
Assessment of Fiber Bragg Grating Sensors for Monitoring Shaft Vibrations of Hydraulic Turbines
 , , ,
, , ,  and
and 
Abstract
:1. Introduction
2. Methodology
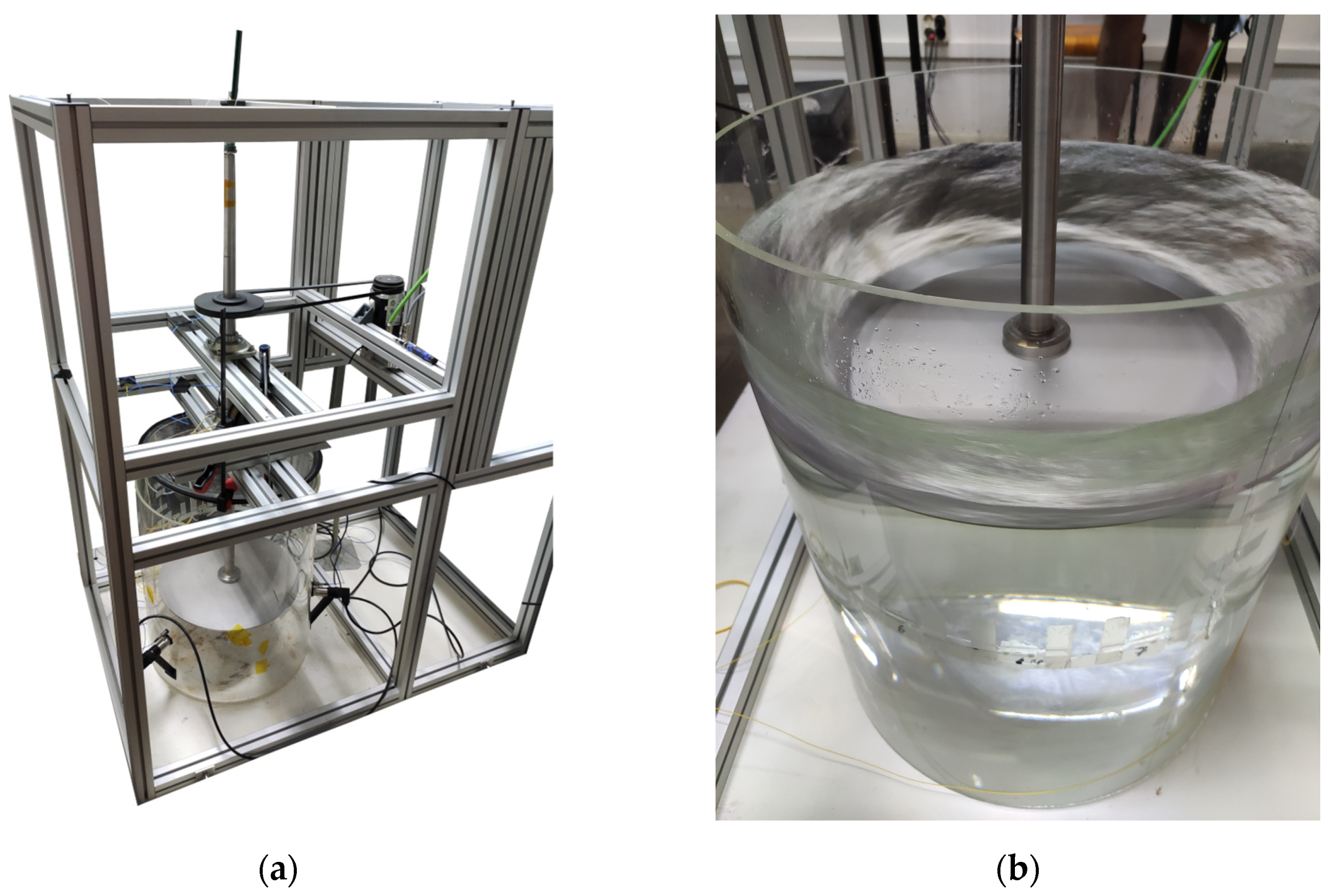
2.1. Experimental Setup
2.1.1. Shaft–Disc assembly
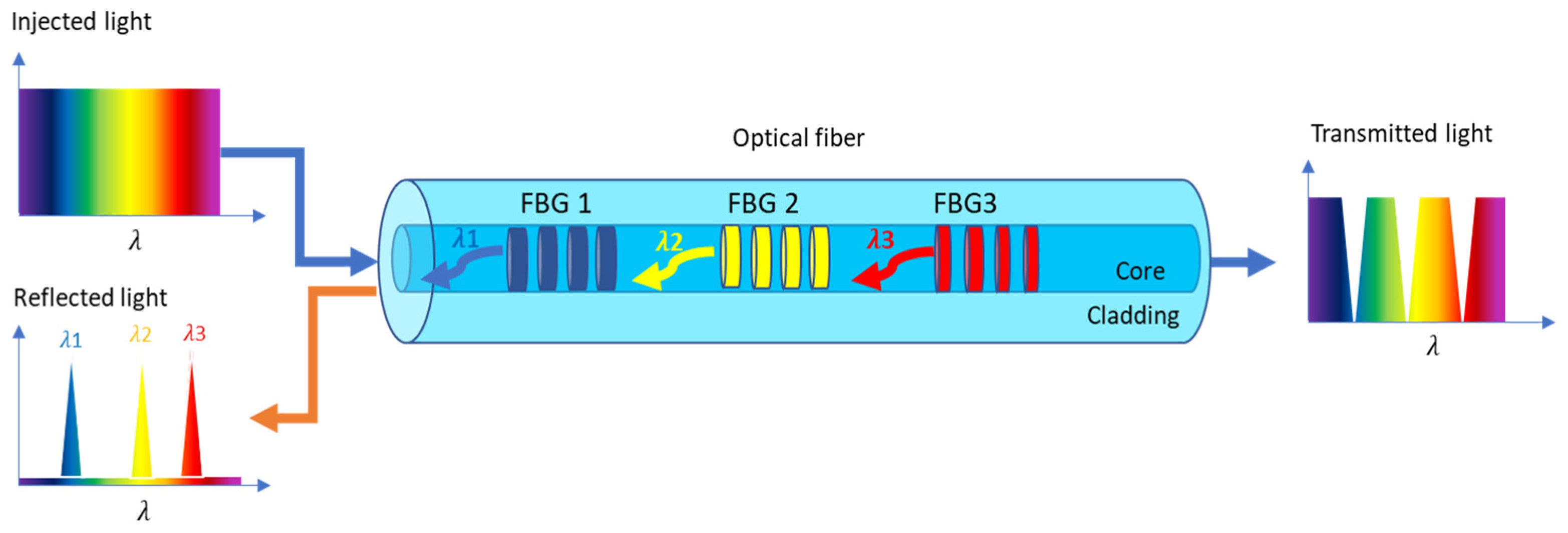
2.1.2. FBG Sensor Assembly
2.1.3. Test Rig
2.1.4. Instrumentation
2.2. Test Campaign
2.2.1. Objective 1: Shaft’s Natural Frequencies and Damping Ratios
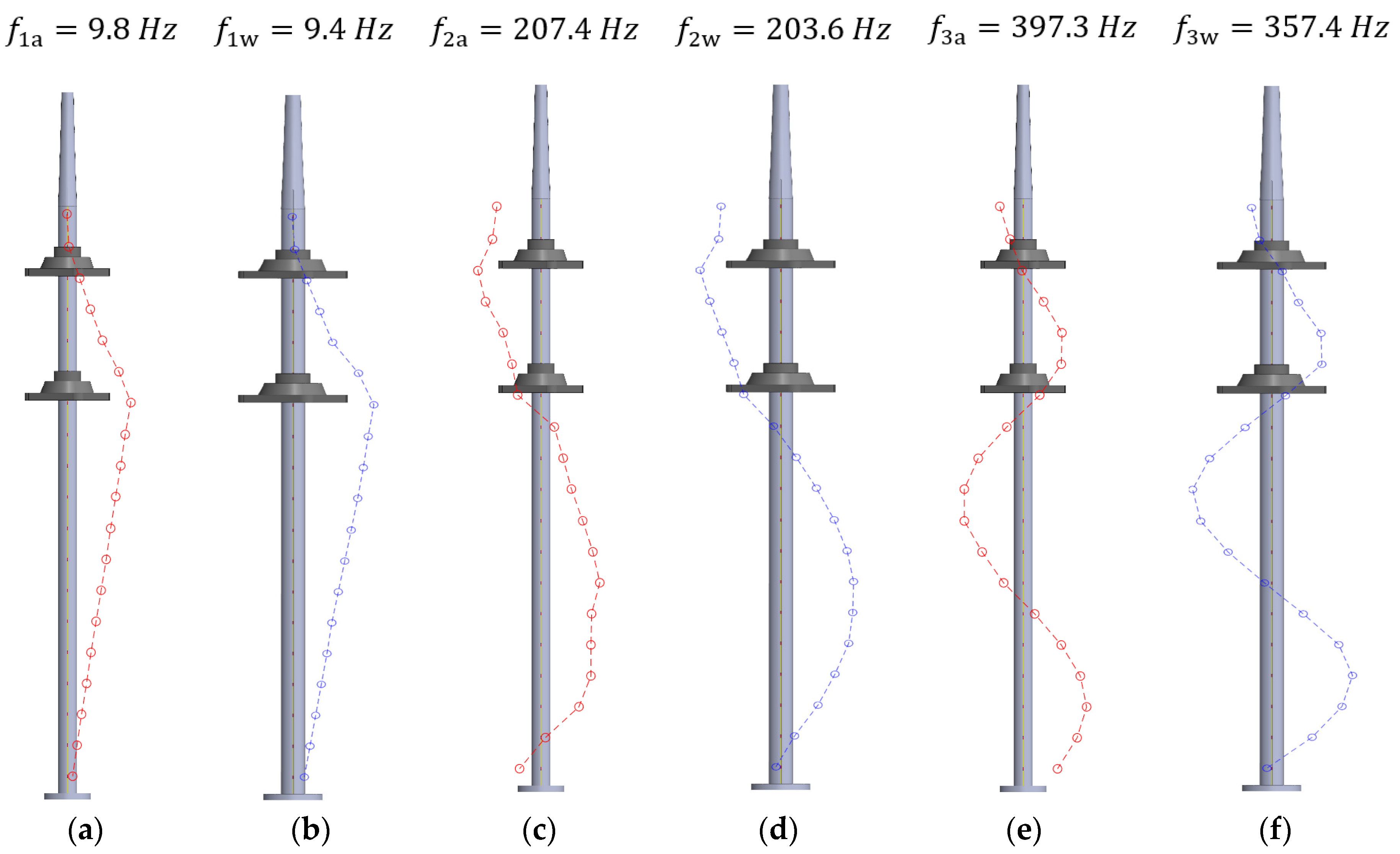
2.2.2. Objective 2: Shaft’s Strain Mode Shapes
2.2.3. Objective 3: On-Board Monitoring in Rotation
2.3. Data Analysis
Postprocessing Workflow
3. Results
3.1. Results Related to Objective 1
3.2. Results Related to Objective 2
3.3. Results Related to Objective 3
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gaudard, L.; Romerio, F. The future of hydropower in Europe: Interconnecting climate, markets and policies. Environ. Sci. Policy 2014, 37, 172–181. [Google Scholar] [CrossRef]
- IRENA. Renewable Energy Techlogies: Cost Analysis Series, Hydropower. 2012. Available online: http://www.irena.org/documentdownloads/publications/re_technologies_cost_analysis-hydropower.pdf (accessed on 12 April 2023).
- Roig, R.; Sánchez-Botello, X.; Escaler, X.; Mulu, B.; Högström, C.-M. On the Rotating Vortex Rope and Its Induced Structural Response in a Kaplan Turbine Model. Energies 2022, 15, 6311. [Google Scholar] [CrossRef]
- Goyal, R.; Gandhi, B.K.; Cervantes, M.J. PIV measurements in Francis turbine—A review and application to transient operations. Renew. Sustain. Energy Rev. 2018, 81, 2976–2991. [Google Scholar] [CrossRef]
- Karpenko, M.; Skačkauskas, P.; Prentkovskis, O. Methodology for the Composite Tire Numerical Simulation Based on the Frequency Response Analysis. Eksploat. I Niezawodn.—Maint. Reliab. 2023, 25, 1–11. [Google Scholar] [CrossRef]
- Active Flow Control System for Improving Hydraulic Turbine Performances at Off-Design Operation. Available online: http://www.afc4hydro.com (accessed on 18 January 2021).
- Lee, B. Review of the present status of optical fiber sensors. Opt. Fiber Technol. 2003, 9, 57–79. [Google Scholar] [CrossRef]
- Floris, J.M.; Adam, P.; Calderón, A.; Sales, S. Fiber Optic Shape Sensors: A comprehensive review. Opt. Lasers Eng. 2021, 139, 106508. [Google Scholar] [CrossRef]
- Campanella, C.E.; Cuccovillo, A.; Campanella, C.; Yurt, A.; Passaro, V.M. Fibre Bragg Grating Based Strain Sensors: Review of Technology and Applications. Sensors 2018, 18, 3115. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Zhou, Z.; Zhang, L.; Chen, J.; Ji, C.; Pham, D. Strain Modal Analysis of Small and Light Pipes Using Distributed Fiber Bragg Grating Sensors. Sensors 2016, 16, 1583. [Google Scholar] [CrossRef] [Green Version]
- López-Higuera, J.M.; Cobo, L.R.; Incera, A.Q.; Cobo, A. Fiber optic sensors in structural health monitoring. J. Light. Technol. 2011, 29, 587–608. [Google Scholar] [CrossRef]
- Sahota, J.K.; Gupta, N.; Dhawan, D. Fiber Bragg grating sensors for monitoring of physical parameters: A comprehensive review. Opt. Eng. 2020, 59, 060901. [Google Scholar] [CrossRef]
- Chen, J.; Liu, B.; Zhang, H. Review of fiber Bragg grating sensor technology. Front. Optoelectron. China 2011, 4, 204–212. [Google Scholar] [CrossRef]
- Mihailov, S.J. Fiber Bragg Grating Sensors for Harsh Environments. Sensors 2012, 12, 1898–1918. [Google Scholar] [CrossRef] [PubMed]
- de la Torre, O.; Floris, I.; Sales, S.; Escaler, X. Fiber Bragg Grating Sensors for Underwater Vibration Measurement: Potential Hydropower Applications. Sensors 2021, 21, 4272. [Google Scholar] [CrossRef]
- Ma, J.; Pei, H.; Zhu, H.; Shi, B.; Yin, J. A review of previous studies on the application of fiber optic sensing technologies in geotechnical monitoring. Rock Mech. Bull. 2023, 2, 200021. [Google Scholar] [CrossRef]
- Kronenberg, P.; Casanova, N.; Inaudi, D.; Vurpillot, S. Dam monitoring with fiber optics deformation sensors. Proc. SPIE-Int. Soc. Opt. Eng. 1997, 3043, 2–11. [Google Scholar] [CrossRef]
- Fuhr, P.L.; Huston, D.R. Corrosion detection in reinforced concrete roadways and bridges via embedded fiber optic sensors. Smart Mater. Struct. 1998, 7, 217–228. [Google Scholar] [CrossRef]
- Henault, J.M.; Moreau, G.; Blairon, S.; Salin, J.; Courivaud, J.R.; Taillade, F.; Merliot, E.; Dubois, J.P.; Bertrand, J.; Buschaert, S.; et al. Truly distributed optical fiber sensors for structural health monitoring: From the telecommunication optical fiber drawling tower to water leakage detection in dikes and concrete structure strain monitoring. Adv. Civ. Eng. 2010, 2010, 930796. [Google Scholar] [CrossRef]
- Artieres, O.; Dortland, G. A fiber optics textile composite sensor for geotechnical applications. Proc. SPIE-Int. Soc. Opt. Eng. 2010, 7653, 475–478. [Google Scholar] [CrossRef]
- SPINNER Group. Single-Channel Fiber Optic Rotary Joints. Available online: https://www.spinner-group.com/en/products/fiber-optic-rotary-joints/single-channel-fiber-optic-rotary-joints (accessed on 14 July 2023).
- Hill, K.O.; Meltz, G. Fiber Bragg grating technology fundamentals and overview. J. Light. Technol. 1997, 15, 1263–1276. [Google Scholar] [CrossRef] [Green Version]
- Tosi, D. Review and analysis of peak tracking techniques for fiber Bragg grating sensors. Sensors 2017, 17, 2368. [Google Scholar] [CrossRef]
- Micron Optics, Inc. Sensing Instrumentation & Software (ENLIGHT). Available online: https://lunainc.com/sites/default/files/assets/files/resource-library/ENLIGHT%20User%20Guide%20-%20Revision%201.139.pdf (accessed on 14 July 2023).
- Loewy, R.G.; Piarulli, V.J. Dynamics of Rotating Shafts; The Shock and Vibration Information Center United States Department of Defense: Washington, DC, USA, 1969.
- Elnady, M.E.; Sinha, J.K.; Oyadiji, S.O. Identification of Critical Speeds of Rotating Machines Using On-Shaft Wireless Vibration Measurement. J. Phys. Conf. Ser. 2012, 364, 012142. [Google Scholar] [CrossRef]
- Ewins, D.J. Modal Testing, 2nd ed.; Research Studies Press: Hertfordshire, UK, 2000. [Google Scholar]
- Juang, J.-N.; Pappa, R. An Eigensystem Realization Algorithm for Modal Parameter Identification and Model Reduction. J. Guid. Control Dyn. 1985, 8, 620–627. [Google Scholar] [CrossRef] [Green Version]
- Caicedo, J.M. Practical Guidelines for the Natural Excitation Technique (next) and the Eigensystem Realization Algorithm (Era) for Modal Identification Using Ambient Vibration. Exp. Tech. 2011, 35, 52–58. [Google Scholar] [CrossRef]
- Cooper, J.E.; Wright, J.R. Spacecraft In-Orbit Identification Using Eigensystem Realization Methods. J. Guid. Control Dyn. 1992, 15, 352–359. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | Shaft Boundary Condition | Disc |
|---|---|---|
| 1 | Hanging | No |
| 2 | Installed (Position 0) | No |
| 3 | Installed (Position 0) | Yes |
| Test | Shaft Boundary Condition | Submerged |
|---|---|---|
| 4 | Installed, Position 1 | No |
| 5 | Installed, Position 1 | Yes |
| 6 | Installed, Position 2 | No |
| 7 | Installed, Position 2 | Yes |
| Test | Shaft Boundary Condition | Shaft Rotating Speed (rpm) | Submerged | Test Type |
|---|---|---|---|---|
| 8 | Installed, Position 3 | 0 | No | Impact |
| 9 | Installed, Position 3 | 60 | No | Impact |
| 10 | Installed, Position 3 | 180 | No | Impact |
| 11 | Installed, Position 3 | 300 | No | Impact |
| 12 | Installed, Position 3 | 50, 100, 150, 200, 250, 300 | Yes | Monitor |
| 13 | Installed, Position 3 | 50, 100, 150, 200, 250, 300 | Yes 1 | Monitor |
| 14 | Installed, Position 4 | From 0 to 200 | Yes 2 | Monitor |
| 15 | Installed, Position 4 | From 0 to 300 | Yes 2 | Monitor |
| Test 1 | Test 2 (Position 0) | Test 3 (Position 0) | |
|---|---|---|---|
| 101.5 ± 0.1 | 30.3 ± 0.3 | 12.3 ± 0.1 | |
| 284.5 ± 0.3 | 74.7 ± 0.4 | 51.2 ± 0.0 | |
| 435.5 ± 0.8 | 391.4 ± 0.2 | 334.8 ± 0.1 | |
| 0.9 ± 0.1 | 4.4 ± 1.4 | 2.8 ± 0.3 | |
| 0.8 ± 0.1 | 3.5 ± 0.5 | 1.4 ± 0.0 | |
| 1.0 ± 0.2 | 0.7 ± 0.1 | 0.4 + 0.1 |
| Position 1 | Position 2 | |||
|---|---|---|---|---|
| Air | Water | Air | Water | |
| 13.2 ± 0.2 | 12.2 ± 0.1 | 9.8 ± 0.1 | 9.4 ± 0.1 | |
| - | - | 207.4 ± 0.6 | 203.6 ± 0.2 | |
| 334.7 ± 0.4 | 326.0 ± 0.1 | 397.3 ± 0.7 | 357.4 ± 0.5 | |
| 4.02 ± 0.83 | 4.29 ± 0.15 | 3.80 ± 0.21 | 4.08 ± 0.31 | |
| - | - | 1.23 ± 0.11 | 0.82 ± 0.07 | |
| 0.92 ± 0.12 | 0.92 ± 0.06 | 0.56 ± 0.08 | 1.20 ± 0.20 | |
| 0 rpm | 60 rpm | 180 rpm | 300 rpm | |
|---|---|---|---|---|
| 11.9 ± 0.2 | 13.5 ± 0.2 | 15.2 ± 0.2 | 17.6 ± 1.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez-Botello, X.; Roig, R.; de la Torre, O.; Madrigal, J.; Sales, S.; Escaler, X. Assessment of Fiber Bragg Grating Sensors for Monitoring Shaft Vibrations of Hydraulic Turbines. Sensors 2023, 23, 6695. https://doi.org/10.3390/s23156695
Sánchez-Botello X, Roig R, de la Torre O, Madrigal J, Sales S, Escaler X. Assessment of Fiber Bragg Grating Sensors for Monitoring Shaft Vibrations of Hydraulic Turbines. Sensors. 2023; 23(15):6695. https://doi.org/10.3390/s23156695
Chicago/Turabian StyleSánchez-Botello, Xavier, Rafel Roig, Oscar de la Torre, Javier Madrigal, Salvador Sales, and Xavier Escaler. 2023. "Assessment of Fiber Bragg Grating Sensors for Monitoring Shaft Vibrations of Hydraulic Turbines" Sensors 23, no. 15: 6695. https://doi.org/10.3390/s23156695
APA StyleSánchez-Botello, X., Roig, R., de la Torre, O., Madrigal, J., Sales, S., & Escaler, X. (2023). Assessment of Fiber Bragg Grating Sensors for Monitoring Shaft Vibrations of Hydraulic Turbines. Sensors, 23(15), 6695. https://doi.org/10.3390/s23156695