A Cooperative Hunting Method for Multi-USV Based on the A* Algorithm in an Environment with Obstacles

 ,
,
Abstract
:1. Introduction
- (1)
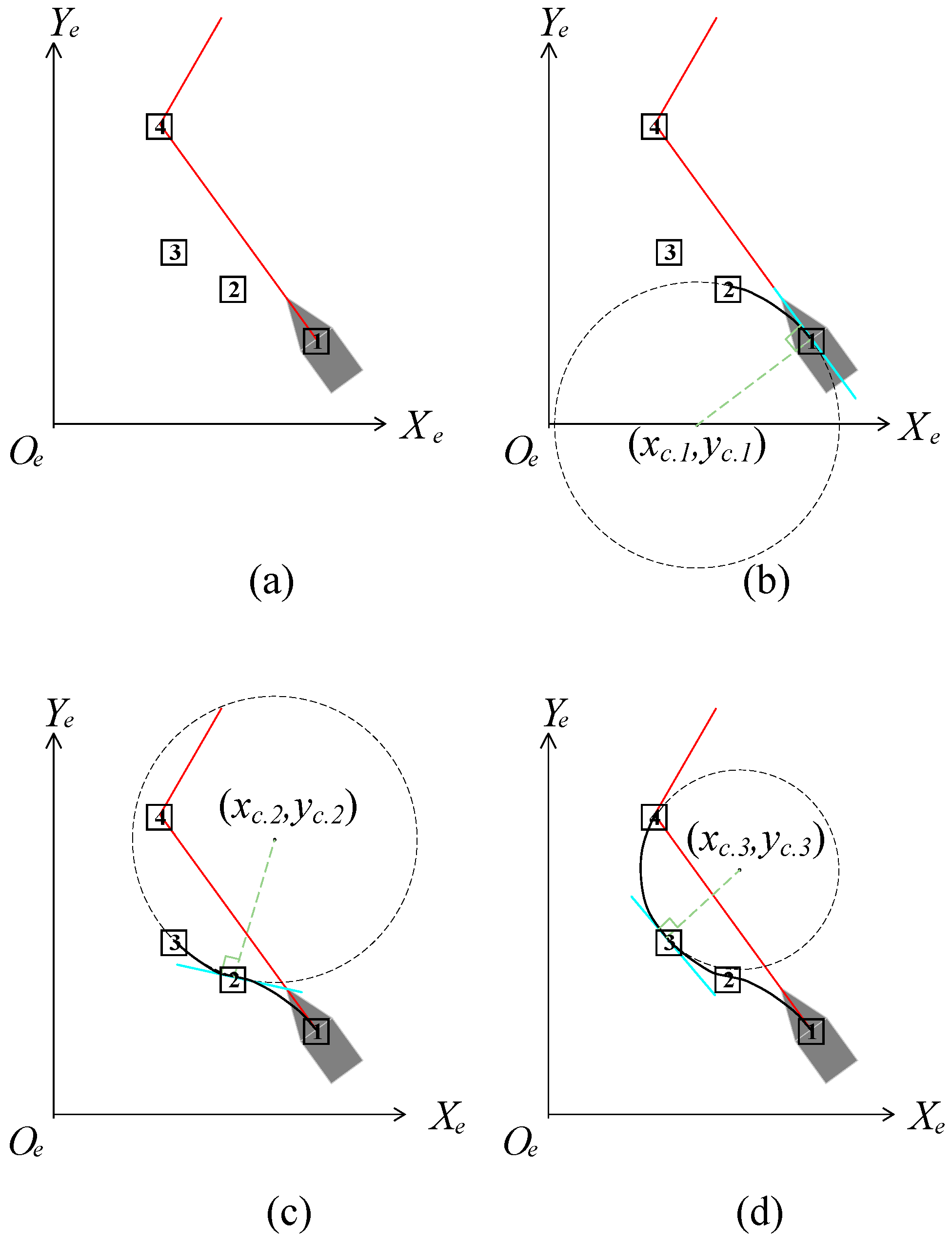
- A path smoothing method based on USV minimum turning radius was proposed. Based on the A* algorithm, select a new path node and connect it to an arc to make the path smoother. At the same time, the reverse traversal recursive algorithm in the Binary tree method is used to replace the enumeration algorithm to obtain the optimal path, which improves the efficiency of the algorithm and shortens the planning time of the algorithm.
- (2)
- A biomimetic based multi-USV collaborative hunting method is proposed. The preformation of multiple USV groups is conducted independently on the path. Multiple USV groups do not require manual formation. The universality of this algorithm has been improved. In the hunting process, the formation of multiple USV groups is adjusted to limit the movement and rotation of the target, effectively reducing the range of target activities, and improving the effectiveness of the algorithm.
2. Preliminaries
2.1. A* Algorithm
2.2. Binary Tree Method
3. Modeling
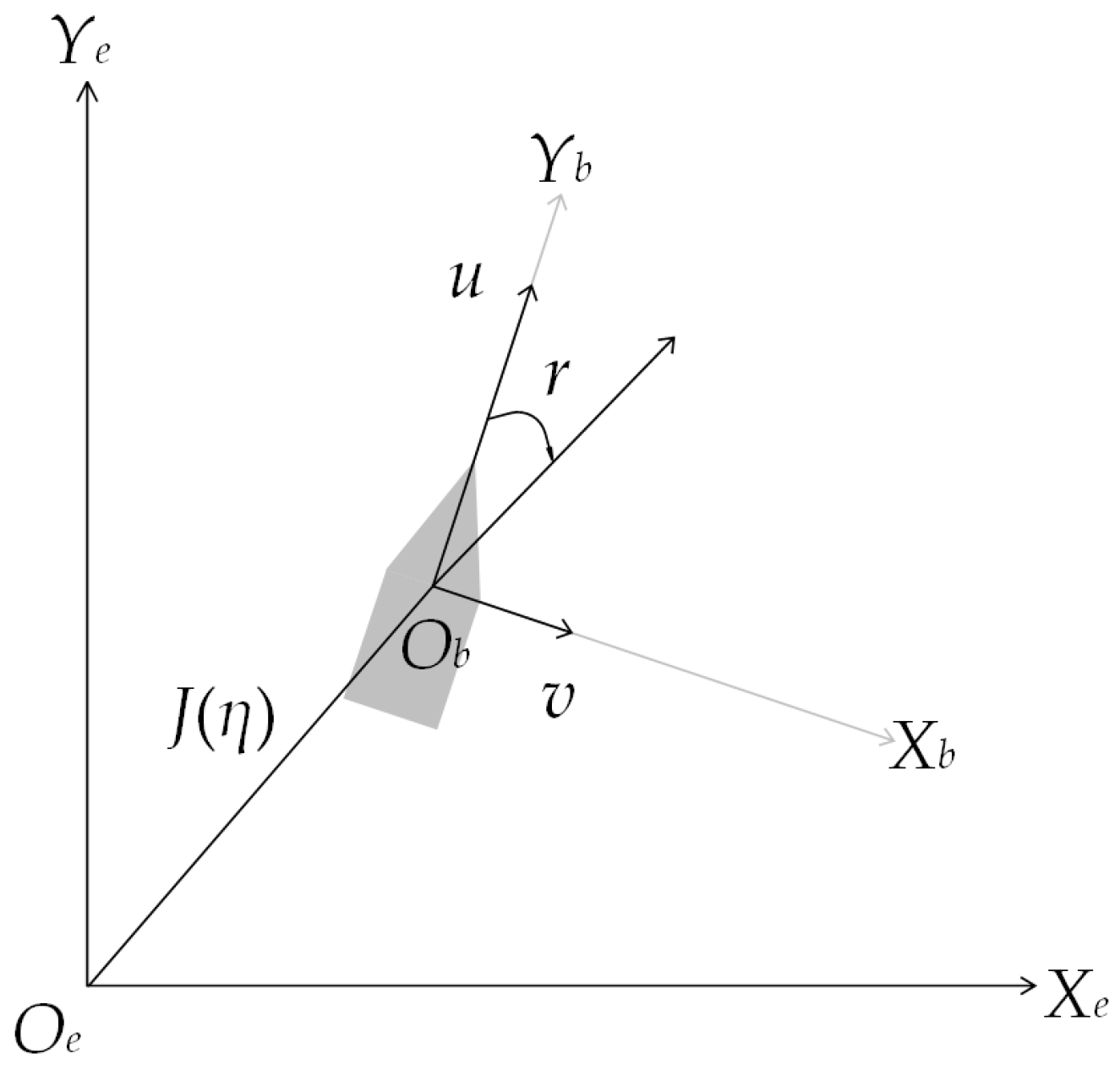
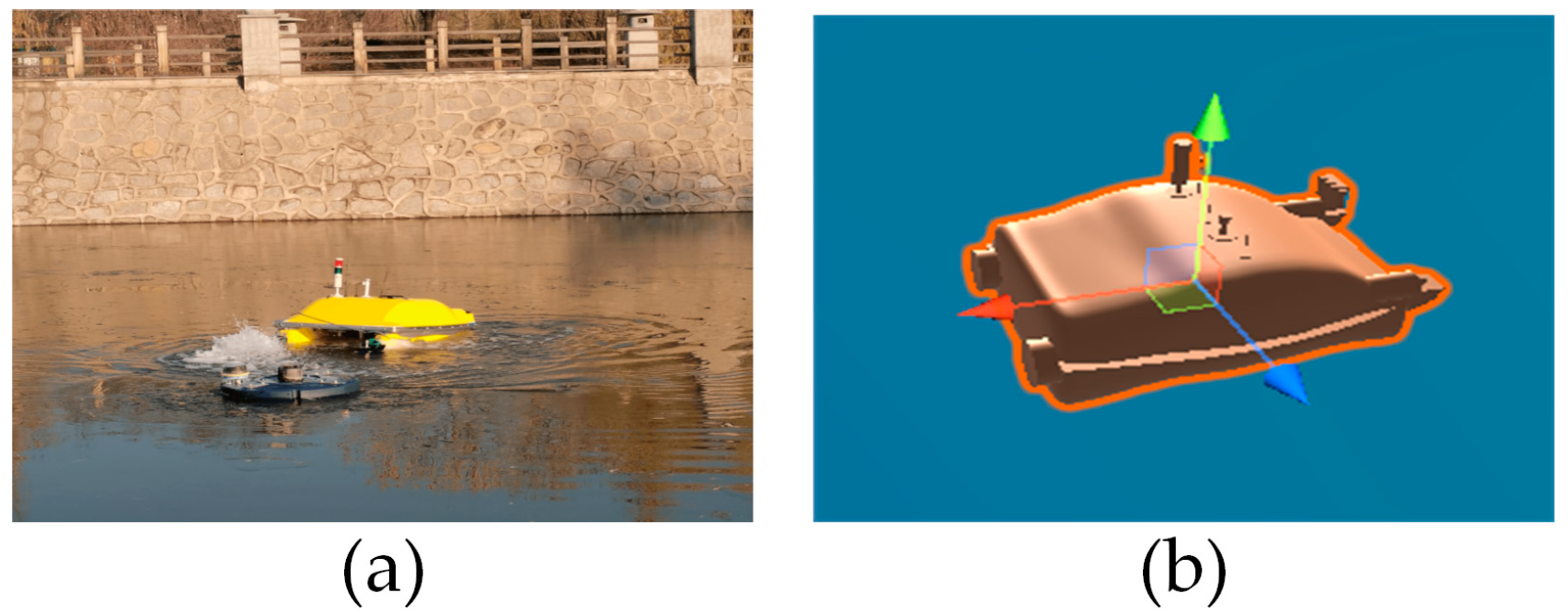
3.1. USV Modeling
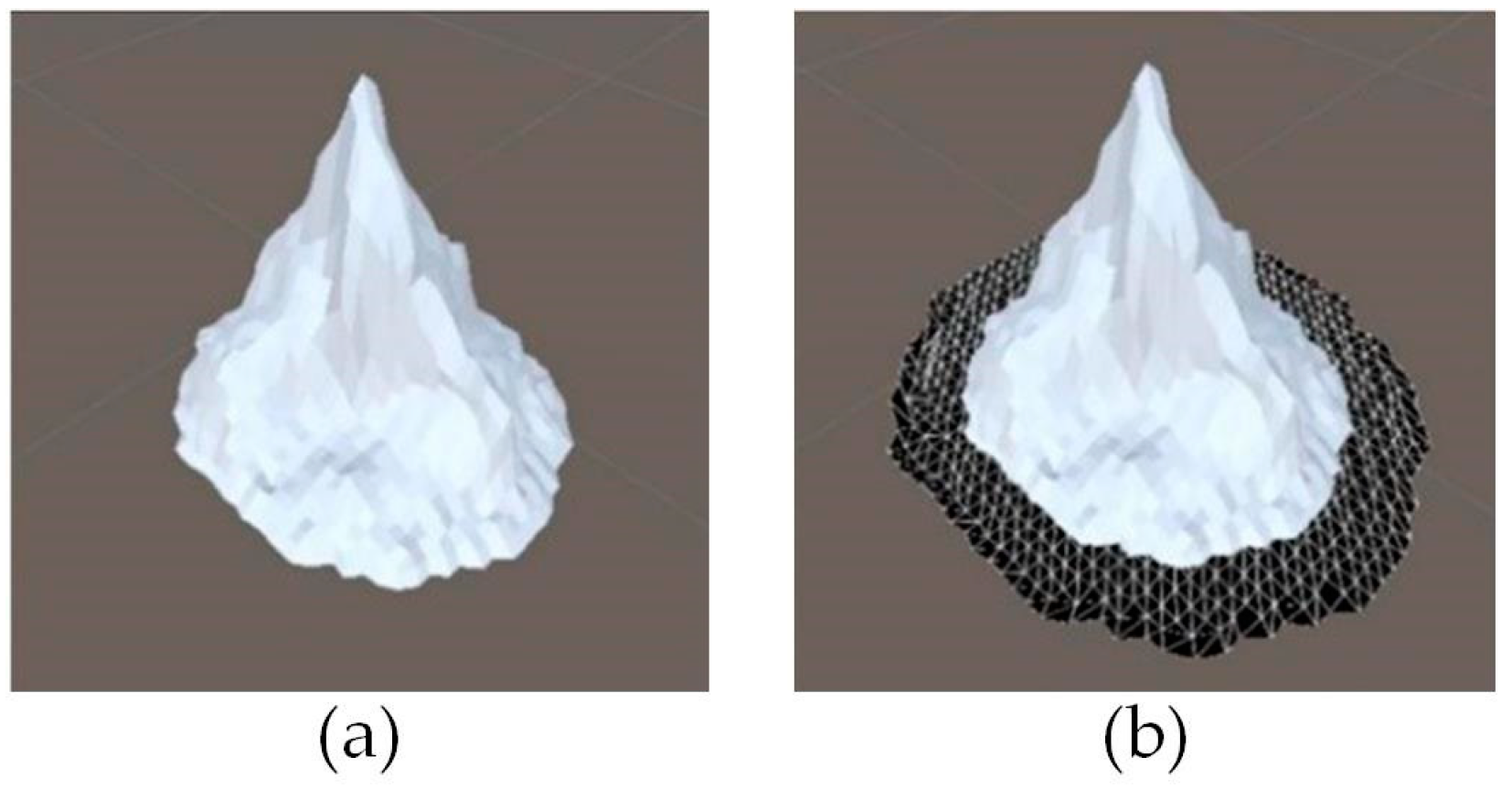
3.2. Obstacle Modeling
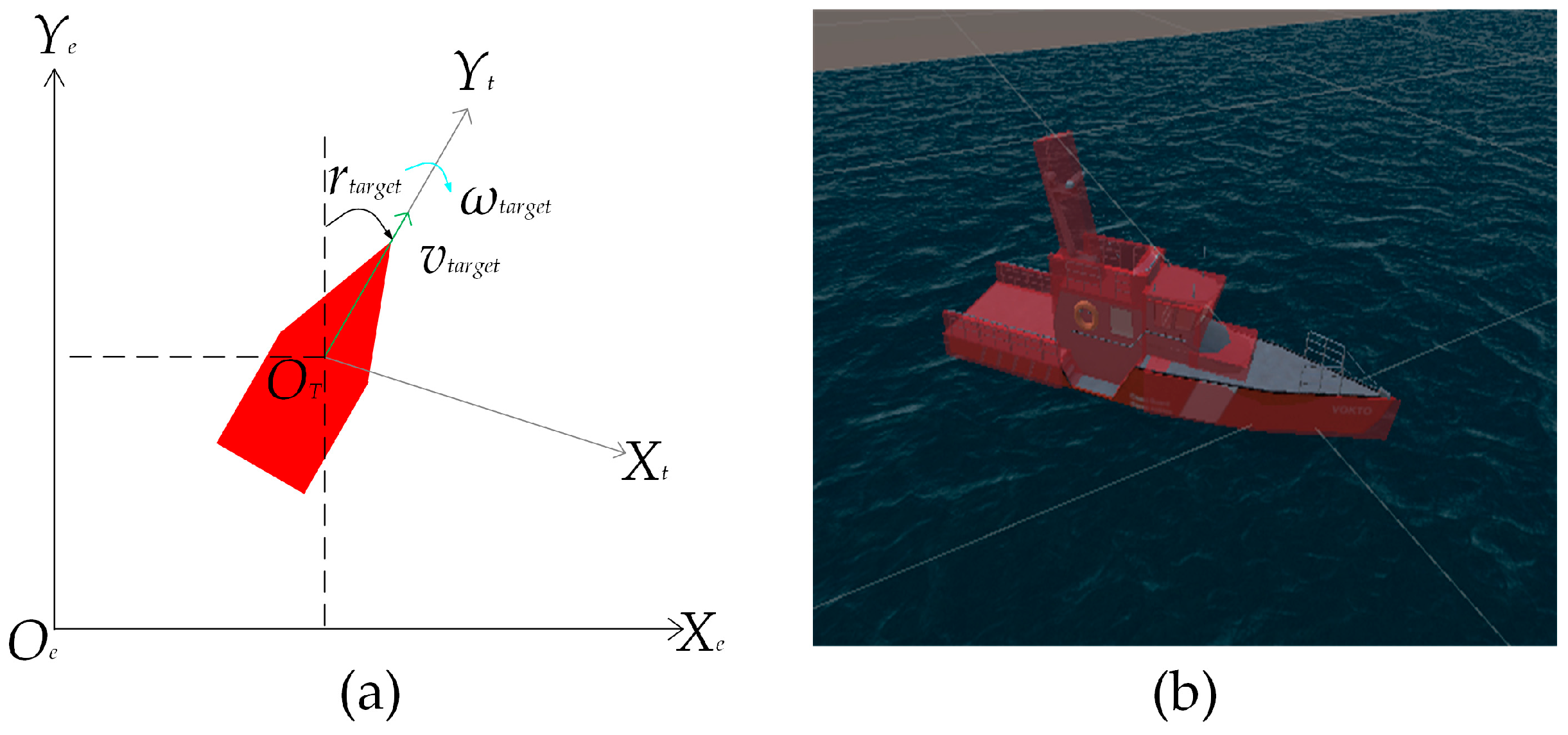
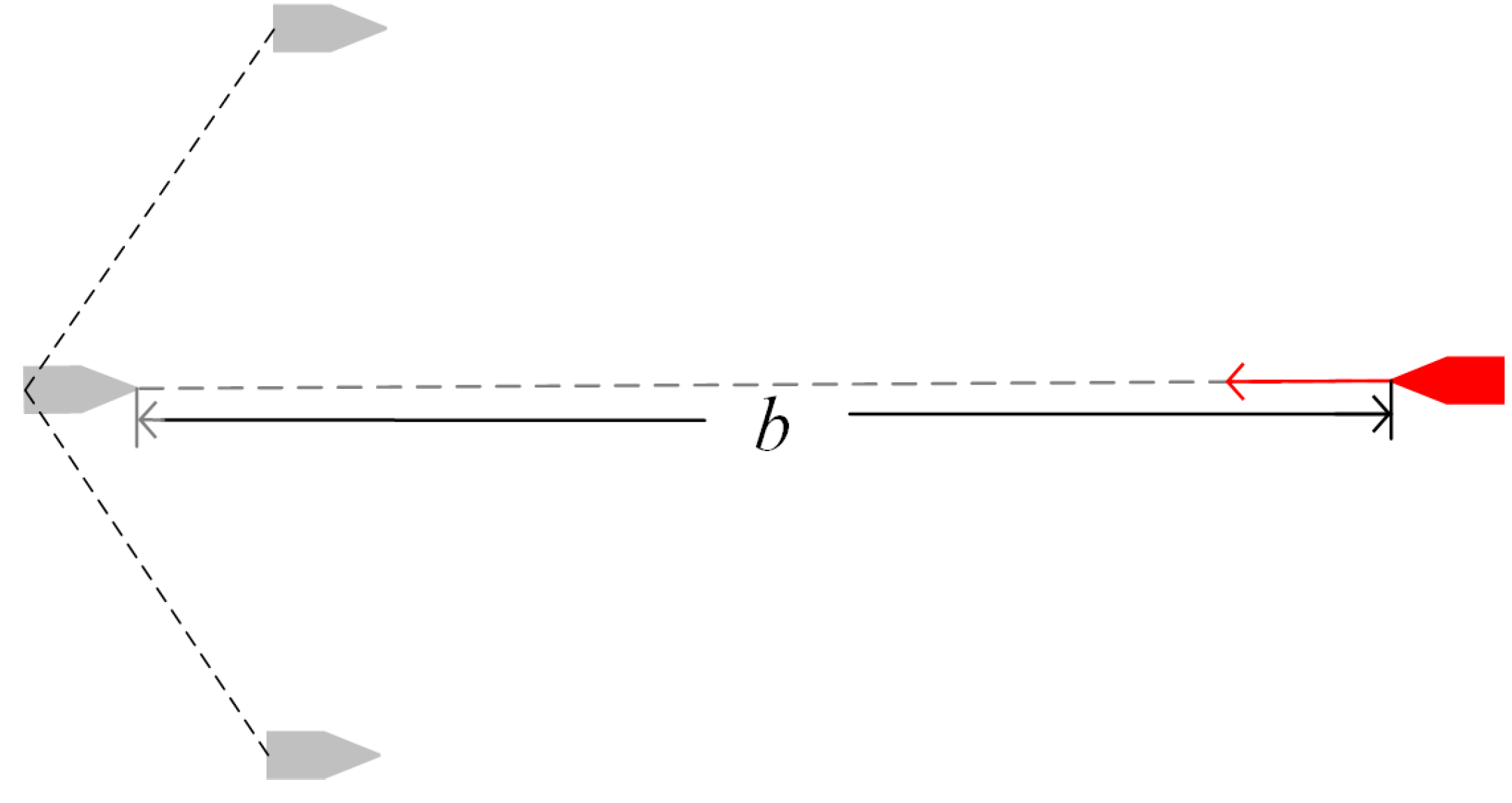
3.3. Target Modeling
4. Proposed Algorithm
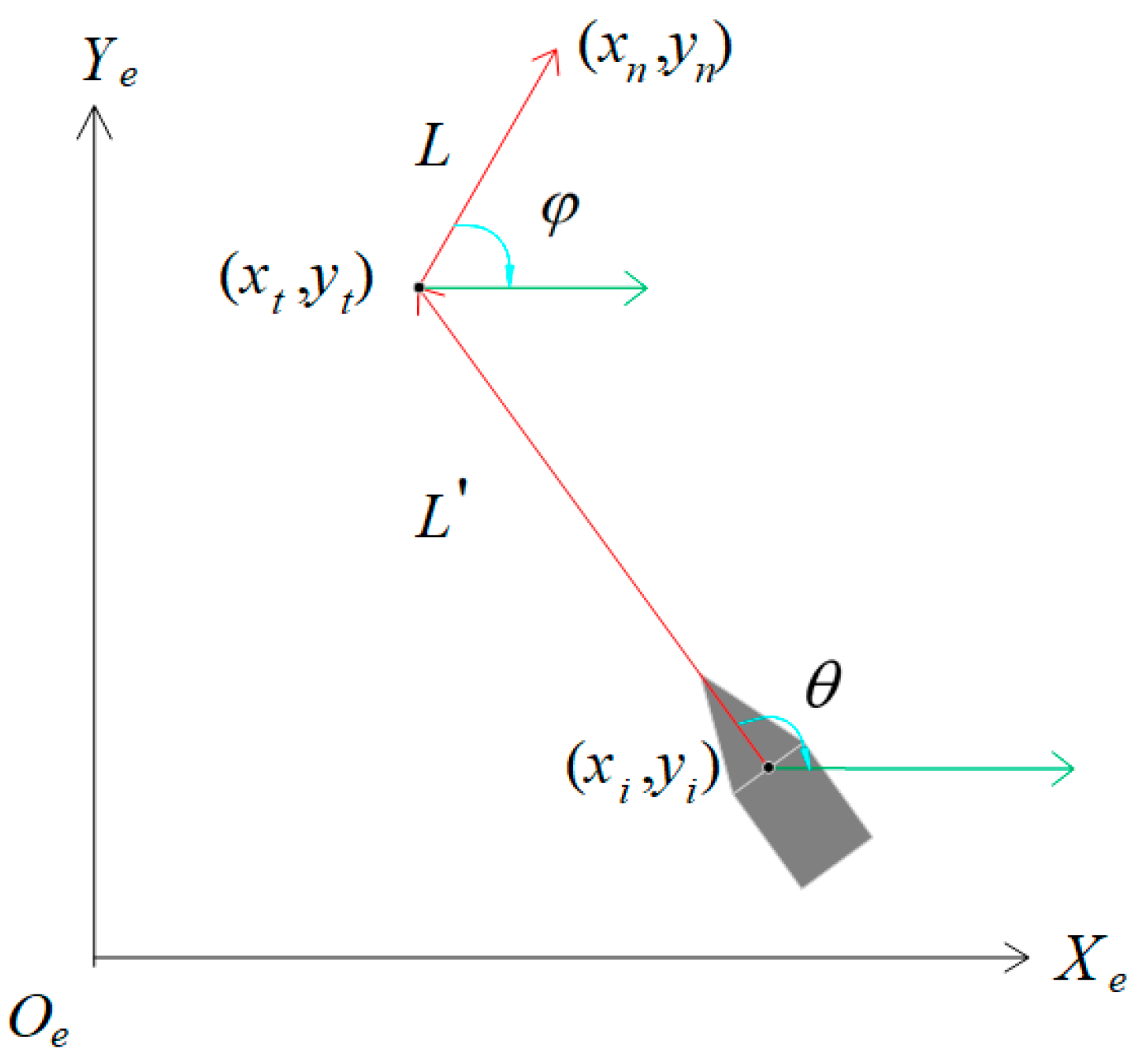
4.1. Improved A* Algorithm
| Algorithm 1: Smoothing method of path turning point | |
| Step1: | Initialize parameters; |
| Step2: | If L′ = Rs and kc > rmax/u |
| Step3: | If {(x, y) ||x − xt| < Rs, |y − yt| < Rs} ∩ O = Ø |
| Step4: | Obtain the path node 2 using (6); |
| Step5: | If {(x, y) ||x − xt + (L′ cos φ)/2| < Rs/2, |y − yt + (L′ sin φ)/2| < Rs/2|} ∩ O = Ø |
| Step6: | Set (xt,yt) as path node 2; |
| Step7: | Obtain the path node 3 using (7); |
| Step8: | Obtain the path node 4 using (8); |
| Step9: | Obtain the path node 5 using (8); |
| Step10: | If {(x, y) ||x − xt + (L cos φ)/2| < Rs/2, |y − yt + (L sin φ)/2| < Rs/2|} ∩ O = Ø |
| Step11: | Obtain the path node 2 using (9); |
| Step12: | Obtain the path node 3 using (9); |
| Step13: | Obtain the path node 4 using (7); |
| Step14: | Save all path node in P′; |
| Step15: | Complete the path of P′ using (11); |
| Step16: | If kc > rmax/u |
| Step17: | Repeat Step3–16; |
| Step18: | Else Replace P with P′; |
| Step19: | Else Replace P with P′. |
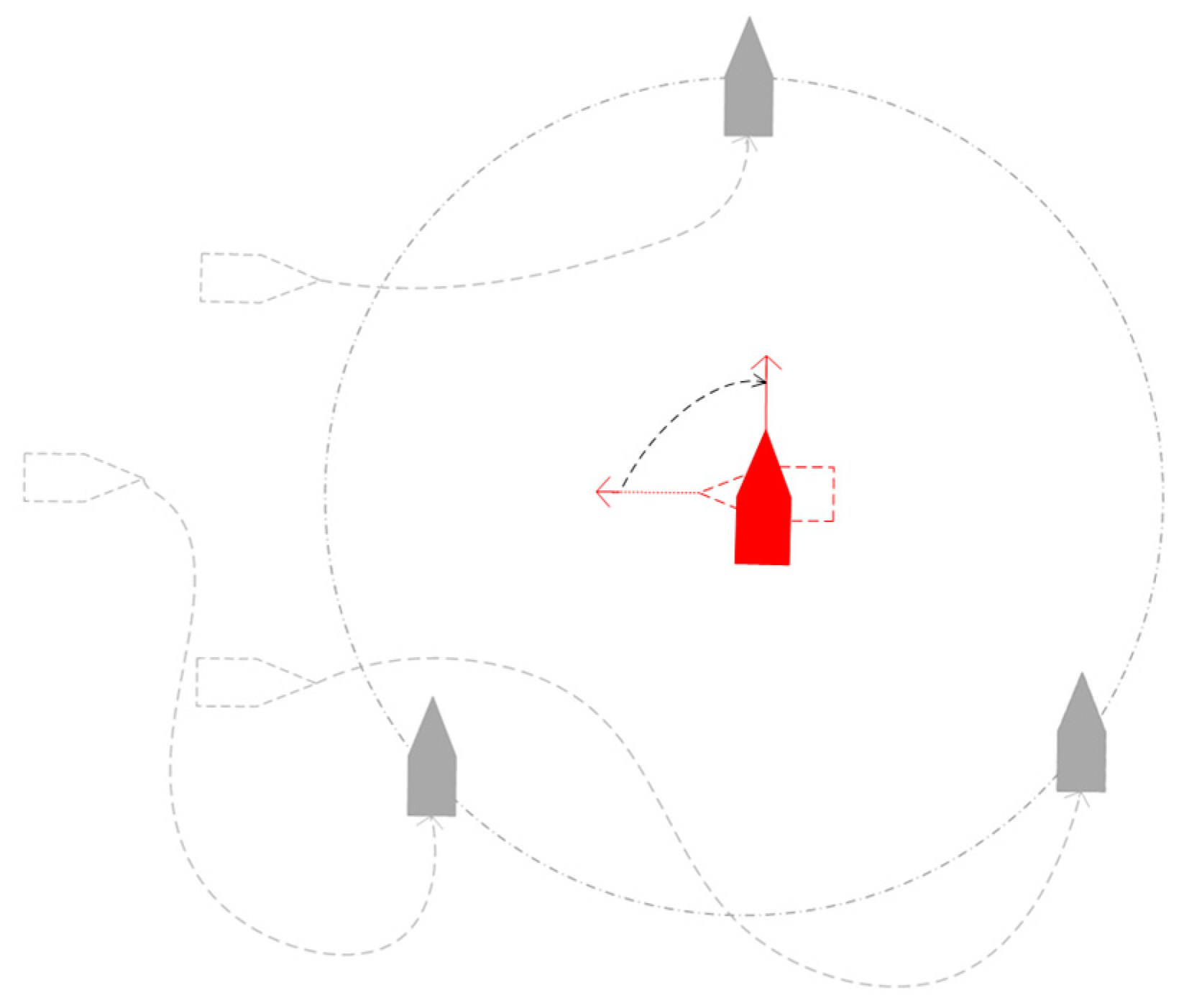
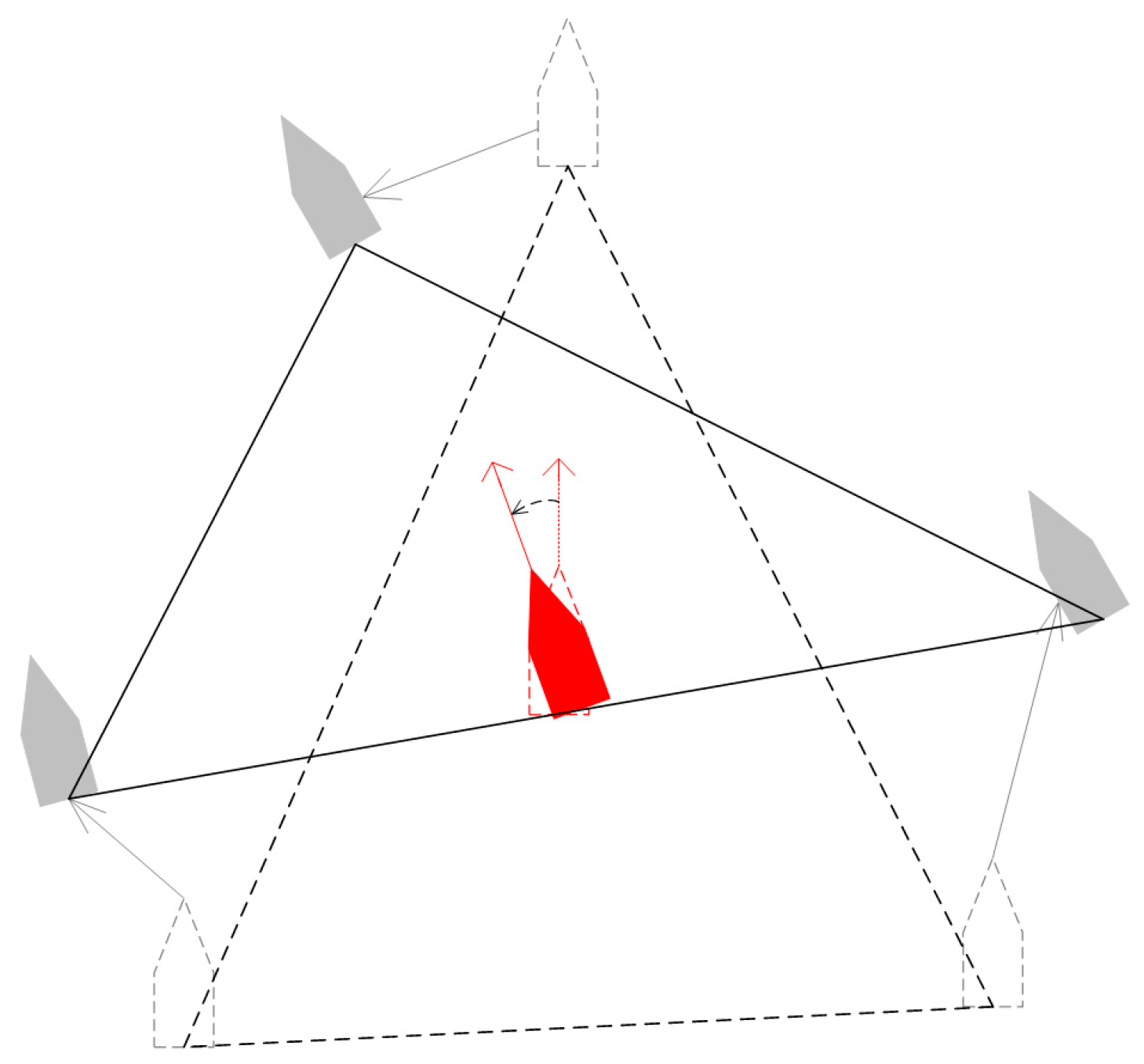
4.2. A Biomimetic Multi USV Swarm Collaborative Hunting Method
5. Simulation Experiment and Discussion
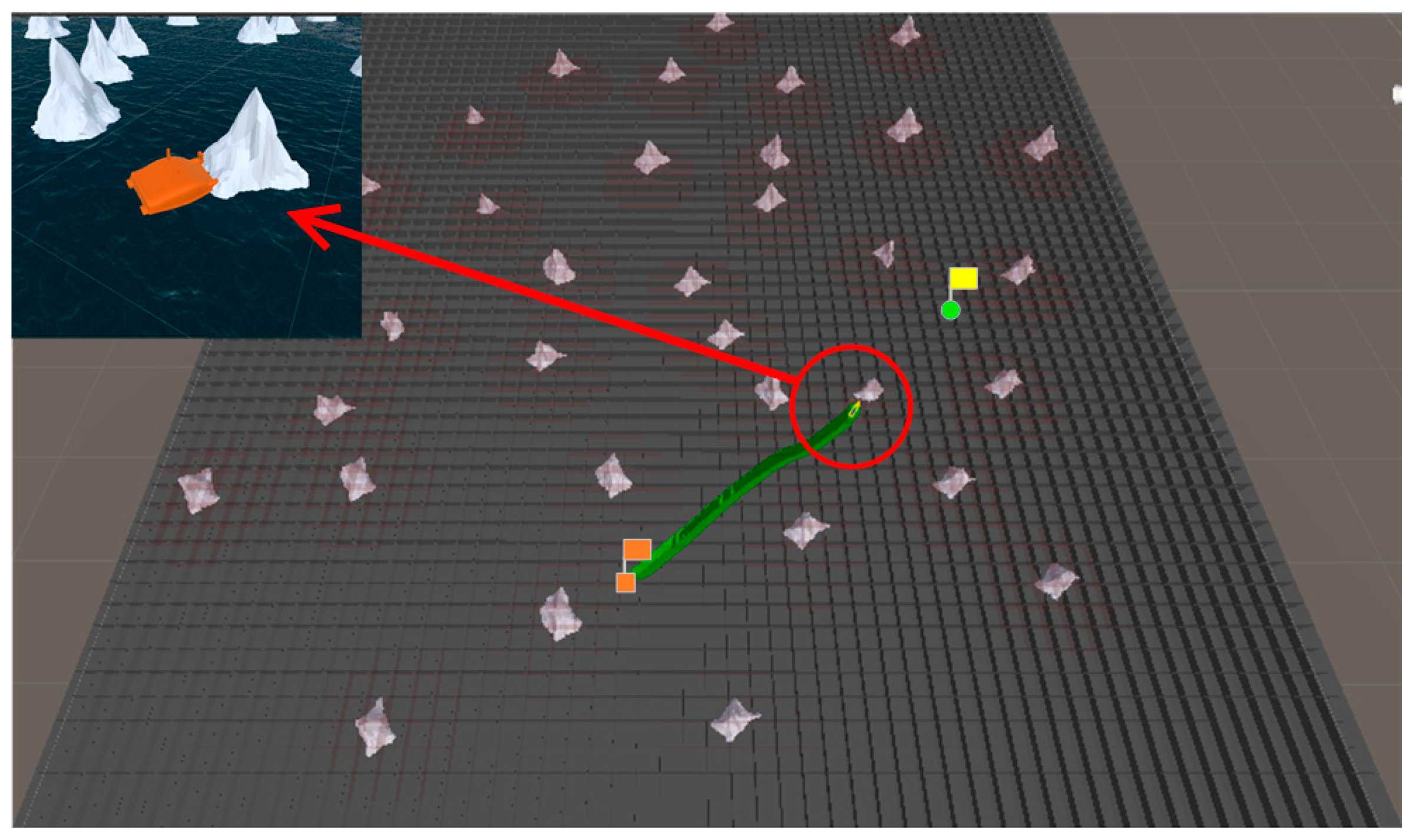
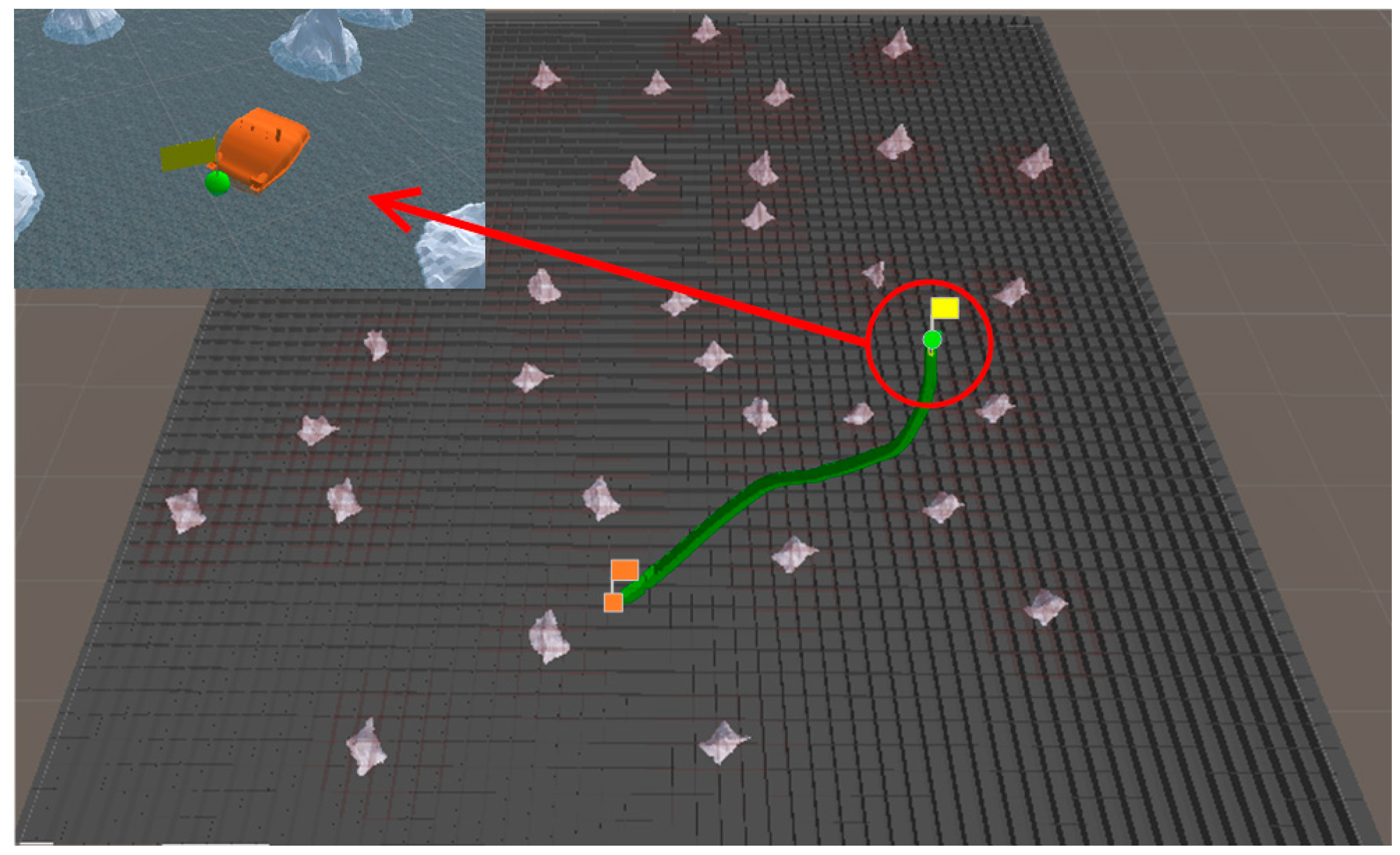
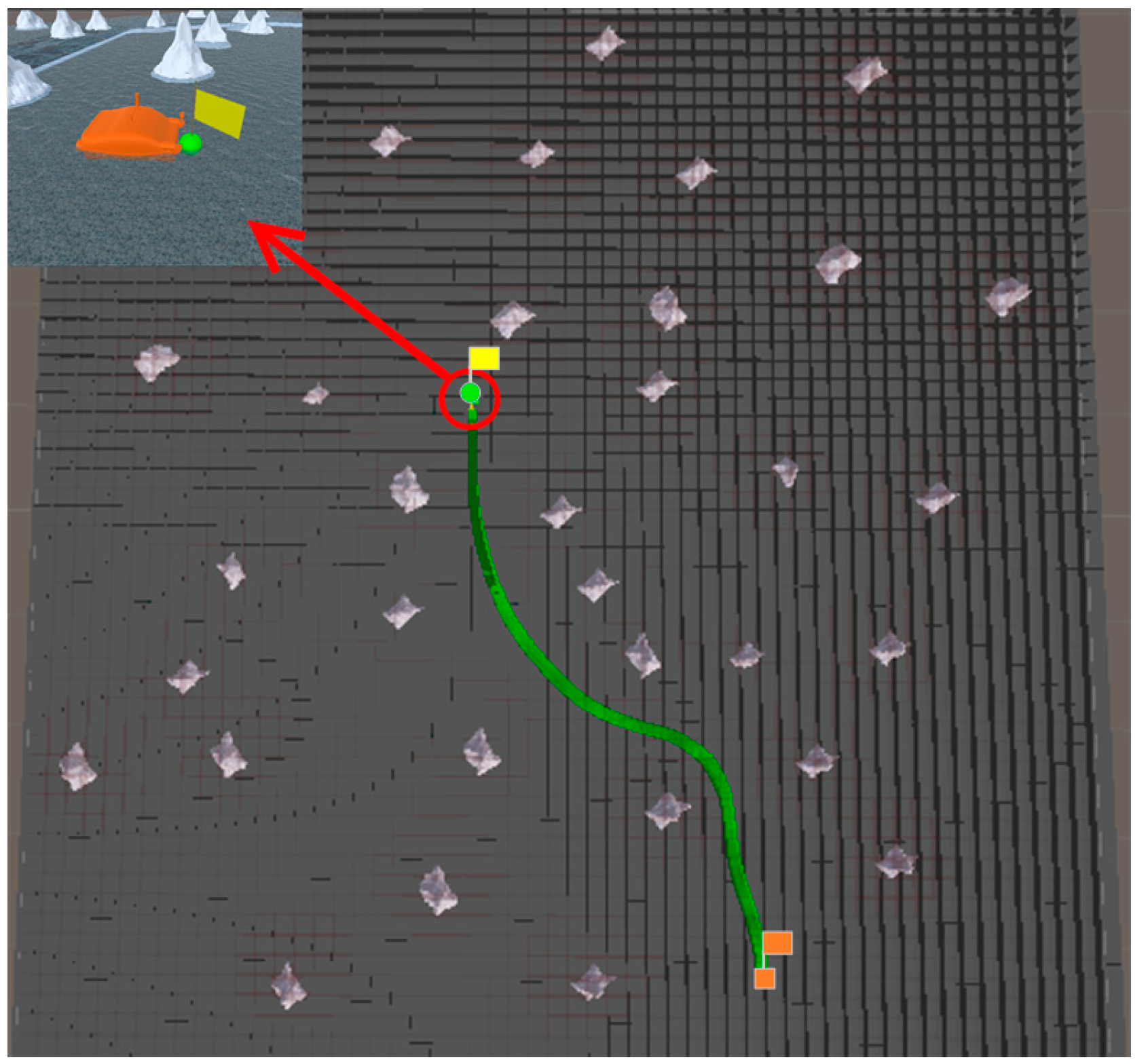
5.1. Simulation Experiment of Path Planning in Scene 1
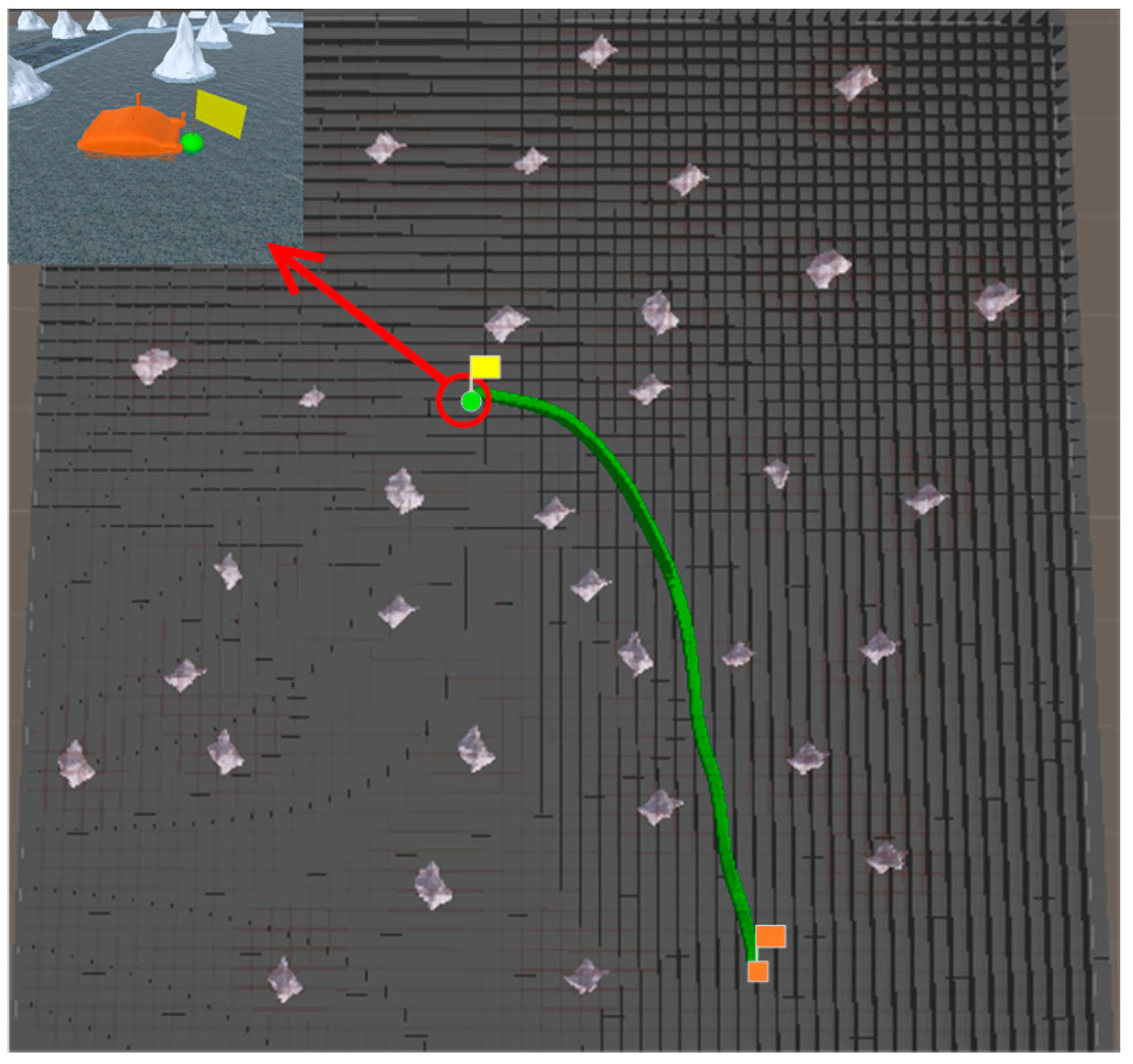
5.2. Simulation Experiment of Path Planning in Scene 2
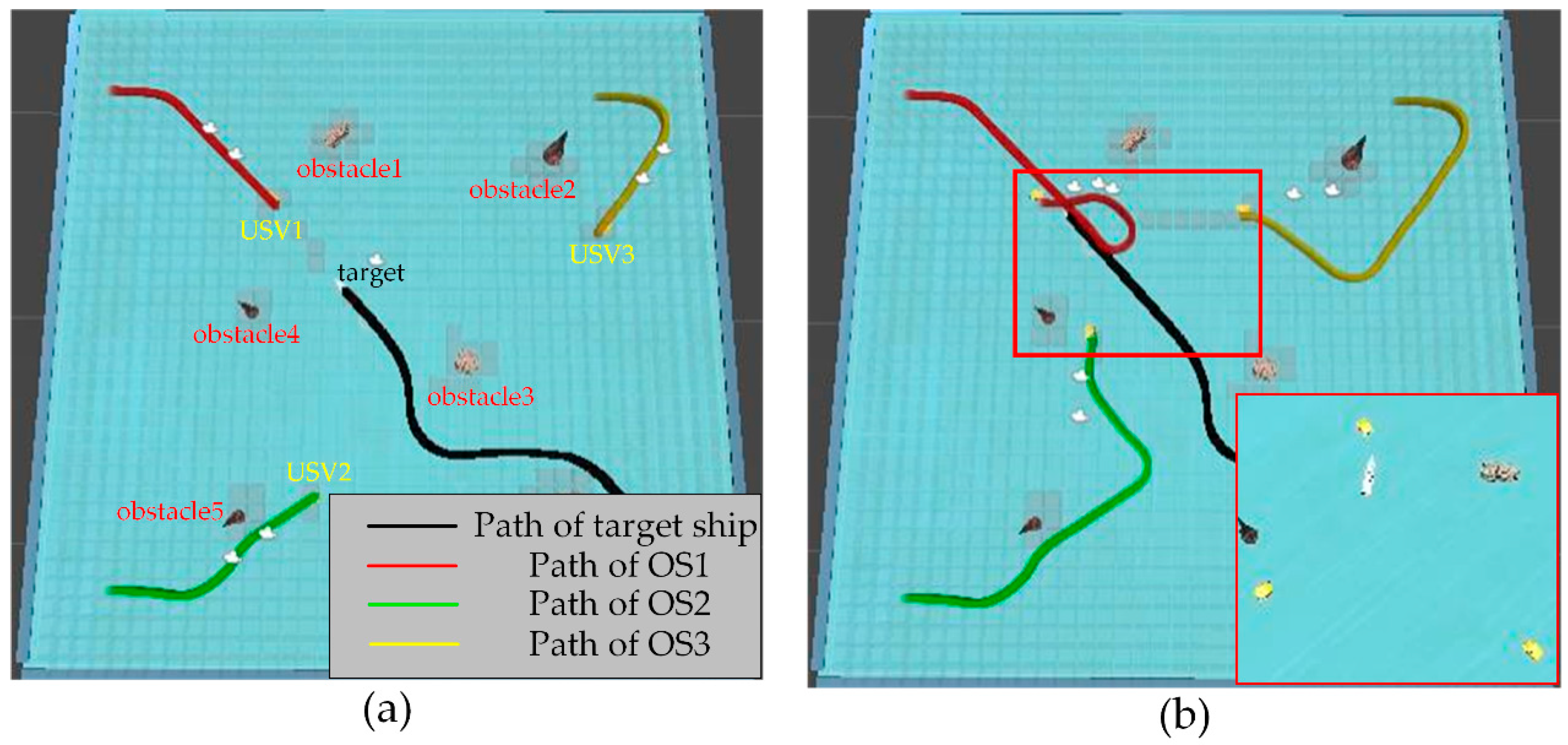
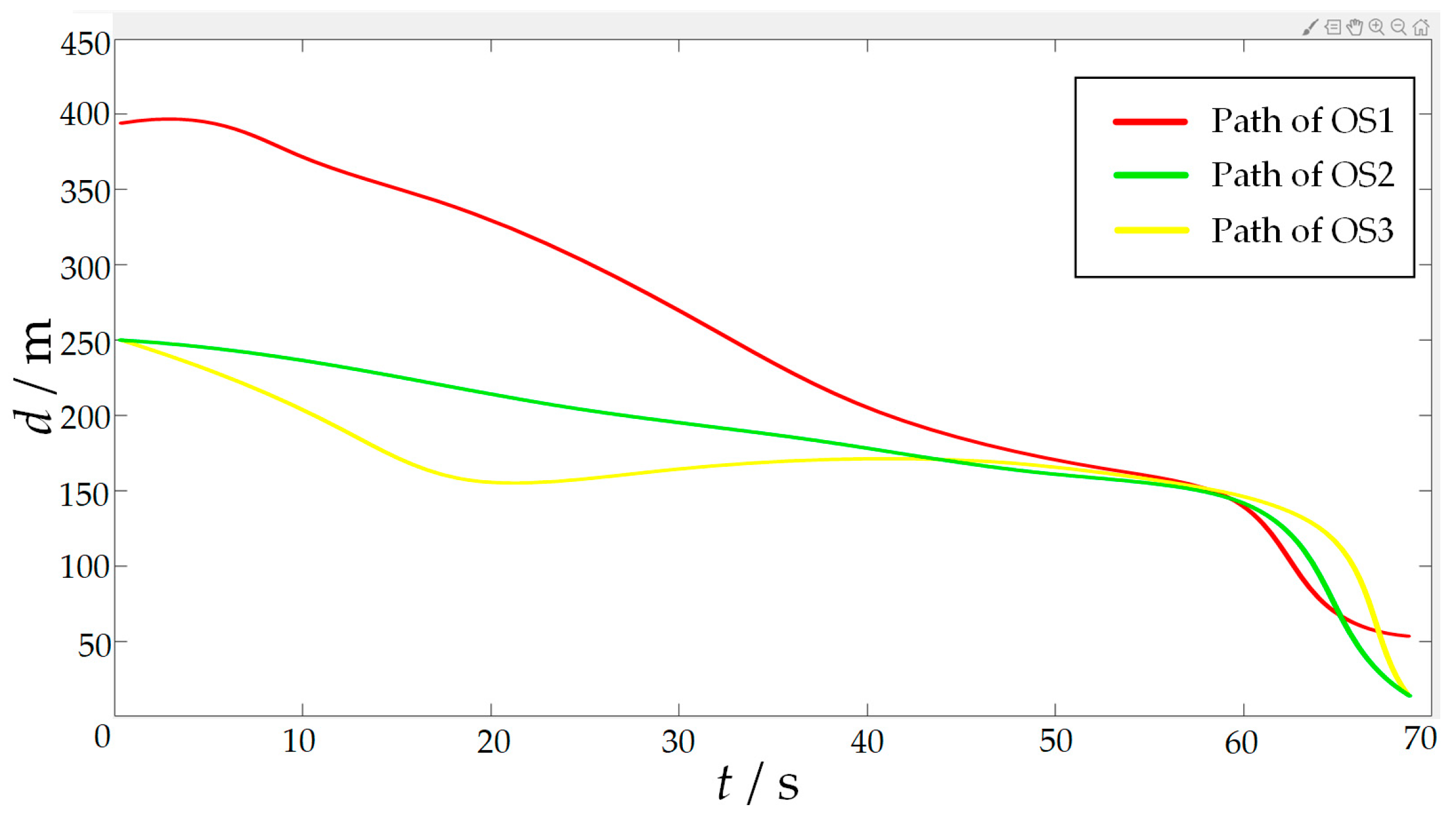
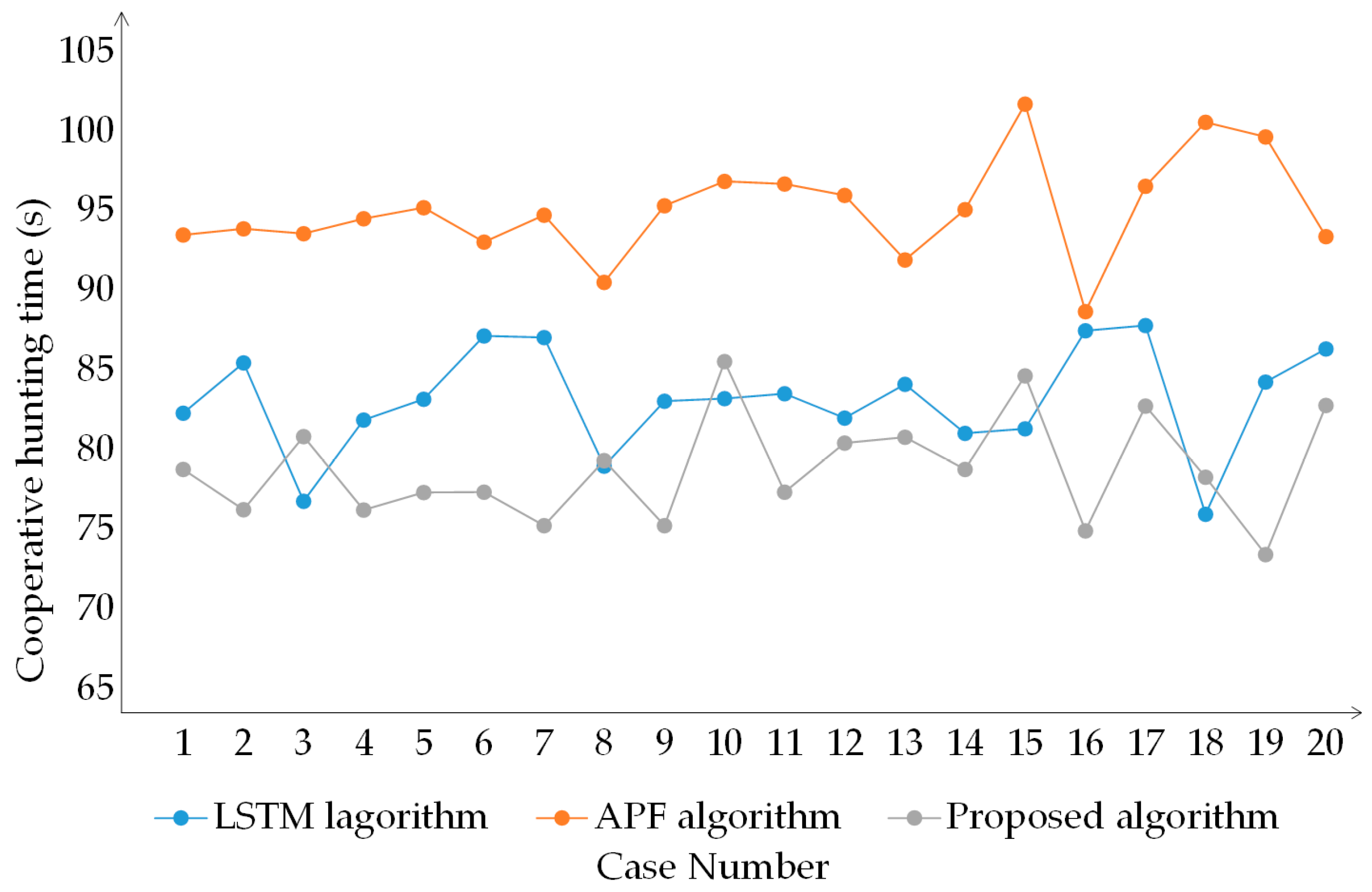
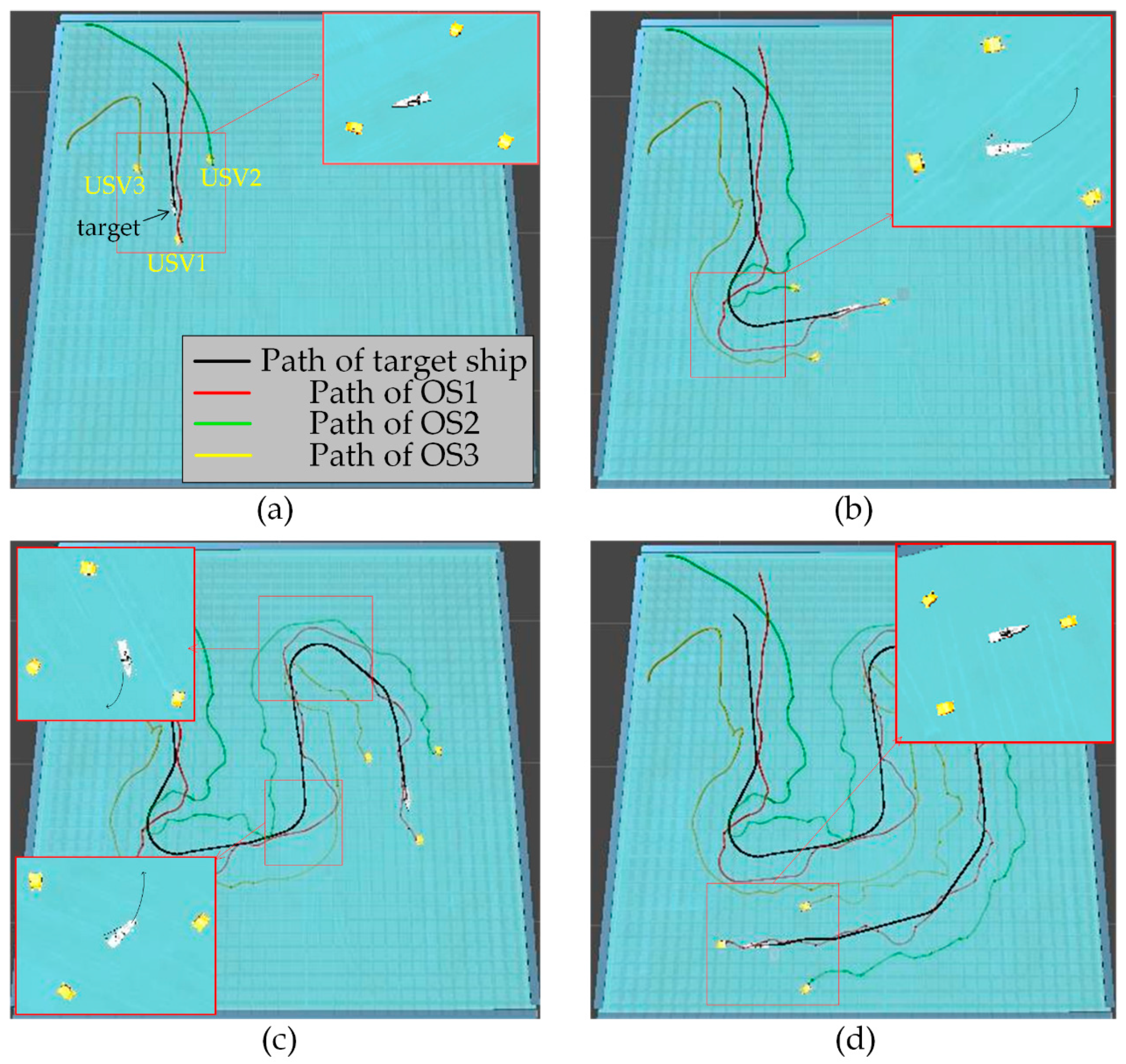
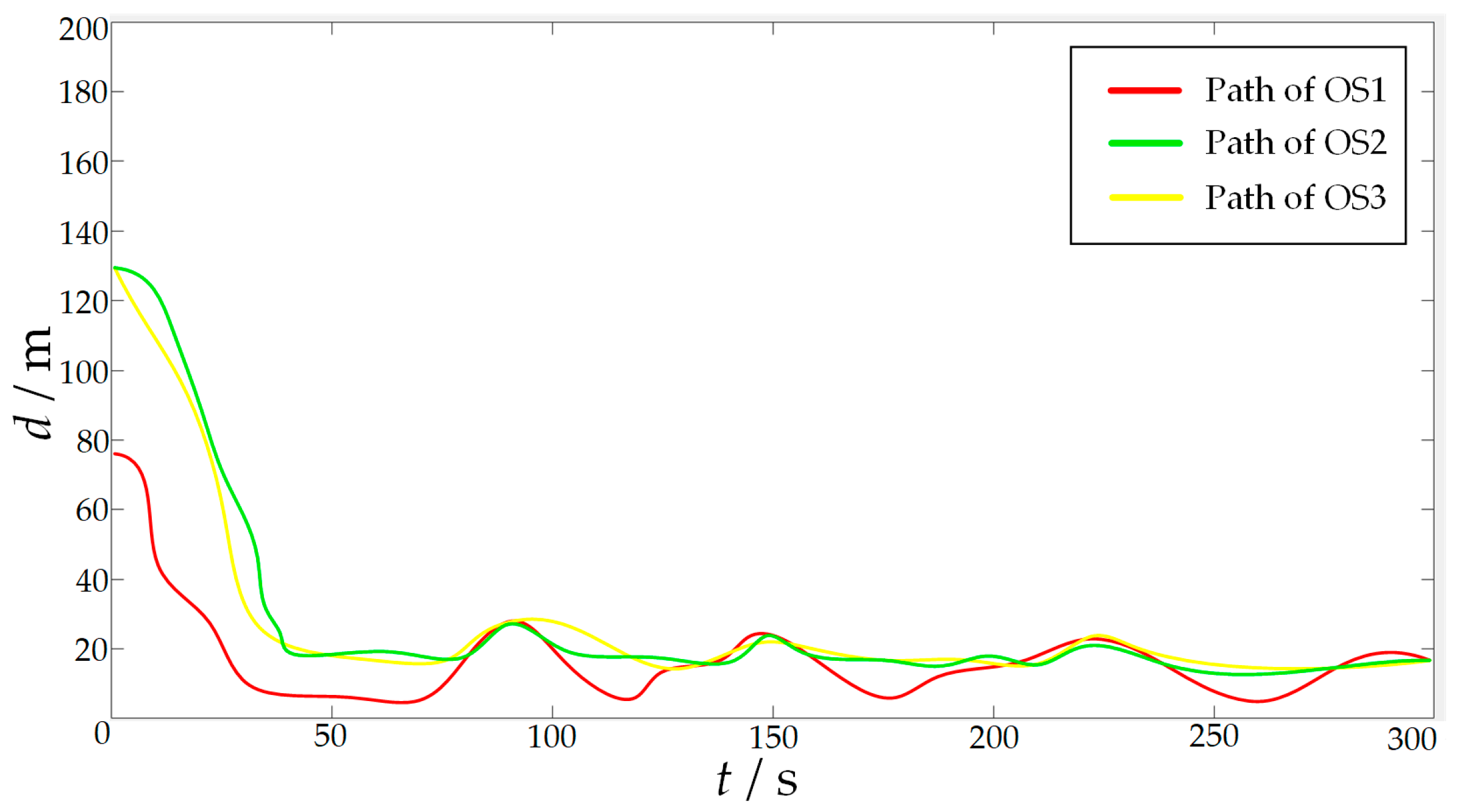
5.3. Simulation Experiment of Target Hunting
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, J.; Liu, G.; Xu, J.; Zhao, Z.; Chen, Z.; Yang, M.; Wang, X.; Bai, Y. A Hybrid Multi-Target Path Planning Algorithm for Unmanned Cruise Ship in an Unknown Obstacle Environment. Sensors 2022, 22, 2429. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Deng, W.; Zhao, Z.; Wang, X.; Xu, J.; Wang, L.; Sun, Q.; Shen, Z. A Hybrid Path Planning Method for an Unmanned Cruise Ship in Water Quality Sampling. IEEE Access 2019, 7, 87127–87140. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, J.; Zhao, Z.; Wang, X.; Chen, Y. A Path-Planning Method Considering Environmental Disturbance Based on VPF-RRT*. Drones 2023, 7, 145. [Google Scholar] [CrossRef]
- Zhu, Z.; Xiao, J.; Li, J.; Wang, F.; Zhang, Q. Global path planning of wheeled robots using multi-objective memetic algorithms. Integr. Comput. Aided Eng. 2015, 22, 387–404. [Google Scholar] [CrossRef]
- Altunbas, C.; Alexeev, T.; Miften, M. Effect of grid geometry on the transmission properties of 2D grids for flat detectors in CBCT. Phys. Med. Biol. 2019, 64, 225006. [Google Scholar] [CrossRef]
- Zhang, Q.; Song, X.; Yang, Y.; Haotian, M.; Ryosuke, S. Visual graph mining for graph matching. Comput. Vis. Image Underst. 2019, 178, 16–29. [Google Scholar] [CrossRef]
- Zhang, J.; Feng, Y.; Shi, F.; Wang, G.; Ma, B.; Li, R.; Jia, X. Vehicle routing in urban areas based on the oil consumption weight-Dijkstra algorithm. IET Intell. Transp. 2016, 10, 495–502. [Google Scholar] [CrossRef]
- Yershov, D.; Lavalle, S. Simplicial Dijkstra and A* Algorithms: From Graphs to Continuous Spaces. Adv. Robot. 2012, 26, 2065–2085. [Google Scholar] [CrossRef]
- Ni, J.; Wu, L.; Shi, P.; Yang, S. A dynamic bioinspired neural network based real-time path planning method for autonomous underwater vehicles. Comput. Intell. Neurosci. 2017, 2017, 9269742. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Gao, S.; Li, L.; Sun, B.; Cheng, S. Obstacle Avoidance Path Planning Design for Autonomous Driving Vehicles Based on an Improved Artificial Potential Field Algorithm. Energies 2019, 12, 2342. [Google Scholar] [CrossRef] [Green Version]
- Ye, B.; Tang, Q.; Yao, J. Collision-Free Path Planning and Delivery Sequence Optimization in Noncoplanar Radiation Therapy. IEEE Trans. Cybern. 2019, 49, 42–55. [Google Scholar] [CrossRef]
- Heon-Cheol, L.; Touahmi, Y.; Beom-Hee, L. Grafting: A Path Replanning Technique for RaPIly-Exploring Random Trees in Dynamic Environments. Adv. Robot. 2012, 26, 2145–2168. [Google Scholar]
- Wanna, P.; Wongthanavasu, S. An Improved Cellular Automata-Based Classifier with Soft Decision. J. Internet Technol. 2020, 21, 1701–1715. [Google Scholar] [CrossRef]
- Zeng, M.; Xi, L.; Xiao, A. The free step length ant colony algorithm in mobile robot path planning. Adv. Robot. 2016, 30, 1509–1514. [Google Scholar] [CrossRef]
- Thi-Thoa, M.; Cosmin, C.; Duc-Trung, T.; Robin, D. A Hierarchical Global Path Planning Approach for Mobile Robots Based on Multi-Objective Particle Swarm Optimization. Appl. Soft Comput. 2017, 59, 68–76. [Google Scholar] [CrossRef]
- Jiang, Z.; Jun, W.; Xiao, S. Autonomous land vehicle path planning algorithm based on improved heuristic function of A-Star. Int. J. Adv. Robot. Syst. 2021, 18, 1–10. [Google Scholar] [CrossRef]
- Yu, J.; Hou, J.; Chen, G. Improved Safety-First A-Star Algorithm for Autonomous Vehicles. In Proceedings of the 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), Shenzhen, China, 18–21 December 2020. [Google Scholar]
- Lin, Z.; Zhang, Y.; Li, Y. Mobile Robot Path Planning Based on Improved Localized Particle Swarm Optimization. IEEE Sens. J. 2021, 21, 6962–6972. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, H.; Lu, Z.; Zheng, Q. A Dynamic Fusion Pathfinding Algorithm Using Delaunay Triangulation and Improved A-star for Mobile Robots. IEEE Access 2021, 9, 20602–20621. [Google Scholar] [CrossRef]
- Hong, Z.; Sun, P.; Tong, X.; Pan, H.; Zhou, R.; Zhang, Y.; Han, Y.; Wang, J.; Yang, S.; Xu, L. Improved A-Star Algorithm for Long-Distance Off-Road Path Planning Using Terrain Data Map. ISPRS Int. J. Geo-Inf. 2021, 10, 785. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, J.; Dai, J.; He, C. Optimal path planning with modified A-Star algorithm for stealth unmanned aerial vehicles in 3D network radar environment. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 236, 72–81. [Google Scholar] [CrossRef]
- Zhao, Z.; Hu, Q.; Feng, H.; Feng, X.; Su, W. A Cooperative Hunting Method for Multi-AUV Swarm in Underwater Weak Information Environment with Obstacles. J. Mar. Sci. Eng. 2022, 10, 1266. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, X.; Bai, G.; Sha, Y.; Liu, J. Multi-autonomous underwater vehicle formation control and cluster search using a fusion control strategy at complex underwater environment. Ocean Eng. 2020, 216, 108048. [Google Scholar] [CrossRef]
- Wang, Y.; Dong, L.; Sun, C. Cooperative Control for Multi-Player Pursuit-Evasion Games with Reinforcement Learning. Neurocomputing 2020, 412, 101–114. [Google Scholar] [CrossRef]
- Cai, L.; Sun, Q. Multiautonomous underwater vehicle consistent collaborative hunting method based on generative adversarial network. Int. J. Adv. Robot. Syst. 2020, 17, 663–678. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2019, 149, 270–299. [Google Scholar] [CrossRef]
- Wang, Q.; Li, J.; Yang, L.; Yang, Z.; Li, P.; Xia, G. Distributed Multi-Mobile Robot Path Planning and Obstacle Avoidance Based on ACO–DWA in Unknown Complex Terrain. Electronics 2022, 11, 2144. [Google Scholar] [CrossRef]
- Guo, J.; Qi, J.; Wang, M.; Wu, C.; Xu, S. A cooperative search and encirclement algorithm for quadrotors in unknown areas. J. Beijing Univ. Aeronaut. Astronaut. 2022. [Google Scholar] [CrossRef]
- Souza, C.; Newbury, R.; Cosgun, A.; Castillo, P.; Vidolov, B.; Kulic, D. Decentralized Multi-Agent Pursuit Using Deep Reinforcement Learning. IEEE Robot. Autom. Lett. 2021, 6, 4552–4559. [Google Scholar] [CrossRef]
- Sun, Z.; Sun, H.; Li, P.; Zou, J. Self-Organizing Cooperative Pursuit Strategy for Multi-USV with Dynamic Obstacle Ships. J. Mar. Sci. Eng. 2022, 10, 562. [Google Scholar] [CrossRef]
- Lv, J.; Xu, X.; Du, S.; Ma, Q. Research on the Method of Capturing Task Allocation Based on Energy Balance. In Proceedings of the 2nd International Conference on Artificial Intelligence, Network and Information Technology, Shanghai, China, 14–15 October 2021. [Google Scholar]
- Ammar, A.; Bennaceur, H.; Chari, I.; Koubâa, A.; Alajlan, M. Relaxed Dijkstra and A* with linear complexity for robot path planning problems in large-scale grid environments. Soft Comput. 2016, 20, 4149–4171. [Google Scholar] [CrossRef]
- Liu, L.; Han, G.; Xu, Z.; Jiang, J.; Martinez-Garcia, M. Boundary Tracking of Continuous Objects Based on Binary Tree Structured SVM for Industrial Wireless Sensor Networks. IEEE Trans Mob. Comput. 2020, 21, 849–861. [Google Scholar] [CrossRef]
- Yu, J.; Chen, Z.; Zhao, Z.; Yao, P.; Xu, J. A traversal multi-target path planning method for multi-unmanned surface vessels in space-varying ocean current. Ocean. Eng. 2023, 278, 114423. [Google Scholar] [CrossRef]
- Xie, Y.; Liang, X.; Lou, L.; Guo, X. Self-organization Method of USV Swarm Target Strike Task Based on Ant Colony Algorithm. In Proceedings of the International Symposium on Autonomous Systems Systems Engineering Research Institute, CSSC, Beijing, China, 29–31 May 2019. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Definition | Numerical Value |
|---|---|---|
| u (m/s) | Forward speed of USV | 15 |
| vgoal (m/s) | Forward speed of target | 10 |
| r (rad/s) | Angular velocity of USV | 1 |
| ωgoal (rad/s) | Angular velocity of target | 0.7 |
| E | Obstacle expansion coefficient | 1.5 |
| a | Width factor | 20 |
| b | Distance factor | 190 |
| R (m) | Minimum turning radius of USV | 3 |
| Rs (m) | Safety range of USV | 6 |
| Algorithm Name | Planning Time (s) | Path Length (m) |
|---|---|---|
| A* algorithm combined with B-spline curve | 0.90211 | 701.87774 |
| Proposed Algorithm | 0.66402 | 678.60917 |
| Start | End | Algorithm | Planning Time (s) | Path Length (m) | Total Turning Angle |
|---|---|---|---|---|---|
| (181, −419) | (−84, 103) | A* algorithm combined with B-spline curve | 0.90211 | 701.87774 | 161°1548′ |
| Proposed Algorithm | 0.66402 | 678.60917 | 87°0683′ | ||
| (−94, −27) | (347, −451) | A* algorithm combined with B-spline curve | 0.97951 | 725.15104 | 45°1268′ |
| Proposed Algorithm | 0.61845 | 709.13587 | 44°1534′ | ||
| (400, 400) | (−400, −400) | A* algorithm combined with B-spline curve | 1.24851 | 1634.9875 | 109°8418′ |
| Proposed Algorithm | 0.75112 | 1568.27831 | 105°7518′ | ||
| (400, −400) | (−400, 400) | A* algorithm combined with B-spline curve | 1.190011 | 1612.83788 | 141°4894′ |
| Proposed Algorithm | 0.74848 | 1567.15489 | 134°4537′ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Zhao, Z.; Xu, J.; Wang, X.; Lu, Y.; Yu, J. A Cooperative Hunting Method for Multi-USV Based on the A* Algorithm in an Environment with Obstacles. Sensors 2023, 23, 7058. https://doi.org/10.3390/s23167058
Chen Z, Zhao Z, Xu J, Wang X, Lu Y, Yu J. A Cooperative Hunting Method for Multi-USV Based on the A* Algorithm in an Environment with Obstacles. Sensors. 2023; 23(16):7058. https://doi.org/10.3390/s23167058
Chicago/Turabian StyleChen, Zhihao, Zhiyao Zhao, Jiping Xu, Xiaoyi Wang, Yang Lu, and Jiabin Yu. 2023. "A Cooperative Hunting Method for Multi-USV Based on the A* Algorithm in an Environment with Obstacles" Sensors 23, no. 16: 7058. https://doi.org/10.3390/s23167058
APA StyleChen, Z., Zhao, Z., Xu, J., Wang, X., Lu, Y., & Yu, J. (2023). A Cooperative Hunting Method for Multi-USV Based on the A* Algorithm in an Environment with Obstacles. Sensors, 23(16), 7058. https://doi.org/10.3390/s23167058