaker and swept sines. In Proceedings of the 128th Convention of the Audio Engineering Society, London, UK, 22–25 May 2010. [Google Scholar]
- Enzner, G. Analysis and optimal control of LMS-type adaptive filtering for continuous-azimuth acquisition of head related impulse responses. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 393–396. [Google Scholar]
- Correa, C.K.; Li, S.; Peissig, J. Analysis and Comparison of different Adaptive Filtering Algorithms for Fast Continuous HRTF Measurement. In Proceedings of the Tagungsband Fortschritte der Akustik—DAGA, Kiel, Germany, 6–9 March 2017; pp. 6–9. [Google Scholar]
- Haykin, S.S. Adaptive Filter Theory; Pearson Education India: Chennai, India, 2002. [Google Scholar]
- Xie, B. Head-Related Transfer Function and Virtual Auditory Display; J. Ross Publishing: Plantation, FL, USA, 2013. [Google Scholar]
- Carini, A.; Cecchi, S.; Romoli, L.; Sicuranza, G.L. Perfect Periodic Sequences for Legendre Nonlinear Filters. In Proceedings of the 22nd European Signal Processing Conference, Lisbon, Portugal, 1–5 September 2014; pp. 2400–2404. [Google Scholar]
- Carini, A.; Cecchi, S.; Romoli, L. Room Impulse Response Estimation using Perfect sequences for Legendre Nonlinear filters. In Proceedings of the 23nd European Signal Processing Conference, Nice, France, 31 August–4 September 2015. [Google Scholar]
- Carini, A.; Romoli, L.; Cecchi, S.; Orcioni, S. Perfect Periodic Sequences for Nonlinear Wiener Filters. In Proceedings of the 24th European Signal Processing Conference, Budapest, Hungary, 28 August–2 September 2016. [Google Scholar]
- Cecchi, S.; Bruschi, V.; Nobili, S.; Terenzi, A.; Carini, A. Using Periodic Sequences for HRTFs Measurement Robust Towards Nonlinearities in Automotive Audio Applications. In Proceedings of the 2022 IEEE International Workshop on Metrology for Automotive (MetroAutomotive), Modena, Italy, 4–6 July 2022; pp. 99–104. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Romoli, L. Robust room impulse response measurement using perfect sequences for Legendre nonlinear filters. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 1969–1982. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Terenzi, A.; Orcioni, S. On room impulse response measurement using perfect sequences for Wiener nonlinear filters. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 982–986. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Orcioni, S. Robust Room Impulse Response Measurement Using Perfect Periodic Sequences for Wiener Nonlinear Filters. Electronics 2020, 9, 1793. [Google Scholar] [CrossRef]
- Carini, A.; Orcioni, S.; Terenzi, A.; Cecchi, S. Orthogonal periodic sequences for the identification of functional link polynomial filters. IEEE Trans. Signal Process. 2020, 68, 5308–5321. [Google Scholar] [CrossRef]
- Carini, A.; Orcioni, S.; Cecchi, S. On Room Impulse Response Measurement Using Orthogonal Periodic Sequences. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar]
- Carini, A.; Cecchi, S.; Terenzi, A.; Orcioni, S. A Room Impulse Response Measurement Method Robust Towards Nonlinearities Based on Orthogonal Periodic Sequences. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 3104–3117. [Google Scholar] [CrossRef]
- Knowles. FG-23329-D65 Microphones. 2009. Available online: https://www.mouser.it/datasheet/2/218/knowles_corporation_04272020_FG-23329-D65-1840470.pdf (accessed on 17 May 2023).
- Sennheiser. MKE 2-EW GOLD Microphone. Available online: https://assets.sennheiser.com/global-downloads/file/5712/MKE2_Gold_Manual_07_2015_EN.pdf (accessed on 17 May 2023).
- Bruel & Kjaer Head and Torso Simulator (HATS) Type 4128C. 2010. Available online: https://www.bksv.com/en/transducers/simulators/head-and-torso/hats-type-4128c (accessed on 17 May 2023).
- Leaff Engineering. NU-Tech. Available online: https://www.nu-tech-dsp.com/content.php (accessed on 17 May 2023).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source Pos. | Mic. Pos. | Know. | Senn. |
|---|---|---|---|
| , | P1 | 1.9 | 1.4 |
| P2 | 1.4 | 1.1 | |
| P3 | 2.0 | 1.4 | |
| P4 | 1.5 | 1.7 | |
| , | P1 | 1.5 | 1.1 |
| P2 | 1.6 | 2.3 | |
| P3 | 1.3 | 1.4 | |
| P4 | 3.4 | 1.5 | |
| , | P1 | 1.9 | 1.3 |
| P2 | 1.5 | 0.9 | |
| P3 | 1.5 | 1.3 | |
| P4 | 1.6 | 1.7 | |
| , | P1 | 1.9 | 1.7 |
| P2 | 2.6 | 1.9 | |
| P3 | 2.1 | 1.3 | |
| P4 | 3.2 | 1.4 |
| Source Position | Subject | Knowles | Sennheiser |
|---|---|---|---|
| , | Subj1 | 2.3 | 1.9 |
| Subj2 | 1.8 | 1.3 | |
| Subj3 | 2.0 | 1.2 | |
| Subj4 | 2.1 | 1.3 | |
| Subj5 | 1.8 | 1.5 | |
| , | Subj1 | 2.7 | 1.3 |
| Subj2 | 2.0 | 1.3 | |
| Subj3 | 2.2 | 1.3 | |
| Subj4 | 2.1 | 1.1 | |
| Subj4 | 1.6 | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bruschi, V.; Terenzi, A.; Dourou, N.A.; Spinsante, S.; Cecchi, S. Comparative Analysis of HRTFs Measurement Using In-Ear Microphones. Sensors 2023, 23, 6016. https://doi.org/10.3390/s23136016
Bruschi V, Terenzi A, Dourou NA, Spinsante S, Cecchi S. Comparative Analysis of HRTFs Measurement Using In-Ear Microphones. Sensors. 2023; 23(13):6016. https://doi.org/10.3390/s23136016
Chicago/Turabian StyleBruschi, Valeria, Alessandro Terenzi, Nefeli A. Dourou, Susanna Spinsante, and Stefania Cecchi. 2023. "Comparative Analysis of HRTFs Measurement Using In-Ear Microphones" Sensors 23, no. 13: 6016. https://doi.org/10.3390/s23136016
APA StyleBruschi, V., Terenzi, A., Dourou, N. A., Spinsante, S., & Cecchi, S. (2023). Comparative Analysis of HRTFs Measurement Using In-Ear Microphones. Sensors, 23(13), 6016. https://doi.org/10.3390/s23136016