

Gas Adsorption Response of Piezoelectrically Driven Microcantilever Beam Gas Sensors: Analytical, Numerical, and Experimental Characterizations

 ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Analytical Approach
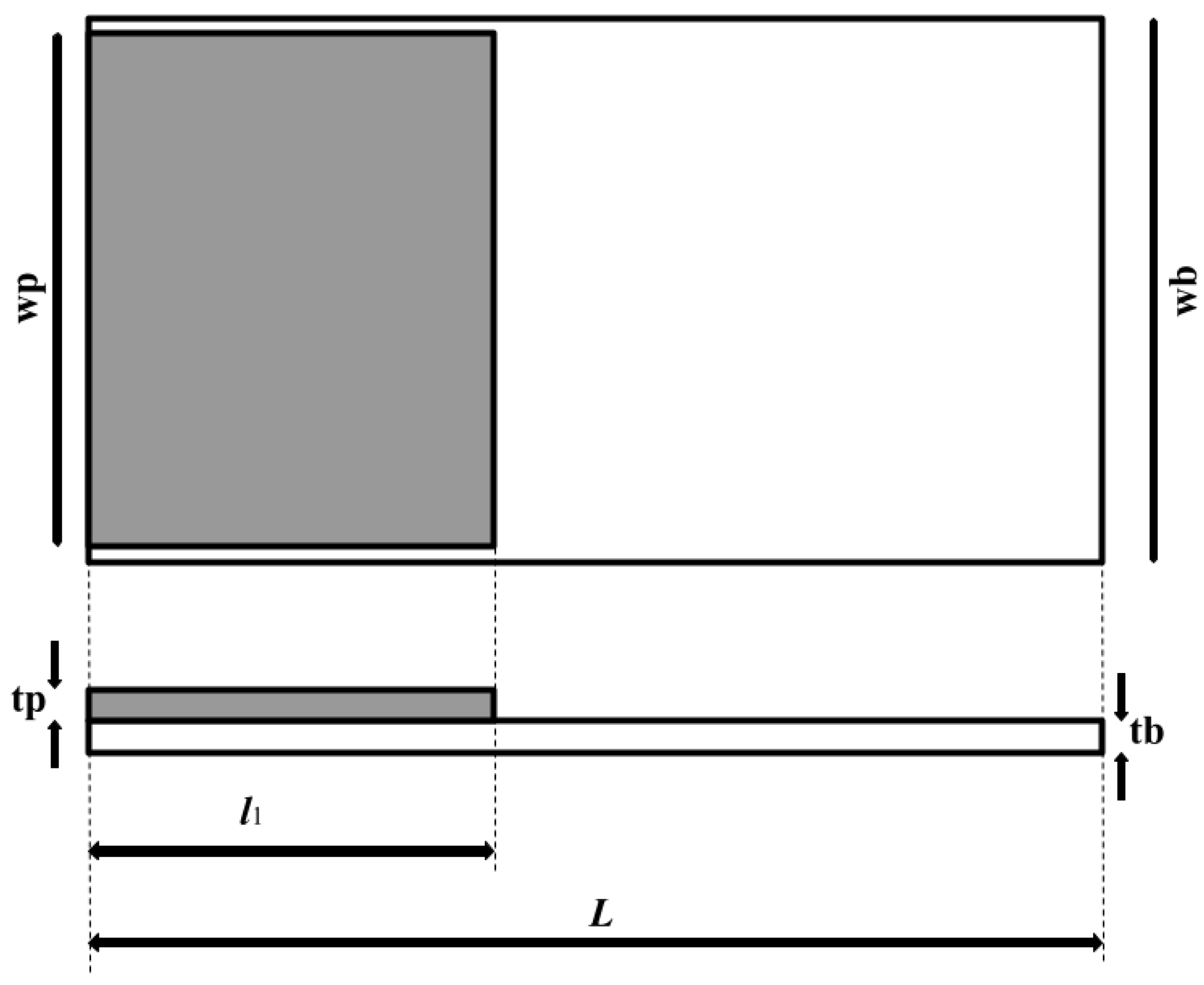
2.1.1. Transverse Vibration Analysis
2.1.2. Forced Vibration Analysis
2.2. FEM Analysis in ANSYS
2.3. Equivalent Circuit Analysis
2.4. Experimental Verification
3. Results
3.1. Analytical Vibration Analysis
3.2. Simulation of the Resonance Frequency Response of Microcantilever to the Added Mass
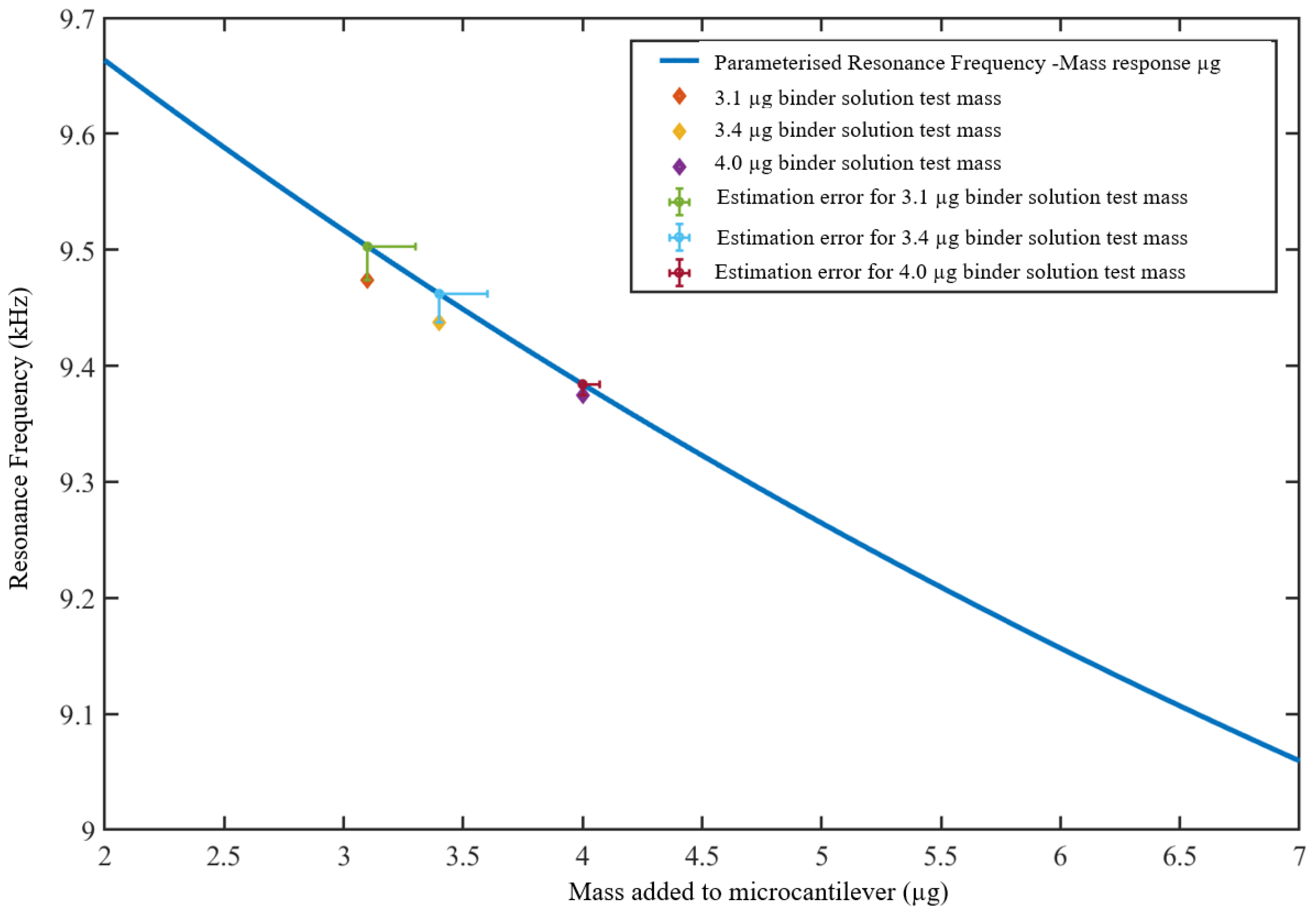
3.3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chaudhary, M.; Gupta, A. Microcantilever-based sensors. Def. Sci. J. 2009, 59, 634–641. [Google Scholar] [CrossRef] [Green Version]
- Yoo, K.; Na, K.; Joung, S.; Nahm, B.; Kang, C.; Kim, Y. Microcantilever-based biosensor for detection of various biomolecules. Jpn. J. Appl. Phys. 2006, 45, 515. [Google Scholar] [CrossRef]
- Vashist, S. A review of microcantilevers for sensing applications. J. Nanotechnol. 2007, 3, 1–18. [Google Scholar]
- Afshari, M.; Jalili, N. Towards non-linear modeling of molecular interactions arising from adsorbed biological species on the microcantilever surface. Int. J. -Non-Linear Mech. 2007, 42, 588–595. [Google Scholar] [CrossRef]
- Thundat, T.; Oden, P.; Warmack, R. Microcantilever sensors. Microscale Thermophys. Eng. 1997, 1, 185–199. [Google Scholar] [CrossRef]
- Sone, H.; Fujinuma, Y.; Hosaka, S. Picogram mass sensor using resonance frequency shift of cantilever. Jpn. J. Appl. Phys. 2004, 43, 3648. [Google Scholar] [CrossRef]
- Yang, J.; Ono, T.; Esashi, M. Mechanical behavior of ultrathin microcantilever. Sens. Actuators A Phys. 2000, 82, 102–107. [Google Scholar] [CrossRef]
- Alexi, N.; Hvam, J.; Lund, B.; Nsubuga, L.; de Oliveira Hansen, R.M.; Thamsborg, K.; Lofink, F.; Byrne, D.; Leisner, J. Potential of novel cadaverine biosensor technology to predict shelf life of chilled yellowfin tuna (Thunnus albacares). Food Control 2021, 119, 107458. [Google Scholar] [CrossRef]
- Alexi, N.; Thamsborg, K.; Hvam, J.; Lund, B.; Nsubuga, L.; de Oliveira Hansen, R.M.; Byrne, D.; Leisner, J. Novel cadaverine non-invasive biosensor technology on the prediction of shelf life of modified atmosphere packed pork cutlets. Meat Sci. 2022, 192, 108876. [Google Scholar] [CrossRef]
- Maijala, R.; Eerola, S. Contaminant lactic acid bacteria of dry sausages produce histamine and tyramine. Meat Sci. 1993, 35, 387–395. [Google Scholar] [CrossRef]
- Edwards, R.; Dainty, R.; Hibbard, C. The relationship of bacterial numbers and types to diamine concentration in fresh and aerobically stored beef, pork and lamb. Int. J. Food Sci. Technol. 1983, 18, 777–788. [Google Scholar] [CrossRef]
- Lakshmanan, R.; Xu, S.; Mutharasan, R. Impedance change as an alternate measure of resonant frequency shift of piezoelectric-excited millimeter-sized cantilever (PEMC) sensors. Sens. Actuators B Chem. 2010, 145, 601–604. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, M.; Vafai, K.; Ozkan, C. Design and analysis of microcantilevers for biosensing applications. JALA 2003, 8, 90–93. [Google Scholar]
- Zhu, Q. Microcantilever sensors in biological and chemical detections. Sens. Transducers 2011, 125, 1. [Google Scholar]
- Narducci, M.; Figueras, E.; Lopez, M.; Gràcia, I.; Fonseca, L.; Sant, J.; Cané, C. A high sensitivity silicon microcantilever-based mass sensor. In Proceedings of the SENSORS, 2008 IEEE, Lecce, Italy, 26–29 October 2008; pp. 1127–1130. [Google Scholar]
- Lang, H.; Gerber, C. Microcantilever sensors. In STM And AFM Studies on (bio) Molecular Systems: Unravelling the Nanoworld; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–27. [Google Scholar]
- Zinoviev, K.; Plaza, J.; Cadarso, V.; Dominguez, C.; Lechuga, L. Optical biosensor based on arrays of waveguided microcantilevers. Silicon Photonics II 2007, 6477, 348–360. [Google Scholar]
- Xu, J.; Bertke, M.; Wasisto, H.; Peiner, E. Piezoresistive microcantilevers for humidity sensing. J. Micromechanics Microengineering 2019, 29, 053003. [Google Scholar] [CrossRef]
- Raiteri, R.; Grattarola, M.; Butt, H.; Skládal, P. Micromechanical cantilever-based biosensors. Sens. Actuators B Chem. 2001, 79, 115–126. [Google Scholar] [CrossRef]
- Debéda, H.; Dufour, I. Chapter 9-Resonant microcantilever devices for gas sensing. In Collection Advanced Nanomaterials for Inexpensive Gas Microsensors; Elsevier: Amsterdam, The Netherlands, 2020; pp. 161–188. Available online: https://www.sciencedirect.com/science/article/pii/B9780128148273000098 (accessed on 19 December 2022).
- Dong, Y.; Gao, W.; Zhou, Q.; Zheng, Y.; You, Z. Characterization of the gas sensors based on polymer-coated resonant microcantilevers for the detection of volatile organic compounds. Anal. Chim. Acta 2010, 671, 85–91. [Google Scholar] [CrossRef]
- Xu, J.; Bertke, M.; Setiono, A.; Schmidt, A.; Peiner, E. ZNO Nanostructures Functionalized Piezoresistive Silicon Microcantilever Platform for Portable Gas Sensing. In Proceedings of the 2019 IEEE 32nd International Conference On Micro Electro Mechanical Systems (MEMS), Seoul, Republic of Korea, 27–31 January 2019; pp. 456–459. [Google Scholar]
- Hosseini, S.; Kalhori, H.; Shooshtari, A.; Mahmoodi, S. Analytical solution for nonlinear forced response of a viscoelastic piezoelectric cantilever beam resting on a nonlinear elastic foundation to an external harmonic excitation. Compos. Part B Eng. 2014, 67, 464–471. [Google Scholar] [CrossRef]
- Hosseini, S.; Shooshtari, A.; Kalhori, H.; Mahmoodi, S. Nonlinear-forced vibrations of piezoelectrically actuated viscoelastic cantilevers. Nonlinear Dyn. 2014, 78, 571–583. [Google Scholar] [CrossRef]
- Mahmoodi, S.; Daqaq, M.; Jalili, N. On the nonlinear-flexural response of piezoelectrically driven microcantilever sensors. Sens. Actuators A Phys. 2009, 153, 171–179. [Google Scholar] [CrossRef]
- Mahmoodi, S.; Jalili, N.; Daqaq, M. Modeling, nonlinear dynamics, and identification of a piezoelectrically actuated microcantilever sensor. IEEE/ASME Trans. Mechatron. 2008, 13, 58–65. [Google Scholar] [CrossRef]
- Ke, L.; Wang, Y.; Wang, Z. Nonlinear vibration of the piezoelectric nanobeams based on the nonlocal theory. Compos. Struct. 2012, 94, 2038–2047. [Google Scholar] [CrossRef]
- Ribeiro, P.; Thomas, O. Nonlinear modes of vibration and internal resonances in nonlocal beams. J. Comput. Nonlinear Dyn. 2017, 12, 3. [Google Scholar] [CrossRef]
- Yong, Y.; Moheimani, S.; Kenton, K. Invited review article: High-speed flexure-guided nanopositioning: Mechanical design and control issues. Rev. Sci. Instrum. 2012, 83, 121101. [Google Scholar] [CrossRef] [PubMed]
- Villanueva, L.; Karabalin, R.; Matheny, M.; Chi, D.; Sader, J.; Roukes, M. Nonlinearity in nanomechanical cantilevers. Phys. Rev. B 2013, 87, 024304. [Google Scholar] [CrossRef]
- Venstra, W.; Capener, M.; Elliott, S. Nanomechanical gas sensing with nonlinear resonant cantilevers. Nanotechnology 2014, 25, 425501. [Google Scholar] [CrossRef] [PubMed]
- Burra, R.; Vankara, J.; Reddy, D. Effect of added mass using resonant peak shifting technique. J. Micro/Nanolithography Mems. Moems 2012, 11, 021203. [Google Scholar] [CrossRef]
- Rabih, A.; Dennis, J.; Khir, M.; Abdullah, M. Mass detection using a macro-scale piezoelectric bimorph cantilever. In Proceedings of the 2013 IEEE International Conference on Smart Instrumentation, Measurement and Applications (ICSIMA), Kuala Lumpur, Malaysia, 25–27 November 2013; pp. 1–6. [Google Scholar]
- Subhashini, S.; Juliet, A. CO2 Gas Sensor Using Resonant Frequency Changes in Micro-Cantilever. In Computer Networks & Communications (NetCom); Springer: New York, NY, USA, 2013; pp. 75–80. [Google Scholar]
- Bouchaala, A.; Nayfeh, A.; Younis, M. Analytical study of the frequency shifts of micro and nano clamped–clamped beam resonators due to an added mass. Meccanica 2017, 52, 333–348. [Google Scholar] [CrossRef]
- Lam, N.; Hayashi, S.; Gutschmidt, S. A novel MEMS sensor concept to improve signal-to-noise ratios. Int. J. -Non-Linear Mech. 2022, 139, 103863. [Google Scholar] [CrossRef]
- Qiao, Y.; Wei, W.; Arabi, M.; Xu, W.; Abdel-Rahman, E. Analysis of response to thermal noise in electrostatic MEMS bifurcation sensors. Nonlinear Dyn. 2022, 107, 33–49. [Google Scholar] [CrossRef]
- Karparvarfard, S.; Asghari, M.; Vatankhah, R. A geometrically nonlinear beam model based on the second strain gradient theory. Int. J. Eng. Sci. 2015, 91, 63–75. [Google Scholar] [CrossRef]
- Kong, S.; Zhou, S.; Nie, Z.; Wang, K. The size-dependent natural frequency of Bernoulli–Euler micro-beams. Int. J. Eng. Sci. 2008, 46, 427–437. [Google Scholar] [CrossRef]
- Park, S.; Gao, X. Bernoulli–Euler beam model based on a modified couple stress theory. J. Micromechanics Microengineering 2006, 16, 2355. [Google Scholar] [CrossRef]
- Awrejcewicz, J.; Krysko, V.; Pavlov, S.; Zhigalov, M.; Krysko, A. Mathematical model of a three-layer micro-and nano-beams based on the hypotheses of the Grigolyuk–Chulkov and the modified couple stress theory. Int. J. Solids Struct. 2017, 117, 39–50. [Google Scholar] [CrossRef]
- Sarrafan, A.; Zareh, S.; Zabihollah, A.; Khayyat, A. Intelligent vibration control of micro-cantilever beam in MEMS. In Proceedings of the 2011 IEEE International Conference on Mechatronics, Istanbul, Turkey, 13–15 April 2011; pp. 336–341. [Google Scholar]
- Vatankhah, R.; Karami, F.; Salarieh, H.; Alasty, A. Stabilization of a vibrating non-classical micro-cantilever using electrostatic actuation. Sci. Iran. 2013, 20, 1824–1831. [Google Scholar]
- Jokić, I.; Djurić, Z.; Frantlović, M.; Radulović, K.; Krstajić, P. Fluctuations of the mass adsorbed on microcantilever sensor surface in liquid-phase chemical and biochemical detection. Microelectron. Eng. 2012, 97, 396–399. [Google Scholar] [CrossRef]
- Chen, G.; Thundat, T.; Wachter, E.; Warmack, R. Adsorption-induced surface stress and its effects on resonance frequency of microcantilevers. J. Appl. Phys. 1995, 77, 3618–3622. [Google Scholar] [CrossRef]
- Dareing, D.; Thundat, T. Simulation of adsorption-induced stress of a microcantilever sensor. J. Appl. Phys. 2005, 97, 043525–043526. [Google Scholar] [CrossRef]
- Ramos, D.; Calleja, M.; Mertens, J.; Zaballos, Á.; Tamayo, J. Measurement of the mass and rigidity of adsorbates on a microcantilever sensor. Sensors 2007, 7, 1834–1845. [Google Scholar] [CrossRef] [Green Version]
- Mouro, J.; Pinto, R.; Paoletti, P.; Tiribilli, B. Microcantilever: Dynamical Response for Mass Sensing and Fluid Characterization. Sensors 2021, 21, 115. [Google Scholar] [CrossRef]
- Sherrit, S.; Wiederick, H.; Mukherjee, B. Accurate equivalent circuits for unloaded piezoelectric resonators. In Proceedings of the 1997 IEEE Ultrasonics Symposium Proceedings. An International Symposium (Cat. No. 97CH36118), Toronto, ON, Canada, 5–8 October 1997; Volume 2, pp. 931–935. [Google Scholar]
- Jalili, N. Piezoelectric-Based Vibration Control: From Macro to Micro/Nano Scale Systems; Springer Science & Business Media: New York, NY, USA, 2009. [Google Scholar]
- Rao, S. Vibration of Continuous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Sosale, G.; Das, K.; Fréchette, L.; Vengallatore, S. Controlling damping and quality factors of silicon microcantilevers by selective metallization. J. Micromechanics Microengineering 2011, 21, 105010. [Google Scholar] [CrossRef]
- Kokubun, K.; Hirata, M.; Murakami, H.; Toda, Y.; Ono, M. A bending and stretching mode crystal oscillator as a friction vacuum gauge. Vacuum 1984, 34, 731–735. [Google Scholar] [CrossRef]
- Nor, N.; Khalid, N.; Osman, R.; Sauli, Z. Estimation of Material Damping Coefficients of AlN for Film Bulk Acoustic Wave Resonator. Mater. Sci. Forum 2015, 819, 209–214. [Google Scholar] [CrossRef]
- Uzunov, I.; Terzieva, M.; Nikolova, B.; Gaydazhiev, D. Extraction of modified butterworth—Van Dyke model of FBAR based on FEM analysis. In Proceedings of the 2017 XXVI International Scientific Conference Electronics (ET), Sozopol, Bulgaria, 13–15 September 2017; pp. 1–4. [Google Scholar]
- Zhao, J.; Liu, S.; Huang, Y.; Gao, R. A new impedance based sensitivity model of piezoelectric resonant cantilever sensor. In Proceedings of the World Congress on Advances In Structural Engineering And Mechanics, Ilsan(Seoul), Republic of Korea, 28 August–1 September 2017. [Google Scholar]
- Burda, I. Quartz Crystal Microbalance with Impedance Analysis Based on Virtual Instruments: Experimental Study. Sensors 2022, 22, 1506. [Google Scholar] [CrossRef]
- Keysight 4294a Precision Impedance Analyzer, 40 Hz to 110 mhz [obsolete]. Keysight 2021, 2. Available online: https://www.keysight.com/us/en/product/4294A/precision-impedance-analyzer-40-hz-to-110-mhz.html (accessed on 19 December 2022).
- Neurtek dat_oca_15ec_en. Dataphysics Products. Available online: https://www.neurtek.com/descargas/dat_oca_15ec_en.pdf (accessed on 19 December 2022).
- TA-Instruments tga-55. TA Instruments. Available online: https://www.tainstruments.com/tga-55/ (accessed on 19 December 2022).
- Dipak, P.; Tiwari, D.; Samadhiya, A.; Kumar, N.; Biswajit, T.; Singh, P.; Tiwari, R. Synthesis of polyaniline (printable nanoink) gas sensor for the detection of ammonia gas. J. Mater. Sci. Mater. Electron. 2020, 31, 22512–22521. Available online: https://link.springer.com/article/10.1007/s10854-020-04760-2 (accessed on 22 November 2022).
- Hagood, N.; Chung, W.; Von Flotow, A. Modelling of Piezoelectric Actuator Dynamics for Active Structural Control. J. Intell. Mater. Syst. Struct. 1990, 1, 327–354. [Google Scholar] [CrossRef]
- Reddy, R.; Panda, S.; Gupta, A. Nonlinear dynamics and active control of smart beams using shear/extensional mode piezoelectric actuators. Int. J. Mech. Sci. 2021, 204, 106495. [Google Scholar] [CrossRef]
- Mevada, H.; Patel, D. Experimental Determination of Structural Damping of Different Materials. Procedia Eng. 2016, 144, 110–115. [Google Scholar] [CrossRef]
- Pubchem Cadaverine. National Center For Biotechnology Information. PubChem Compound Database. Available online: https://pubchem.ncbi.nlm.nih.gov/compound/Cadaverine (accessed on 21 December 2022).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value | unit |
|---|---|---|
| l1 | 0.5 | mm |
| l2 | 1.0 | mm |
| w | 1.0 | mm |
| w | 1.0 | mm |
| tb | 20.0 | m |
| tp | 2.0 | m |
| E | 70.0 | GPa |
| E | 302.0 | Gpa |
| d31 | −1.9159 × 10−12 | C/N |
| ɛ | 11.5 × 10−12 | - |
| 3260 | Kg/m3 | |
| 2270 | Kg/m3 | |
| Vt | 5 | V |
| Mode | Resonance Frequency (kHz) Analytical Approach | Resonance Frequency (kHz) Numerical Approach | Difference in (kHz) | Percentage Error |
|---|---|---|---|---|
| Mode 1 | 10.553 | 10.556 | 0.003 | 0.028 |
| Mode 2 | 52.987 | 52.707 | 0.28 | 0.005 |
| Mode 2 | 135.37 | 132.92 | 2.45 | 0.018 |
| Known Mass (g) | Measured Resonance Frequency (kHz) | Deduced Adsorbed Mass Based on Polynomial (g) | Difference in Known Mass and Deduced Mass | Expected Resonance Frequency to Fit Polynomial (kHz) | Mass Estimation Tolerance (%) |
|---|---|---|---|---|---|
| 169 | 8.5774 | 170 | 1 | 8.5671 | 0.59 |
| 338 * | 8.2645 | 222 * | 116 * | 7.7464 | 52.25 * |
| 507 * | 7.9992 | 277 * | 230 * | 7.1174 | 83.03 * |
| Known Mass (g) | Measured Resonance Frequency (kHz) | Deduced Adsorbed Mass Based on Polynomial (g) | Difference in Known Mass and Deduced Mass | Expected Resonance Frequency to Fit Polynomial (kHz) | Mass Estimation Tolerance (%) |
|---|---|---|---|---|---|
| 3.1 | 9.4742 | 3.3 | 0.2 | 9.5027 | 6.06 |
| 3.4 | 9.4372 | 3.6 | 0.2 | 9.4620 | 5.56 |
| 4.0 | 9.3746 | 4.07 | 0.07 | 9.3841 | 1.72 |
| Concentration of the Cadaverine () | Measured Resonance Frequency (kHz) | Deduced Total on the Microcantilever Based on the Polynomial (g) | Deduced Adsorbed Mass of Cadaverine (g) |
|---|---|---|---|
| 0.0551 | 8.9618 | 8.1 | 4.7 |
| 0.0827 | 8.8833 | 9.1 | 5.7 |
| 0.1103 | 8.8520 | 9.5 | 6.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nsubuga, L.; Duggen, L.; Marcondes, T.L.; Høegh, S.; Lofink, F.; Meyer, J.; Rubahn, H.-G.; de Oliveira Hansen, R. Gas Adsorption Response of Piezoelectrically Driven Microcantilever Beam Gas Sensors: Analytical, Numerical, and Experimental Characterizations. Sensors 2023, 23, 1093. https://doi.org/10.3390/s23031093
Nsubuga L, Duggen L, Marcondes TL, Høegh S, Lofink F, Meyer J, Rubahn H-G, de Oliveira Hansen R. Gas Adsorption Response of Piezoelectrically Driven Microcantilever Beam Gas Sensors: Analytical, Numerical, and Experimental Characterizations. Sensors. 2023; 23(3):1093. https://doi.org/10.3390/s23031093
Chicago/Turabian StyleNsubuga, Lawrence, Lars Duggen, Tatiana Lisboa Marcondes, Simon Høegh, Fabian Lofink, Jana Meyer, Horst-Günter Rubahn, and Roana de Oliveira Hansen. 2023. "Gas Adsorption Response of Piezoelectrically Driven Microcantilever Beam Gas Sensors: Analytical, Numerical, and Experimental Characterizations" Sensors 23, no. 3: 1093. https://doi.org/10.3390/s23031093
APA StyleNsubuga, L., Duggen, L., Marcondes, T. L., Høegh, S., Lofink, F., Meyer, J., Rubahn, H. -G., & de Oliveira Hansen, R. (2023). Gas Adsorption Response of Piezoelectrically Driven Microcantilever Beam Gas Sensors: Analytical, Numerical, and Experimental Characterizations. Sensors, 23(3), 1093. https://doi.org/10.3390/s23031093