1. Introduction
The failure rate of rolling bearings accounts for about 30% of all rotating machinery failures, which is the main reason affecting the operating efficiency, productivity, and life of mechanical equipment. Almost all rolling bearing fault signals are in a very noisy environment, resulting in early weak faults that are difficult to find. Therefore, how to enhance the signal-to-noise ratio of fault signals under extreme conditions has become a key issue in the direction of fault diagnosis. At the same time, monitoring the status of rolling bearings, promptly identifying faults, and conducting equipment maintenance are of great practical significance for ensuring the smooth working of rotating machinery systems [
1]. Nowadays, the main methods used for rolling bearing fault detection are: wavelet decomposition [
2], empirical mode decomposition [
3], variational mode decomposition [
4], principal component analysis [
5], stochastic resonance [
6], etc. The stochastic resonance algorithm overturns the view that noise is harmful for a long time. It uses the resonance principle to transfer noise energy to the fault signal, thus improving the detection and diagnosis of the fault signal, and opening up a new method and idea for weak bearing fault-signal detection submerged in strong noise.
Benzi raised the concept of stochastic resonance (SR) in 1981 when studying the changes of the Earth’s ice ages [
7]. After 40 years of development, SR theory has been widely used in fault diagnosis [
8], optics [
9], medicine [
10], image denoising [
11], and other fields, and has achieved many remarkable results. The SR algorithm makes use of the synergy generated by the joint excitation of nonlinear systems, input signals, and noise to make Brownian particles oscillate, improve the output signal-to-noise ratio, and effectively detect the measured signal, which is a typical method to enhance the measured signal. Therefore, it is widely concerned with the domain of signal detection [
12]. Classical bistable and monostable SR models have been extensively used in the study of signal detection [
13]. However, for the signal to be measured with ultra-low amplitude, due to the potential function structure constraints, particles are often unable to effectively jump between potential wells, and SR-detection methods for bistable and monostable models are also powerless. When studying multistable stochastic resonance systems, Li et al. found that the multistable model can better enhance the output signal-to-noise ratio and improve the noise utilization ratio than the bistable and monostable models [
14]. Therefore, more and more scholars have carried out relevant research on multistable SR [
15]. For example, Zhang et al. proposed a piecewise unsaturated multistable SR (PUMSR) method which overcomes the weakness of tri-stable SR output saturation and enhances the ability of weak signal detection [
16].
However, whether it is a monostable, bistable, or multistable SR algorithm, it is inevitably difficult to select model parameters in practical applications. Mitaim et al. [
17] put forward the adaptive SR theory to enhance useful signals by automatically adjusting the structural parameters of nonlinear systems. But, the adaptive SR method, which takes a single parameter of the system as the optimization object, often ignores the interaction between the parameters of the system. With the rise of the swarm intelligence optimization algorithm, finding the global optimal solution through the swarm intelligence algorithm can solve the limitations of traditional adaptive SR systems, and this concept has been extensively used in the domain of bearing fault detection [
18]. However, in the existing research results, the adaptive selection of SR model parameters still depends on the performance of intelligent optimization algorithms, so there are generally issues such as a low solving accuracy and being prone to falling into local optima [
19]. Therefore, the feasible method to effectively enhance the parameter performance of adaptive selection of SR systems is to improve the defects of the intelligent optimization algorithm, so that it can more quickly and accurately optimize the parameters of the SR system. The grey wolf optimization algorithm can find the optimal solution by simulating the tracking, encircling, pursuit, and attack stages of the group predation behavior of the grey wolf. With few parameters and a simple structure, it is easy to integrate with other algorithms for improvement, but there are also the problems that it is easy to fall into local optimal solutions and low computational efficiency [
20]. Therefore, it is of great research value to improve the basic grey wolf algorithm and improve its optimization performance [
21]. Vasudha et al. proposed a multi-layer grey wolf optimization algorithm to further achieve an appropriate equivalence between exploration and development, thereby improving the efficiency of the algorithm [
22]. Rajput et al. proposed an FH model based on the sparsity grey wolf optimization algorithm, which helps to minimize the computational overhead and improve the computational accuracy of the algorithm [
23].
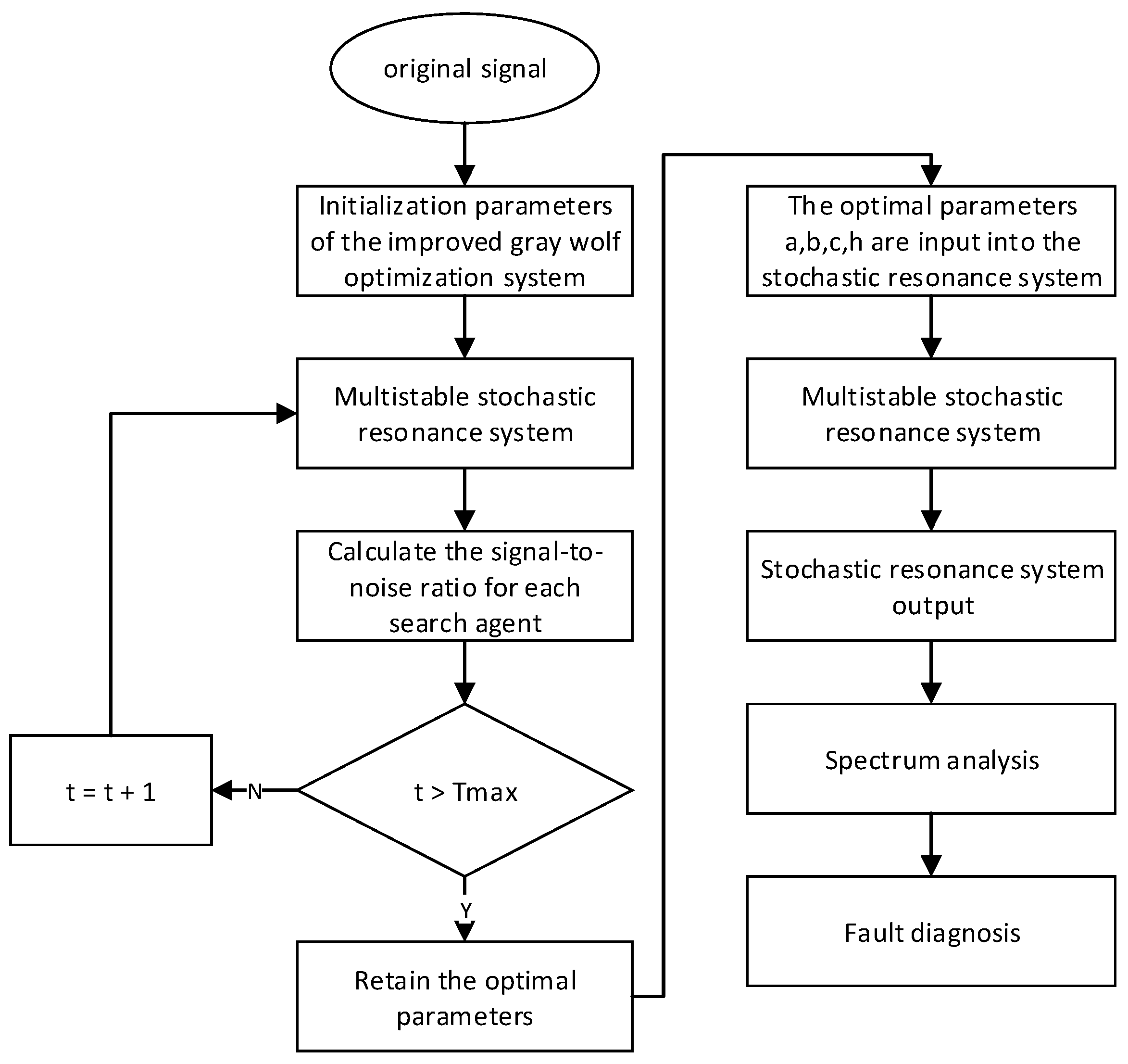
This article takes bearing fault-signal detection as the research object. Aiming at the problem of difficult parameter selection of multistable SR systems, a bearing fault-detection method based on an improved grey wolf algorithm to optimize multistable SR parameters is raised. This method improves the basic grey wolf optimization algorithm. Firstly, considering the quality of the initial solution, a Sobol-sequence initialization population strategy is proposed to make the distribution of the initial grey wolf population more uniform. Secondly, a convergence-factor adjustment strategy based on exponential rules is proposed to coordinate the global exploration and local development stages of the algorithm. Meanwhile, an adaptive position-update strategy is proposed to improve the accuracy of the algorithm, and Cauchy–Gaussian mixture mutation is used to enhance the algorithm’s ability to escape from local optima. Experimental verification is conducted on the performance of the improved grey wolf algorithm using fifteen benchmark test functions from the CEC23 group of commonly used test functions. The verification results display that the multi-strategy improved grey wolf optimization algorithm (MSGWO) has a faster convergence speed and a higher convergence accuracy. Then, on the basis of the model of the multistable SR system, the parameters of the multistable SR system are optimized through the MSGWO, so as to enhance the fault signal and realize the effective detection of the bearing fault signal. Finally, the bearing fault-detection method raised in this article is used to analyze and diagnose a bearing data set from Case Western Reserve University (CWRU) and a bearing data set from the Mechanical Fault Prevention Technology Association (MFPT), and is compared with the optimization results of other improved algorithms. Meanwhile, the method raised in this article is used to diagnose the fault of the bearing of the lifting device of a single-crystal furnace. The test results display that the bearing fault-detection method raised in this article has a fast convergence speed and a large output signal-to-noise ratio, and can detect bearing fault signals accurately and efficiently.
The rest of this article is arranged as below: The
Section 2 introduces the specific cases of bearing failure in rotating machinery in different industries. The
Section 3 introduces the basic principle of multistable SR. The
Section 4 introduces the principle of the basic grey wolf optimization algorithm and the MSGWO, and compares it with some basic optimization algorithms and improved optimization algorithms, respectively. At the same time, the population diversity and the exploration and development stage of the MSGWO are analyzed. The
Section 5 introduces the bearing fault-diagnosis method based on the MSGWO to optimize the multistable SR parameters, and uses the proposed method to analyze and diagnose the bearing data sets from CWRU and the MFPT. Meanwhile, the raised method is used to diagnose the bearing fault of the monocrystal furnace lifting device. The
Section 6 is the summary.
2. Specific Cases of Bearing Failure
Due to the diverse working environments of bearings during the operation of rotating machinery, they are easily affected by wear, corrosion, and other factors, making it easy for various faults to occur. For example, in June 1992, during the overspeed test of a 600 MW supercritical active generator set at the Kansai Electric Power Company Hainan Power Plant in Japan, the bearing failure of the unit and the critical speed drop caused strong vibration of the unit, resulting in a crash accident and economic losses of up to JPY 5 billion. From September 2003 to October 2004, the China Railway Beijing–Shanghai Line, Shitai Line, and Hang-gan Line had a total of five traffic incidents. According to relevant statistics, four of these accidents were caused by train bearing-fatigue fracture, with a total economic loss of up to CNY 2 billion. In April 2015, China Dalian West Pacific Petrochemical Co., LTD., due to the serious distortion and fracture of the inner ring of the driving end bearing and the serious wear and deformation of the bearing ball, the seal of the bottom pump of the stripping tower of a hydrocracking unit quickly failed, and the medium leaked, which caused a fire. The accident caused three pumps, the frame above the pump, and a small number of meters and power cables to set fire; a local pipeline to crack; and direct economic losses of CNY 166,000. In 2018, the US Navy’s “Ford” aircraft carrier had to return to the shipyard for maintenance due to a thrust bearing failure during a mission. In August 2019, when a drone was spraying pesticides at a farm in Hebei, China, its motor rolling bearing failed, causing the drone to lose control, and a large amount of pesticides were spilled into the river, causing serious pollution. In December 2021, there were two recessive cracks in the bearing of unit #33 of a wind farm in Liaoning, China. Due to the limited installation position, the appearance inspection could not find them. As a result, the shaft cracks were promoted by the wind wheel’s alternating load during operation, resulting in a spindle fracture and the impeller’s overall fall. Therefore, the research on fault-diagnosis technology of rolling bearings is very necessary and has great practical significance.
6. Conclusions
Taking bearing fault-signal detection as the research object, this paper proposes a bearing fault-detection method based on an improved grey wolf algorithm to optimize multistable stochastic resonance parameters, aiming at the problems that multistable stochastic resonance system parameters are difficult to select and basic grey wolf optimization algorithm is prone to local optimization and low convergence accuracy. This method improved the grey wolf optimization algorithm. Firstly, the Sobol sequence was used to initialize the grey wolf population to improve the diversity of the population. Secondly, the exponential rule convergence factor was used to balance the global search and local development stages of the algorithm. At the same time, the adaptive position-update strategy was introduced to improve the accuracy of the algorithm. Additionally, we used Cauchy–Gaussian hybrid variation to improve the ability of the algorithm to escape from the local optimal area. The performance of the proposed algorithm was verified using experiments with 15 benchmark test functions in the CEC23 group of common test functions. The results show that the multi-strategy improved grey wolf optimization algorithm has better optimization performance. Then, the improved grey wolf optimization algorithm was used to optimize the parameters of the multistable stochastic resonance algorithm, so as to realize the detection of bearing fault signals. Finally, the bearing data sets of Case Western Reserve University and the Association for Mechanical Fault Prevention Technology were analyzed and diagnosed with the proposed bearing fault-detection method, and the optimization results were compared with other improved algorithms. At the same time, the method proposed in this paper was used to diagnose the fault of the bearing of the lifting device of a single-crystal furnace. The experimental results show that this method can be used to detect the bearing fault signal and can effectively enhance the fault signal in the noise. Compared with other optimized bearing fault-detection methods based on improved intelligent algorithms, the proposed method has the advantages of fast convergence, high parameter optimization accuracy, and strong robustness.
In the future, this paper will study the following two aspects: Firstly, the MSGWO needs to be further improved to improve its stability due to its poor stability in individual test functions. Secondly, the bearing fault-detection method proposed in this paper will be applied to the bearing fault detection of rotating machinery in different industries, and the corresponding improvement will be made according to the actual detection results, so as to improve the applicability of the bearing fault-detection method proposed in this paper to different industries.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}