
Relief Modeling in the Restoration of Extractive Activities Using Drone Imagery
 , , and
, , and
Abstract
:1. Introduction
2. Study Area, Materials, and Methods
2.1. Study Area
2.2. Materials
2.2.1. Drone Data
2.2.2. Lidar Data
2.3. Methods
2.3.1. Photogrammetric Flight
2.3.2. Data Processing and Analysis with GIS (I): Exploited Area Boundaries vs. Official Boundaries
2.3.3. Data Processing and Analysis with GIS (II): Generation and Validation of a Restoration Relief Model (DEM(r))
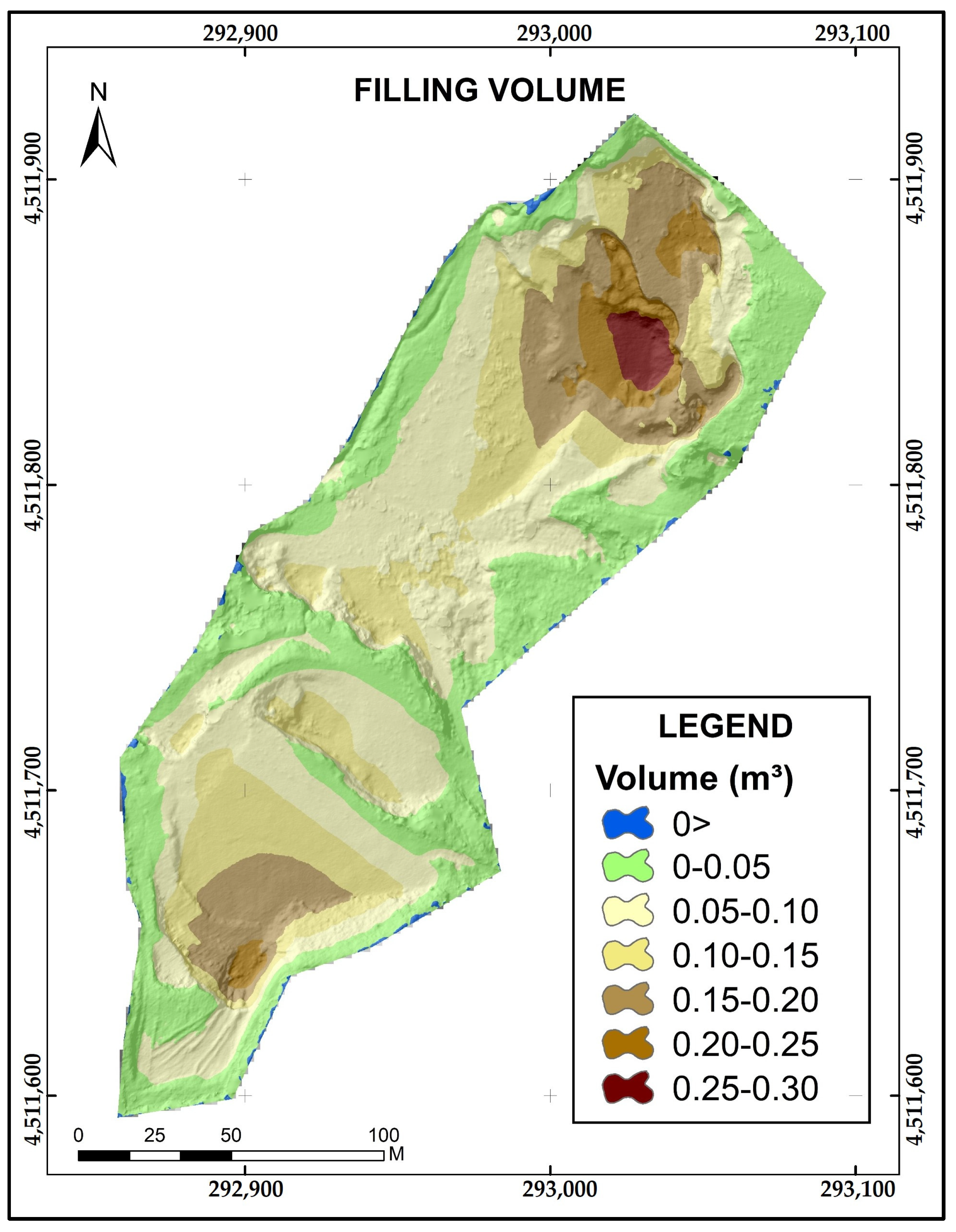
2.3.4. Data Processing and Analysis with GIS (III): Total Filling Volumetric Calculation
2.3.5. Data Processing and Analysis with GIS (IV): Water Flow Modeling
2.3.6. Data Processing and Analysis with GIS (V): Visual Basin Modeling
3. Results
3.1. Volumetric Calculation
3.2. Water Flow Modeling Results
3.3. Visual Basin Modeling Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DEM | Digital Elevation Model |
| DEM(i) | Integrated Digital Elevation Model |
| DEM(r) | Digital Elevation Model of the filling volume of material (restoration relief) |
| DEM-DRONE | Digital Elevation Model derived from drone |
| DEM-LIDAR | Digital Elevation Model derived from lidar |
| DHdM | Digital Height Difference Model [DEM(r)-DEM-DRONE] |
| DSM | Digital Surface Model |
| GIS | Geographical Information Systems |
| IDW | Inverse Weighted Distance |
| SfM | Structure from Motion software |
| TIN | Triangulated Irregular Network |
| UAS | Unmanned Aerial Systems |
References
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef]
- Ramli, M.; Thamrin, M.; Asrafil, M. Analysis of Soil Erosion on Mine Area. IOP Conf. Ser. Mater. Sci. Eng. 2020, 875, 012052. [Google Scholar] [CrossRef]
- United Nations Environment Programme. Sustainability Reporting in the Mining Sector. Current Status and Future Trends. Available online: https://www.unep.org/resources/report/sustainability-reporting-mining-sector (accessed on 1 January 2023).
- Young, R.E.; Gann, G.D.; Walder, B.; Liu, J.; Cui, W.; Newton, V.; Nelson, C.R.; Tashe, N.; Jasper, D.; Silveira, F.A.O.; et al. International principles and standards for the ecological restoration and recovery of mine sites. Restor. Ecol. 2022, 30, e13771. [Google Scholar] [CrossRef]
- Carabassa, V.; Ortiz, O.; Alcañiz, J.M. RESTOCAT Instruccions d’aplicació. Protocol per a l’avaluació de la Restauració d’activitats Extractives. Available online: https://mediambient.gencat.cat/web/.content/home/ambits_dactuacio/empresa_i_produccio_sostenible/restauracio_dactivitats_extractives/restocat/documents/restauracio_restocat.pdf (accessed on 1 January 2023).
- Mitas, L.; Mitasova, H. Spatial Interpolation. In Geographical Information Systems: Principles, Techniques, Management and Applications; Longley, P., Goodchild, M., Maguire, D., Rhind, D., Eds.; John Wiley & Sons: New York, NY, USA, 1999; pp. 481–492. [Google Scholar]
- Casanova, L. Topografía Plana. Available online: http://www.serbi.ula.ve/serbiula/libros-electronicos/Libros/topografia_plana/pdf/topografia.pdf (accessed on 1 January 2023).
- Achilleos, G.A. The Inverse Distance Weighted interpolation method and error propagation mechanism—Creating a DEM from an analogue topographical map. J. Spat. Sci. 2011, 56, 286–304. [Google Scholar] [CrossRef]
- Longley, P.A.; Goodchild, M.; Maguire, D.J.; Rhind, D.W. Geographic Information Systems and Science, 3rd ed.; John Wiley & Sons: New York, NY, USA, 2010; p. 560. [Google Scholar]
- Du, D.; Yan, S.; Yang, F.; Zhu, Z.; Song, Q.; Yang, G. Kriging Interpolation for Evaluating the Mineral Resources of Cobalt-Rich Crusts on Magellan Seamounts. Minerals 2018, 8, 374. [Google Scholar] [CrossRef]
- Hutchinson, M.F.; Stein, J.A.; Stein, J.L.; Xu, T. Locally Adaptive Gridding of Noisy High Resolution Topographic Data. Available online: https://www.mssanz.org.au/modsim09/F13/hutchinson.pdf (accessed on 1 January 2023).
- Hutchinson, M.F.; Xu, T.; Stein, J. Recent Progress in the ANUDEM Elevation Gridding Procedure. In Proceedings of the Geomorphometry 2011: Five days of Digital Terrain Analysis, Redlands, CA, USA, 7–11 September 2011. [Google Scholar]
- Pons, X. MiraMon. Geographical Information System and Remote Sensing Software, Version 8.01b; Centre for Ecological Research and Forestry Applications (CREAF). Bellaterra. 2004. Available online: http://www.creaf.uab.cat/miramon/Index_usa.html (accessed on 1 January 2023).
- GIS Development Team. QGIS Geographic Information System. Open Source Geospatial Foundation Project. Available online: http://qgis.osgeo.org (accessed on 1 January 2023).
- ESRI. ArcGIS Desktop: Release 10.7; Environmental Systems Research Institute: Redlands, CA, USA, 2011. [Google Scholar]
- Padró, J.-C.; Cardozo, J.; Montero, P.; Ruiz-Carulla, R.; Alcañiz, J.M.; Serra, D.; Carabassa, V. Drone-Based Identification of Erosive Processes in Open-Pit Mining Restored Areas. Land 2022, 11, 212. [Google Scholar] [CrossRef]
- Carabassa, V.; Montero, P.; Alcañiz, J.M.; Padró, J.-C. Soil Erosion Monitoring in Quarry Restoration Using Drones. Minerals 2021, 11, 949. [Google Scholar] [CrossRef]
- Chuvieco, E. Teledetección Ambiental: La Observación de la Tierra Desde el Espacio, 3rd ed.; Ariel: Madrid, Spain, 2010; p. 592. [Google Scholar]
- Shahriari, H.; Honarmand, M.; Mirzaei, S.; Padró, J.-C. Application of UAV photogrammetry products for the exploration of dimension stone deposits: A case study of the Majestic Rose quarry, Kerman province, Iran. Arab. J. Geosci. 2022, 15, 1650–1666. [Google Scholar] [CrossRef]
- Padró, J.-C.; Muñoz, F.-J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. IJAEO 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Gencat. Activitats extractives. Expedients amb les àrees d’afecció de les Activitats Extractives a Catalunya a febrer de. 2014. Available online: https://sig.gencat.cat/visors/hipermapa.html (accessed on 1 January 2023).
- Institut Cartogràfic i Geològic de Catalunya Mapa geològic comarcal 1:50.000. Available online: https://www.icgc.cat/Administracio-i-empresa/Descarregues/Cartografia-geologica-i-geotematica/Cartografia-geologica/Mapa-geologic-comarcal-1-50.000 (accessed on 1 January 2023).
- Open ICGC. Connector QGIS Open ICGC. Available online: https://www.icgc.cat/en/Downloads/Open-ICGC-plugin (accessed on 1 January 2023).
- DJI. Phantom 4 Pro. Available online: https://www.dji.com/es/phantom-4-pro (accessed on 1 January 2023).
- Institut Cartogràfic i Geològic de Catalunya. Dades LIDAR. 2016. Available online: https://www.icgc.cat/Descarregues/Elevacions/Dades-lidar (accessed on 1 January 2023).
- Graham, L. The LAS 1.4 Specification. PERS 2012, 78, 93–102. Available online: https://www.asprs.org/wp-content/uploads/2010/12/LAS_Specification.pdf (accessed on 1 January 2023).
- LAStools. “Efficient LiDAR Processing Software” (Version 141017, Academic). Available online: http://rapidlasso.com/LAStools (accessed on 1 January 2023).
- Agisoft LLC. Agisoft PhotoScan User Manual Professional Edition, Version 1.4. Available online: https://www.agisoft.com/pdf/photoscan-pro_1_4_en.pdf (accessed on 1 January 2023).
- Padró, J.-C.; Carabassa, V.; Balagué, J.; Brotons, L.; Alcañiz, J.M.; Pons, X. Monitoring opencast mine restorations using Unmanned Aerial System (UAS) imagery. STOTEN 2019, 657, 1602–1614. [Google Scholar] [CrossRef] [PubMed]
- Padró, J.-C.; Muñoz, F.-J.; Ávila, L.; Pesquer, L.; Pons, X. Radiometric Correction of Landsat-8 and Sentinel-2A Scenes Using Drone Imagery in Synergy with Field Spectroradiometry. Remote Sens. 2018, 10, 1687. [Google Scholar] [CrossRef]
- Carabassa, V.; Montero, P.; Crespo, M.; Padró, J.C.; Pons, X.; Balagué, J.; Brotons, L.; Alcañiz, J.M. Unmanned aerial system protocol for quarry restoration and mineral extraction monitoring. JEMA 2020, 270, 110717. [Google Scholar] [CrossRef] [PubMed]
- Jaramillo Baltra, R.; Padró, J.-C. Generación de cartografía a partir de imágenes captadas con dron de ala fija, asociada a proyectos hidráulicos fluviales. Int. Rev. Geogr. Inf. Sci. Technol. 2020, 26, 93–117. [Google Scholar] [CrossRef]
- Jenson, S.K.; Domingue, J.O. Extracting topographic structure from digital elevation data for geographic information-system analysis. PE&RS 1988, 54, 1593–1600, USGS Publications Warehouse. [Google Scholar]
- Rotnicka, J.; Dłużewski, M.; Dąbski, M.; Rodzewicz, M.; Włodarski, W.; Zmarz, A. Accuracy of the UAV-Based DEM of Beach–Foredune Topography in Relation to Selected Morphometric Variables, Land Cover, and Multitemporal Sediment Budget. Estuaries Coasts 2020, 43, 1939–1955. [Google Scholar] [CrossRef]
- Lindner, G.; Schraml, K.; Mansberger, R.; Hübl, J. UAV monitoring and documentation of a large landslide. Appl. Geomat. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Carabassa, V.; Ortiz, O.; Alcañiz, J.M. RESTOQUARRY: Indicators for self-evaluation of ecological restoration in open-pit mines. Ecol. Indic. 2019, 102, 437–445. [Google Scholar] [CrossRef]
- Strahler, A.N. Quantitative analysis of watershed geomorphology. Eos Trans. AGU 1957, 38, 913–920. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Width | 5472 px |  |
| High | 3648 px | |
| Resolution | 20 mpx | |
| Bands | R,G,B | |
| Focal | f/2.8–11 |
| Classes m3 | Area m2 | Volume m3 | ||
|---|---|---|---|---|
| 0 | 209.97 | 209.97 | 0.00 | 0.00 |
| 0–0.05 | 10,401.93 | Total landfill area 32,140.49 | 12,546.50 | Total backfill volume 124,941.22 |
| 0.05–0.10 | 10,391.96 | 34,645.90 | ||
| 0.10–0.15 | 5862.53 | 31,384.08 | ||
| 0.15–0.20 | 3857.92 | 29,642.78 | ||
| 0.20–0.25 | 1226.48 | 11,887.03 | ||
| 0.25–0.30 | 399.67 | 4834.93 | ||
| Type | Area (m2) | Percentage (%) |
|---|---|---|
| Visible | 8,642,592 m2 | 17 |
| Not visible | 41,621,176 m2 | 83 |
| Total | 50,263,768 m2 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Russell, E.; Padró, J.-C.; Montero, P.; Domingo-Marimon, C.; Carabassa, V. Relief Modeling in the Restoration of Extractive Activities Using Drone Imagery. Sensors 2023, 23, 2097. https://doi.org/10.3390/s23042097
Russell E, Padró J-C, Montero P, Domingo-Marimon C, Carabassa V. Relief Modeling in the Restoration of Extractive Activities Using Drone Imagery. Sensors. 2023; 23(4):2097. https://doi.org/10.3390/s23042097
Chicago/Turabian StyleRussell, Erick, Joan-Cristian Padró, Pau Montero, Cristina Domingo-Marimon, and Vicenç Carabassa. 2023. "Relief Modeling in the Restoration of Extractive Activities Using Drone Imagery" Sensors 23, no. 4: 2097. https://doi.org/10.3390/s23042097
APA StyleRussell, E., Padró, J.-C., Montero, P., Domingo-Marimon, C., & Carabassa, V. (2023). Relief Modeling in the Restoration of Extractive Activities Using Drone Imagery. Sensors, 23(4), 2097. https://doi.org/10.3390/s23042097