
A Feasibility Study on Extension of Measurement Distance in Vision Sensor Using Super-Resolution for Dynamic Response Measurement


Abstract
:1. Introduction
2. Methodology of Dynamic Displacement Measurement Using Single Image Super-Resolution
2.1. Feature Point-Based Measurement System
2.2. Indoor Experimental Conditions for Dynamic Displacement Measurements
2.3. Single Image Super-Resolution in Vision Sensor-Based Measurement System
3. Result and Discussion
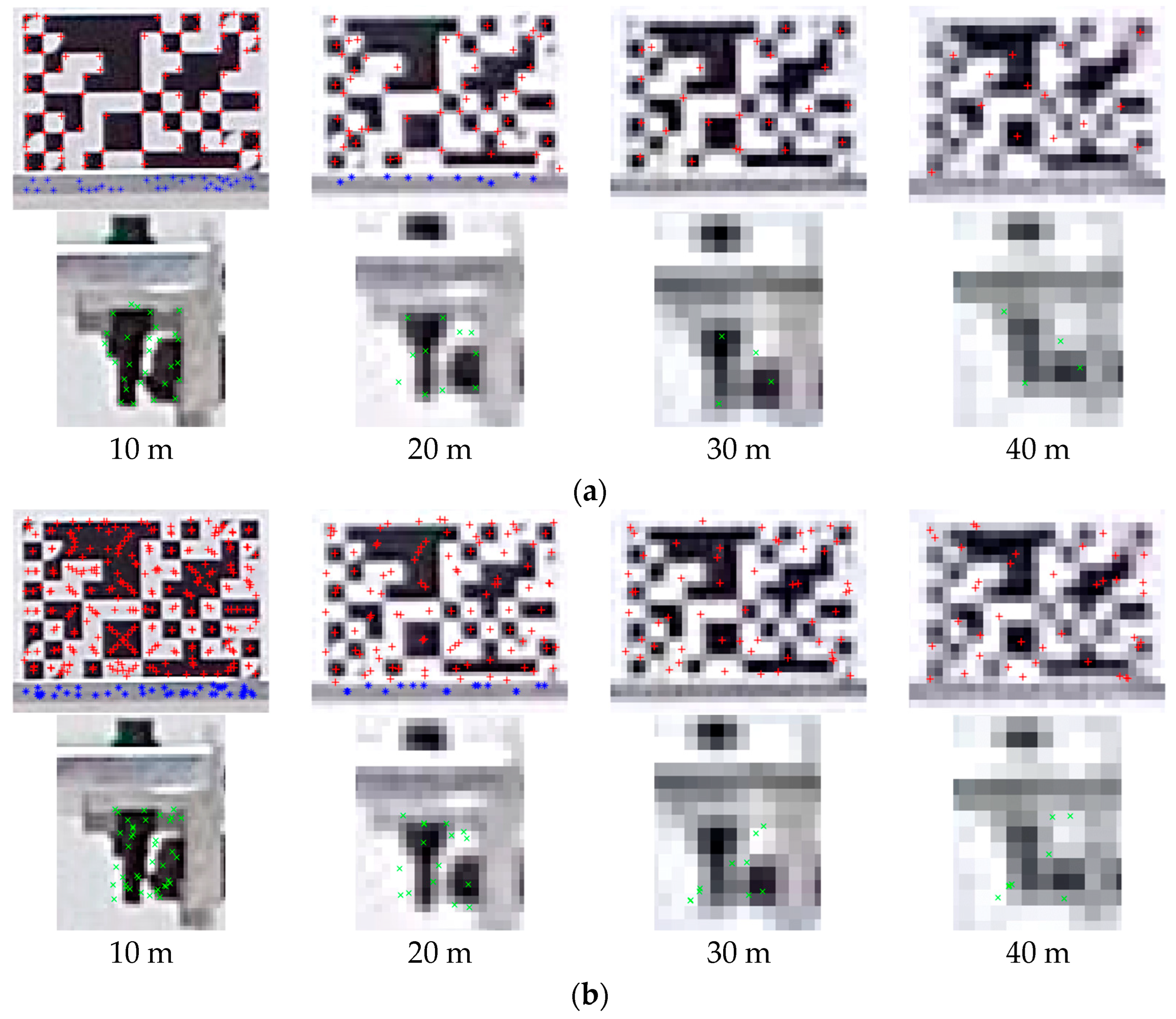
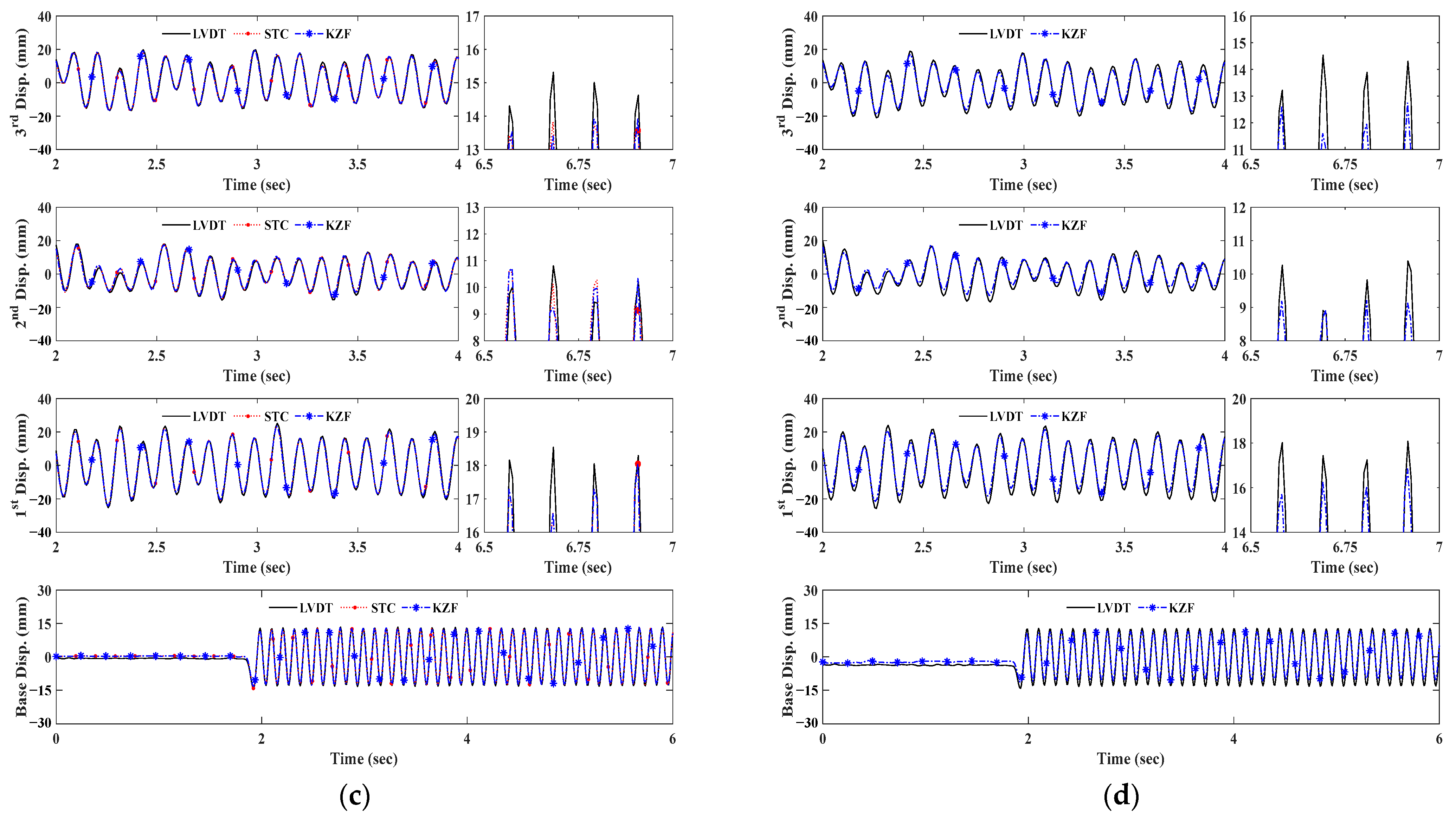
3.1. Displacement Measurement Performance of Feature Point-Based Measurement System
3.2. Feasibility Study of Super-Resolution in Vision Sensor-Based Measurement System
3.3. Alleviation of Low Spatial Resolution Using Super-Resolution
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ASCE 2021 Report Card for America’s Infrastructures; ASCE: Reston, VA, USA, 2021.
- ICE State of the Nation: Infrastructure 2014; ICE: London, UK, 2014.
- Fukuda, Y.; Feng, M.Q.; Narita, Y.; Kaneko, S.; Tanaka, T. Vision-Based Displacement Sensor for Monitoring Dynamic Response Using Robust Object Search Algorithm. IEEE Sens. J. 2013, 13, 4725–4732. [Google Scholar] [CrossRef]
- Fukuda, Y.; Feng, M.Q.; Shinozuka, M. Cost-Effective Vision-Based System for Monitoring Dynamic Response of Civil Engineering Structures. Struct. Control Health Monit. 2010, 17, 918–936. [Google Scholar] [CrossRef]
- Yoon, H.; Elanwar, H.; Choi, H.; Golparvar-Fard, M.; Spencer, B.F., Jr. Target-Free Approach for Vision-Based Structural System Identification Using Consumer-Grade Cameras. Struct. Control Health Monit. 2016, 23, 1405–1416. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 5, 199–222. [Google Scholar] [CrossRef]
- Kim, S.-W.; Jeon, B.-G.; Kim, N.-S.; Park, J.-C. Vision-Based Monitoring System for Evaluating Cable Tensile Forces on a Cable-Stayed Bridge. Struct. Health Monit. 2013, 12, 440–456. [Google Scholar] [CrossRef]
- Celik, O.; Dong, C.-Z.; Catbas, F.N. A Computer Vision Approach for the Load Time History Estimation of Lively Individuals and Crowds. Comput. Struct. 2018, 200, 32–52. [Google Scholar] [CrossRef]
- Cha, Y.-J.; Chen, J.G.; Büyüköztürk, O. Output-Only Computer Vision Based Damage Detection Using Phase-Based Optical Flow and Unscented Kalman Filters. Eng. Struct. 2017, 132, 300–313. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Model Updating of Railway Bridge Using in Situ Dynamic Displacement Measurement under Trainloads. J. Bridge Eng. 2015, 20, 4015019. [Google Scholar] [CrossRef]
- Poozesh, P.; Sarrafi, A.; Mao, Z.; Niezrecki, C. Modal Parameter Estimation from Optically-Measured Data Using a Hybrid Output-Only System Identification Method. Measurement 2017, 110, 134–145. [Google Scholar] [CrossRef]
- Lee, J.J.; Shinozuka, M. A Vision-Based System for Remote Sensing of Bridge Displacement. Ndt E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Feng, M.Q.; Fukuda, Y.; Feng, D.; Mizuta, M. Nontarget Vision Sensor for Remote Measurement of Bridge Dynamic Response. J. Bridge Eng. 2015, 20, 4015023. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.M.W. Review of Machine-Vision Based Methodologies for Displacement Measurement in Civil Structures. J. Civ. Struct. Health Monit. 2018, 8, 91–110. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q.; Ozer, E.; Fukuda, Y. A Vision-Based Sensor for Noncontact Structural Displacement Measurement. Sensors 2015, 15, 16557–16575. [Google Scholar] [CrossRef] [PubMed]
- Bock, Y.; Melgar, D.; Crowell, B.W. Real-Time Strong-Motion Broadband Displacements from Collocated GPS and Accelerometers. Bull. Seismol. Soc. Am. 2011, 101, 2904–2925. [Google Scholar] [CrossRef]
- Kohut, P.; Holak, K.; Uhl, T.; Ortyl, Ł.; Owerko, T.; Kuras, P.; Kocierz, R. Monitoring of a Civil Structure’s State Based on Noncontact Measurements. Struct. Health Monit. 2013, 12, 411–429. [Google Scholar] [CrossRef]
- Nassif, H.H.; Gindy, M.; Davis, J. Comparison of Laser Doppler Vibrometer with Contact Sensors for Monitoring Bridge Deflection and Vibration. Ndt E Int. 2005, 38, 213–218. [Google Scholar] [CrossRef]
- Wu, T.; Tang, L.; Shao, S.; Zhang, X.-Y.; Liu, Y.-J.; Zhou, Z.-X. Cost-Effective, Vision-Based Multi-Target Tracking Approach for Structural Health Monitoring. Meas. Sci. Technol. 2021, 32, 125116. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. An Interferometric Radar for Non-Contact Measurement of Deflections on Civil Engineering Structures: Laboratory and Full-Scale Tests. Struct. Infrastruct. Eng. 2010, 6, 521–534. [Google Scholar] [CrossRef]
- Bhowmick, S.; Nagarajaiah, S.; Lai, Z. Measurement of Full-Field Displacement Time History of a Vibrating Continuous Edge from Video. Mech. Syst. Signal Process 2020, 144, 106847. [Google Scholar] [CrossRef]
- Sładek, J.; Ostrowska, K.; Kohut, P.; Holak, K.; Gaska, A.; Uhl, T. Development of a Vision Based Deflection Measurement System and Its Accuracy Assessment. Measurement 2013, 46, 1237–1249. [Google Scholar] [CrossRef]
- Luo, L.; Feng, M.Q.; Wu, J. A Comprehensive Alleviation Technique for Optical-Turbulence-Induced Errors in Vision-Based Displacement Measurement. Struct. Control Health Monit. 2020, 27, e2496. [Google Scholar] [CrossRef]
- Han, Y.; Wu, G.; Feng, D. Vision-Based Displacement Measurement Using an Unmanned Aerial Vehicle. Struct. Control Health Monit. 2022, 29, e3025. [Google Scholar] [CrossRef]
- Chen, H.; He, X.; Qing, L.; Wu, Y.; Ren, C.; Sheriff, R.E.; Zhu, C. Real-World Single Image Super-Resolution: A Brief Review. Inf. Fusion. 2022, 79, 124–145. [Google Scholar] [CrossRef]
- Lei, S.; Shi, Z.; Wu, X.; Pan, B.; Xu, X.; Hao, H. Simultaneous Super-Resolution and Segmentation for Remote Sensing Images. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 3121–3124. [Google Scholar]
- Wang, L.; Li, D.; Zhu, Y.; Tian, L.; Shan, Y. Dual Super-Resolution Learning for Semantic Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 3774–3783. [Google Scholar]
- Zhang, Y.; Bai, Y.; Ding, M.; Xu, S.; Ghanem, B. KGSnet: Key-Point-Guided Super-Resolution Network for Pedestrian Detection in the Wild. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 2251–2265. [Google Scholar] [CrossRef] [PubMed]
- Pang, Y.; Cao, J.; Wang, J.; Han, J. JCS-Net: Joint Classification and Super-Resolution Network for Small-Scale Pedestrian Detection in Surveillance Images. IEEE Trans. Inf. Forensics Secur. 2019, 14, 3322–3331. [Google Scholar] [CrossRef]
- Li, J.; Wang, J.; Chen, X.; Luo, Z.; Song, Z. Multiple Task-Driven Face Detection Based on Super-Resolution Pyramid Network. J. Internet Technol. 2019, 20, 1263–1272. [Google Scholar]
- Yang, X.; Wu, W.; Liu, K.; Kim, P.W.; Sangaiah, A.K.; Jeon, G. Long-Distance Object Recognition with Image Super Resolution: A Comparative Study. IEEE Access 2018, 6, 13429–13438. [Google Scholar] [CrossRef]
- Wang, Z.; Chang, S.; Yang, Y.; Liu, D.; Huang, T.S. Studying Very Low Resolution Recognition Using Deep Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4792–4800. [Google Scholar]
- Trucco, E.; Verri, A. Introductory Techniques for 3-D Computer Vision; Prentice Hall: Englewood Cliffs, NJ, USA, 1998; Volume 201. [Google Scholar]
- Shi, J.; Tomasi, C. Good Features to Track. In Proceedings of the 1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE Features. In Proceedings of the Computer Vision—ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Proceedings, Part VI 12. pp. 214–227. [Google Scholar]
- Tomasi, C.; Kanade, T. Detection and Tracking of Point. Int. J. Comput. Vis. 1991, 9, 137–154. [Google Scholar] [CrossRef]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. In Proceedings of the IJCAI’81: 7th International Joint Conference on Artificial Intelligence, Vancouver, BC, Canada, 24–28 August 1981; Volume 2, pp. 674–679. [Google Scholar]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Forward-Backward Error: Automatic Detection of Tracking Failures. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 2756–2759. [Google Scholar]
- Torr, P.H.S.; Zisserman, A. MLESAC: A New Robust Estimator with Application to Estimating Image Geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Badali, A.P.; Zhang, Y.; Carr, P.; Thomas, P.J.; Hornsey, R.I. Scale Factor in Digital Cameras. In Proceedings of the Photonic Applications in Biosensing and Imaging, Toronto, ON, Canada, 12–14 September 2005; Volume 5969, pp. 556–565. [Google Scholar]
- Casciati, F.; Wu, L. Local Positioning Accuracy of Laser Sensors for Structural Health Monitoring. Struct. Control Health Monit. 2013, 20, 728–739. [Google Scholar] [CrossRef]
- Wu, L.-J.; Casciati, F.; Casciati, S. Dynamic Testing of a Laboratory Model via Vision-Based Sensing. Eng. Struct. 2014, 60, 113–125. [Google Scholar] [CrossRef]
- Zhang, Z. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Hu, X.; Mu, H.; Zhang, X.; Wang, Z.; Tan, T.; Sun, J. Meta-SR: A Magnification-Arbitrary Network for Super-Resolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1575–1584. [Google Scholar]
- He, X.; Mo, Z.; Wang, P.; Liu, Y.; Yang, M.; Cheng, J. Ode-Inspired Network Design for Single Image Super-Resolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1732–1741. [Google Scholar]
- Lim, B.; Son, S.; Kim, H.; Nah, S.; Mu Lee, K. Enhanced Deep Residual Networks for Single Image Super-Resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 136–144. [Google Scholar]
- Qiu, Y.; Wang, R.; Tao, D.; Cheng, J. Embedded Block Residual Network: A Recursive Restoration Model for Single-Image Super-Resolution. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 4180–4189. [Google Scholar]
- Ji, X.; Cao, Y.; Tai, Y.; Wang, C.; Li, J.; Huang, F. Real-World Super-Resolution via Kernel Estimation and Noise Injection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 13–19 June 2020; pp. 466–467. [Google Scholar]
- Shocher, A.; Cohen, N.; Irani, M. “Zero-Shot” Super-Resolution Using Deep Internal Learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 3118–3126. [Google Scholar]
- Ledig, C.; Theis, L.; Huszár, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Aitken, A.; Tejani, A.; Totz, J.; Wang, Z.; et al. Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4681–4690. [Google Scholar]
- Wang, X.; Yu, K.; Wu, S.; Gu, J.; Liu, Y.; Dong, C.; Qiao, Y.; Change Loy, C. Esrgan: Enhanced Super-Resolution Generative Adversarial Networks. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Zhang, W.; Liu, Y.; Dong, C.; Qiao, Y. Ranksrgan: Generative Adversarial Networks with Ranker for Image Super-Resolution. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 3096–3105. [Google Scholar]
- Zhang, R.; Isola, P.; Efros, A.A.; Shechtman, E.; Wang, O. The Unreasonable Effectiveness of Deep Features as a Perceptual Metric. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 586–595. [Google Scholar]
- Kromanis, R.; Forbes, C.; Borah, S. Super-Resolution Images for Measuring Structural Response. In Proceedings of the SMAR 2019-Fifth Conference on Smart Monitoring, Assessment and Rehabilitation of Civil Structures, Potsdam, Germany, 27–29 August 2019; pp. 1–8. [Google Scholar]
- Sun, C.; Gu, D.; Zhang, Y.; Lu, X. Vision-Based Displacement Measurement Enhanced by Super-Resolution Using Generative Adversarial Networks. Struct. Control Health Monit. 2022, 29, e3048. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Type | Target Type | Measurement Distance (m) | |||
|---|---|---|---|---|---|
| 10 | 20 | 30 | 40 | ||
| Corner points (no.) | A 1 | 90 | 82 | 41 | 29 |
| B 2 | 25 | 9 | 4 | 2 | |
| S 3 | 46 | 9 | - | - | |
| KAZE features (no.) | A | 288 | 100 | 54 | 34 |
| B | 36 | 16 | 10 | 5 | |
| S | 55 | 16 | - | - | |
| Disp. Measurement | Error | Target Type | Measurement Distance (m) | |||
|---|---|---|---|---|---|---|
| 10 | 20 | 30 | 40 | |||
| STC | RMSE (mm) | A 1 | 0.62 | 0.67 | 0.70 | 0.75 |
| B 2 | 0.65 | 0.69 | 0.79 | - | ||
| S 3 | 0.66 | 0.67 | - | - | ||
| MAPE (%) | A | 1.38 | 1.45 | 1.52 | 1.58 | |
| B | 1.74 | 1.85 | −4.30 | - | ||
| S | 1.55 | 1.57 | - | - | ||
| KZF | RMSE (mm) | A | 0.61 | 0.63 | 0.66 | 0.74 |
| B | 0.63 | 0.65 | 0.76 | 1.20 | ||
| S | 0.66 | 0.68 | - | - | ||
| MAPE (%) | A | 1.40 | 1.43 | 1.50 | 1.56 | |
| B | 1.72 | 1.81 | −4.19 | −10.22 | ||
| S | 1.56 | 1.59 | - | - | ||
| Measurement Dist. (m) | PSNR (dB) ↑ | SSIM ↑ | LPIPS ↓ | |||
|---|---|---|---|---|---|---|
| BC 1 | RSR 2 | BC | RSR | BC | RSR | |
| 10 | 32.11 | 32.34 | 0.91 | 0.90 | 0.29 | 0.21 |
| 20 | 35.85 | 32.92 | 0.95 | 0.87 | 0.22 | 0.22 |
| Disp. Measurement | Error | Target Type | Measurement Distance (m) | |||||
|---|---|---|---|---|---|---|---|---|
| 10 | 20 | |||||||
| Org. | BC 4 | RSR 5 | Org. | BC | RSR | |||
| STC | RMSE (mm) | A 1 | 0.62 | 0.72 | 0.70 | 0.67 | 0.68 | 0.64 |
| B 2 | 0.65 | 0.76 | 0.73 | 0.69 | 0.72 | 0.68 | ||
| S 3 | 0.66 | 0.74 | 0.70 | 0.67 | 0.70 | 0.65 | ||
| MAPE (%) | A | 1.38 | 1.59 | 1.43 | 1.45 | 1.53 | 1.37 | |
| B | 1.74 | 1.84 | 1.68 | 1.85 | 1.95 | 1.80 | ||
| S | 1.55 | 1.79 | 1.63 | 1.57 | 1.77 | 1.61 | ||
| KZF | RMSE (mm) | A | 0.61 | 0.69 | 0.69 | 0.63 | 0.59 | 0.59 |
| B | 0.63 | 0.69 | 0.70 | 0.65 | 0.59 | 0.59 | ||
| S | 0.66 | 0.70 | 0.71 | 0.68 | 0.60 | 0.60 | ||
| MAPE (%) | A | 1.43 | 1.61 | 1.44 | 1.43 | 1.63 | 1.47 | |
| B | 1.72 | 1.87 | 1.71 | 1.81 | 1.99 | 1.84 | ||
| S | 1.55 | 1.78 | 1.62 | 1.59 | 1.66 | 1.50 | ||
| Disp. Measurement | Error | Target Type | Measurement Distance (m) | |||
|---|---|---|---|---|---|---|
| 30 | 40 | |||||
| Org. | RSR 4 | Org. | RSR | |||
| STC | RMSE (mm) | A 1 | 0.70 | 0.67 | 0.75 | 0.72 |
| B 2 | 0.79 | 0.70 | - | 0.77 | ||
| S 3 | - | 0.68 | - | 0.85 | ||
| MAPE (%) | A | 1.52 | 1.44 | 1.58 | 1.54 | |
| B | −4.30 | 1.96 | - | −5.10 | ||
| S | - | 1.74 | - | −6.80 | ||
| KZF | RMSE (mm) | A | 0.66 | 0.65 | 0.74 | 0.68 |
| B | 0.76 | 0.65 | 1.20 | 0.87 | ||
| S | - | 0.63 | - | 0.76 | ||
| MAPE (%) | A | 1.50 | 1.42 | 1.56 | 1.45 | |
| B | −4.19 | 1.80 | −10.22 | −4.84 | ||
| S | - | 1.58 | - | 1.61 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, D.; Gong, J. A Feasibility Study on Extension of Measurement Distance in Vision Sensor Using Super-Resolution for Dynamic Response Measurement. Sensors 2023, 23, 8496. https://doi.org/10.3390/s23208496
Cho D, Gong J. A Feasibility Study on Extension of Measurement Distance in Vision Sensor Using Super-Resolution for Dynamic Response Measurement. Sensors. 2023; 23(20):8496. https://doi.org/10.3390/s23208496
Chicago/Turabian StyleCho, Dooyong, and Junho Gong. 2023. "A Feasibility Study on Extension of Measurement Distance in Vision Sensor Using Super-Resolution for Dynamic Response Measurement" Sensors 23, no. 20: 8496. https://doi.org/10.3390/s23208496
APA StyleCho, D., & Gong, J. (2023). A Feasibility Study on Extension of Measurement Distance in Vision Sensor Using Super-Resolution for Dynamic Response Measurement. Sensors, 23(20), 8496. https://doi.org/10.3390/s23208496