

Land and Seabed Surface Modelling in the Coastal Zone Using UAV/USV-Based Data Integration

Abstract
:1. Introduction
2. Materials and Methods
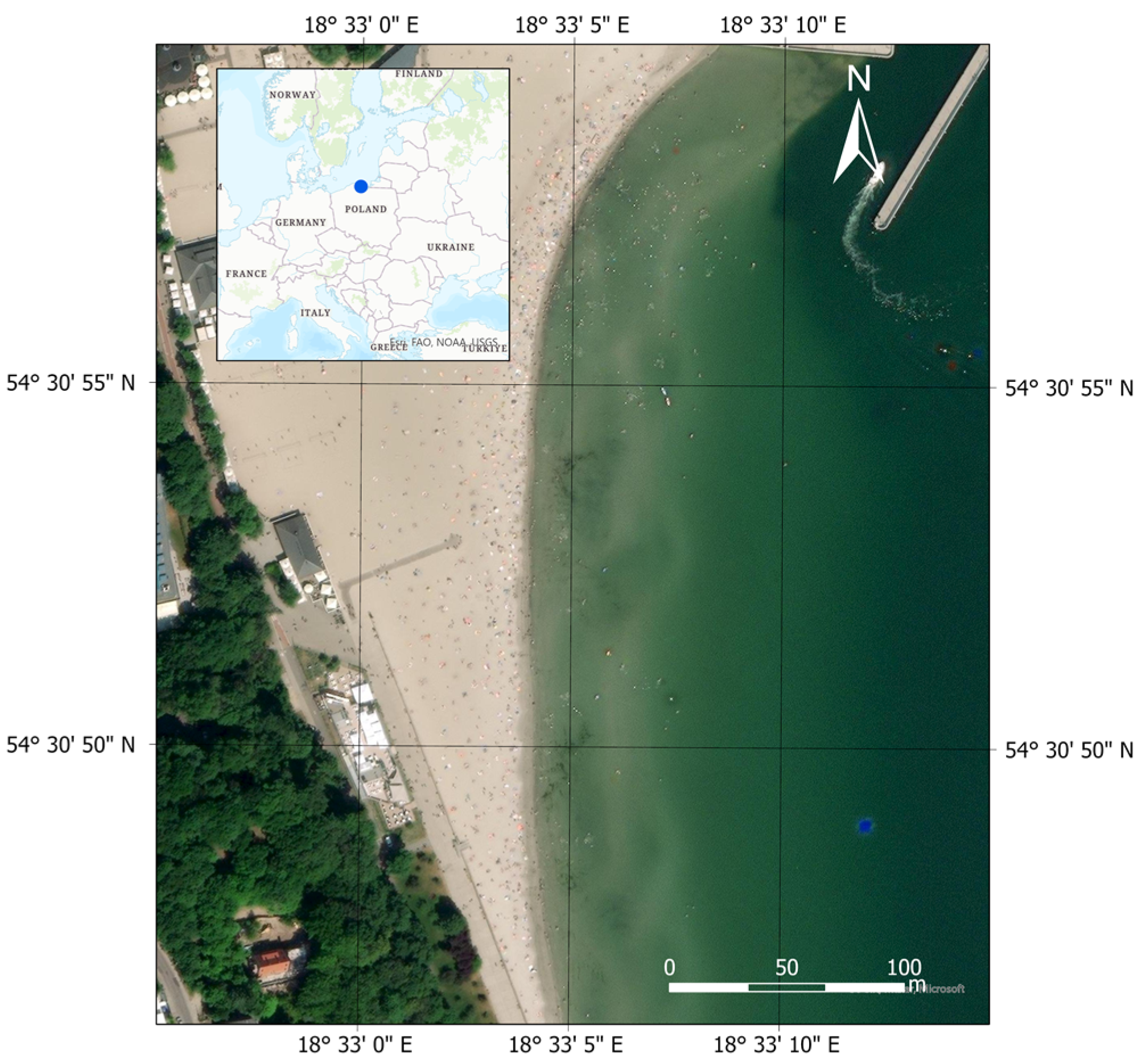
2.1. Measurement Place
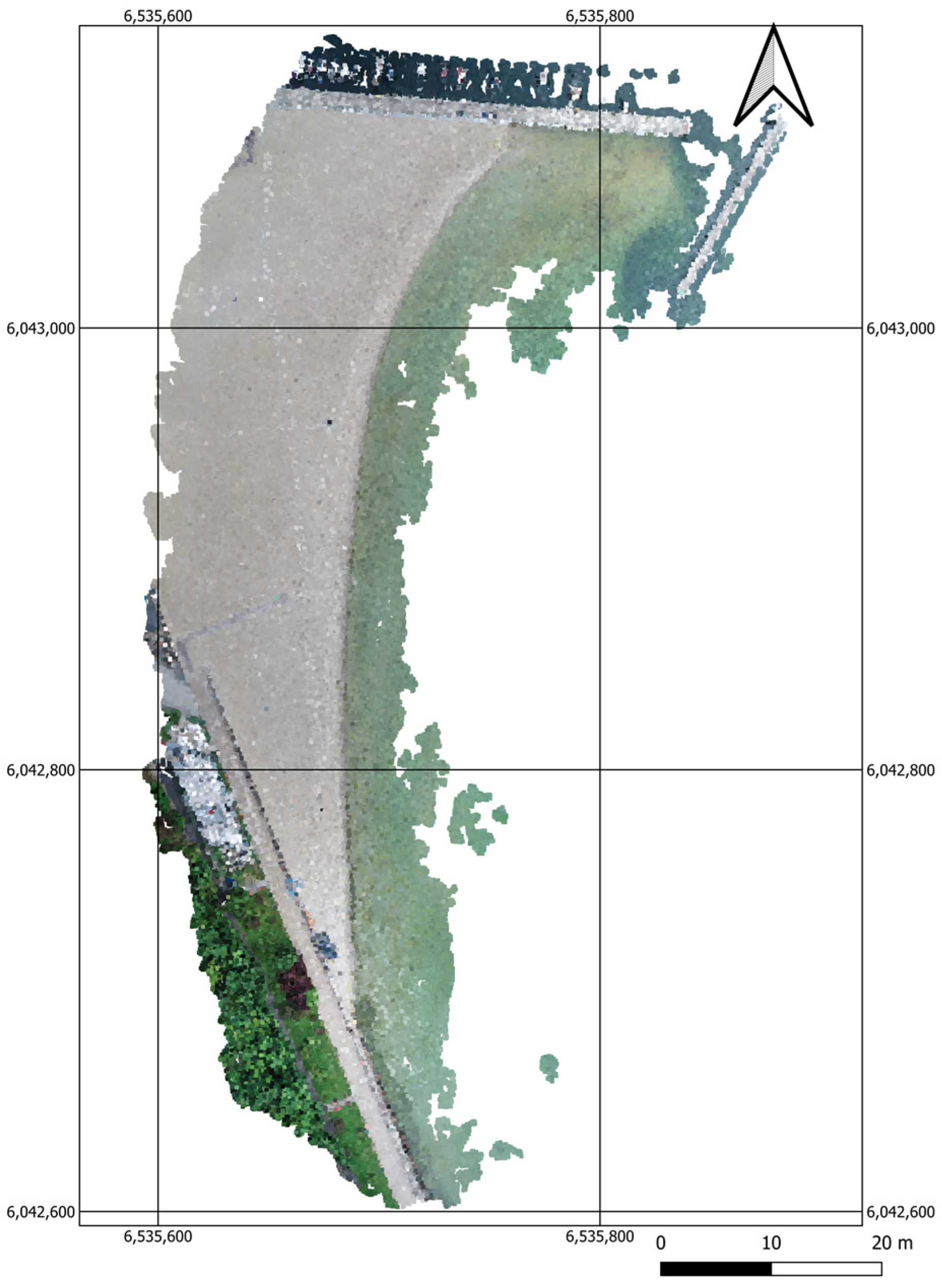
2.2. Photogrammetric Data
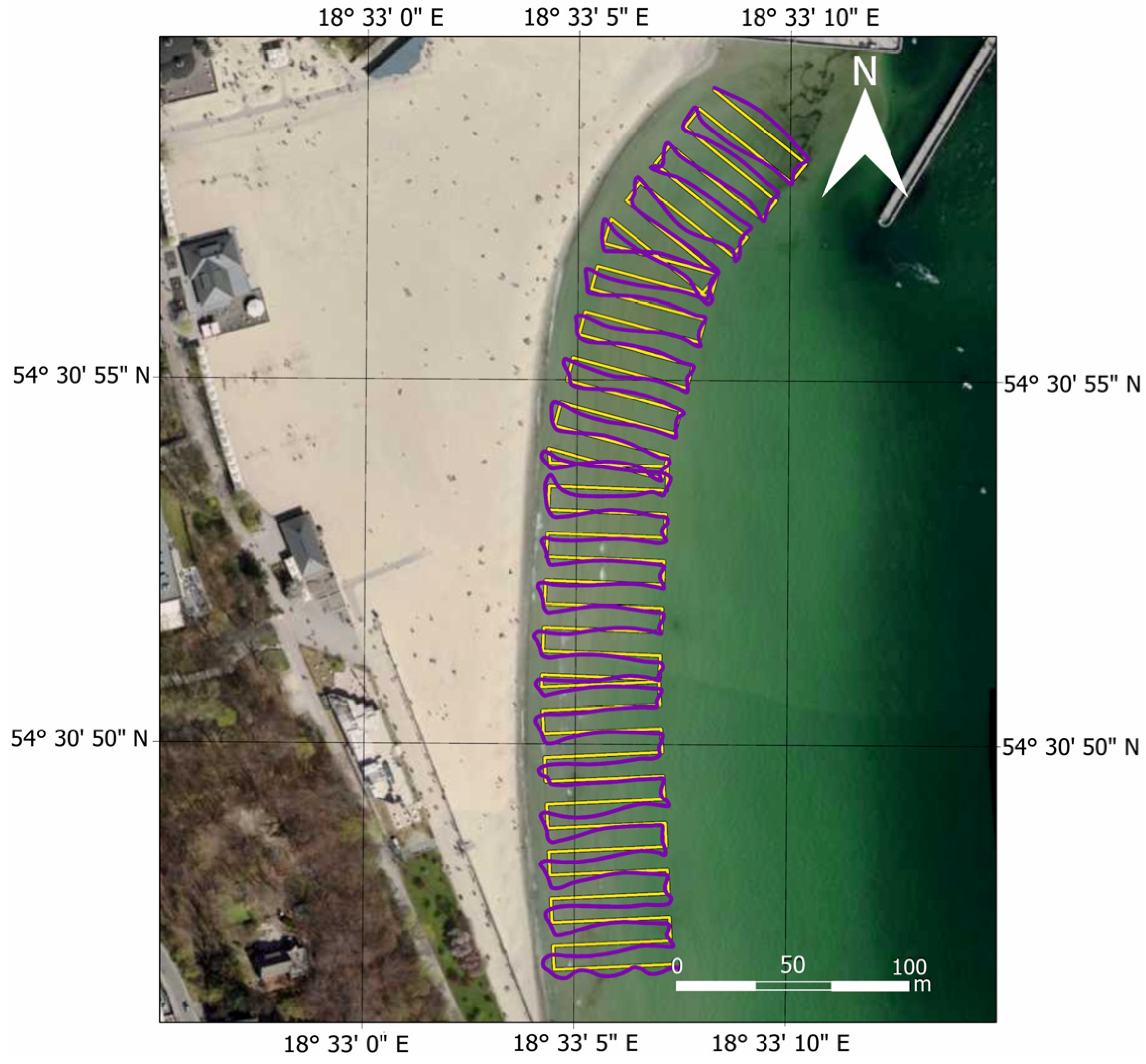
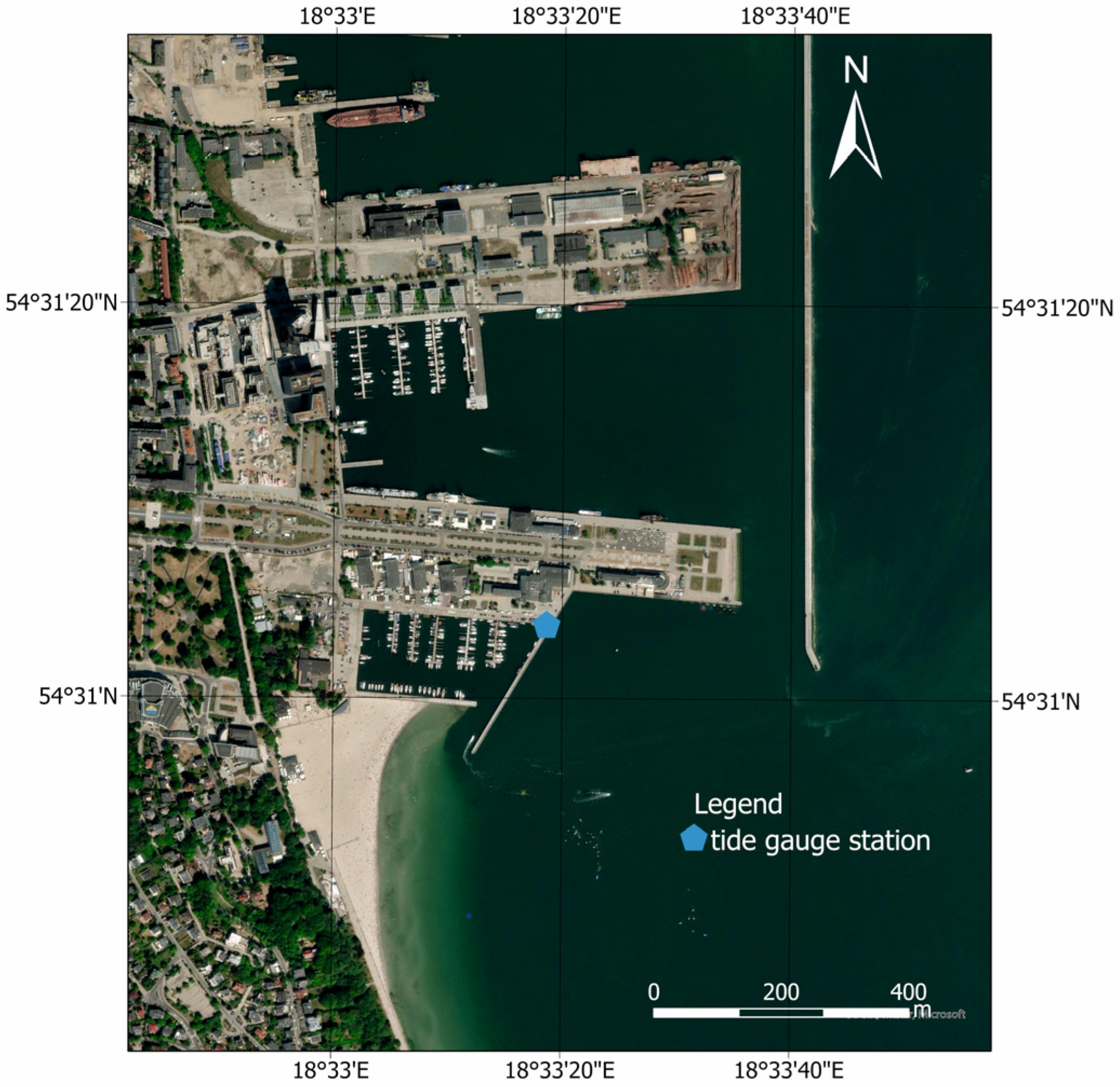
2.3. Bathymetric Data
- d’—normal height of the point measured by the echo sounder in the PL-EVRF2007-NH height system (cm);
- d—depth measured by the echo sounder (cm);
- ΔdET—draft of the echo sounder transducer (cm);
- ΔdCD—depth correction referring to the chart datum in the PL-EVRF2007-NH height system (cm), which must added be if the averaged water level () is less than 491.3 cm. Otherwise, the depth correction must be subtracted.
- —averaged sea level observed on the mareograph between consecutive full hours in the PL-EVRF2007-NH height system (cm).
2.4. Topo-Bathymetric Data Integration Models
- IDW is the simplest deterministic method, the basis of which is the direct statement that geographic objects located closer to each other are more similar than those located further away. The value at a given location is determined based on nearby points with known values, which are weighted by a factor proportional to the inverse of their distance [39,40];
- MSM, which is a generalisation of the inverse distance method. The algorithm uses two types of interpolation functions: faithful, in which the function parameter is consistent with the measured parameter, and smoothing, in which the input value is not precisely located on the generated surface [44,45,46];
- The kriging method is an interpolation method based on geostatistics, in which an interpolation error called a kriging variance is determined. The kriging algorithm is effective because it can compensate for the data in the set by giving those areas less weight in the overall prediction. It also allows for extrapolation beyond the data area [47,48];
- —the first quartile (25th empirical quartile) of the value (m);
- —the third quartile (75th empirical quartile) of the value (m).
- RMSE—Root Mean Square Error (m);
- n –number of measurement points (–);
- i—number representing successive measurement points (–);
- zi—height of the i-th point measured by the UAV or USV (m);
- —interpolated value of zi (m);
- MAE—Mean Absolute Error (m);
- R2—coefficient of determination (–);
- —arithmetic mean of z-value (m).
3. Results
3.1. Modelling the Land Surface of the Coastal Zone
3.1.1. IDP (p = 1)
3.1.2. IDP (p = 2)
3.1.3. MSM
3.1.4. NNI
3.1.5. Kriging (Logarithmic Model)
3.1.6. Kriging (Linear Model)
3.2. Modelling the Seabed Surface of the Coastal Zone
3.2.1. IDP (p = 1)
3.2.2. IDP (p = 2)
3.2.3. MSM
3.2.4. NNI
3.2.5. Kriging (Logarithmic Model)
3.2.6. Kriging (Linear Model)
4. Discussion
5. Conclusions
Funding
Conflicts of Interest
References
- Erena, M.; Atenza, J.F.; García-Galiano, S.; Domínguez, J.A.; Bernabé, J.M. Use of Drones for the Topo-bathymetric Monitoring of the Reservoirs of the Segura River Basin. Water 2019, 11, 445. [Google Scholar] [CrossRef]
- Lewicka, O. Analysis of Terrain Modelling Methods in the Coastal Zone. Commun. Sci. Lett. Univ. Zilina 2023, 25, E1–E14. [Google Scholar] [CrossRef]
- Stateczny, A. The Neural Method of Sea Bottom Shape Modelling for the Spatial Maritime Information System. In Maritime Engineering and Ports II.; Brebbia, C.A., Olivella, J., Eds.; WIT Press: Southampton, UK, 2000; Volume 51, pp. 251–259. [Google Scholar]
- CCOM. Bathymetric Globe. Available online: http://ccom.unh.edu/project/bathymetry-globe (accessed on 10 August 2023).
- Li, Z.; Zhai, J.; Wu, F. Shape Similarity Assessment Method for Coastline Generalization. ISPRS Int. J. Geo-Inf. 2018, 7, 283. [Google Scholar] [CrossRef]
- Yunus, A.P.; Dou, J.; Song, X.; Avtar, R. Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images. Sensors 2019, 19, 2788. [Google Scholar] [CrossRef] [PubMed]
- Mury, A.; Jeanson, M.; Collin, A.; James, D.; Etienne, S. High Resolution Shoreline and Shelly Ridge Monitoring over Stormy Winter Events: A Case Study in the Megatidal Bay of Mont-Saint-Michel (France). J. Mar. Sci. Eng. 2019, 7, 97. [Google Scholar] [CrossRef]
- Mahamud, U.; Takewaka, S. Shoreline Change around a River Delta on the Cox’s Bazar Coast of Bangladesh. J. Mar. Sci. Eng. 2018, 6, 80. [Google Scholar] [CrossRef]
- Fu, Y.; Guo, Q.; Wu, X.; Fang, H.; Pan, Y. Analysis and Prediction of Changes in Coastline Morphology in the Bohai Sea, China, Using Remote Sensing. Sustainability 2017, 9, 900. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.; Kyriou, A.; Koukouvelas, I.; Zygouri, V.; Apostolopoulos, D. Combination of Aerial, Satellite, and UAV Photogrammetry for Mapping the Diachronic Coastline Evolution: The Case of Lefkada Island. ISPRS Int. J. Geo-Inf. 2019, 8, 489. [Google Scholar] [CrossRef]
- Zhang, Y.; Hou, X. Characteristics of Coastline Changes on Southeast Asia Islands from 2000 to 2015. Remote Sens. 2020, 12, 519. [Google Scholar] [CrossRef]
- Kanwal, S.; Ding, X.; Sajjad, M.; Abbas, S. Three Decades of Coastal Changes in Sindh, Pakistan (1989–2018): A Geospatial Assessment. Remote Sens. 2020, 12, 8. [Google Scholar] [CrossRef]
- Paull, C.K.; Dallimore, S.R.; Jin, Y.K.; Caress, D.W.; Lundsten, E.; Gwiazda, R.; Anderson, K.; Clarke, J.H.; Youngblut, S.; Melling, H. Rapid Seafloor Changes Associated with the Degradation of Arctic Submarine Permafrost. Proc. Natl. Acad. Sci. USA 2022, 119, e2119105119. [Google Scholar] [CrossRef] [PubMed]
- Specht, M.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Makar, A. Geospatial Modeling of the Tombolo Phenomenon in Sopot Using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sens. 2020, 12, 737. [Google Scholar] [CrossRef]
- Wlodarczyk-Sielicka, M.; Stateczny, A. Clustering Bathymetric Data for Electronic Navigational Charts. J. Navig. 2016, 69, 1143–1153. [Google Scholar] [CrossRef]
- Lewicka, O.; Specht, M.; Stateczny, A.; Specht, C.; Brčić, D.; Jugović, A.; Widźgowski, S.; Wiśniewska, M. Analysis of GNSS, Hydroacoustic and Optoelectronic Data Integration Methods Used in Hydrography. Sensors 2021, 21, 7831. [Google Scholar] [CrossRef]
- Kang, M. Overview of the Applications of Hydroacoustic Methods in South Korea and Fish Abundance Estimation Methods. Fish. Aquat. Sci. 2014, 17, 369–376. [Google Scholar] [CrossRef]
- Makar, A. Determination of USV’s Direction Using Satellite and Fluxgate Compasses and GNSS-RTK. Sensors 2022, 22, 7895. [Google Scholar] [CrossRef]
- Makar, A. Method of Determination of Acoustic Wave Reflection Points in Geodesic Bathymetric Surveys. Annu. Navig. 2008, 14, 1–89. [Google Scholar]
- Parente, C.; Vallario, A. Interpolation of Single Beam Echo Sounder Data for 3D Bathymetric Model. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 6–13. [Google Scholar] [CrossRef]
- Specht, C.; Specht, M.; Dabrowski, P. Comparative Analysis of Active Geodetic Networks in Poland. In Proceedings of the 17th International Multidisciplinary Scientific GeoConference (SGEM 2017), Albena, Bulgaria, 27 June–6 July 2017. [Google Scholar]
- Wlodarczyk-Sielicka, M.; Stateczny, A. Comparison of Selected Reduction Methods of Bathymetric Data Obtained by Multibeam Echosounder. In Proceedings of the 2016 Baltic Geodetic Congress (BGC 2016), Gdańsk, Poland, 2–4 June 2016. [Google Scholar]
- Kondo, H.; Ura, T. Navigation of an AUV for Investigation of Underwater Structures. Control Eng. Pract. 2004, 12, 1551–1559. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Inertial Navigation System. In Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration; Springer: Berlin/Heidelberg, Germany, 2013; pp. 125–166. [Google Scholar]
- Specht, M. Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders. Sensors 2019, 19, 3860. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Wąż, M.; Dąbrowski, P.; Skóra, M.; Marchel, Ł. Determining the Variability of the Territorial Sea Baseline on the Example of Waterbody Adjacent to the Municipal Beach in Gdynia. Appl. Sci. 2019, 9, 3867. [Google Scholar] [CrossRef]
- Stateczny, A. Radar Water Level Sensors for Full Implementation of the River Information Services of Border and Lower Section of the Oder in Poland. In Proceedings of the 17th International Radar Symposium (IRS 2016), Kraków, Poland, 10–12 May 2016. [Google Scholar]
- Wehr, A.; Lohr, U. Airborne Laser Scanning—An Introduction and Overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar]
- Ibrahim, P.O.; Sternberg, H.; Samaila-Ija, H.A.; Adgidzi, D.; Nwadialor, I.J. Modelling Topo-bathymetric Surface Using a Triangulation Irregular Network (TIN) of Tunga Dam in Nigeria. Appl. Geomat. 2023, 15, 281–293. [Google Scholar] [CrossRef]
- Lubczonek, J.; Kazimierski, W.; Zaniewicz, G.; Lacka, M. Methodology for Combining Data Acquired by Unmanned Surface and Aerial Vehicles to Create Digital Bathymetric Models in Shallow and Ultra-shallow Waters. Remote Sens. 2022, 14, 105. [Google Scholar] [CrossRef]
- Wang, D.; Xing, S.; He, Y.; Yu, J.; Xu, Q.; Li, P. Evaluation of a New Lightweight UAV-borne Topo-bathymetric LiDAR for Shallow Water Bathymetry and Object Detection. Sensors 2022, 22, 1379. [Google Scholar] [CrossRef]
- Maritime Office in Gdynia. Draft Plan for the Spatial Development of Water of the Sea Port in Gdynia, Preliminary Draft Plan Version (v.0). Available online: https://www.umgdy.gov.pl/wp-content/uploads/2020/11/PZP.GDY_3_prognoza_v0.pdf (accessed on 10 August 2023). (In Polish)
- Maritime Office in Gdynia. Draft Plan for the Spatial Development of Internal Waters of the Gulf of Gdańsk Together with an Environmental Impact Forecast. Available online: https://www.umgdy.gov.pl/wp-content/uploads/2020/10/pzp-zgd-v0-2_projekt_planu_prognoza_prezent.pdf (accessed on 10 August 2023). (In Polish)
- Burdziakowski, P.; Specht, C.; Dabrowski, P.S.; Specht, M.; Lewicka, O.; Makar, A. Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project. Sensors 2020, 20, 4000. [Google Scholar] [CrossRef]
- Specht, M.; Szostak, B.; Lewicka, O.; Stateczny, A.; Specht, C. Method for Determining of Shallow Water Depths Based on Data Recorded by UAV/USV Vehicles and Processed Using the SVR Algorithm. Measurement 2023, 221, 113437. [Google Scholar] [CrossRef]
- Specht, C.; Lewicka, O.; Specht, M.; Dąbrowski, P.; Burdziakowski, P. Methodology for Carrying out Measurements of the Tombolo Geomorphic Landform Using Unmanned Aerial and Surface Vehicles near Sopot Pier, Poland. J. Mar. Sci. Eng. 2020, 8, 384. [Google Scholar] [CrossRef]
- van Kreveld, M. Digital Elevation Models and TIN Algorithms. In Algorithmic Foundations of Geographic Information Systems; van Kreveld, M., Nievergelt, J., Roos, T., Widmayer, P., Eds.; Springer Berlin, Heidelberg: Berlin/Heidelberg, Germany, 1997; Volume 1340, pp. 37–78. [Google Scholar]
- Gil, M.; Frąckiewicz, P.; Pukanska, K.; Blistan, P. Statistical and Geostatic Methods of Testing Surface Deformations. In Modern Measurement Systems in Geomatics and Environmental Engineering; Wolski, B., Ed.; Kielce University of Technology Publishing House: Kielce, Poland, 2018; pp. 20–32. (In Polish) [Google Scholar]
- Lu, G.Y.; Wong, D.W. An Adaptive Inverse-Distance Weighting Spatial Interpolation Technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Makar, A.; Specht, C.; Specht, M.; Dąbrowski, P.; Burdziakowski, P.; Lewicka, O. Seabed Topography Changes in the Sopot Pier Zone in 2010–2018 Influenced by Tombolo Phenomenon. Sensors 2020, 20, 6061. [Google Scholar] [CrossRef]
- Bartier, P.M.; Keller, C.P. Multivariate Interpolation to Incorporate Thematic Surface Data Using Inverse Distance Weighting (IDW). Comput. Geosci. 1996, 22, 795–799. [Google Scholar] [CrossRef]
- Davis, J.C. Statistics and Data Analysis in Geology, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2002. [Google Scholar]
- Ohlert, P.L.; Bach, M.; Breuer, L. Accuracy Assessment of Inverse Distance Weighting Interpolation of Groundwater Nitrate Concentrations in Bavaria (Germany). Environ. Sci. Pollut. Res. 2022, 30, 9445–9455. [Google Scholar] [CrossRef] [PubMed]
- Basso, K.; De Avila Zingano, P.R.; Dal Sasso Freitas, C.M. Interpolation of Scattered Data: Investigating Alternatives for the Modified Shepard Method. In Proceedings of the XII Brazilian Symposium on Computer Graphics and Image Processing, Campinas, Brazil, 17–20 October 1999. [Google Scholar]
- Malvić, T.; Ivšinović, J.; Velić, J.; Sremac, J.; Barudžija, U. Application of the Modified Shepard’s Method (MSM): A Case Study with the Interpolation of Neogene Reservoir Variables in Northern Croatia. Stats 2020, 3, 68–83. [Google Scholar] [CrossRef]
- Renka, R.J. Multivariate Interpolation of Large Sets of Scattered Data. ACM Trans. Math. Softw. 1988, 14, 139–148. [Google Scholar] [CrossRef]
- Fanchi, J.R. Chapter 2—Geological Modeling. In Principles of Applied Reservoir Simulation, 4th ed.; Fanchi, J.R., Ed.; Gulf Professional Publishing: Houston, TX, USA, 2018; pp. 9–33. [Google Scholar]
- Journel, A.G.; Huijbregts, C.J. Mining Geostatistics; Academic Press: Cambridge, MA, USA, 1978. [Google Scholar]
- Cueto, E.; Sukumar, N.; Calvo, B.; Martínez, M.A.; Cegoñino, J.; Doblaré, M. Overview and Recent Advances in Natural Neighbour Galerkin Methods. Arch. Comput. Methods Eng. 2003, 10, 307–384. [Google Scholar] [CrossRef]
- Sibson, R. A Brief Description of Natural Neighbor Interpolation. In Interpreting Multivariate Data; Barnett, V., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1981; pp. 21–36. [Google Scholar]
- Di Bucchianico, A. Coefficient of Determination (R2). In Encyclopedia of Statistics in Quality and Reliability; Ruggeri, F., Kenett, R.S., Faltin, F.W., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; Volume 1. [Google Scholar]
- Pham, H. A New Criterion for Model Selection. Mathematics 2019, 7, 1215. [Google Scholar] [CrossRef]
- Willmott, C.J.; Matsuura, K. Advantages of the Mean Absolute Error (MAE) over the Root Mean Square Error (RMSE) in Assessing Average Model Performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Specht, M. Determination of Navigation System Positioning Accuracy Using the Reliability Method Based on Real Measurements. Remote Sens. 2021, 13, 4424. [Google Scholar] [CrossRef]
- Specht, M. Statistical Distribution Analysis of Navigation Positioning System Errors—Issue of the Empirical Sample Size. Sensors 2020, 20, 7144. [Google Scholar] [CrossRef]
- Lewicka, O. Method for Accuracy Assessment of Topo-bathymetric Surface Models Based on Geospatial Data Recorded by UAV and USV Vehicles. Metrol. Meas. Syst 2023, 30, 1–19. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Easting (m) | Northing (m) | HPL-EVRF2007-NH (m) | dE 1 (m) | dN 2 (m) | dHn 3 (m) |
|---|---|---|---|---|---|---|
| 1 | 4,341,518.944 | 6,043,718.866 | 0.607 | 0.007 | −0.009 | −0.009 |
| 2 | 4,341,482.962 | 6,043,652.071 | 0.789 | 0.009 | 0.008 | 0.004 |
| 3 | 4,341,473.488 | 6,043,610.972 | 0.875 | −0.017 | −0.003 | −0.015 |
| 4 | 4,341,467.661 | 6,043,567.572 | 0.908 | 0.002 | 0.001 | 0.007 |
| 5 | 4,341,462.424 | 6,043,509.593 | 0.990 | −0.006 | 0.000 | −0.009 |
| 6 | 4,341,461.894 | 6,04,3452.436 | 0.932 | 0.022 | 0.010 | 0.024 |
| σ | 0.012 | 0.006 | 0.013 |
| Statistical Measure (m) | IDP (p = 1) | IDP (p = 2) | MSM | NNI | Kriging (Logarithmic Model) | Kriging (Linear Model) |
|---|---|---|---|---|---|---|
| hmax 1 | 2.690 | 3.102 | 3.856 | 3.418 | 3.857 | 3.902 |
| hmin 2 | 0.000 | 0.000 | 0.001 | 0.000 | 0.000 | 0.000 |
| RMS | 1.527 | 1.522 | 1.668 | 1.140 | 1.746 | 1.581 |
| R | 2.690 | 3.102 | 3.856 | 3.418 | 3.857 | 3.902 |
| IRQ | 0.828 | 0.851 | 0.872 | 0.781 | 0.971 | 0.798 |
| Statistical Measure (m) | IDP (p = 1) | IDP (p = 2) | MSM | NNI | Kriging (Logarithmic Model) | Kriging (Linear Model) |
|---|---|---|---|---|---|---|
| hmax 1 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| hmin 2 | –1.332 | –1.346 | –1.370 | –1.365 | –1.370 | –1.445 |
| RMS | 0.920 | 0.923 | 1.403 | 0.799 | 0.931 | 0.949 |
| R | 1.332 | 1.346 | 1.370 | 1.365 | 1.370 | 1.445 |
| IRQ | 0.661 | 0.613 | 0.819 | 0.591 | 0.612 | 0.693 |
| Statistical Measure (m) | IDP (p = 1) | IDP (p = 2) | MSM | NNI | Kriging (Logarithmic Model) | Kriging (Linear Model) |
|---|---|---|---|---|---|---|
| RMSE (m) | 0.061 | 0.042 | 0.100 | 0.032 | 0.263 | 0.008 |
| MAE (m) | 0.023 | 0.016 | 0.016 | 0.011 | 0.076 | 0.000 |
| R2 (–) | 0.992 | 0.996 | 0.981 | 0.998 | 0.176 | 0.996 |
| R68 (m) | 0.019 | 0.013 | 0.002 | 0.009 | 0.262 | 0.008 |
| R95 (m) | 0.072 | 0.048 | 0.030 | 0.032 | 1.278 | 0.032 |
| Statistical Measure (m) | IDP (p = 1) | IDP (p = 2) | MSM | NNI | Kriging (Logarithmic Model) | Kriging (Linear Model) |
|---|---|---|---|---|---|---|
| RMSE (m) | 0.034 | 0.019 | 0.123 | 0.020 | 0.808 | 0.018 |
| MAE (m) | 0.025 | 0.013 | 0.061 | 0.002 | 0.447 | 0.000 |
| R2 (–) | 0.995 | 0.998 | 0.931 | 0.998 | 0.410 | 0.998 |
| R68 (m) | 0.028 | 0.015 | 0.047 | 0.014 | 0.338 | 0.012 |
| R95 (m) | 0.070 | 0.038 | 0.262 | 0.039 | 2.073 | 0.034 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, O. Land and Seabed Surface Modelling in the Coastal Zone Using UAV/USV-Based Data Integration. Sensors 2023, 23, 8020. https://doi.org/10.3390/s23198020
Specht O. Land and Seabed Surface Modelling in the Coastal Zone Using UAV/USV-Based Data Integration. Sensors. 2023; 23(19):8020. https://doi.org/10.3390/s23198020
Chicago/Turabian StyleSpecht, Oktawia. 2023. "Land and Seabed Surface Modelling in the Coastal Zone Using UAV/USV-Based Data Integration" Sensors 23, no. 19: 8020. https://doi.org/10.3390/s23198020
APA StyleSpecht, O. (2023). Land and Seabed Surface Modelling in the Coastal Zone Using UAV/USV-Based Data Integration. Sensors, 23(19), 8020. https://doi.org/10.3390/s23198020