
Research on Soil Moisture Estimation of Multiple-Track-GNSS Dual-Frequency Combination Observations Considering the Detection and Correction of Phase Outliers



Abstract
:1. Introduction
2. GNSS Combined Observations Estimate Soil Moisture Principle
2.1. GNSS-IR Near-Surface Forward Reflection Geometry
2.2. Errors Caused by Multipath Effects
2.3. The Proposed Combination of Observations
2.3.1. GNSS Observation Equation
2.3.2. Linear Combination of Dual-Frequency GNSS Observations
3. Generation, Detection and Correction of Abnormal Phases
3.1. Generation of Abnormal Phases
3.2. Detection and Correction of Abnormal Phases
4. Experiments and Results
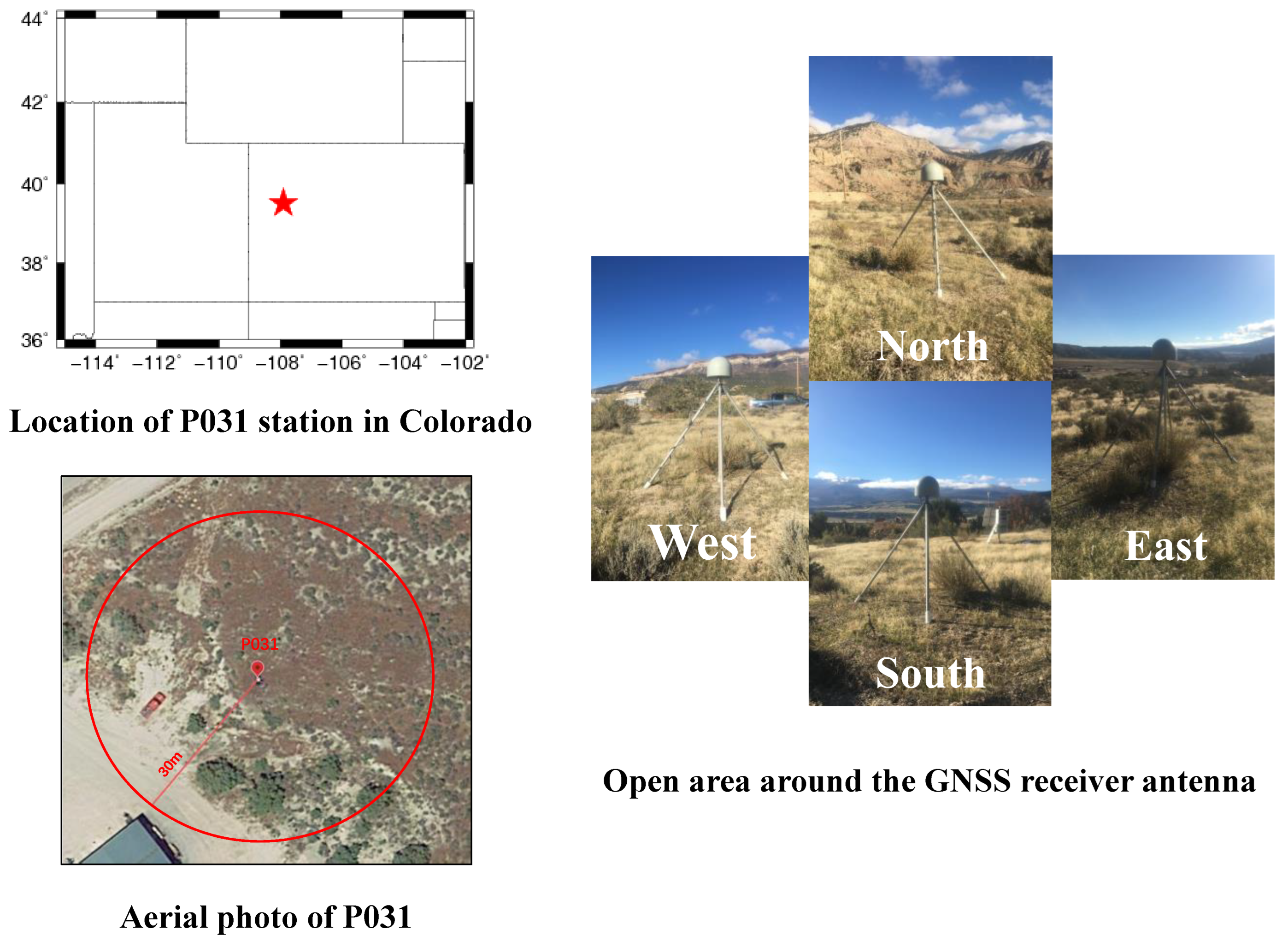
4.1. Experimental Datasets
4.2. Experimental Technical Route
- (1)
- Data preprocessing: Preprocessing of the observation (OBS) files and navigation (NAV) files obtained from the GNSS receiver. The TEQC software was used to extract essential parameters such as carrier phase observation, pseudorange observation, satellite elevation angle, satellite azimuth angle, and epoch information.
- (2)
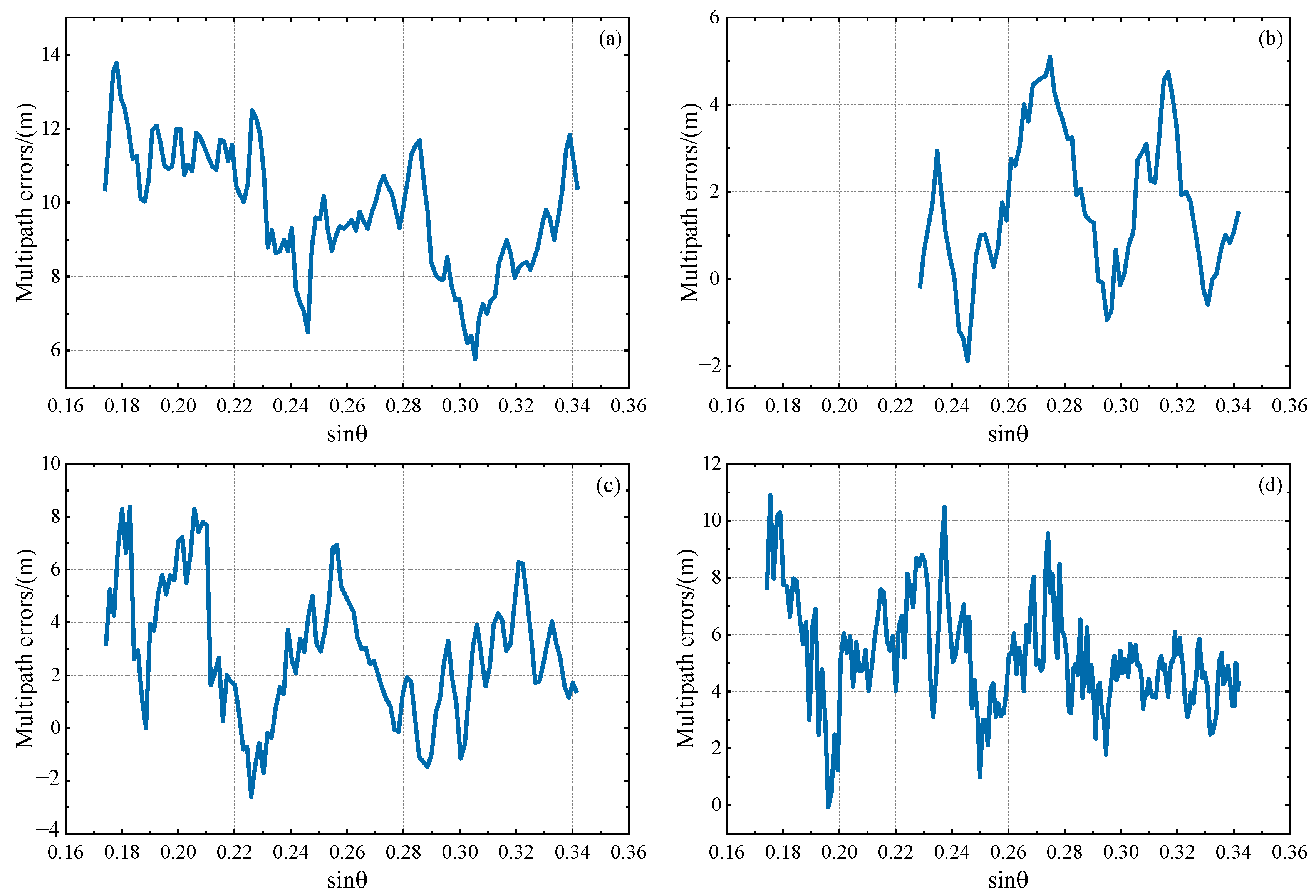
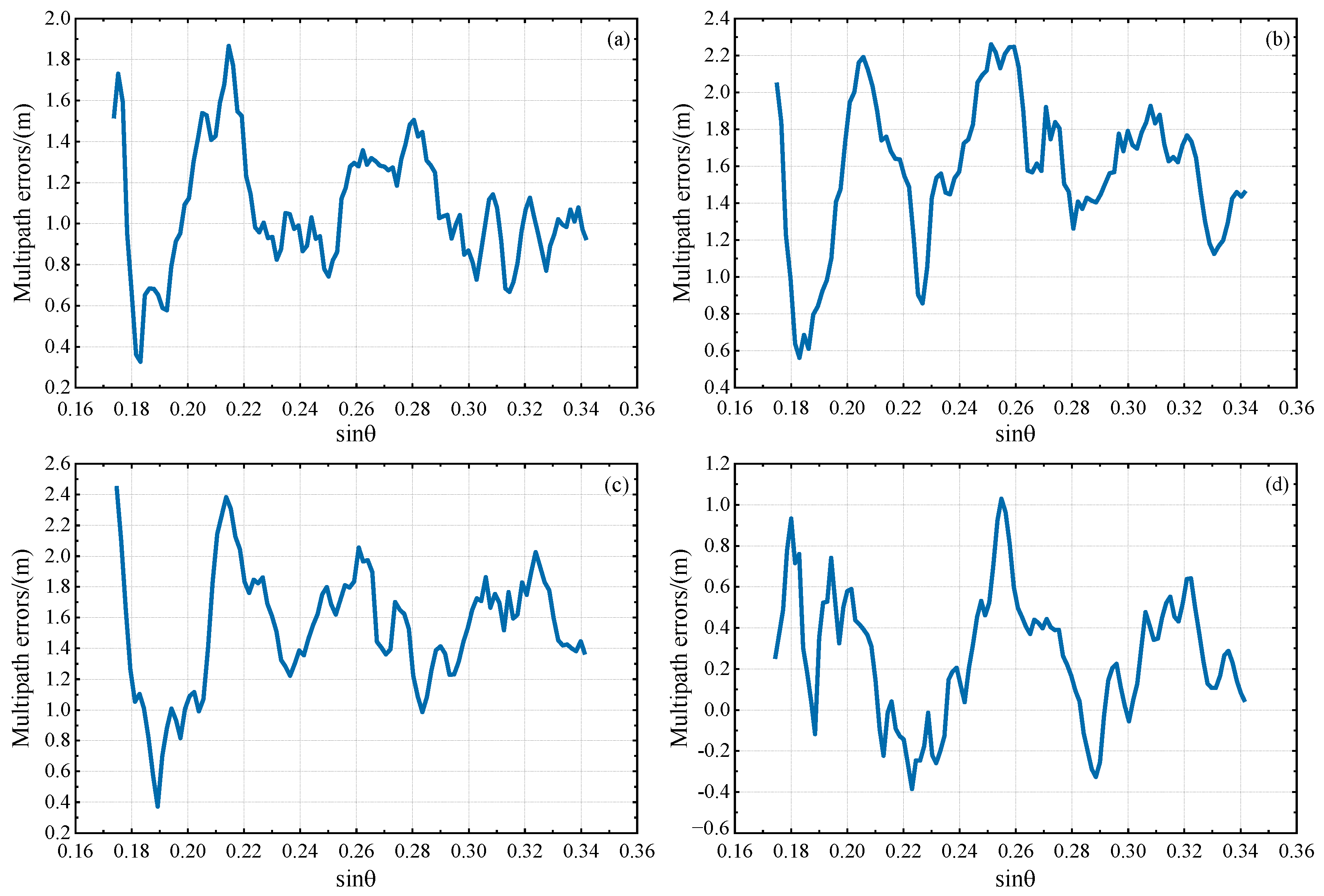
- Estimation of characteristic parameters: We constructed dual-frequency carrier phase and pseudorange linear combinations L4 and DFPC, respectively. The low-pass filter (LPF) was applied to remove the combined ionospheric delay and then we calculated combined multipath errors. By determining the initial values of path difference, delay phase, and amplitude attenuation factor, we established the indirect leveling error equation. Meanwhile, we extracted five combined multipath errors from the optimal elevation angle range of different effective satellites for participation in the calculation of single-satellite characteristic parameters.
- (3)
- Detection and correction of abnormal phases: The MCD method was employed to identify the locations of abnormal values in the delay phase. Subsequently, the detected abnormal phases were corrected and replaced using the moving average filter (MAF). Detection, correction, and replacement of abnormal delay phases of each satellite was conducted using MCD and MAF in succession. To reflect the effectiveness of the above methods for outlier detection and correction, Pearson correlation coefficients (R) were calculated separately for the delay phase before and after correction in relation to soil moisture.
- (4)
- Soil moisture estimation: The corrected multi-satellite delay phases and the corresponding soil moisture were divided into training and prediction sets. The training set was employed for model training to establish linear and nonlinear models, while the prediction set was used to estimate soil moisture and assess the accuracy of the model predictions.

4.3. Error Equation Establishment and Parameter Solving
4.4. Soil Moisture Estimates
5. Discussions
6. Concluding Remarks
- (1)
- Based on the carrier phase and pseudorange observation equations, it is known that after eliminating the effects of tropospheric delay, geometric distance factors, and ionospheric delay from the combination of GNSS dual-frequency observation values, the random noise components in the combined observations can result in anomalous feature parameters. To enhance the quality of the feature parameters and maintain the continuity of the feature parameter sequence, abnormal delay phases of all valid satellites need to be detected using the MCD method before modeling. Additionally, a moving average filter (MAF) should be used to correct the detected anomalies, resulting in a high-quality and continuous delay phase sequence. Subsequent to this correction, the correlation between the delay phase of each available satellite and soil moisture is improved to varying degrees compared to before the correction.
- (2)
- Both DFPC and L4 multipath errors can serve as substitutes for SNR in soil moisture retrieval, thereby enriching the data sources available for GNSS-IR. In the process of fusing data from multiple satellites to estimate soil moisture, the MLR and ELM models integrate multi-satellite phase delays from linear and nonlinear perspectives, respectively, and both models yield commendable prediction accuracies. However, it is worth noting that the accuracy of the ELM model surpasses that of the MLR model. This phenomenon can be attributed to the slight variations in environmental factors surrounding the measurement station in different directions. These variations result in a nonlinear functional relationship between soil moisture and multi-satellite phase delays, which is more effectively captured by the ELM model. In contrast, the linear function employed by the MLR model is less adept at representing this intricate relationship.
- (3)
- Compared to traditional SNR methods, when estimating the delay phase using DFPC and L4 multipath error sequences, there is no need for input signals within a large elevation angle range or analyzing the main frequency of multipath error signals. The computation of the combined multipath error requires only the selection of successive calendar elements with both elevation angle and multipath error information required for the calculation. With access to high-sampling-rate ground truth data on soil moisture for validation, this approach can achieve soil moisture estimation at high temporal resolution under the GPS system, with time resolution significantly improved to nearly an hour. As a result, it enables accurate and dynamic prediction of soil moisture with exceptional precision.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Hauser, M.; Orth, R.; Seneviratne, S.I. Role of soil moisture versus recent climate change for the 2010 heat wave in western Russia. Geophys. Res. Lett. 2016, 43, 2819–2826. [Google Scholar] [CrossRef]
- McNairn, H.; Merzouki, A.; Pacheco, A.; Fitzmaurice, J. Monitoring Soil Moisture to Support Risk Reduction for the Agriculture Sector Using RADARSAT-2. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 5, 824–834. [Google Scholar] [CrossRef]
- Abelen, S.; Seitz, F.; Abarca-del-Rio, R.; Guntner, A. Droughts and Floods in the La Plata Basin in Soil Moisture Data and GRACE. Remote Sens. 2015, 7, 7324–7349. [Google Scholar] [CrossRef]
- Ray, R.L.; Jacobs, J.M.; Cosh, M.H. Landslide susceptibility mapping using downscaled AMSR-E soil moisture: A case study from Cleveland Corral, California, US. Remote Sens. Environ. 2010, 114, 2624–2636. [Google Scholar] [CrossRef]
- Ray, R.L.; Jacobs, J.M. Relationships among remotely sensed soil moisture, precipitation and landslide events. Nat. Hazards 2007, 43, 211–222. [Google Scholar] [CrossRef]
- Burgin, M.S.; Colliander, A.; Njoku, E.G.; Chan, S.K.; Cabot, F.; Kerr, Y.H.; Bindlish, R.; Jackson, T.J.; Entekhabi, D.; Yueh, S.H. A Comparative Study of the SMAP Passive Soil Moisture Product with Existing Satellite-Based Soil Moisture Products. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2959–2971. [Google Scholar] [CrossRef]
- Kang, C.S.; Kanniah, K.D.; Kerr, Y.H. Calibration of SMOS Soil Moisture Retrieval Algorithm: A Case of Tropical Site in Malaysia. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3827–3839. [Google Scholar] [CrossRef]
- Ma, C.F.; Li, X.; McCabe, M.F. Retrieval of High-Resolution Soil Moisture through Combination of Sentinel-1 and Sentinel-2 Data. Remote Sens. 2020, 12, 2303. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Liang, S.L.; Zhu, Z.L.; Ma, H.; He, T. Soil moisture content retrieval from Landsat 8 data using ensemble learning. ISPRS J. Photogramm. Remote Sens. 2022, 185, 32–47. [Google Scholar] [CrossRef]
- Hegarty, C.J.; Chatre, E. Evolution of the Global Navigation Satellite System (GNSS). Proc. IEEE 2008, 96, 1902–1917. [Google Scholar] [CrossRef]
- Hajj, G.A.; Romans, L.J. Ionospheric electron density profiles obtained with the global positioning system: Results from the GPS/MET experiment. Radio Sci. 1998, 33, 175–190. [Google Scholar] [CrossRef]
- Rocken, C.; Anthes, R.; Exner, M.; Hunt, D.; Sokolovskiy, S.; Ware, R.; Gorbunov, M.; Schreiner, W.; Feng, D.; Herman, B.; et al. Analysis and validation of GPS/MET data in the neutral atmosphere. J. Geophys. Res. Atmos. 1997, 102, 29849–29866. [Google Scholar] [CrossRef]
- Yu, K.G.; Ban, W.; Zhang, X.H.; Yu, X.W. Snow Depth Estimation Based on Multipath Phase Combination of GPS Triple-Frequency Signals. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5100–5109. [Google Scholar] [CrossRef]
- Cardellach, E.; Ruffini, G.; Pino, D.; Rius, A.; Komjathy, A.; Garrison, J.L. Mediterranean Balloon Experiment: Ocean wind speed sensing from the stratosphere, using GPS reflections. Remote Sens. Environ. 2003, 88, 351–362. [Google Scholar] [CrossRef]
- Lowe, S.T.; Zuffada, C.; Chao, Y.; Kroger, P.; Young, L.E.; LaBrecque, J.L. 5-cm-precision aircraft ocean altimetry using GPS reflections. Geophys. Res. Lett. 2002, 29, 13-1–13-4. [Google Scholar] [CrossRef]
- Yan, Q.Y.; Huang, W.M. Sea Ice Thickness Measurement Using Spaceborne GNSS-R: First Results with TechDemoSat-1 Data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 577–587. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Yan, Q.Y.; Huang, W.M.; Jin, S.G.; Jia, Y. Pan-tropical soil moisture mapping based on a three-layer model from CYGNSS GNSS-R data. Remote Sens. Environ. 2020, 247, 111944. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Aguasca, A.; Vall-Ilossera, M.; Valencia, E.; Ramos-Perez, I.; Park, H. Review of crop growth and soil moisture monitoring from a ground-based instrument implementing the Interference Pattern GNSS-R Technique. Radio Sci. 2011, 46, 1–11. [Google Scholar] [CrossRef]
- Yu, K.G.; Li, Y.W.; Jin, T.Y.; Chang, X.; Wang, Q.; Li, J.C. GNSS-R-Based Snow Water Equivalent Estimation with Empirical Modeling and Enhanced SNR-Based Snow Depth Estimation. Remote Sens. 2020, 12, 3905. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Braun, J.J.; Zavorotny, V.U. Use of GPS receivers as a soil moisture network for water cycle studies. Geophys. Res. Lett. 2008, 35, L24405. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS multipath to measure soil moisture fluctuations: Initial results. Gps Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. GPS Multipath and Its Relation to Near-Surface Soil Moisture Content. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.E.; Larson, K.M. An algorithm for soil moisture estimation using GPS-interferometric reflectometry for bare and vegetated soil. GPS Solut. 2016, 20, 525–537. [Google Scholar] [CrossRef]
- Larson, K.M.; Gutmann, E.D.; Zavorotny, V.U.; Braun, J.J.; Williams, M.W.; Nievinski, F.G. Can we measure snow depth with GPS receivers? Geophys. Res. Lett. 2009, 36, L17502. [Google Scholar] [CrossRef]
- Li, Z.; Chen, P.; Zheng, N.Q.; Liu, H. Accuracy analysis of GNSS-IR snow depth inversion algorithms. Adv. Space Res. 2021, 67, 1317–1332. [Google Scholar] [CrossRef]
- Martineira, M. A Passive Reflectometry and Interferometry System (Paris)—Application to Ocean Altimetry. Esa J. Eur. Space Agency 1993, 17, 331–355. [Google Scholar]
- Xie, S.R. Continuous measurement of sea ice freeboard with tide gauges and GNSS interferometric reflectometry. Remote Sens. Environ. 2022, 280, 113165. [Google Scholar] [CrossRef]
- Vey, S.; Guntner, A.; Wickert, J.; Blume, T.; Ramatschi, M. Long-term soil moisture dynamics derived from GNSS interferometric reflectometry: A case study for Sutherland, South Africa. GPS Solut. 2016, 20, 641–654. [Google Scholar] [CrossRef]
- Yang, T.; Wan, W.; Chen, X.W.; Chu, T.X.; Hong, Y. Using BDS SNR Observations to Measure Near-Surface Soil Moisture Fluctuations: Results from Low Vegetated Surface. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1308–1312. [Google Scholar] [CrossRef]
- Ren, C.; Liang, Y.J.; Lu, X.J.; Yan, H.B. Research on the soil moisture sliding estimation method using the LS-SVM based on multi-satellite fusion. Int. J. Remote Sens. 2019, 40, 2104–2119. [Google Scholar] [CrossRef]
- Ozeki, M.; Heki, K. GPS snow depth meter with geometry-free linear combinations of carrier phases. J. Geod. 2012, 86, 209–219. [Google Scholar] [CrossRef]
- Li, Y.W.; Chang, X.; Yu, K.G.; Wang, S.Y.; Li, J.C. Estimation of snow depth using pseudorange and carrier phase observations of GNSS single-frequency signal. GPS Solut. 2019, 23, 118. [Google Scholar] [CrossRef]
- Yu, K.G.; Li, Y.W.; Chang, X. Snow Depth Estimation Based on Combination of Pseudorange and Carrier Phase of GNSS Dual-Frequency Signals. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1817–1828. [Google Scholar] [CrossRef]
- Wang, N.Z.; Xu, T.H.; Gao, F.; Xu, G.C. Sea Level Estimation Based on GNSS Dual-Frequency Carrier Phase Linear Combinations and SNR. Remote Sens. 2018, 10, 470. [Google Scholar] [CrossRef]
- Wang, N.Z.; Wang, J.; Xu, T.H.; Gao, F.; He, Y.Q.; Meng, X.Y. Applications of Ground-Based Multipath Reflectometry Based on Combinations of Pseudorange and Carrier Phase Observations of Multi-GNSS Dual-Frequency Signals. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 9557–9570. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Guo, F.; Zhang, X.H.; Pan, L. First result of GNSS-R-based sea level retrieval with CMC and its combination with the SNR method. GPS Solut. 2022, 26, 20. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Nie, S.H.; Zhang, C.K.; Zhang, J.; Cai, H. Soil moisture estimation based on triple-frequency multipath error. Int. J. Remote Sens. 2021, 42, 5955–5970. [Google Scholar] [CrossRef]
- Nie, S.A.; Wang, Y.X.; Tu, J.S.; Li, P.; Xu, J.H.; Li, N.; Wang, M.K.; Huang, D.N.; Song, J. Retrieval of Soil Moisture Content Based on Multisatellite Dual-Frequency Combination Multipath Errors. Remote Sens. 2022, 14, 3193. [Google Scholar] [CrossRef]
- Liang, Y.J.; Lai, J.M.; Ren, C.; Lu, X.J.; Zhang, Y.; Ding, Q.; Hu, X.M. GNSS-IR multisatellite combination for soil moisture retrieval based on wavelet analysis considering detection and repair of abnormal phases. Measurement 2022, 203, 111881. [Google Scholar] [CrossRef]
- Bilich, A.; Axelrad, P.; Larson, K. Scientific Utility of the Signal-to-Noise Ratio (SNR) Reported by Geodetic GPS Receivers. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation 2007 Ion Gnss 2007, Fort Worth, TX, USA, 25–28 September 2007; p. 2. [Google Scholar]
- Zhang, Z.Y.; Guo, F.; Zhang, X.H. Triple-frequency multi-GNSS reflectometry snow depth retrieval by using clustering and normalization algorithm to compensate terrain variation. GPS Solut. 2020, 24, 52. [Google Scholar] [CrossRef]
- Kedar, S.; Hajj, G.A.; Wilson, B.D.; Heflin, M.B. The effect of the second order GPS ionospheric correction on receiver positions. Geophys. Res. Lett. 2003, 30, 1829. [Google Scholar] [CrossRef]
- Lomb, N.R. Least-squares frequency analysis of unequally spaced data. Astrophys. Space Sci. 1976, 39, 447–462. [Google Scholar] [CrossRef]
- Scargle, J.D. Studies in astronomical time series analysis. II-Statistical aspects of spectral analysis of unevenly spaced data. Astrophys. J. 1982, 263, 835–853. [Google Scholar] [CrossRef]
- Kris, D.B.; Jos, D.B. Robustness by Reweighting for Kernel Estimators: An Overview. Stat. Sci. 2021, 36, 578–594. [Google Scholar]
- Katzberg, S.J.; Torres, O.; Grant, M.S.; Masters, D. Utilizing calibrated GPS reflected signals to estimate soil reflectivity and dielectric constant: Results from SMEX02. Remote Sens. Environ. 2006, 100, 17–28. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameters |
|---|---|
| GNSS receiver type | SEPT POLARX5 |
| Sampling interval | 15.0 s |
| Antenna gain pattern | TRM59800.00 |
| Antenna center height | 1.8 m |
| GPS Satellite Number (PRN) | GPS Time Range/(hh:mm:ss) | Elevation Angle Range/(°) | Azimuth Angle Range/(°) |
|---|---|---|---|
| PRN1 | 14:24:00–14:25:00 | 13.578–13.96 | 319.221–319.145 |
| PRN3 | 15:55:45–15:56:45 | 18.041–18.416 | 307.636–307.789 |
| PRN6 | 7:3:45–7:4:45 | 14.796–14.452 | 59.2–59.4 |
| PRN8 | 14:52:45–14:53:45 | 11.48–11.22 | 254.51–254.147 |
| PRN10 | 16:49:45–16:50:45 | 10.757–10.377 | 133.761–133.97 |
| PRN24 | 14:38:00–14:39:00 | 11.028–10.687 | 39.3–39.1 |
| PRN25 | 9:22:30–9:23:30 | 16.796–16.408 | 205.4–205.2 |
| PRN26 | 10:49:00–10:50:00 | 12.763–12.52 | 259.341–258.964 |
| PRN27 | 14:11:45–14:12:45 | 16.694–16.368 | 232.956–232.716 |
| PRN30 | 20:54:45–20:55:45 | 14.674–14.978 | 273.4–273.7 |
| PRN32 | 17:16:30–17:17:30 | 20.891–20.58 | 82.549–82.885 |
| Method | Model | R | RMSE/(cm−3cm3) | STD/(cm−3cm3) | MAE/(cm−3cm3) |
|---|---|---|---|---|---|
| DFPC | MLR | 0.81 | 0.051 | 0.049 | 0.038 |
| ELM | 0.88 | 0.036 | 0.034 | 0.027 | |
| L4 | MLR | 0.84 | 0.049 | 0.047 | 0.036 |
| ELM | 0.90 | 0.033 | 0.031 | 0.021 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Ren, C.; Liang, Y.; Liang, J.; Yin, A.; Wei, Z. Research on Soil Moisture Estimation of Multiple-Track-GNSS Dual-Frequency Combination Observations Considering the Detection and Correction of Phase Outliers. Sensors 2023, 23, 7944. https://doi.org/10.3390/s23187944
Zhang X, Ren C, Liang Y, Liang J, Yin A, Wei Z. Research on Soil Moisture Estimation of Multiple-Track-GNSS Dual-Frequency Combination Observations Considering the Detection and Correction of Phase Outliers. Sensors. 2023; 23(18):7944. https://doi.org/10.3390/s23187944
Chicago/Turabian StyleZhang, Xudong, Chao Ren, Yueji Liang, Jieyu Liang, Anchao Yin, and Zhenkui Wei. 2023. "Research on Soil Moisture Estimation of Multiple-Track-GNSS Dual-Frequency Combination Observations Considering the Detection and Correction of Phase Outliers" Sensors 23, no. 18: 7944. https://doi.org/10.3390/s23187944
APA StyleZhang, X., Ren, C., Liang, Y., Liang, J., Yin, A., & Wei, Z. (2023). Research on Soil Moisture Estimation of Multiple-Track-GNSS Dual-Frequency Combination Observations Considering the Detection and Correction of Phase Outliers. Sensors, 23(18), 7944. https://doi.org/10.3390/s23187944