
Design of A Finite-Time Adaptive Controller for Image-Based Uncalibrated Visual Servo Systems with Uncertainties in Robot and Camera Models

Abstract
:1. Introduction
2. Kinematic Analysis of an Image-Based, Uncalibrated Visual Servo System
2.1. Differential Kinematics of the Visual Servo in an ETH Configuration
2.2. Differential Kinematics of the Visual Servo in EIH Configuration
3. Control Model of a Manipulator Based on Dynamics
4. Design and Stability Analysis of a Finite Time Tracking Controller
4.1. Proof of Global Asymptotic Stability of Closed-Loop Systems
4.2. Proof of Local Finite-Time Stabilization of Closed-Loop Systems
- (1)
- The lower bound of exists.
- (2)
- is negative and semi-definite.
- (3)
- is uniformly continuous for time
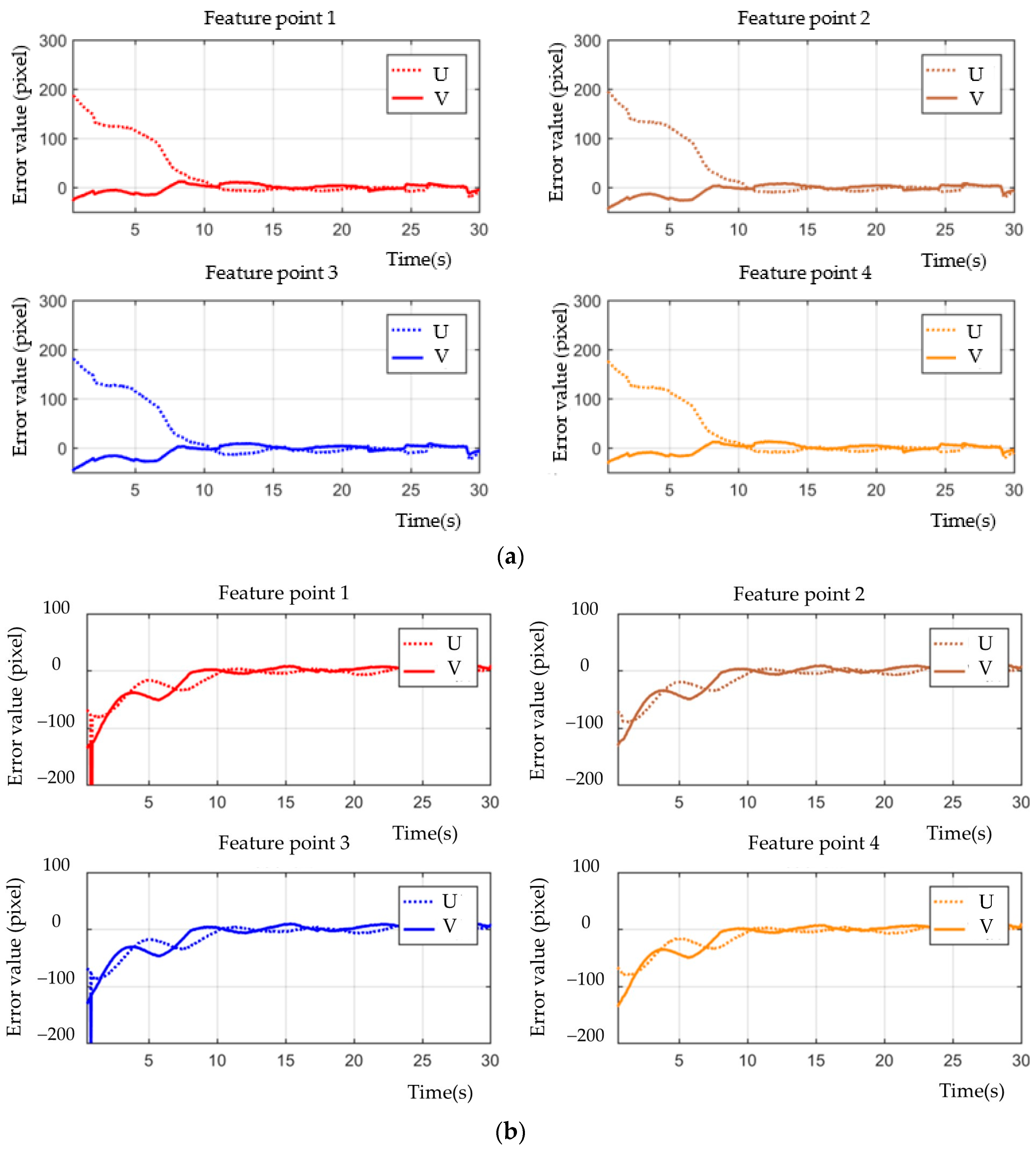
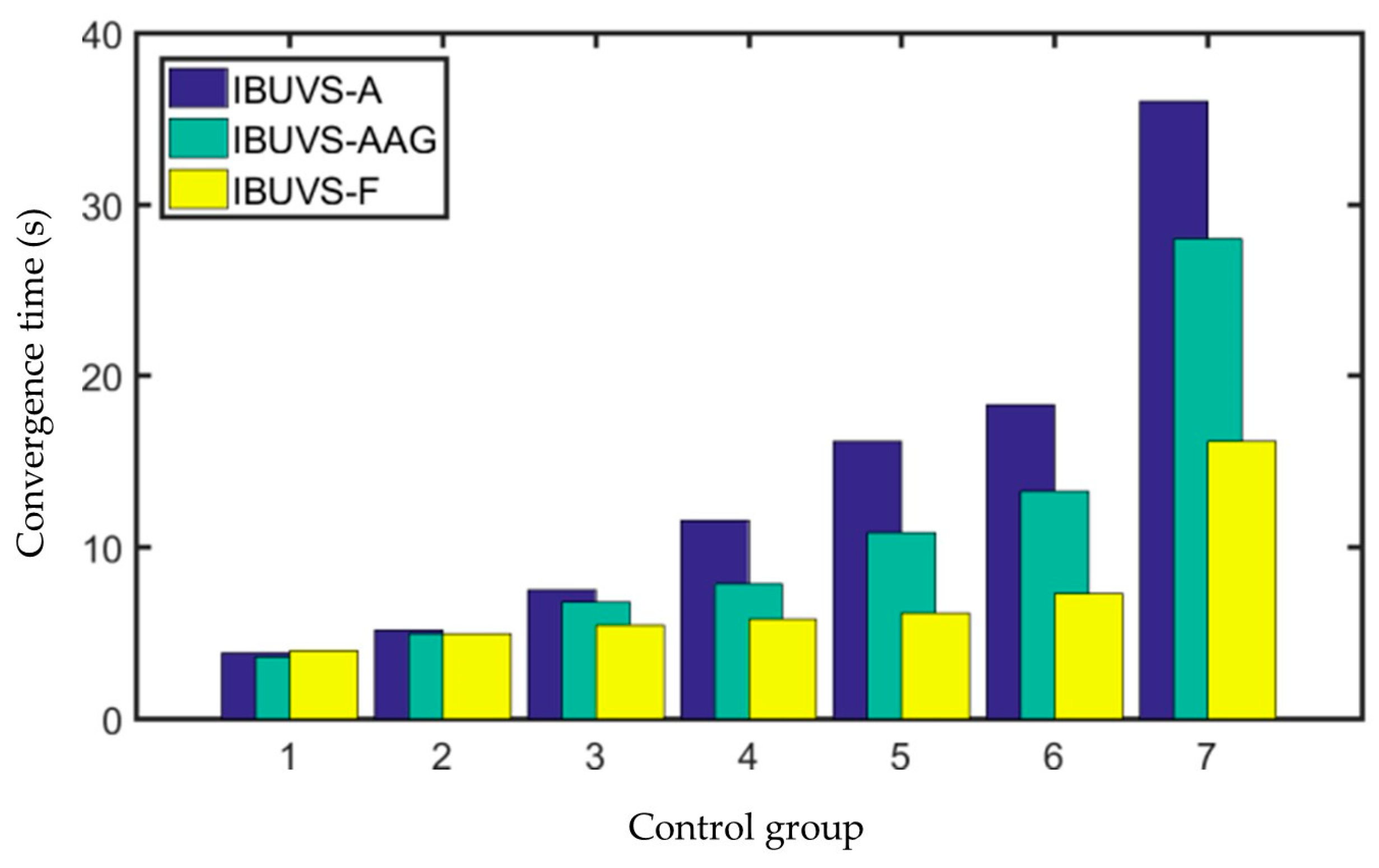
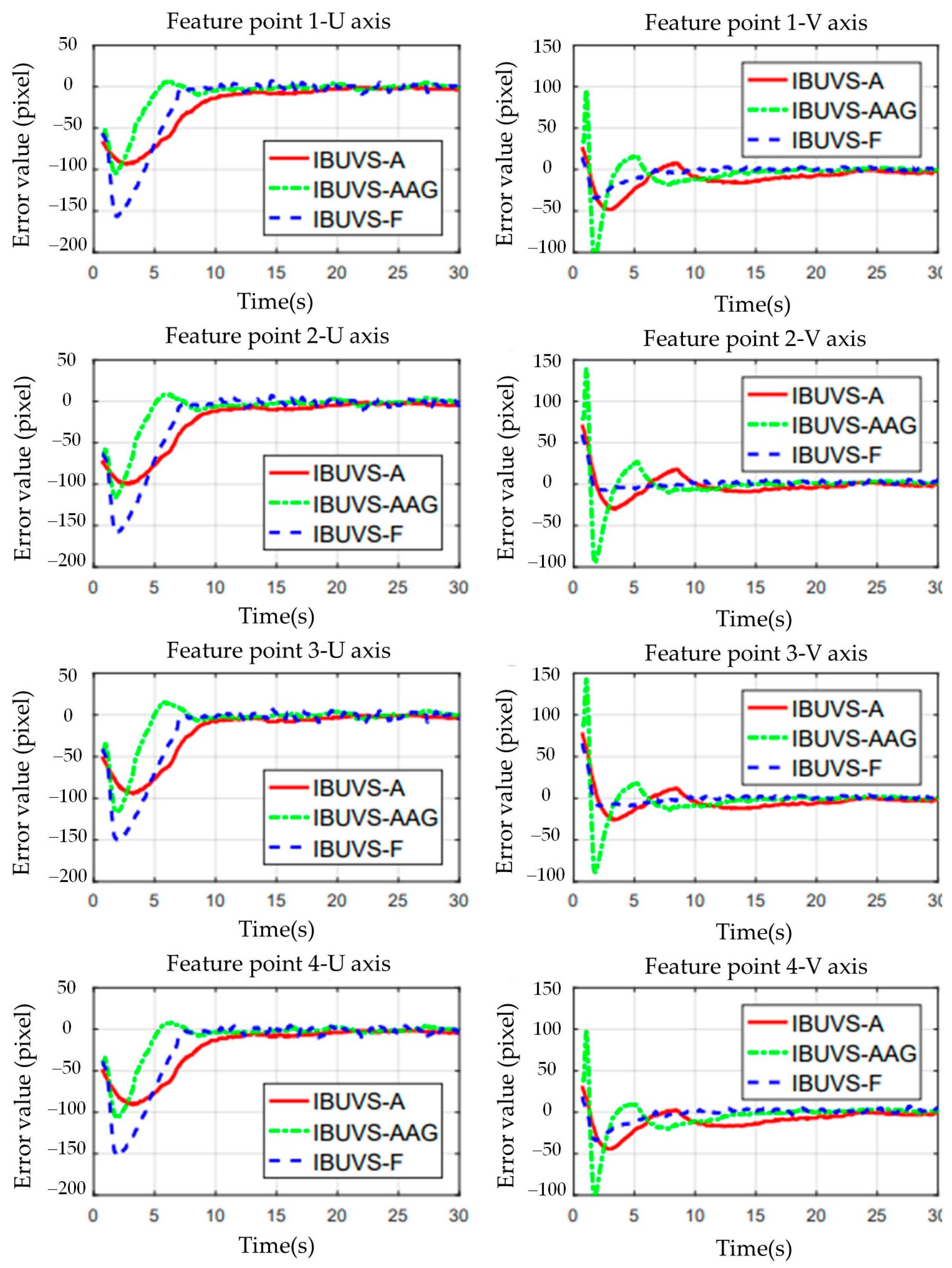
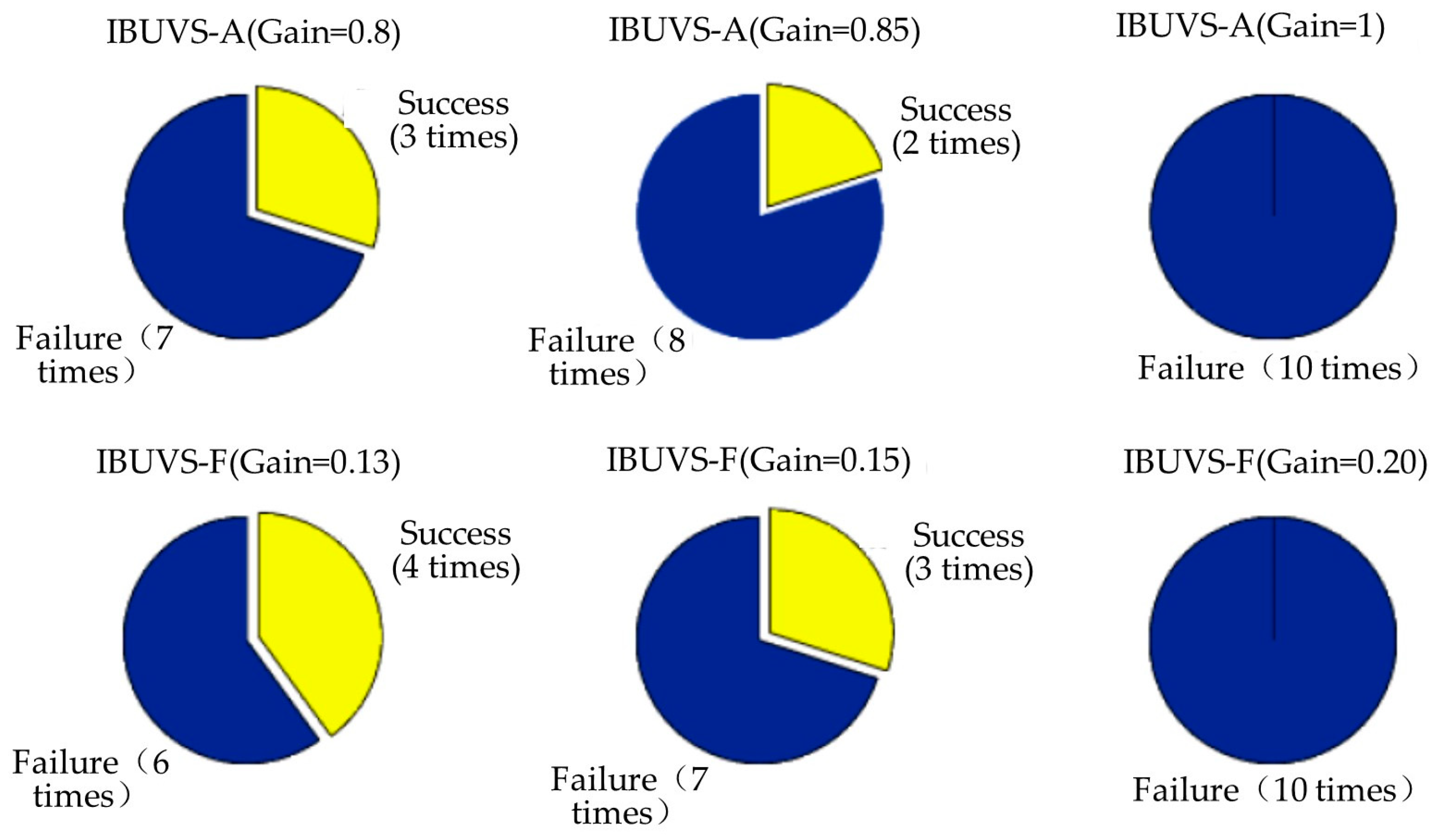
5. Experiments and Results
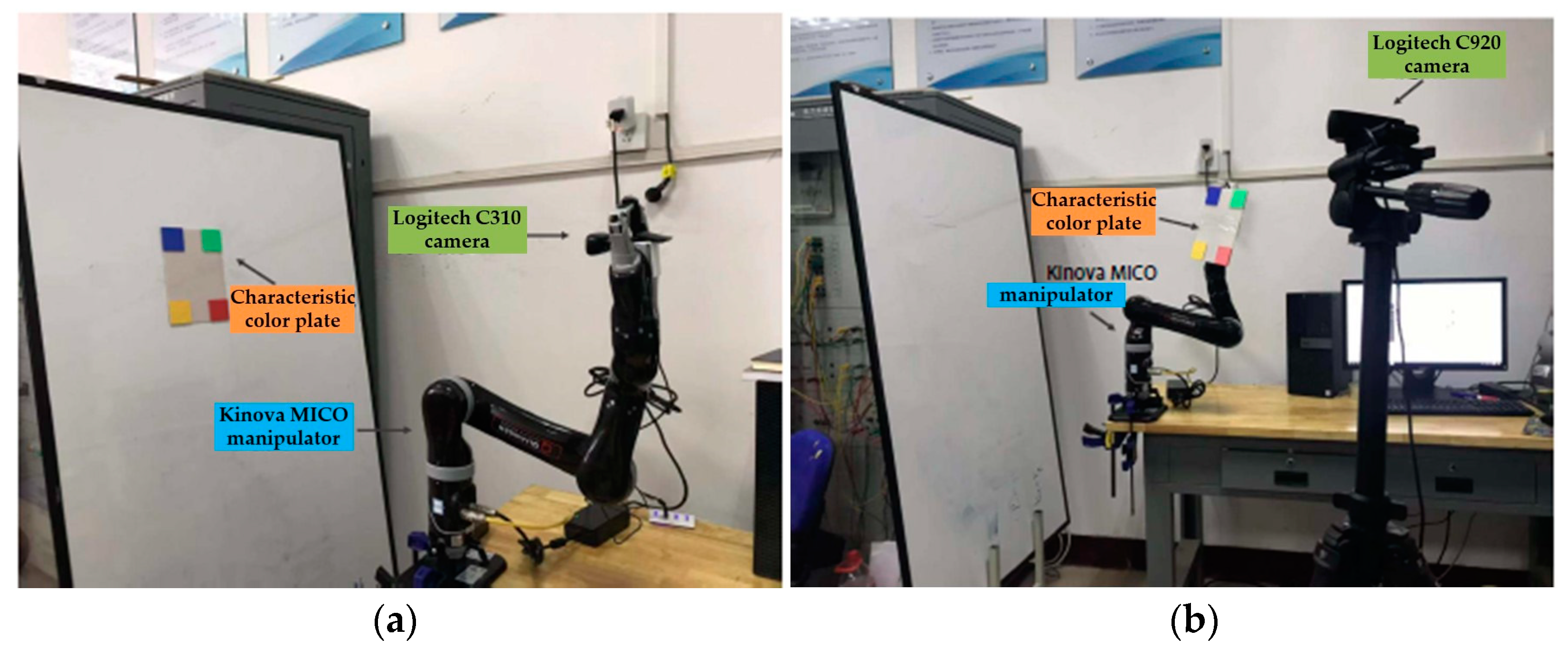
Experimental Platform
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of the Property 6
Appendix B. Proof of the Property 7
Appendix C. Proof of the Property 8
References
- Bai, Y.; Zhang, B.; Xu, N.; Zhou, J.; Shi, J.; Zhi, H. Vision-based navigation and guidance for agricultural autonomous vehicles and robots: A review. Comput. Electron. Agric. 2023, 205, 107584. [Google Scholar] [CrossRef]
- Kmich, M.; Karmouni, H.; Harrade, I.; Daoui, A.; Sayyouri, M. Image-Based Visual Servoing Techniques for Robot Control. In Proceedings of the 2022 International Conference on Intelligent Systems and Computer Vision (ISCV), Fez, Morocco, 18–20 May 2022. [Google Scholar]
- Jiang, J.; Wang, Y.; Jiang, Y.; Xie, K.; Tan, H.; Zhang, H. A robust visual servoing controller for anthropomorphic manipulators with Field-of-View constraints and swivel-angle motion: Overcoming system uncertainty and improving control performance. IEEE Robot. Autom. Mag. 2022, 29, 104–114. [Google Scholar] [CrossRef]
- Zeng, H.; Lu, Z.; Lv, Y.; Qi, J. Adaptive Neural Network-based Visual Servoing with Integral Sliding Mode Control for Manipulator. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022. [Google Scholar]
- Zheng, T.; Zhang, J.; Zhu, H. Uncalibrated Visual Servo System Based on Kalman Filter Optimized by Improved STOA. In Proceedings of the 2021 IEEE 2nd International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 17–19 December 2021. [Google Scholar]
- Keshavan, J.; Escobar-Alvarez, H.; Sean Humbert, J. An adaptive observer framework for accurate feature depth estimation using an uncalibrated monocular camera. Control Eng. Pract. 2016, 46, 59–65. [Google Scholar] [CrossRef]
- Oh, W.; Yoo, H.; Ha, T.; Oh, S. Local Selective Vision Transformer for Depth Estimation Using a Compound Eye Camera. Pattern Recognit. Lett. 2023, 167, 82–89. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, J.; Li, Y.; Zhang, X. Visual Tracking and Depth Estimation of Mobile Robots without Desired Velocity Information. IEEE Trans. Cybern. 2020, 50, 361–373. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, H. Adaptive Image-based Visual Servoing of Mobile Manipulator with an Uncalibrated Fixed Camera. In Proceedings of the 2020 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Hokkaido, Japan, 28–29 September 2020. [Google Scholar]
- Fried, J.; Leite, A.C.; Lizarralde, F. Uncalibrated image-based visual servoing approach for translational trajectory tracking with an uncertain robot manipulator. Control Eng. Pract. 2023, 130, 105363. [Google Scholar] [CrossRef]
- Liang, X.; Wang, H.; Liu, Y.-H.; You, B.; Liu, Z.; Jing, Z.; Chen, W. Fully Uncalibrated Image-Based Visual Servoing of 2DOFs Planar Manipulators with a Fixed Camera. IEEE Trans. Cybern. 2022, 52, 10895–10908. [Google Scholar] [CrossRef] [PubMed]
- Ghasemi, A.; Xie, W.-F. Adaptive Image-Based Visual Servoing of 6 DOF Robots Using Switch Approach. In Proceedings of the 2018 IEEE International Conference on Information and Automation (ICIA), Wuyishan, China, 11–13 August 2018. [Google Scholar] [CrossRef]
- Sarapura, J.A.; Roberti, F.; Gimenez, F.; Patiño, D.; Carelli, R. Adaptive Visual Servoing Control of a Manipulator with Uncertainties in Vision and Dynamics. In Proceedings of the 2018 Argentine Conference on Automatic Control (AADECA), Buenos Aires, Argentina, 7–9 November 2018. [Google Scholar] [CrossRef]
- Li, T.; Qiu, Q.; Zhao, C. Hybrid Visual Servoing Tracking Control of Uncalibrated Robotic Systems for Dynamic Dwarf Culture Orchards Harvest. In Proceedings of the 2021 IEEE International Conference on Development and Learning (ICDL), Beijing, China, 23–26 August 2021. [Google Scholar] [CrossRef]
- Hou, Y.; Wang, H.; Wei, Y.; Iu, H.H.-C.; Fernando, T. Robust adaptive finite-time tracking control for Intervention-AUV with input saturation and output constraints using high-order control barrier function. Ocean. Eng. 2023, 268, 113219. [Google Scholar] [CrossRef]
- Moudoud, B.; Aissaoui, H.; Diany, M. Fixed-Time non-singular Fast TSM control for WMR with disturbance observer. IFAC-PapersOnLine 2022, 55, 647–652. [Google Scholar] [CrossRef]
- Sun, L.; Liu, Y. Extended state observer augmented finite-time trajectory tracking control of uncertain mechanical systems. Mech. Syst. Signal Process. 2020, 139, 106374. [Google Scholar] [CrossRef]
- Galicki, M. Finite-time trajectory tracking control in a task space of robotic manipulators. Automatica 2016, 67, 165–170. [Google Scholar] [CrossRef]
- Huang, Y.; Meng, Z. Global finite-time distributed attitude synchronization and tracking control of multiple rigid bodies without velocity measurements. Automatica 2021, 132, 109796. [Google Scholar] [CrossRef]
- Li, T.; Zhao, H. Global finite-time adaptive control for uncalibrated robot manipulator based on visual servoing. ISA Trans. 2017, 68, 402–411. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Yang, L.; Wang, C.; Lai, G.; Chen, Y. Adaptive finite-time tracking control of robot manipulators with multiple uncertainties based on a low-cost neural approximator. J. Frankl. Inst. 2022, 359, 4938–4958. [Google Scholar] [CrossRef]
- Huang, T.; Sun, Y.; Tian, D. Finite-time stability of positive switched time-delay systems based on linear time-varying copositive Lyapunov functional. J. Frankl. Inst. 2022, 359, 2244–2258. [Google Scholar] [CrossRef]
- Yu, X.; Yin, J.; Khoo, S. Generalized Lyapunov criteria on finite-time stability of stochastic nonlinear systems. Automatica 2019, 107, 183–189. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Wang, Q.-G.; Yu, J. Convex Optimization-Based Adaptive Fuzzy Control for Uncertain Nonlinear Systems with Input Saturation Using Command Filtered Backstepping. IEEE Trans. Fuzzy Syst. 2023, 31, 2086–2091. [Google Scholar] [CrossRef]
- Bu, X.; Jiang, B.; Lei, H. Performance Guaranteed Finite-Time Non-Affine Control of Waverider Vehicles without Function-Approximation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3252–3262. [Google Scholar] [CrossRef]
- Bu, X.; Lv, M.; Lei, H.; Cao, J. Fuzzy neural pseudo control with prescribed performance for waverider vehicles: A fragility-avoidance approach. IEEE Trans. Cybern. 2023, 53, 4986–4999. [Google Scholar] [CrossRef]
- Bu, X.; Hua, C.; Lv, M.; Wu, Z. Flight Control of Waverider Vehicles with Fragility-avoidance Prescribed Performance. In IEEE Transactions on Aerospace and Electronic Systems; IEEE: Piscataway, NJ, USA, 2023. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, S. Homography-based platooning control of mobile robots. Control Theory Appl. 2019, 36, 1382–1390. [Google Scholar]
- Su, Y. Global continuous finite-time tracking of robot manipulators. Int. J. Robust Nonlinear Control 2009, 19, 1871–1885. [Google Scholar] [CrossRef]
- Sun, F.; Guan, Z. Finite-time consensus for leader-following second-order multi-agent system. Int. J. Syst. Sci. 2013, 44, 727–738. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 2004. [Google Scholar]
- Hong, Y.; Cheng, D. Analysis and Control of Nonlinear Systems; Science Press: Beijing, China, 2005. [Google Scholar]
- Su, Y. Control Theory of Nonlinear Robot Systems; Science Press: Beijing, China, 2008. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Visual configurations | ||||
| Scenes | [] | (t) | ||
| Hand-eye relationships | [] | (t) |
| Equipment | Model | Configuration Parameters |
|---|---|---|
| Computer | Dell OptiPlex 7050 (Dell, Round Rock, TX, USA) | Intel Core i7-2.80 GHz CPU, 8 GBs RAM |
| camera | LogitechC920 (Logitech, Lausanne, Switzerland) | dynamic DPI: 1280 × 720 static DPI 1280 × 960 maximum frame frequency 30 FPS |
| LogitechC310 (Logitech) | dynamic DPI: 1280 × 720 static DPI 1280 × 960 maximum frame frequency 30 FPS | |
| robot manipulator | Kinova MICO (Kinova Robotics, Montreal, QC, Canada) | 6 DOF Bionic robotic arm, Table 3 lists the DH parameters. |
| Serial Number | Joint Offset d (m) | The Length of the Common Perpendicular a (m) | Angle of Torsion α (rad) |
|---|---|---|---|
| 1 | 0.2755 | 0 | 0 |
| 2 | 0 | 0 | |
| 3 | 0 | 0.2900 | 0 |
| 4 | 0.1661 | 0 | |
| 5 | 0.0856 | 0 | 1.0472 |
| 6 | 0.2028 | 0.2900 | 1.0472 |
| Contrast Group | Scheme | Gain | Convergence Time |
|---|---|---|---|
| 1 | IBUVS-A | 0.6 | 3.854 s |
| IBUVS-AAG | 3.610 s | ||
| IBUVS-F | 0.10 | 3.993 s | |
| 2 | IBUVS-A | 0.50 | 5.181 s |
| IBUVS-AAG | 4.950 s | ||
| IBUVS-F | 0.08 | 4.950 s | |
| 3 | IBUVS-A | 0.35 | 7.494 s |
| IBUVS-AAG | 6.798 s | ||
| IBUVS-F | 0.06 | 5.478 s | |
| 4 | IBUVS-A | 0.23 | 11.583 s |
| IBUVS-AAG | 7.887 s | ||
| IBUVS-F | 0.05 | 5.808 s | |
| 5 | IBUVS-A | 0.15 | 16.175 s |
| IBUVS-AAG | 10.865 s | ||
| IBUVS-F | 0.04 | 6.171 s | |
| 6 | IBUVS-A | 0.10 | 18.315 s |
| IBUVS-AAG | 13.266 s | ||
| IBUVS-F | 0.03 | 7.293 s | |
| 7 | IBUVS-A | 0.05 | 36.033 s |
| IBUVS-AAG | 28.017 s | ||
| IBUVS-F | 0.02 | 16.170 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Wang, J.; Zhao, H. Design of A Finite-Time Adaptive Controller for Image-Based Uncalibrated Visual Servo Systems with Uncertainties in Robot and Camera Models. Sensors 2023, 23, 7133. https://doi.org/10.3390/s23167133
Zhao Z, Wang J, Zhao H. Design of A Finite-Time Adaptive Controller for Image-Based Uncalibrated Visual Servo Systems with Uncertainties in Robot and Camera Models. Sensors. 2023; 23(16):7133. https://doi.org/10.3390/s23167133
Chicago/Turabian StyleZhao, Zhuoqun, Jiang Wang, and Hui Zhao. 2023. "Design of A Finite-Time Adaptive Controller for Image-Based Uncalibrated Visual Servo Systems with Uncertainties in Robot and Camera Models" Sensors 23, no. 16: 7133. https://doi.org/10.3390/s23167133
APA StyleZhao, Z., Wang, J., & Zhao, H. (2023). Design of A Finite-Time Adaptive Controller for Image-Based Uncalibrated Visual Servo Systems with Uncertainties in Robot and Camera Models. Sensors, 23(16), 7133. https://doi.org/10.3390/s23167133