
Microstructure Turbulence Measurement in the Northern South China Sea from a Long-Range Hybrid AUV


Abstract
:1. Introduction
2. Methods
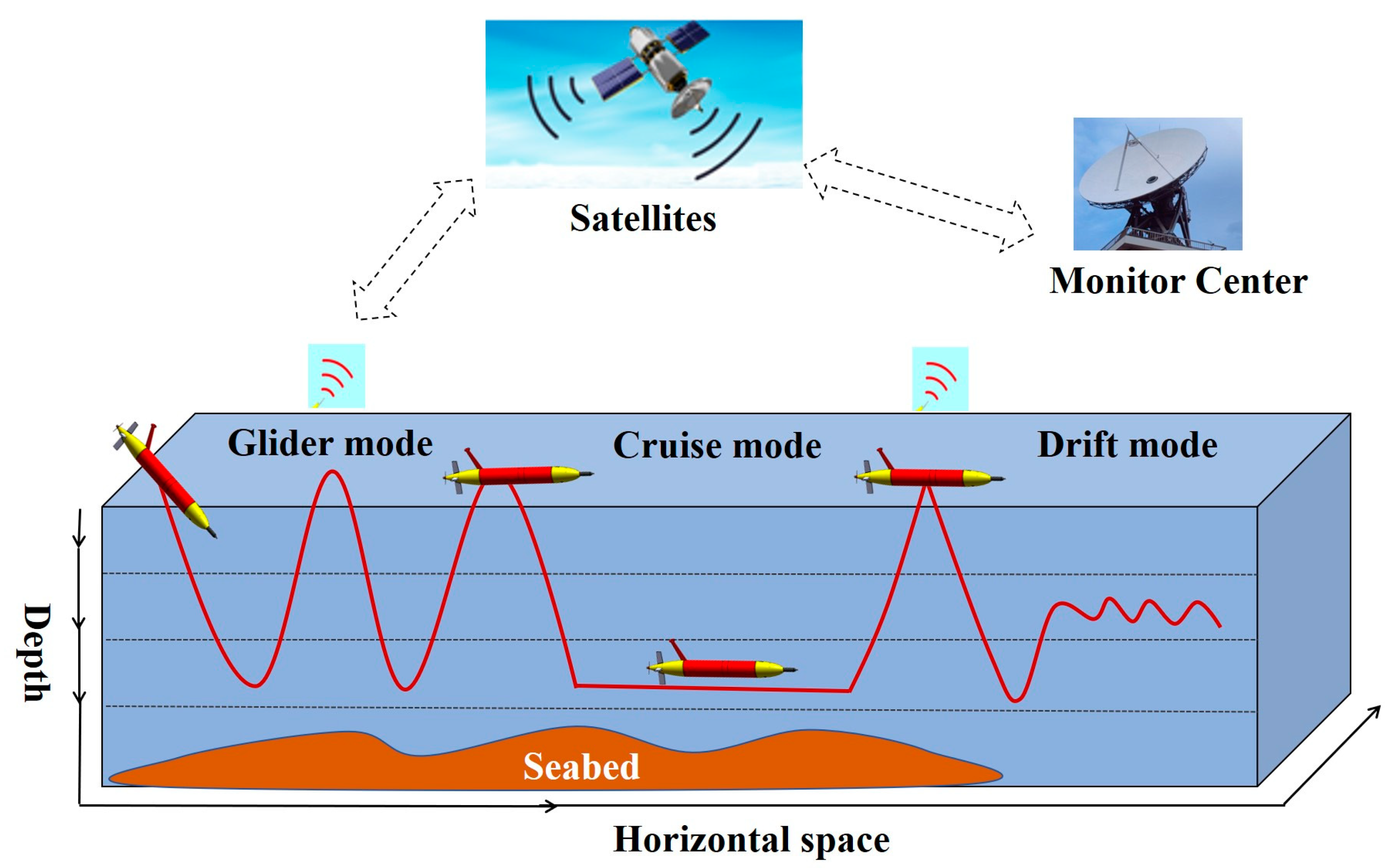
2.1. The Long-Range Hybrid AUV
2.2. CPMTM
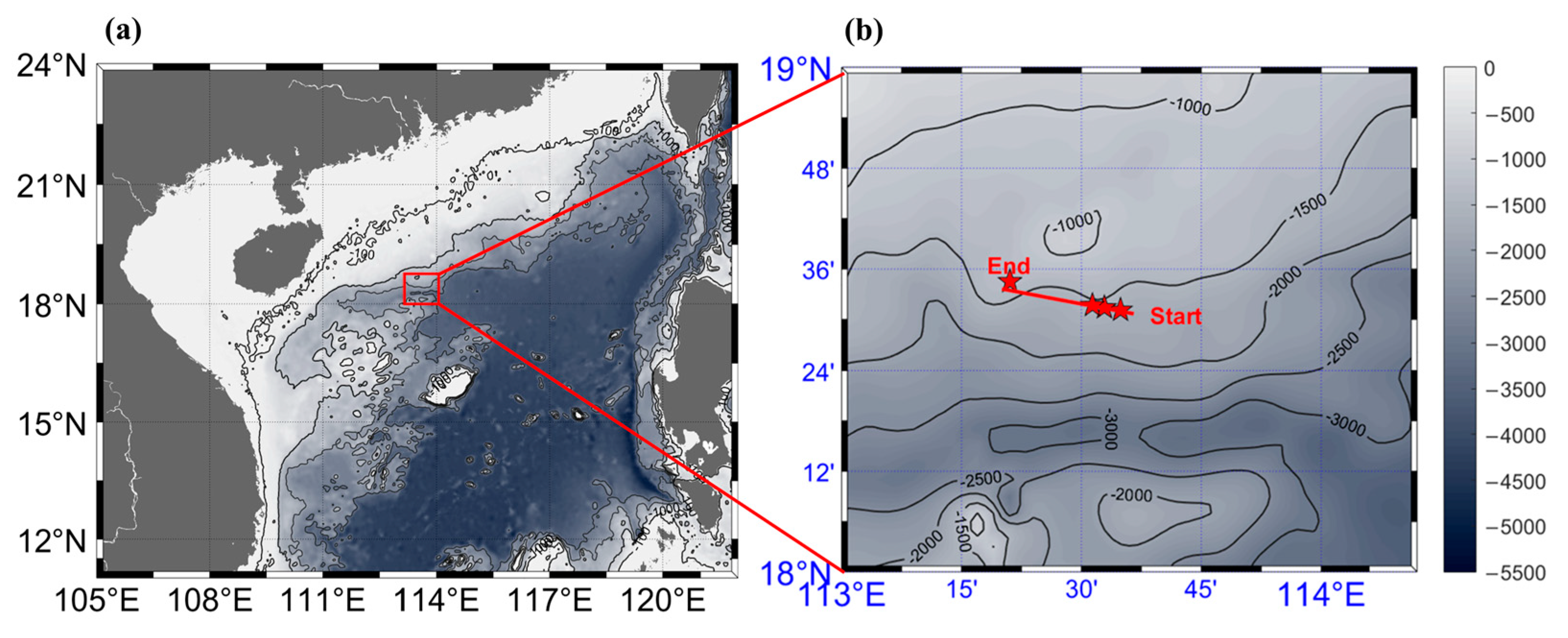
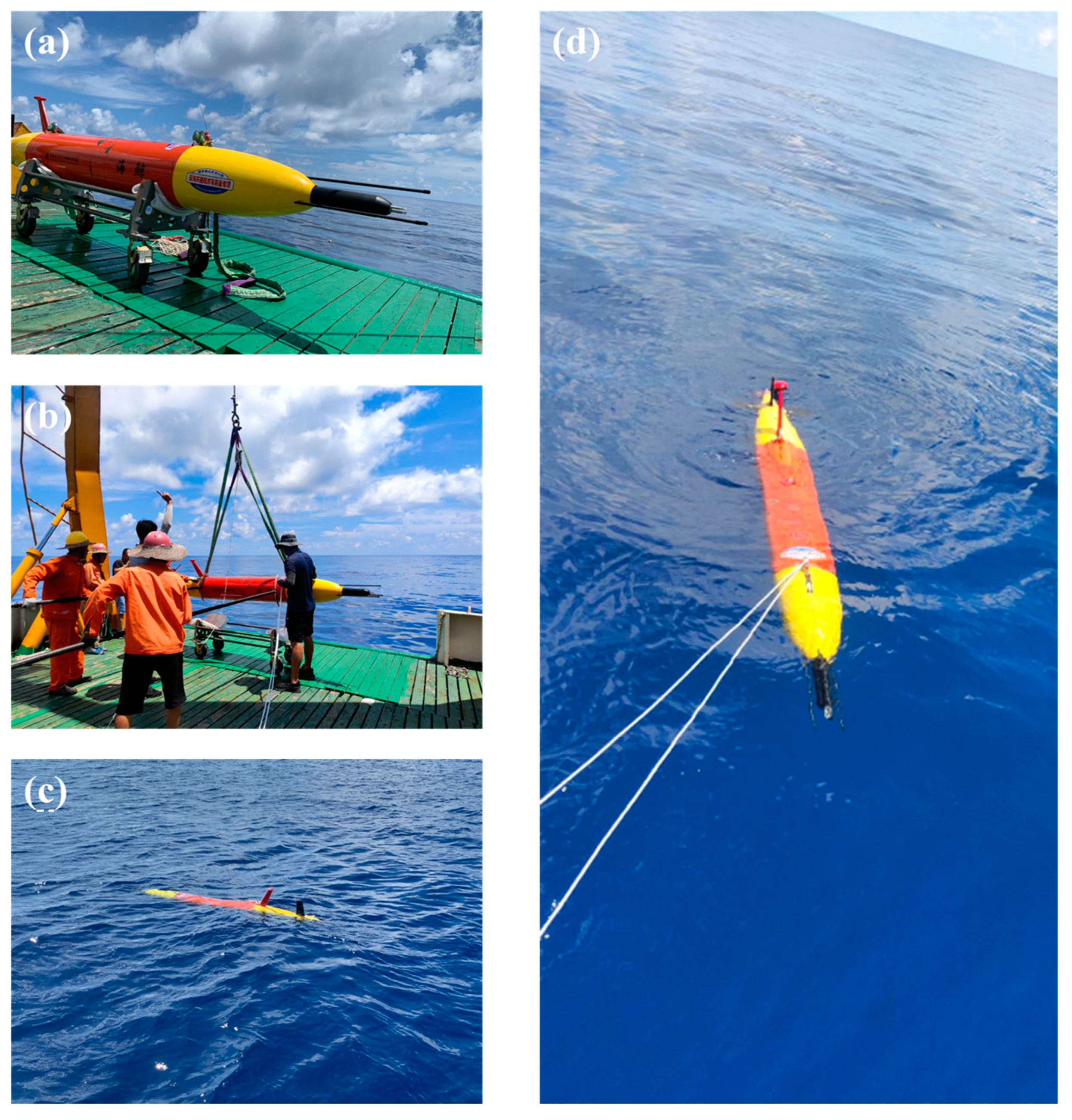
3. Experiment
4. Results
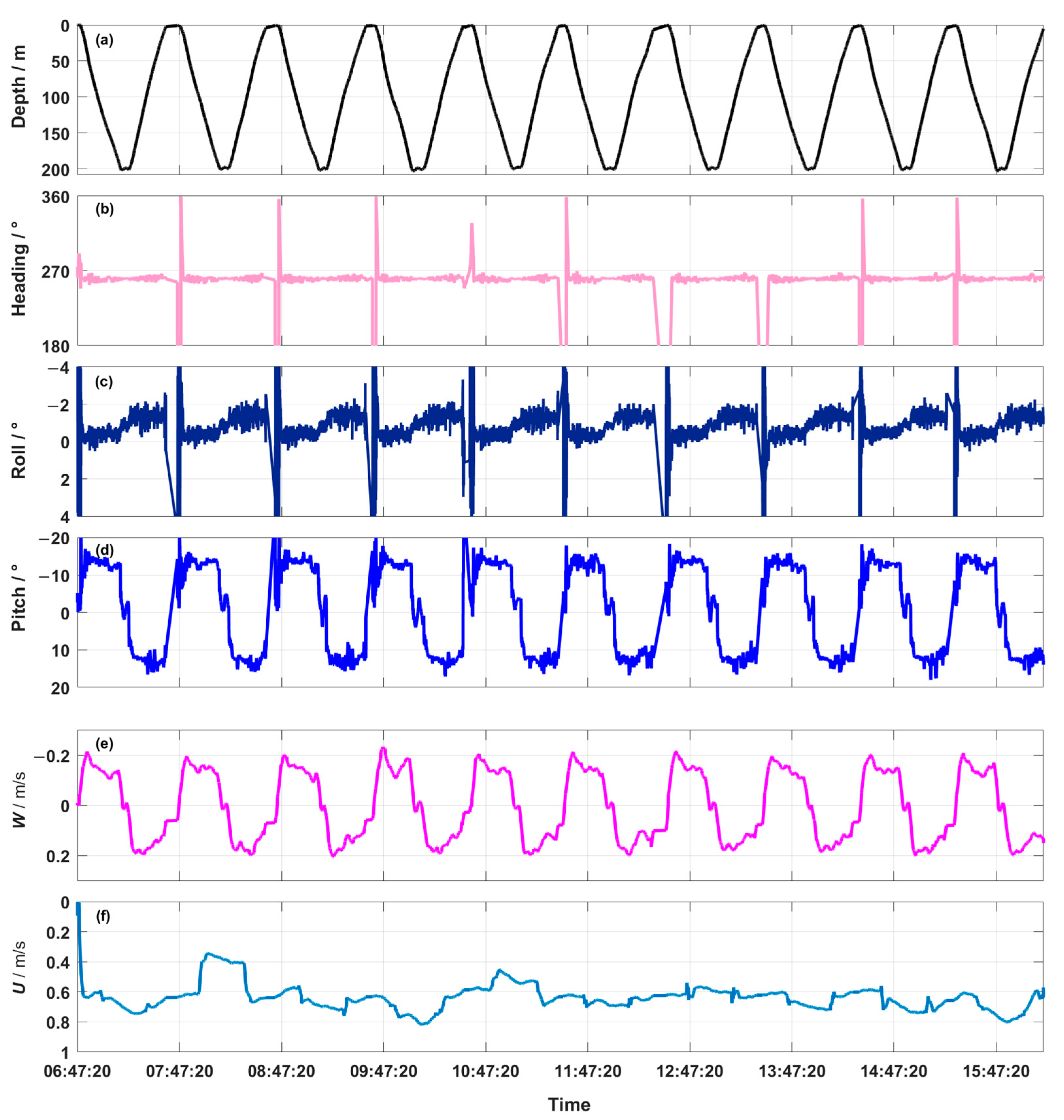
4.1. Flight Performance
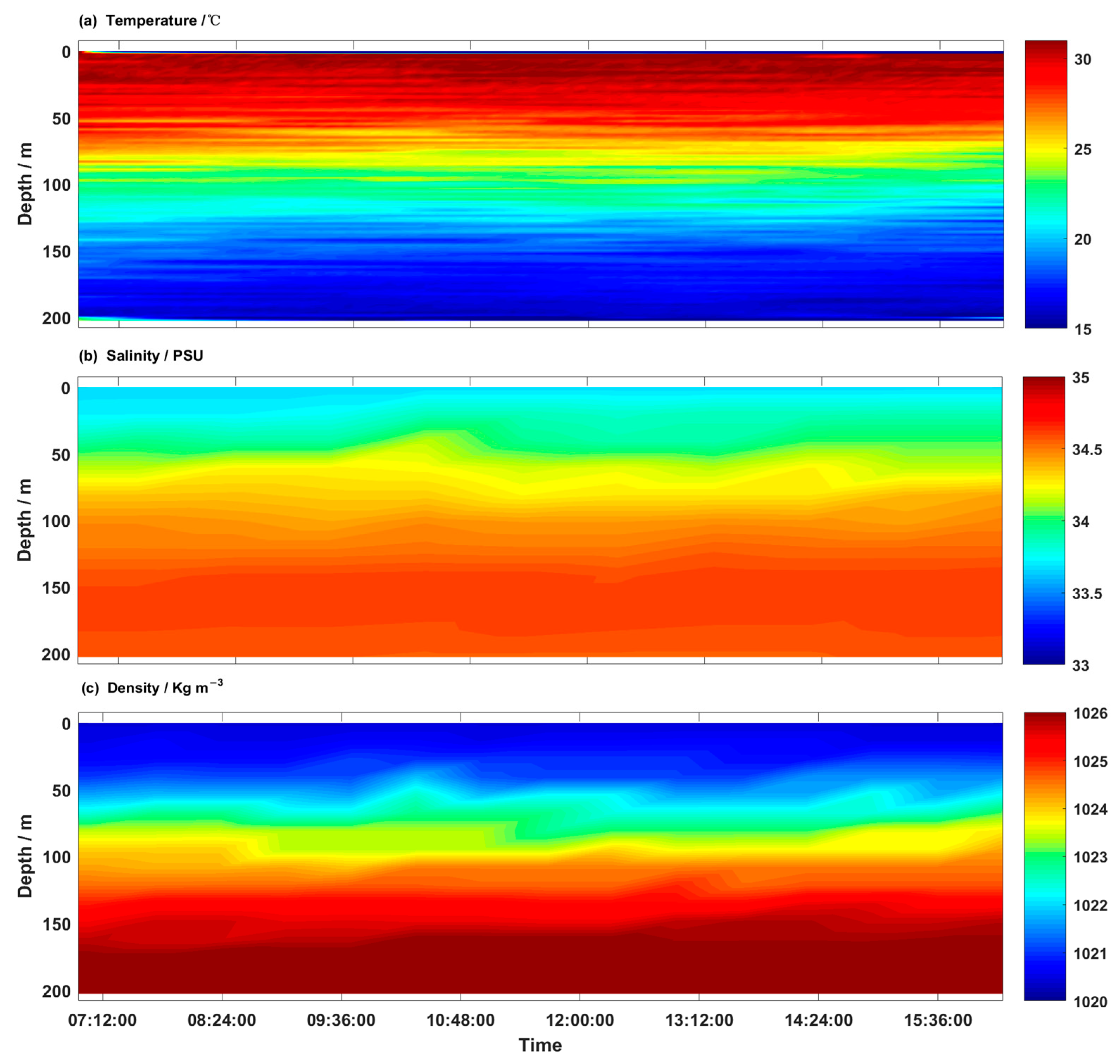
4.2. Hydrography
4.3. Microstructure Data
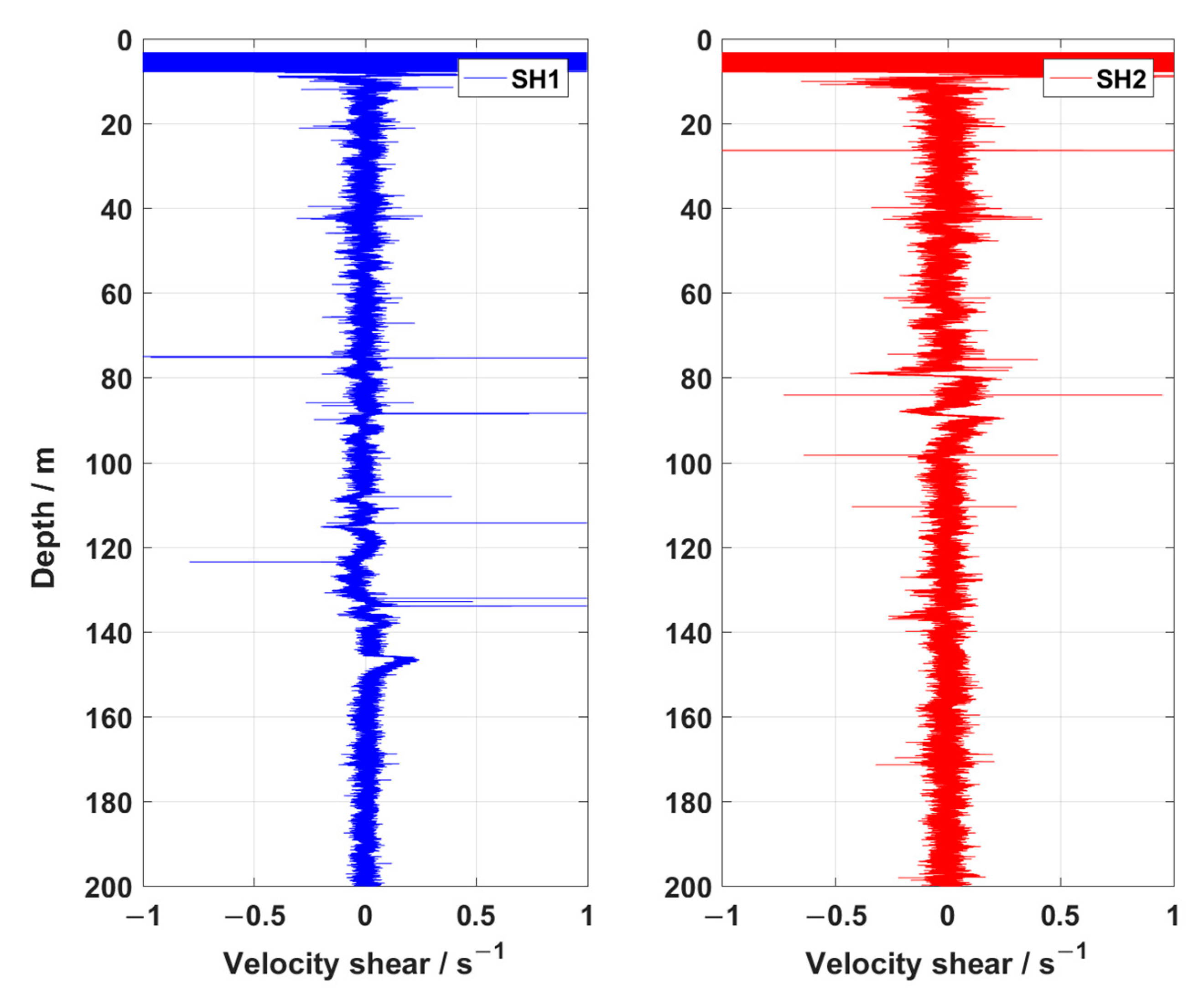
4.3.1. Data Screening: Shear Probes
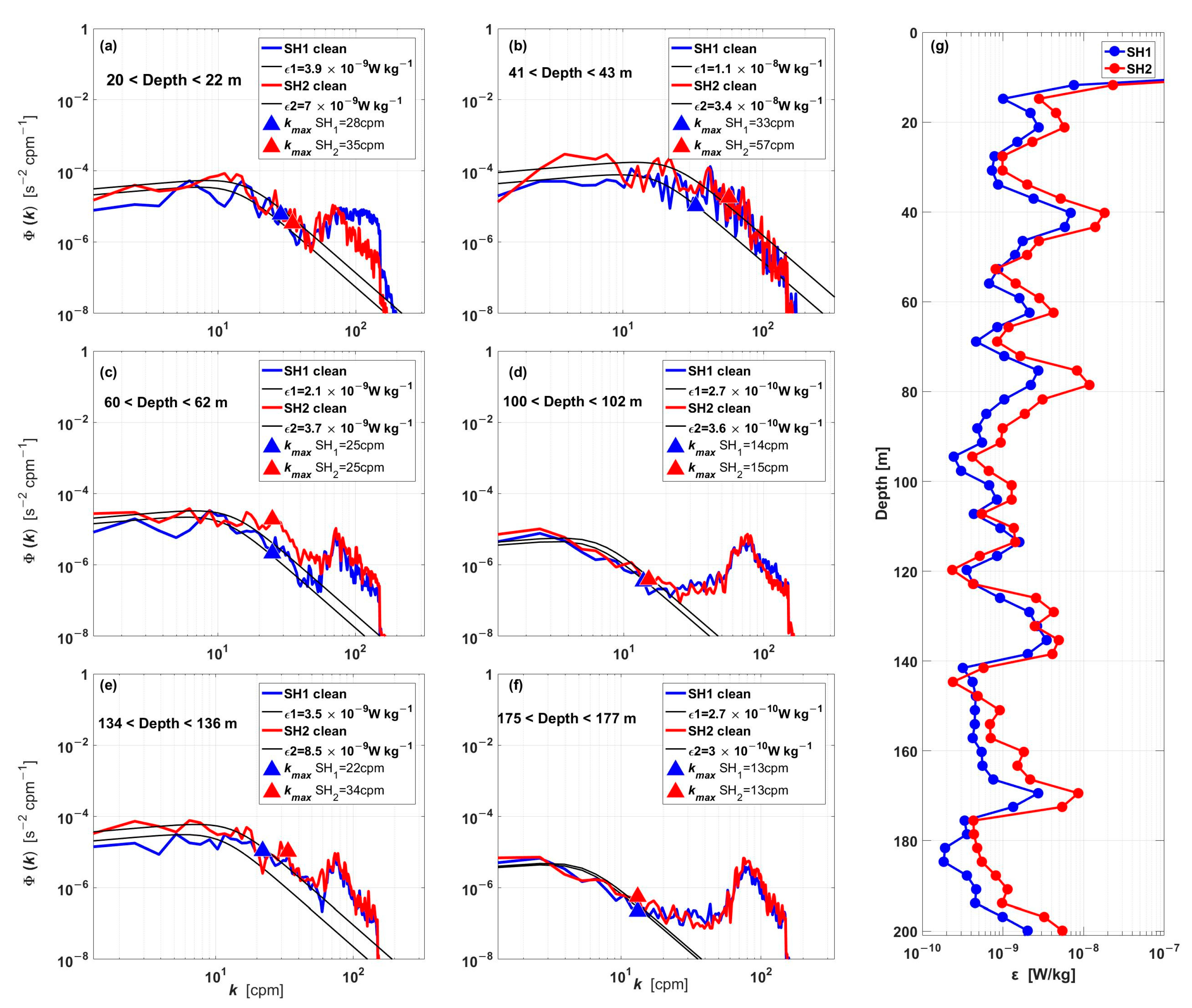
4.3.2. Shear Spectra
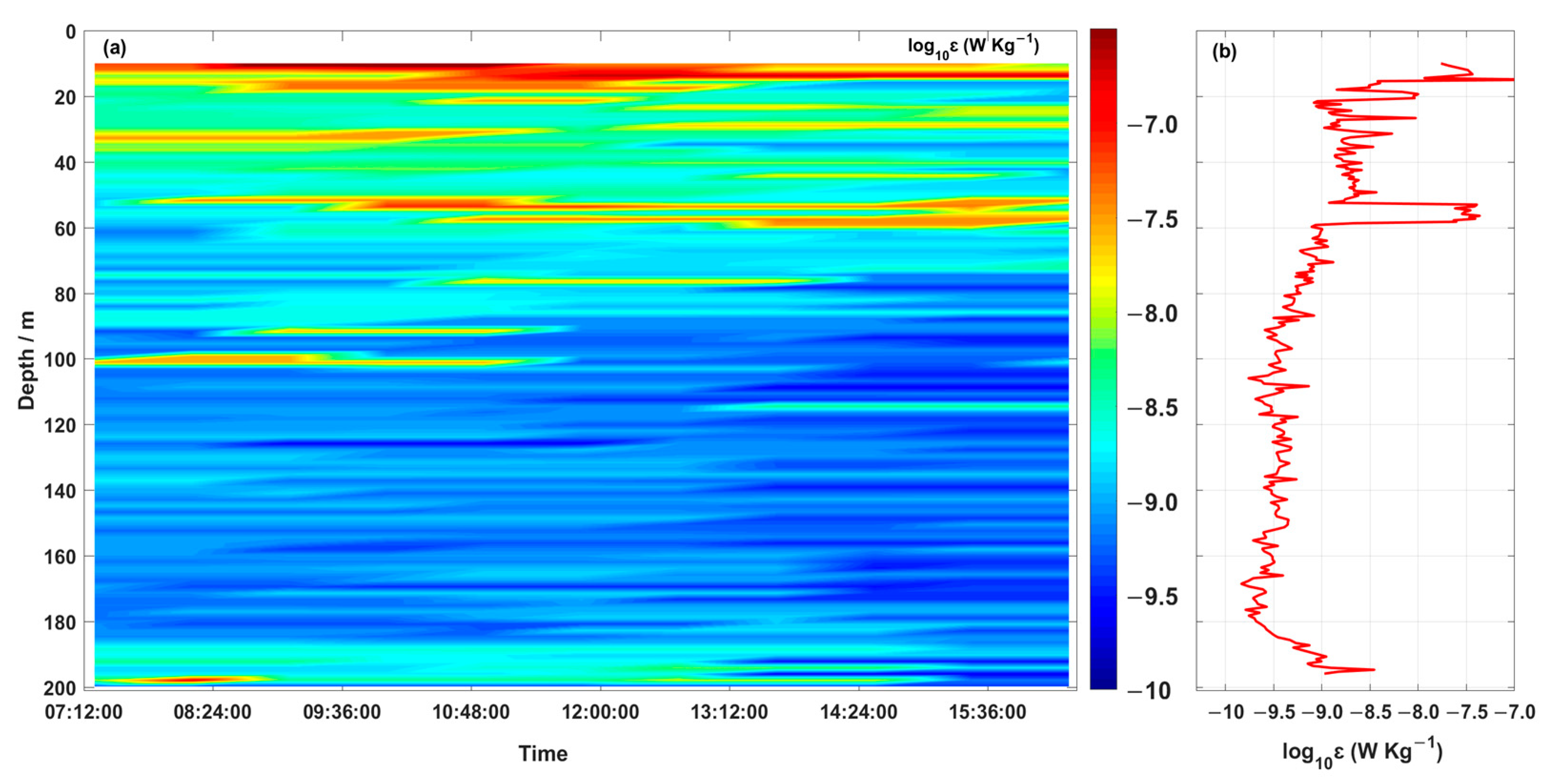
4.3.3. Estimation of Kinetic Energy Dissipation Rate
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| AUV | Autonomous underwater vehicle |
| nSCS | the northern South China Sea |
| CPMTM | Cross-platform instrument for microstructure turbulence measurements |
| CTD | Conductivity, temperature, depth |
| DVL | Doppler velocity log |
| R/V | Research vessel |
| AOA | Angle of attack |
| PSU | Practical salinity units |
| FFT | Fast-Fourier transform |
| ε | The dissipation rate |
| θ | The pitch angle |
| γ | The glide angle |
| α | The angle of attack |
| U | The hybrid AUV speed through water |
| P | Pressure |
| W | The vertical speed |
| k | The wavenumber |
| Kρ | The intensity of diapycnal mixing |
References
- Holappa, K.W. Ocean Turbulence Measurement Using an Autonomous Underwater Vehicle; Florida Atlantic University: Boca Raton, FL, USA, 1997. [Google Scholar]
- Creed, E.; Ross, W.; Lueck, R.; Stern, P.; Douglas, W.; Wolk, F.; Hall, R. Integration of a RSI microstructure sensing package into a Seaglider. In Proceedings of the OCEANS 2015—MTS/IEEE Washington 2015, Washington, DC, USA, 19–22 October 2015. [Google Scholar]
- Lueck, R.G.; Wolk, F.; Yamazaki, H. Oceanic velocity microstructure measurements in the 20th century. J. Oceanogr. 2002, 58, 153–174. [Google Scholar] [CrossRef]
- Grant, H.L.; Stewart, R.W.; Moilliet, A. Turbulence spectra from a tidal channel. J. Fluid Mech. 1962, 12, 241–263. [Google Scholar] [CrossRef]
- Grant, H.L.; Moilliet, A.; Vogel, W.M. Some observations of the occurrence of turbulence in and above the thermocline. J. Fluid Mech. 1968, 34, 443–498. [Google Scholar] [CrossRef]
- Dhanak, M.R.; Holappa, K. An autonomous ocean turbulence measurement platform. J. Atmos. Ocean. Technol. 1999, 16, 1506–1518. [Google Scholar] [CrossRef]
- Greenan, B.J.W.; Oakey, N.S. A tethered free-fall glider to measure ocean turbulence. J. Atmos. Ocean. 1999, 16, 1545–1555. [Google Scholar] [CrossRef]
- Goodman, L.; Wang, Z. Turbulence observations in the northern bight of monterey bay from a small AUV. J. Mar. Syst. 2009, 77, 441–458. [Google Scholar] [CrossRef]
- Wolk, F.; Lueck, R.G.; Laurent, L.S. Turbulence measurements from a glider. In Proceedings of the OCEANS 2009, MTS/IEEE Biloxi—Marine Technology for Our Future: Global and Local Challenges, Biloxi, MS, USA, 26–29 October 2009. [Google Scholar]
- Todd, R.E. High-frequency internal waves and thick bottom mixed layers observed by gliders in the Gulf Stream. Geophys. Res. Lett. 2017, 44, 6316–6325. [Google Scholar] [CrossRef]
- Nagai, T.; Inoue, R.; Tandon, A.; Yamazaki, H. Evidence of enhanced double-diffusive convection below the main stream of the Kuroshio Extension. J. Geophys. Res. Ocean. 2015, 120, 8402–8421. [Google Scholar] [CrossRef]
- Nie, Y.; Song, D.; Wang, Z.; Huang, Y.; Yang, H. Design and Motion Performance Analysis of Turbulent AUV Measuring Platform. Sensors 2022, 22, 460. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Qiao, J.; Yu, J.; Wang, Z.; Xie, Z.; Liu, K. Sea-Whale 2000: A Long-range Hybrid Autonomous Underwater Vehicle for Ocean Observation. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Nie, Y.; Yang, H.; Song, D.; Huang, Y.; Liu, X.; Hui, X. A new cross-platform instrument for microstructure turbulence measurements. J. Mar. Sci. Eng. 2021, 9, 1051. [Google Scholar] [CrossRef]
- Osborn, T.R.; Crawford, W.R. An airfoil probe for measuring turbulent velocity fluctuations in water. In Air-Sea Interaction; Springer: Boston, MA, USA, 1980. [Google Scholar]
- Goto, Y.; Yasuda, I.; Nagasawa, M. Turbulence Estimation Using Fast-Response Thermistors Attached to a Free-Fall Vertical Microstructure Profiler. J. Atmos. Ocean. Technol. 2016, 33, 2065–2078. [Google Scholar] [CrossRef]
- Tian, J.; Yang, Q.; Zhao, W. Enhanced Diapycnal Mixing in the South China Sea. J. Phys. Oceanogr. 2010, 39, 3191. [Google Scholar] [CrossRef]
- Fer, I.; Peterson, A.K.; Ullgren, J.E. Microstructure Measurements from an Underwater Glider in the Turbulent Faroe Bank Channel Overflow. J. Atmos. Ocean. Technol. 2014, 31, 1128–1150. [Google Scholar] [CrossRef]
- Merckelbach, L.; Smeed, D.; Griffiths, G. Vertical water velocities from underwater gliders. J. Atmos. Ocean. Technol. 2010, 27, 547–563. [Google Scholar] [CrossRef]
- Levitus, S. Climatological Atlas of the World Ocean; Noaa Professional Paper; Eos, Transactions American Geophysical Union: Washington, DC, USA, 1983; Volume 64, pp. 962–963. [Google Scholar]
- Goodman, L.; Levine, E.R.; Lueck, R.G. On measuring the terms of the turbulent kinetic energy budget from an AUV. J. Atmos. Ocean. Technol. 2006, 23, 977–990. [Google Scholar] [CrossRef]
- Nasmyth, P.W. Oceanic Turbulence. Ph.D. Thesis, Department of Physics, University of British Columbia, Vancouver, BC, Canada, 1970; p. 69. [Google Scholar]
- Wolk, F.; Yamazaki, H.; Seuront, L.; Lueck, R.G. A new free-fall profiler for measuring biophysical microstructure. J. Atmos. Ocean. Technol. 2002, 19, 780. [Google Scholar] [CrossRef]
- Gregg, M.C. Estimation and geography of diapycnal mixing in the stratified ocean. Coast Estuar. Stud. 1998, 54, 305–338. [Google Scholar]
- Polzin, K.L.; Toole, J.M.; Schmitt, R.W. Finescale parameterizations of turbulent dissipation. J. Phys. Oceanogr. 1995, 25, 306–328. [Google Scholar] [CrossRef]
- Thorpe, S. An Introduction to Ocean Turbulence; Cambridge University Press: Cambridge, UK, 2007; 264p. [Google Scholar]
- Shang, X.D.; Liang, C.D.; Chen, G.Y. Spatial distribution of turbulent mixing in the upper ocean of the south china sea. Ocean Sci. 2017, 13, 503–519. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Range | Precision | Resolution | Fs (Hz) |
|---|---|---|---|---|
| Current profiling | 16 m/s | ±0.1%/±0.1 cm/s | 0.1 cm/s | 8 |
| Temperature | −5–42 °C | ±0.002 °C | 0.001 °C | |
| Conductivity | 0–9 S/m | ±0.0003 S/m | 0.00001 S/m | 1 |
| Depth | 2000 m | ±0.1%/FS | 0.002%/FS | |
| Dissolved oxygen | 120% of saturation | ±2% of saturation | / | 1 |
| Velocity shear | 0–10 s−1 | 5% | 10–3 s−1 | 1024 |
| Fast temperature | −5–35 °C | 0.005 °C | 10–5 °C | 1024 |
| Accelerometer | ±2 g | ±1% | 10–5 g | 512 |
| Pitch (°) | Vertical Speed (m·s−1) | U (m·s−1) | |
|---|---|---|---|
| Descent | −13.42 ± 1.31 | −0.15 ± 0.02 | 0.57 ± 0.07 |
| Ascent | 12.78 ± 1.24 | 0.16 ± 0.02 | 0.65 ± 0.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, Y.; Luan, X.; Huang, Y.; Du, L.; Song, D.; Liu, X. Microstructure Turbulence Measurement in the Northern South China Sea from a Long-Range Hybrid AUV. Sensors 2023, 23, 2014. https://doi.org/10.3390/s23042014
Nie Y, Luan X, Huang Y, Du L, Song D, Liu X. Microstructure Turbulence Measurement in the Northern South China Sea from a Long-Range Hybrid AUV. Sensors. 2023; 23(4):2014. https://doi.org/10.3390/s23042014
Chicago/Turabian StyleNie, Yunli, Xin Luan, Yan Huang, Libin Du, Dalei Song, and Xiuyan Liu. 2023. "Microstructure Turbulence Measurement in the Northern South China Sea from a Long-Range Hybrid AUV" Sensors 23, no. 4: 2014. https://doi.org/10.3390/s23042014
APA StyleNie, Y., Luan, X., Huang, Y., Du, L., Song, D., & Liu, X. (2023). Microstructure Turbulence Measurement in the Northern South China Sea from a Long-Range Hybrid AUV. Sensors, 23(4), 2014. https://doi.org/10.3390/s23042014