
Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles

Abstract
:1. Introduction
2. Materials and Methods
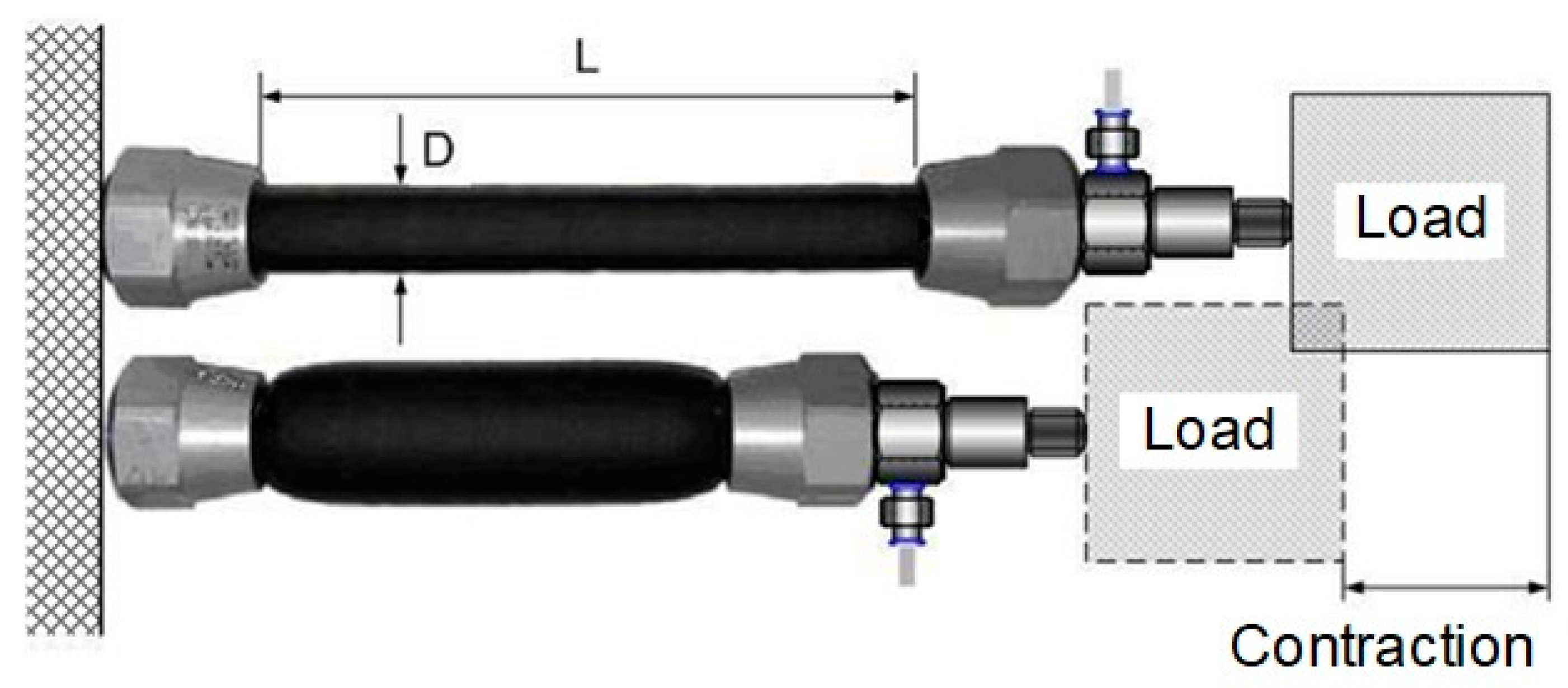
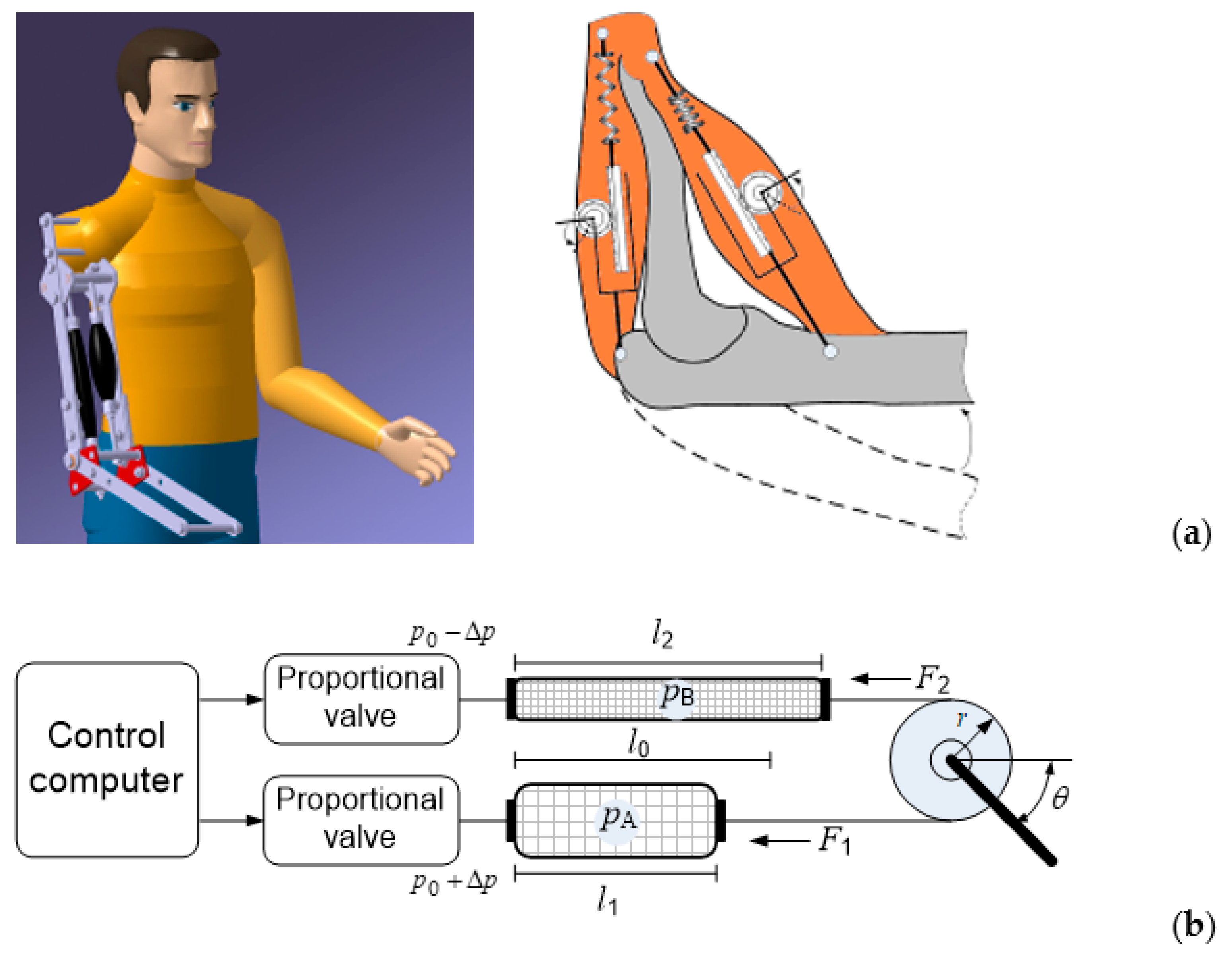
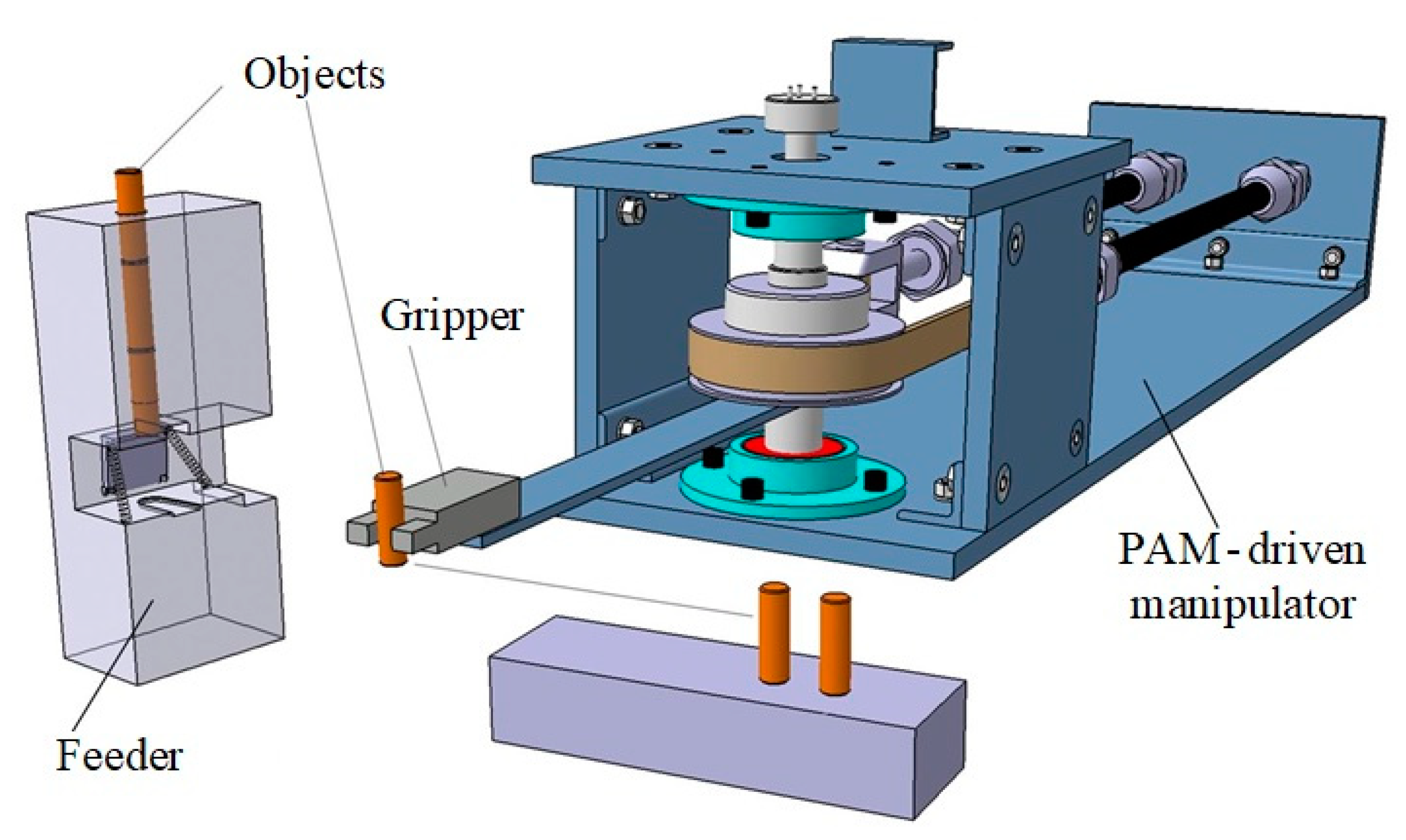
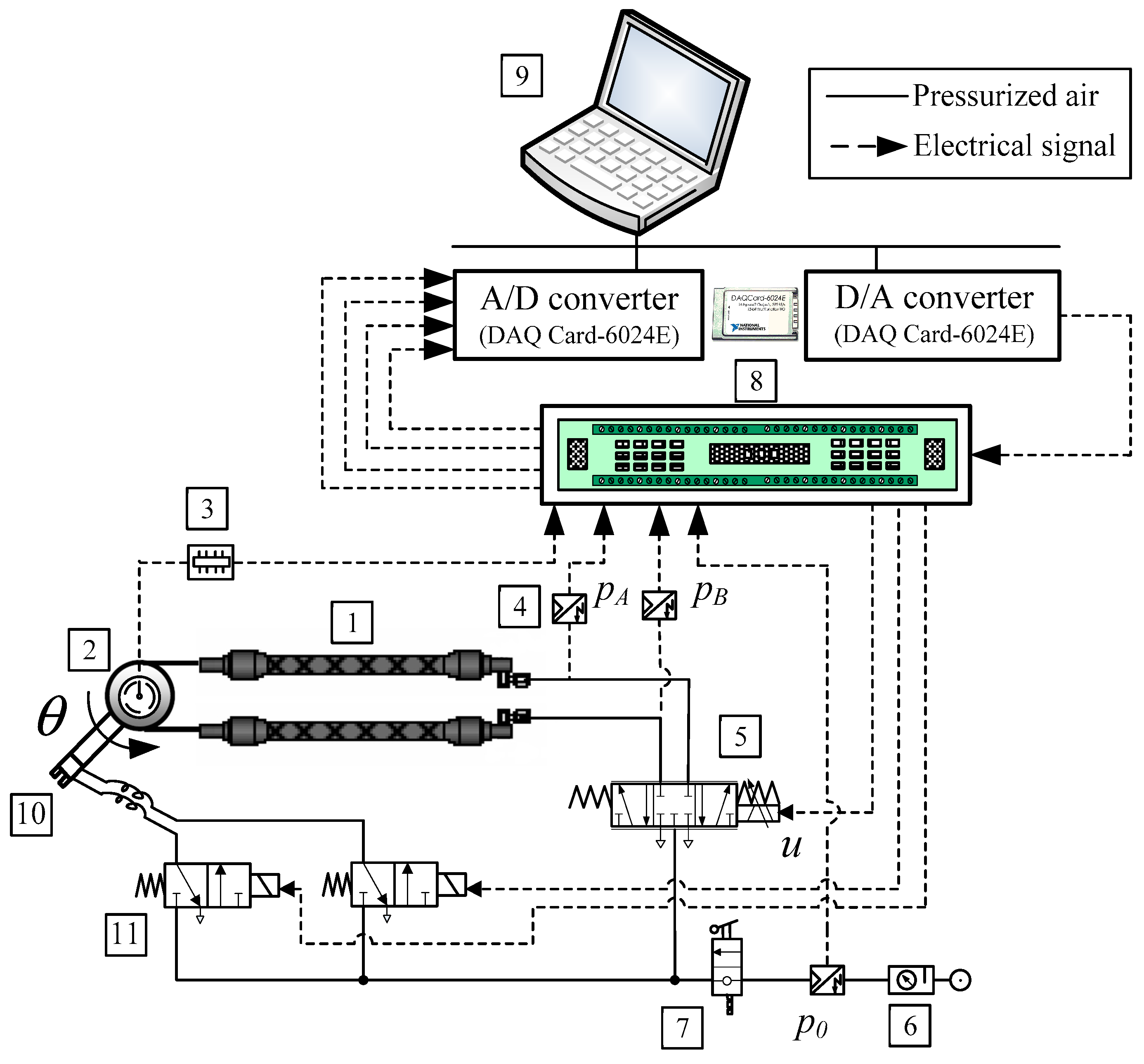
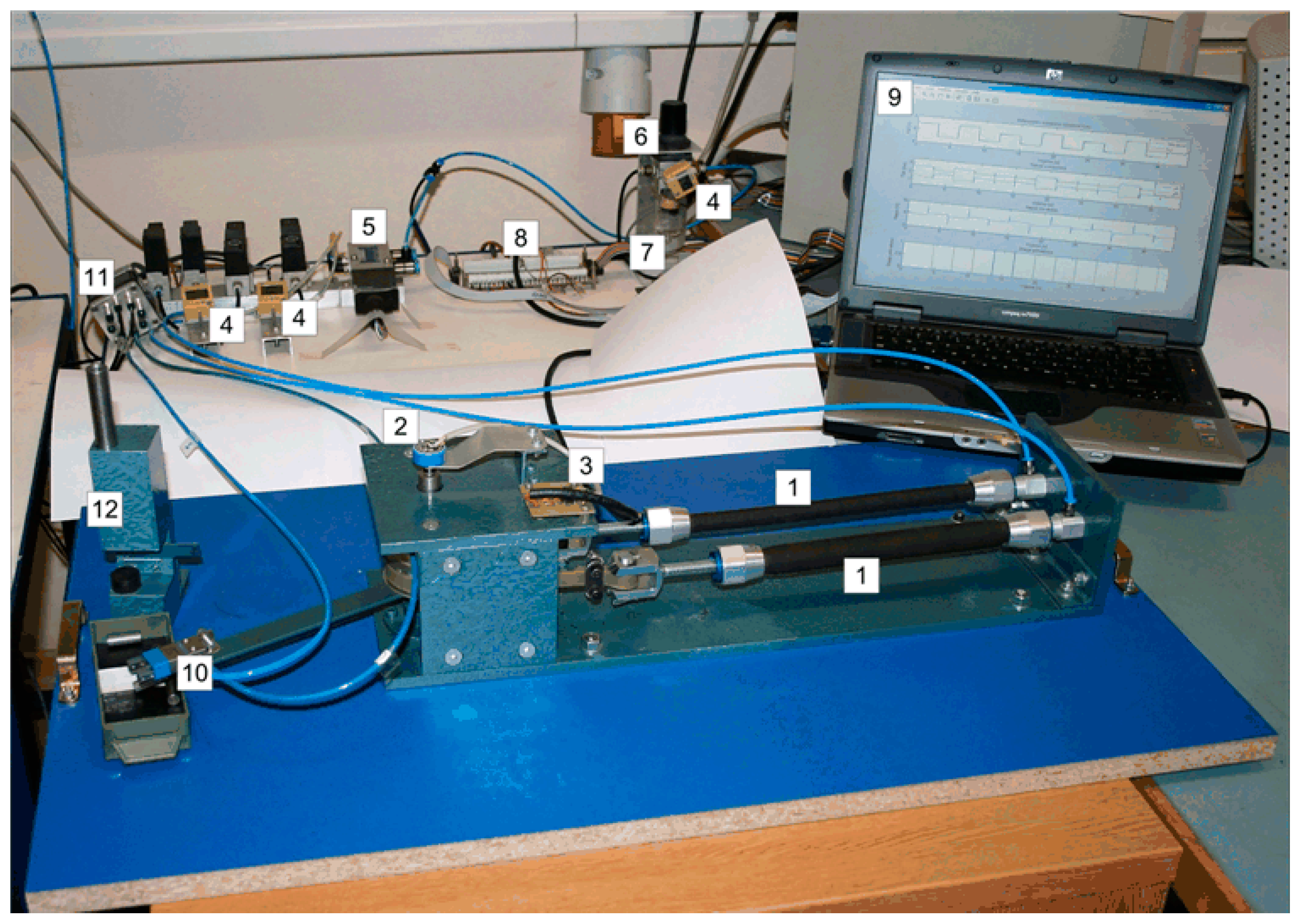
2.1. Manipulator Arm Actuated by Pneumatic Artificial Muscles
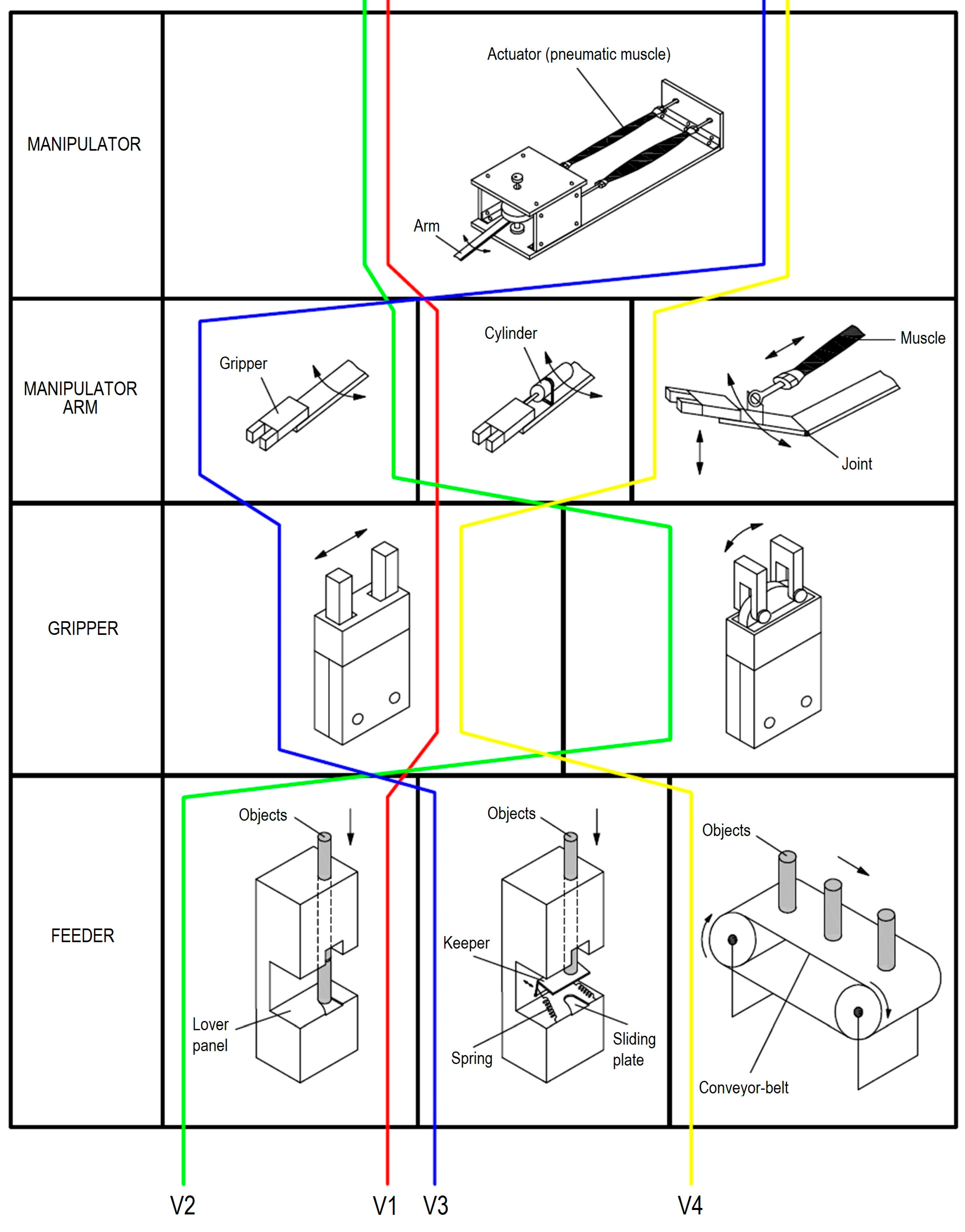
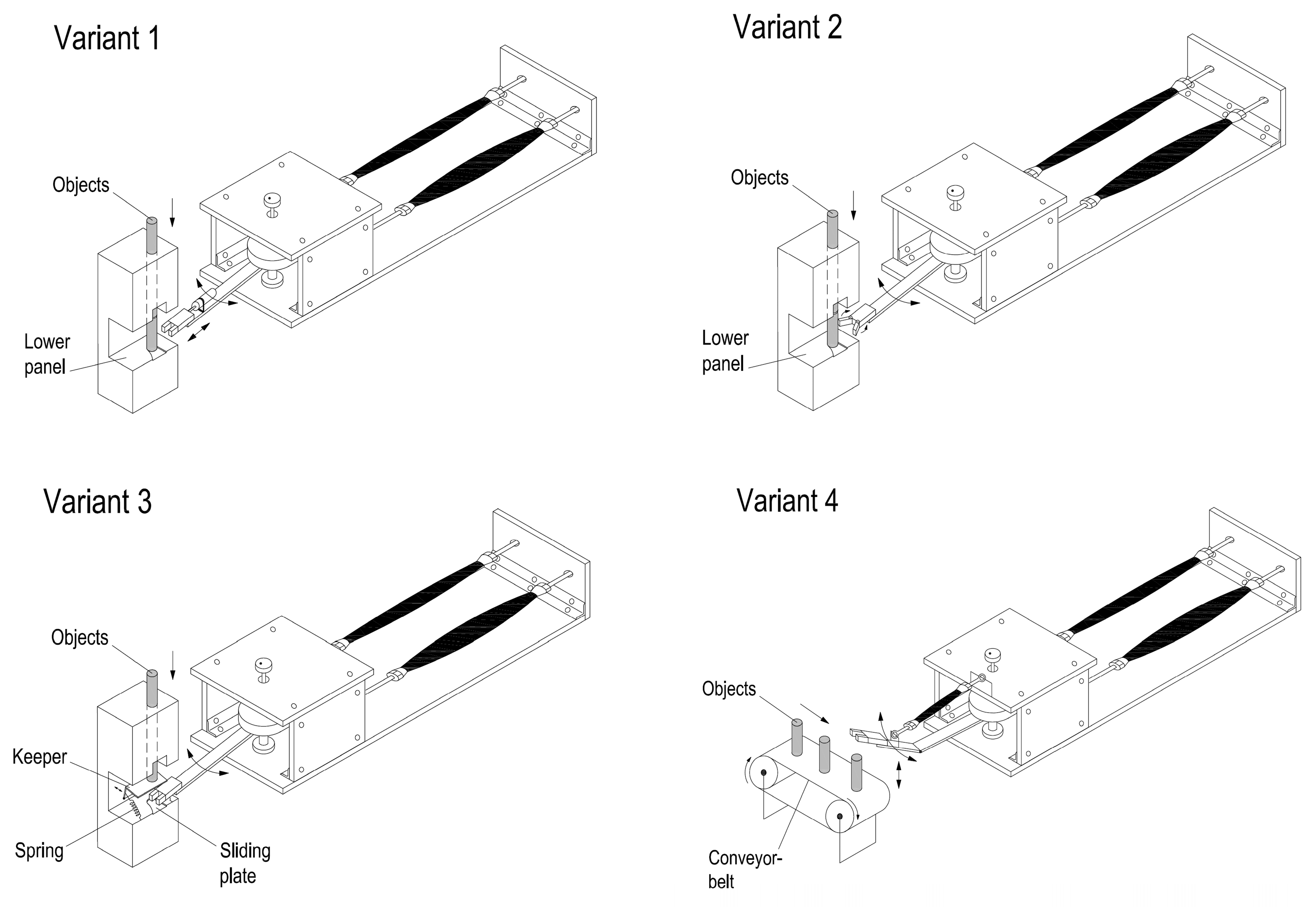
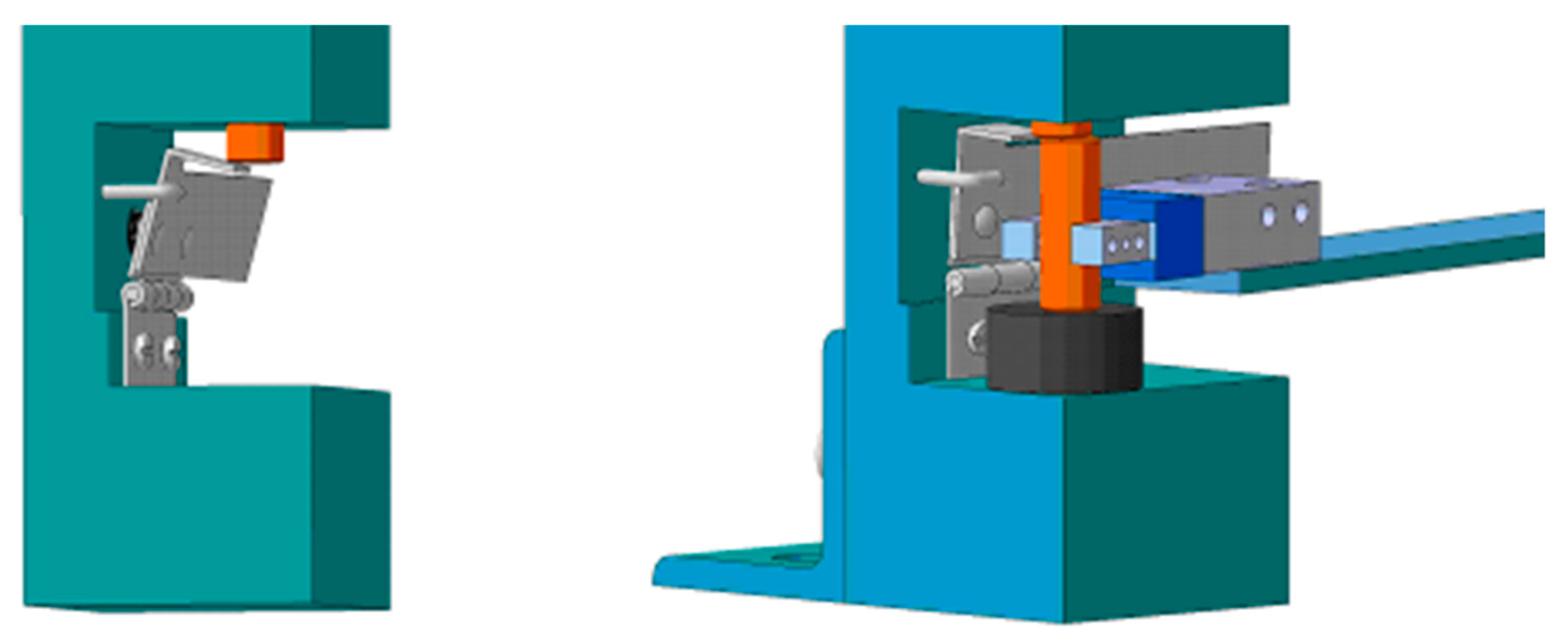
2.2. Construction Concepts for the System Realization
2.3. System Modelling and Control
2.4. State-Space Model of the System
2.5. Controller Design
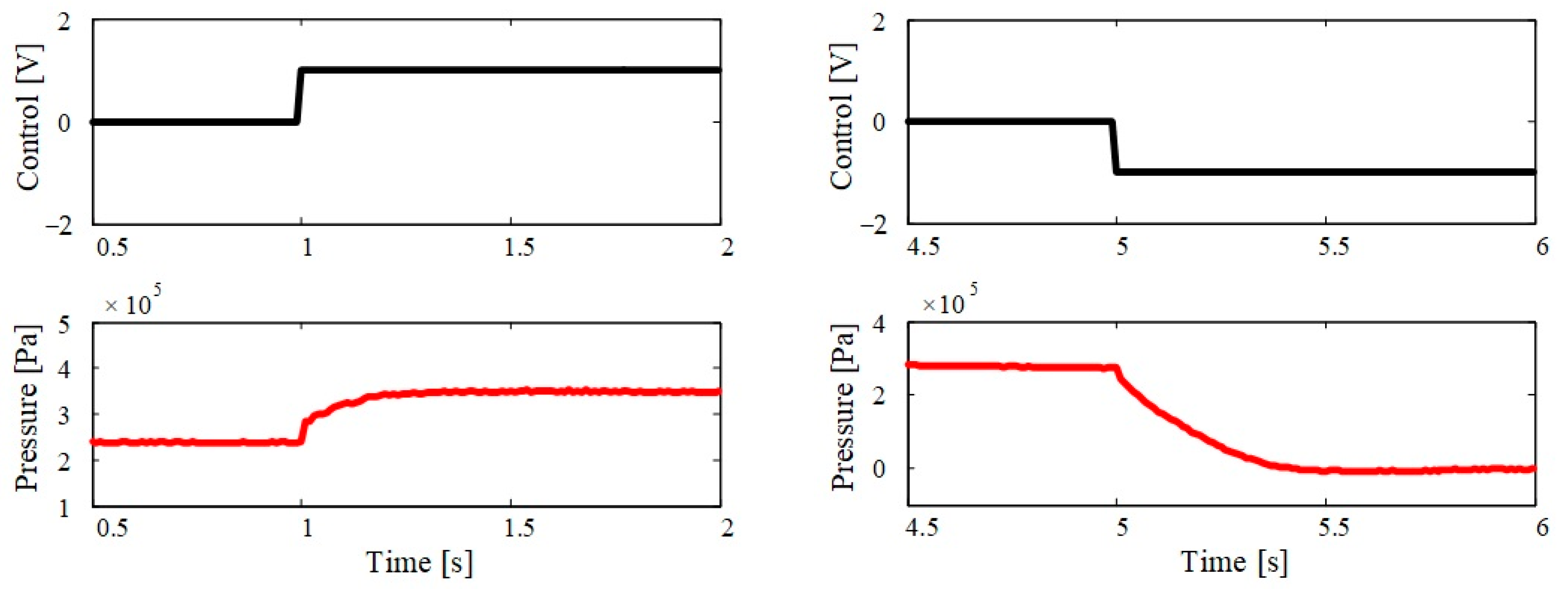
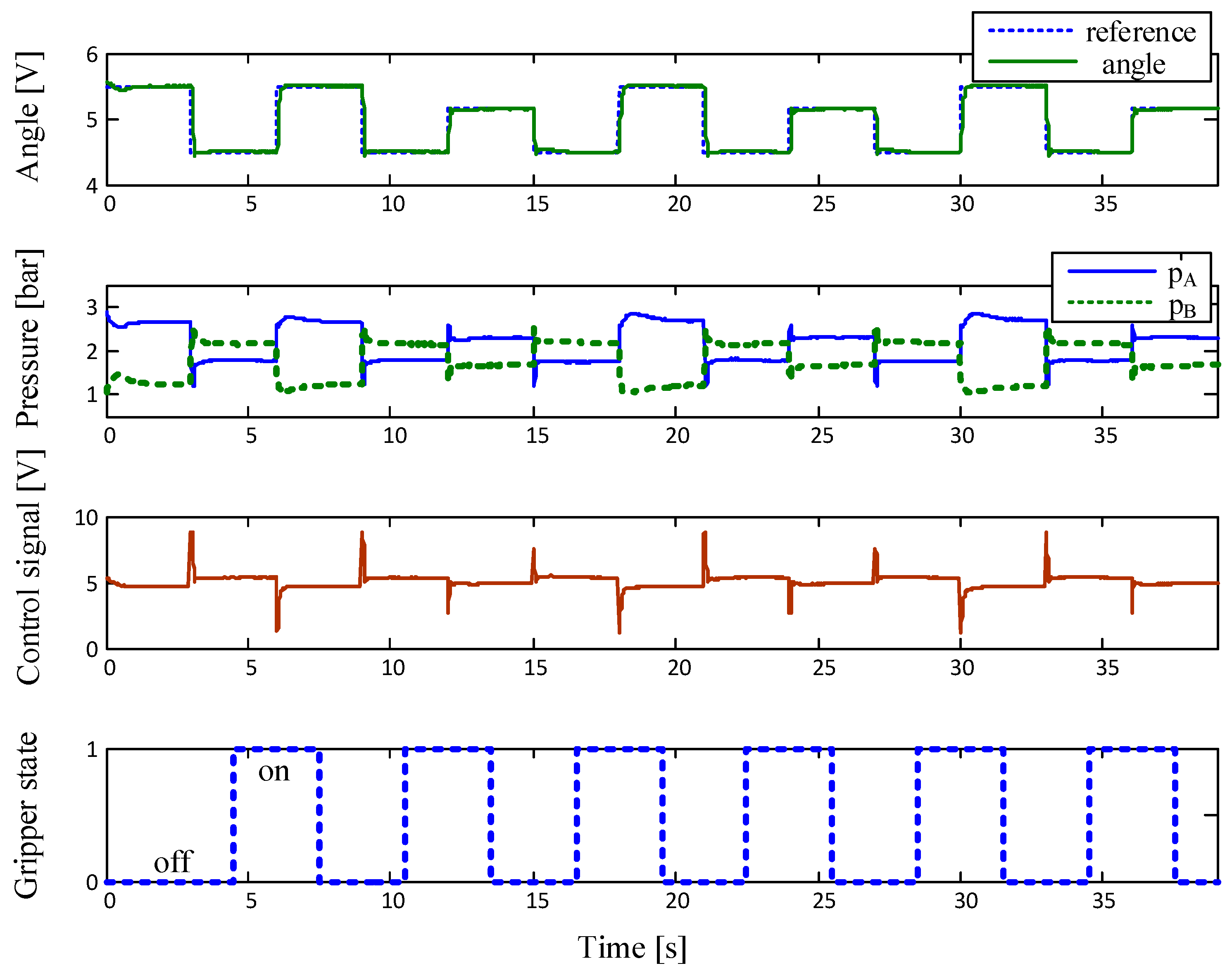
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kalita, B.; Leonessa, A.; Dwivedy, S.K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application. Actuators 2022, 11, 288. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. Modeling and control of McKibben artificial muscle robot actuators. IEEE Control Syst. Mag. 2000, 20, 15–38. [Google Scholar]
- Chen, D.; Ushijima, K. Prediction of the mechanical performance of McKibben artificial muscle actuator. Int. J. Mech. Sci. 2014, 78, 183–192. [Google Scholar] [CrossRef]
- Pack, R.T.; Christopher, J.L., Jr.; Kawamura, K. A Rubbertuator-Based Structure-Climbing Inspection Robot. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997. [Google Scholar]
- Smagt, P.; Groen, F.; Schulten, K. Analysis and control of a rubbertuator arm. Biol. Cybern. 1996, 75, 443–450. [Google Scholar]
- Shadow Robot Company. Design of a Dextrous Hand for Advanced CLAWAR Applications. Available online: www.shadowrobot.com (accessed on 4 October 2022).
- Martens, M.; Boblan, I. Modeling the Static Force of a Festo Pneumatic Muscle Actuator: A New Approach and a Comparison to Existing Models. Actuators 2017, 6, 33. [Google Scholar] [CrossRef] [Green Version]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Novel Considerations on static force modeling of pneumatic muscle actuators. IEEE/ASME Trans. Mechatron. 2016, 21, 2647–2659. [Google Scholar] [CrossRef]
- Beyl, P.; Van Damme, M.; Van Ham, R.; Vanderborght, B.; Lefeber, D. Pleated Pneumatic Artificial Muscle-Based Actuator System as a Torque Source for Compliant Lower Limb Exoskeletons. IEEE/ASME Trans. Mechatron. 2014, 19, 1046–1056. [Google Scholar] [CrossRef]
- Daerden, F.; Lefeber, D. Pneumatic Artificial Muscles: Actuators for robotics and automation. Eur. J. Mech. Environ. Eng. 2002, 47, 10–21. [Google Scholar]
- Schröder, J.; Kawamura, K.; Gockel, T.; Dillmann, R. Improved control of a humanoid arm driven by pneumatic actuators. In Proceedings of the Third IEEE International Conference on Humanoid Robots, Munich, Germany, 23 September 2003. [Google Scholar]
- Nguyen, H.T.; Trinh, V.C.; Le, T.D. An Adaptive Fast Terminal Sliding Mode Controller of Exercise-Assisted Robotic Arm for Elbow Joint Rehabilitation Featuring Pneumatic Artificial Muscle Actuator. Actuators 2020, 9, 118. [Google Scholar] [CrossRef]
- Zhao, L.; Cheng, H.; Zhang, J.; Xia, Y. Adaptive control for a motion mechanism with pneumatic artificial muscles subject to dead-zones. Mech. Syst. Signal Process. 2021, 148, 107155. [Google Scholar] [CrossRef]
- Dao, Q.T.; Mai, D.H.; Nguyen, D.K.; Ly, N.T. Adaptive Parameter Integral Sliding Mode Control of Pneumatic Artificial Muscles in Antagonistic Configuration. J. Control Autom. Electr. Syst. 2022, 33, 1116–1124. [Google Scholar] [CrossRef]
- Li, F.; Zhang, Z.; Wu, Y.; Chen, Y.; Liu, K.; Yao, J. Improved fuzzy sliding mode control in flexible manipulator actuated by PMAs. Robotica 2022, 40, 2683–2696. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Controlling of Pneumatic Muscle Actuator Systems by Parallel Structure of Neural Network and Proportional Controllers (PNNP). Front. Robot. AI 2020, 7, 115. [Google Scholar] [CrossRef] [PubMed]
- Jutras, D.; Bigras, P. Control of an Actuator Made of Two Antagonist McKibben Muscles via LMI Optimization. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–12 July 2006. [Google Scholar]
- Caldwell, D.G.; Tsagarakis, N. Biomimetic actuators in prosthetic and rehabilitation applications. Technol. Health Care 2002, 10, 107–120. [Google Scholar]
- Šitum, Ž.; Herceg, S. Design and Control of a Manipulator Arm Driven by Pneumatic Muscle Actuators. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008. [Google Scholar]
- Sarosi, J.; Biro, I.; Nemeth, J.; Cveticanin, L. Dynamic modeling of a pneumatic muscle actuator with two-direction motion. Mech. Mach. Theory 2015, 85, 25–34. [Google Scholar] [CrossRef]
- Kotkas, L.; Zhurkin, N.; Donskoy, A.; Zharkovskij, A. Design and Mathematical Modeling of a Pneumatic Artificial Muscle-Actuated System for Industrial Manipulators. Machines 2022, 10, 885. [Google Scholar] [CrossRef]
- Kim, J.Y.; Mazzoleni, N.; Bryant, M. Modeling of Resistive Forces and Buckling Behavior in Variable Recruitment Fluidic Artificial Muscle Bundles. Actuators 2021, 10, 42. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solution | Arm | Gripper | Feeder | Reliability | Total |
|---|---|---|---|---|---|
| P→C | P→C | P→C | in Operation | ||
| Variant 1 | 4→3 | 1→3 | 3→3 | 3 | 20 |
| Variant 2 | 5→2 | 5→2 | 3→3 | 2 | 22 |
| Variant 3 | 1→1 | 1→2 | 4→4 | 3 | 16 |
| Variant 4 | 3→5 | 1→2 | 5→5 | 5 | 26 |
| System Parameters | Values |
|---|---|
| Nominal diameter of the muscle | |
| Initial angle of the braided shell | |
| Initial contraction ratio of the muscle | |
| Radius of the pulley | |
| Fully contracted length of the muscle | |
| Fully relaxed length of the muscle | |
| Inertia of the mechanical rod | |
| Supply pressure | |
| Forward gain of the pneumatic process | |
| Time constant of the pneumatic process | |
| Pressure in the muscle at the neutral valve position |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Šitum, Ž.; Herceg, S.; Bolf, N.; Ujević Andrijić, Ž. Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles. Sensors 2023, 23, 776. https://doi.org/10.3390/s23020776
Šitum Ž, Herceg S, Bolf N, Ujević Andrijić Ž. Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles. Sensors. 2023; 23(2):776. https://doi.org/10.3390/s23020776
Chicago/Turabian StyleŠitum, Željko, Srečko Herceg, Nenad Bolf, and Željka Ujević Andrijić. 2023. "Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles" Sensors 23, no. 2: 776. https://doi.org/10.3390/s23020776
APA StyleŠitum, Ž., Herceg, S., Bolf, N., & Ujević Andrijić, Ž. (2023). Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles. Sensors, 23(2), 776. https://doi.org/10.3390/s23020776