Movement Prototypes in a Complex Teamgym Gymnastics Technique on the Vaulting Table and Their Relationship with Judges’ Scores

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Task
2.3. Instruments and Procedure
2.4. Data Analysis
2.4.1. Statistical Procedures
2.4.2. Statistical Validation
3. Results
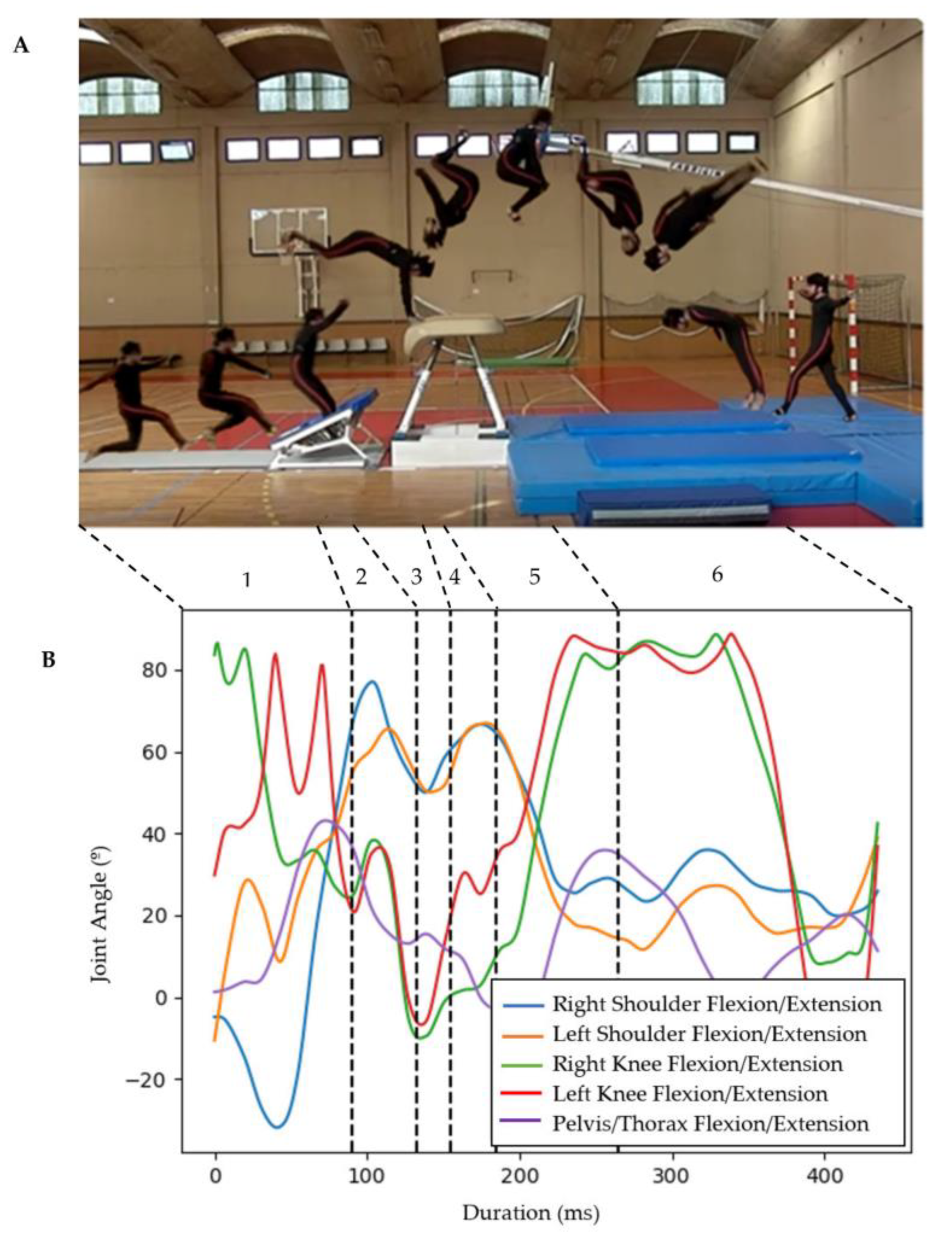
3.1. Handspring Tucked Somersault with a Half Twist—Global Analysis
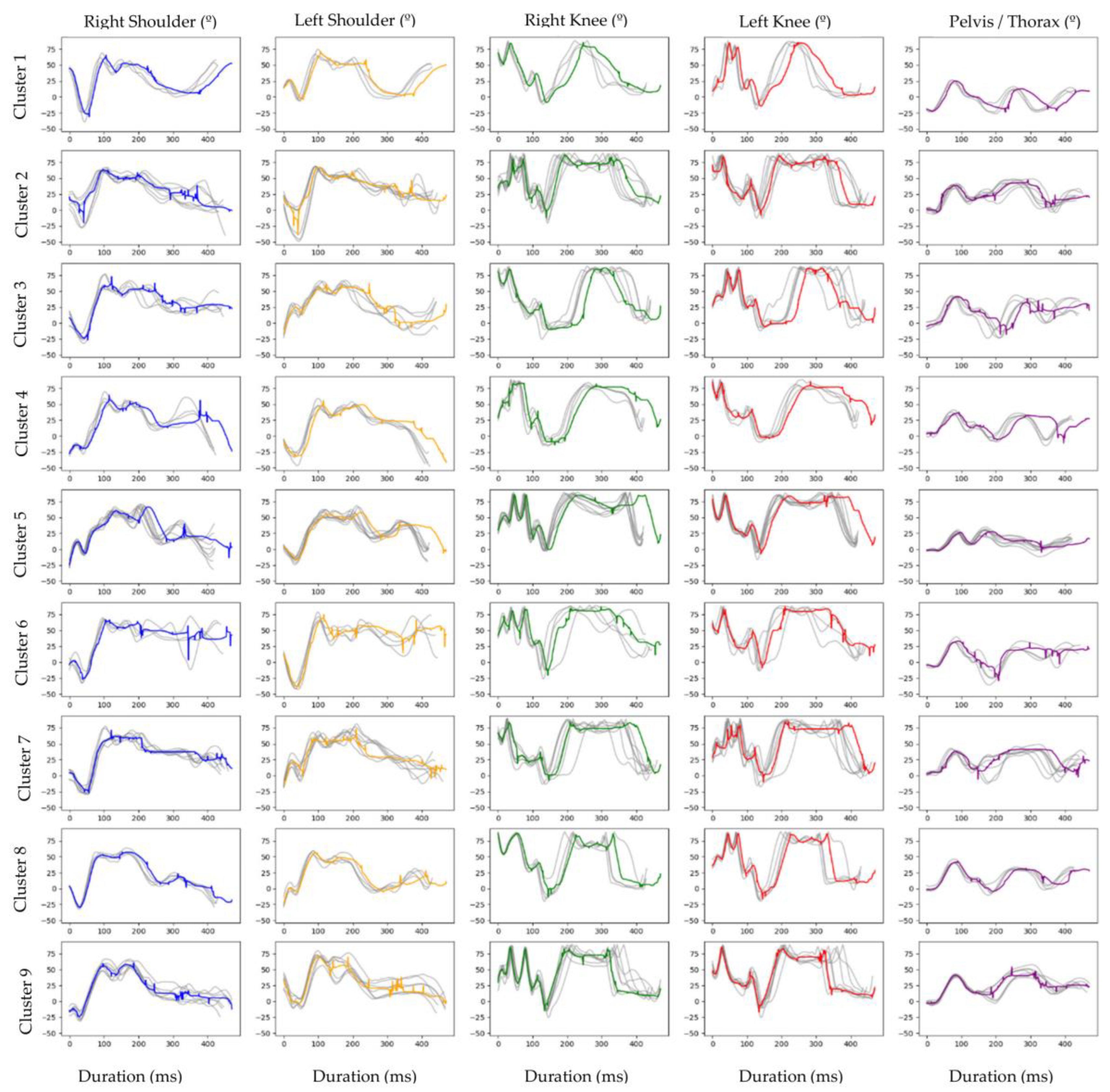
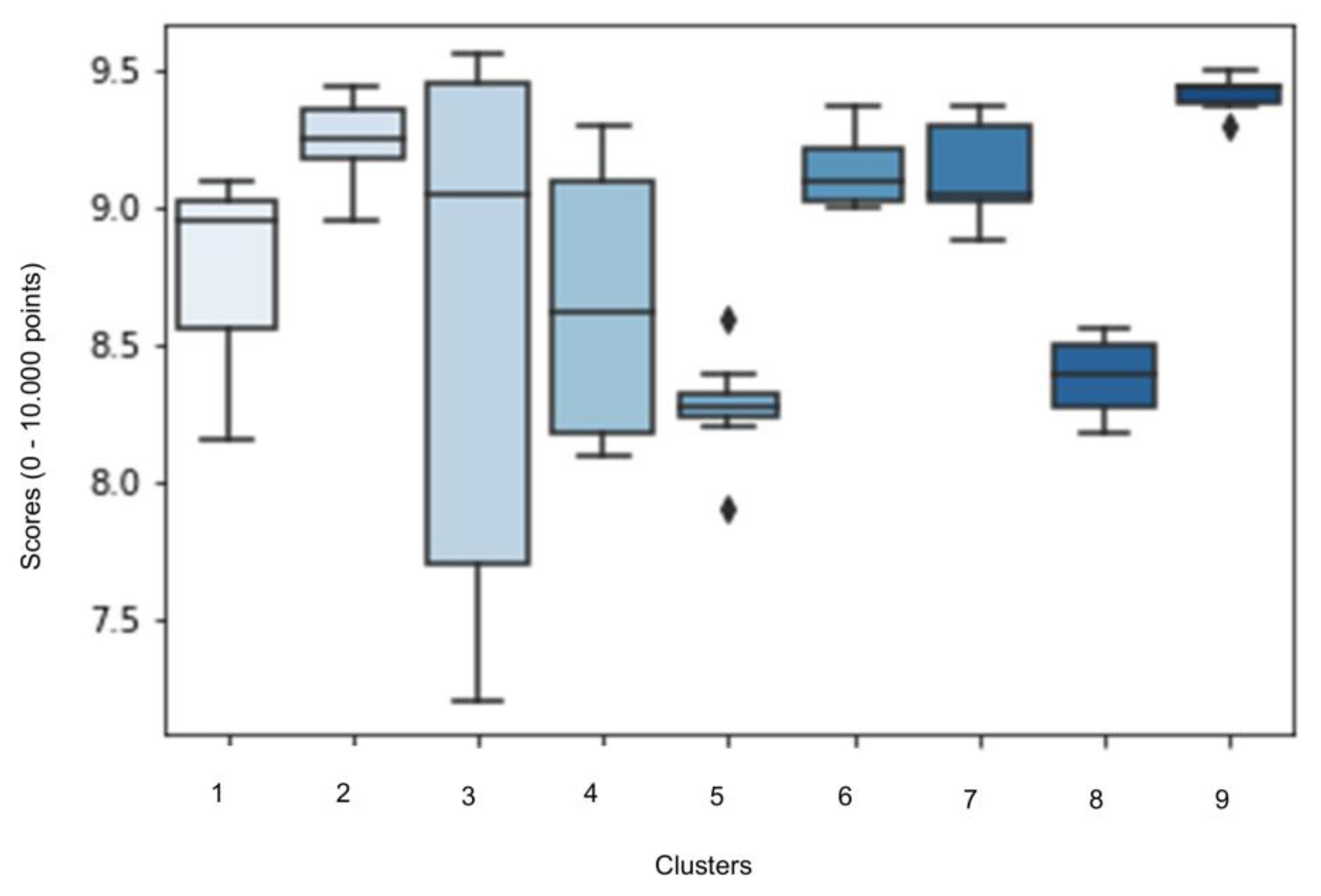
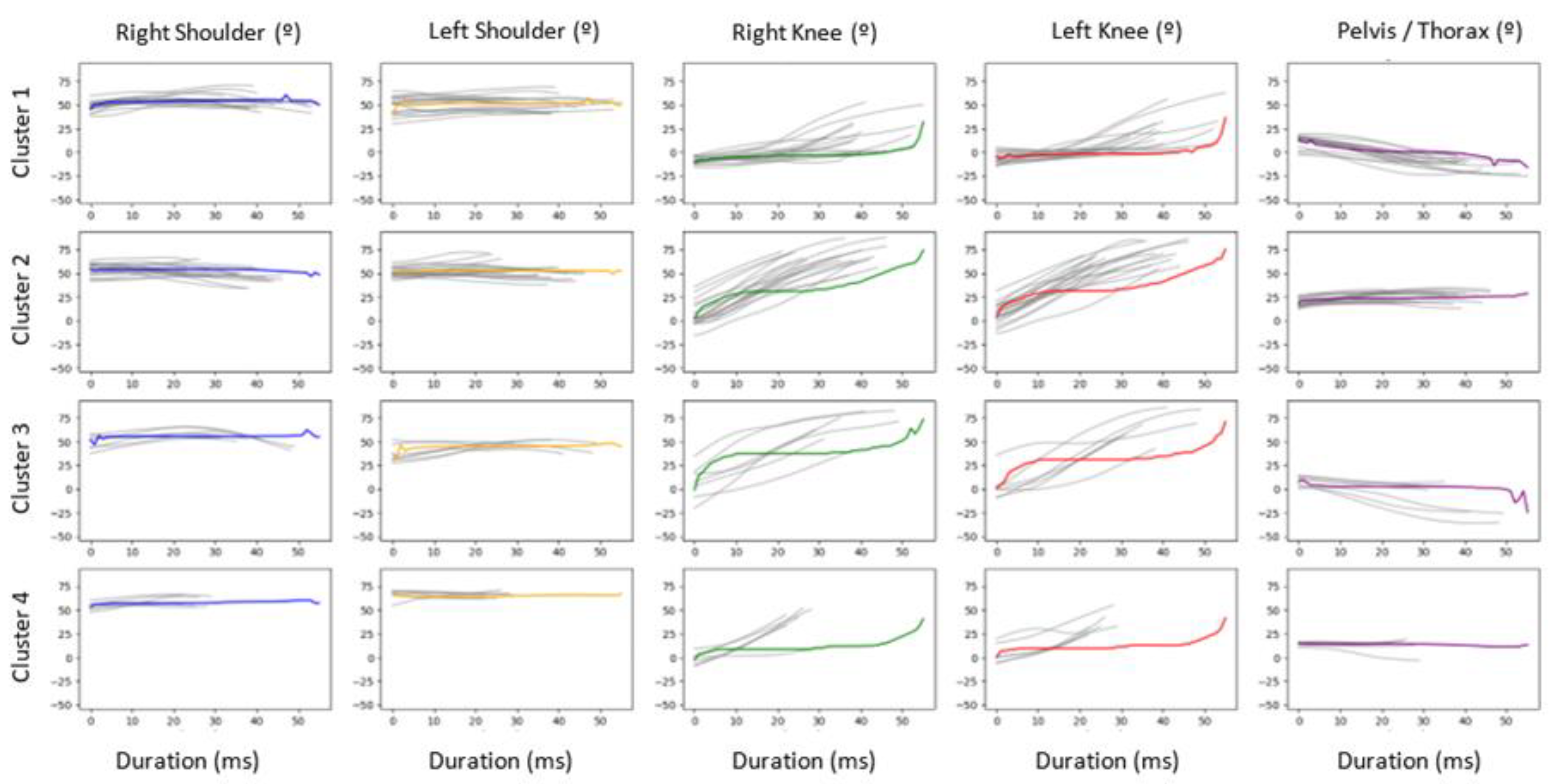
3.2. Handspring Tucked Somersault with a Half Twist—Phases Analysis
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schmidt, R.; Lee, T. Motor Learning and Performance, 6th ed; Human Kinetics Publishers: Champaign, IL, USA, 2020. [Google Scholar]
- Araújo, D.; Woods, C.; McCosker, C.; Carvalho, J.; Renshaw, I.; Davids, K. Functional Variability Enhances Performance in Self-paced Tasks: An Ecological Dynamics Approach. In The Psychology of Closed Self-Paced Motor Tasks in Sports; Routledge: New York, NY, USA, 2022. [Google Scholar]
- Heinen, T.; Jeraj, D.; Thoeren, M.; Vinken, P. Target-directed running in gymnastics: The role of the springboard position as an informational source to regulate handsprings on vault. Biol. Sport 2011, 28, 215–221. [Google Scholar] [CrossRef] [Green Version]
- Bradshaw, E. Gymnastics: Target-directed running in gymnastics: A preliminary exploration of vaulting. Sports Biomech. 2004, 3, 125–144. [Google Scholar] [CrossRef]
- Davids, K.; Araújo, D.; Seifert, L.; Oth, D. Expert Performance in Sport-An ecological dynamics perspective. In Rotledge Handbook of Sport Expertise; Baker, J., Farrow, D., Eds.; Routledge: New York, NY, USA, 2015; pp. 130–144. [Google Scholar]
- Davids, K.; Araújo, D.; Hristovski, R.; Passos, P.; Chow, J.Y. Ecological dynamics and motor learning design in sport. Ski. Acquis. Sport 2012, 25, 112–130. [Google Scholar]
- Headrick, J.; Renshaw, I.; Davids, K.; Pinder, R.A.; Araújo, D. The dynamics of expertise acquisition in sport: The role of affective learning design. Psychol. Sport Exerc. 2015, 16, 83–90. [Google Scholar] [CrossRef] [Green Version]
- Davids, K.; Araújo, D.; Vilar, L.; Renshaw, I.; Pinder, R. An ecological dynamics approach to skill acquisition: Implications for development of talent in sport. Talent. Dev. Excell. 2013, 5, 21–34. [Google Scholar]
- Newell, K. Constraints on the Development of Coordination. In Motor Development in Children: Aspects of Co-Ordination and Control; Newell, M.M., Ed.; Martinus Nijhoff: Dordrecht, The Netherlands, 1986; pp. 341–360. [Google Scholar]
- Harbourne, R.T.; Stergiou, N. Movement Variability and the Use of Nonlinear Tools: Principles to Guide Physical Therapist Practice. Phys. Ther. 2009, 89, 267–282. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.; Zhang, Z.; Wen, H. Intra-Subject and Inter-Subject Movement Variability Quantified with Muscle Synergies in Upper-Limb Reaching Movements. Biomimetics 2021, 6, 63. [Google Scholar] [CrossRef] [PubMed]
- Kochanowicz, A.; Niespodziński, B.; Marina, M.; Mieszkowski, J.; Biskup, L.; Kochanowicz, K. Relationship between postural control and muscle activity during a handstand in young and adult gymnasts. Hum. Mov. Sci. 2018, 58, 195–204. [Google Scholar] [CrossRef] [PubMed]
- Irwin, G.; Kerwin, D.G. The influence of the vaulting table on the handspring front somersault. Sports Biomech. 2009, 8, 114–128. [Google Scholar] [CrossRef] [PubMed]
- Bradshaw, E.; Hume, P.; Calton, M.; Aisbett, B. Reliability and variability of day-to-day vault training measures in artistic gymnastics. Sports Biomech. 2010, 9, 79–97. [Google Scholar] [CrossRef]
- Haigis, T.; Schlegel, K. The regulatory influence of the visual system: An exploratory study in gymnastics vaulting. Sci. Gymnast. J. 2020, 12, 61–73. [Google Scholar] [CrossRef]
- Heinen, T.; Vinken, P.M.; Jeraj, D.; Velentzas, K. Movement Regulation of Handsprings on Vault. Res. Q. Exerc. Sport 2013, 84, 68–78. [Google Scholar] [CrossRef] [PubMed]
- Sjöstrand, P. 2022–2024 Teamgym Code of Points Seniors and Juniors; European Gymnastics: Lausanne, Switzerland, 2022; Available online: https://backend.europeangymnastics.com/sites/default/files/paragraph/document/2022TeamGymCodeofPoints.pdf (accessed on 30 December 2022).
- Schollhorn, W.; Chow, J.; Glazier, P.; Button, C. Self-Organizing Maps and Cluster Analysis in Elite and Sub-Elite Athletic Performance. In Complex Systems in Sport; Routledge: New York, NY, USA, 2014; pp. 145–159. [Google Scholar]
- Davids, K.; Hristovski, R.; Araújo, D.; Balagué Serre, N.; Button, C.; Passos, P. Complex systems in Sport; Routledge: New York, NY, USA, 2014. [Google Scholar]
- Hughes, K.; Lemmetty, H.; Sjostrand, P.; Dvoracek, R.; Gryga, P. Directives for Equipment (European Union of Gymnastics). 2013. Available online: https://www.british-gymnastics.org/technical-information/discipline-updates/teamgym/4298-2013-2016-teamgym-equipment-directives/file (accessed on 1 April 2022).
- Barreto, J.; Peixoto, C.; Cabral, S.; Williams, A.; Casanova, F.; Pedro, B.; Veloso, A. Concurrent Validation of 3D Joint Angles during Gymnastics Techniques Using Inertial Measurement Units. Electronics 2021, 10, 1251. [Google Scholar] [CrossRef]
- Mo, S.; Chow, D.H. Accuracy of three methods in gait event detection during overground running. Gait Posture 2018, 59, 93–98. [Google Scholar] [CrossRef]
- Petitjean, F.; Ketterlin, A.; Gancarski, P. A global averaging method for dynamic time warping, with applications to clustering. Pattern Recognit. 2011, 44, 678–693. [Google Scholar] [CrossRef]
- Keogh, E.J.; Pazzani, M.J. Scaling up Dynamic Time Warping for Datamining Applications. Proceedings of Sixth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Irvine, CA, USA, 20–23 August 2000. [Google Scholar] [CrossRef] [Green Version]
- Petitjean, F.; Forestier, G.; Webb, G.I.; Nicholson, A.E.; Chen, Y.; Keogh, E. Dynamic Time Warping Averaging of Time Series Allows Faster and More Accurate Classification. In Proceedings of the 2014 IEEE International Conference on Data Mining, Shenzhen, China, 14–17 December 2014. [Google Scholar] [CrossRef] [Green Version]
- Barth, J. Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors 2015, 15, 6419–6440. [Google Scholar] [CrossRef] [Green Version]
- Adistambha, K.; Ritz, C.H.; Burnett, I.S. Motion Classification Using Dynamic Time Warping. In Proceedings of the 2008 IEEE 10th Workshop on Multimedia Signal Processing, Cairns, QLD, Australia, 8–10 October 2008. [Google Scholar] [CrossRef] [Green Version]
- Bruineberg, J.; Seifert, L.; Rietveld, E.; Kiverstein, J. Metastable attunement and real-life skilled behavior. Synthese 2021, 199, 12819–12842. [Google Scholar] [CrossRef]
- Mack, M.; Federbusch, S.; Ferber, M.; Heinen, T. Movement prototypes and their relationship in the performance of a gymnastics floor routine. J. Hum. Sport Exerc. 2020, 15. [Google Scholar] [CrossRef] [Green Version]
- Araújo, D.; Davids, K.; Chow, J.; Passos, P.; Raab, M. The development of decision making skill in sport: An ecological dynamics perspective BT-Perspectives on Cognition and Action in Sport. In Perspectives on Cognition and Action in Sport; Nova Science Publishers: Hauppauge, NY, USA, 2009; pp. 157–169. Available online: http://eprints.qut.edu.au/28514%5Cnfile:///Users/tehrandavis/Dropbox/Papers2/Files/Ara?jo2009_The_development_of_decision_making_skill_in_sport_An_ecological_dynamics_perspective.pdf%5Cnpapers2://publication/uuid/D95EDAD5-F932-4CA9-822B-38C8B20C29C5 (accessed on 30 December 2022).
- Araújo, D.; Hristovski, R.; Seifert, L.; Carvalho, J.; Davids, K. Ecological cognition: Expert decision-making behaviour in sport. Int. Rev. Sport Exerc. Psychol. 2017, 12, 1–25. [Google Scholar] [CrossRef]
- Seifert, L.; Button, C.; Davids, K. Key Properties of Expert Movement Systems in Sport. Sports Med. 2012, 43, 167–178. [Google Scholar] [CrossRef]
- Stergiou, N.; Harbourne, R.T.; Cavanaugh, J.T. Optimal Movement Variability: A New Theoretical Perspective for Neurologic Physical Therapy. J. Neurol. Phys. Ther. 2006, 30, 120–129. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Farana, R.; Vaverka, F. The effect of biomechanical variables on the assessment of vaulting in top-level artistic female gymnasts in world cup competitions. Acta Gymnica 2012, 42, 49–57. Available online: https://www.scopus.com/inward/record.uri?eid=2-s2.0-84874300176&partnerID=40&md5=1c6df47fe1d4de01bf373e242ecb5ebd (accessed on 15 April 2022). [CrossRef] [Green Version]
- Kochanowicz, A.; Kochanowicz, K.; Niespodziúski, B.; Mieszkowski, J.; Aschenbrenner, P.; Bielec, G.; Szark-Eckardt, M. Maximal Power of the Lower Limbs of Youth Gymnasts and Biomechanical Indicators of the Forward Handspring Vault Versus the Sports Result. J. Hum. Kinet. 2016, 53, 33–40. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fernandes, S.M.B.; Carrara, P.; Serrão, J.C.; Amadio, A.C.; Mochizuki, L. Kinematic variables of table vault on artistic gymnastics. Rev. Bras. Educ. Física Esporte 2016, 30, 97–107. [Google Scholar] [CrossRef] [Green Version]
- Prassas, S.; Kwon, Y.H.; Sands, W.A. Biomechanical research in artistic gymnastics: A review. Sports Biomech. 2006, 5, 261–291. [Google Scholar] [CrossRef]
- Schärer, C.; Lehmann, T.; Naundorf, F.; Taube, W.; Hübner, K. The faster, the better? Relationships between run-up speed, the degree of difficulty (D-score), height and length of flight on vault in artistic gymnastics. PLoS ONE 2019, 14, e0213310. [Google Scholar] [CrossRef]
- Atiković, A.; Kazazović, E.; Kamanješavić, E.; Mujanović, A.N. Estimation correlation of biome-chanical parameters and vault start value in men’ s artistic gymnastics. Sport Sci. Pract. Asp.-Int. Sci. J. Kinesiol. 2019, 16, 25–30. [Google Scholar]
- Schärer, C.; Haller, N.; Taube, W.; Hübner, K. Physical determinants of vault performance and their age-related differences across male junior and elite top-level gymnasts. PLoS ONE 2019, 14, e0225975. [Google Scholar] [CrossRef]
- Barreto, J.; Casanova, F.; Peixoto, C.; Fawver, B.; Williams, A. How Task Constraints Influence the Gaze and Motor Behaviours of Elite-Level Gymnasts. Int. J. Environ. Res. Public Health 2021, 18, 6941. [Google Scholar] [CrossRef]
- Hiley, M.J.; Jackson, M.I.; Yeadon, M.R. Optimal technique for maximal forward rotating vaults in men’s gymnastics. Hum. Mov. Sci. 2015, 42, 117–131. [Google Scholar] [CrossRef] [Green Version]
- Atiković, A. New Regression Models to Evaluate the Relationship between Biomechanics of Gymnastic Vault and Initial Vault Difficulty Values. J. Hum. Kinet. 2012, 35, 119–126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Takei, Y. Three-dimensional analysis of handspring with full turn vault: Deterministic model, coaches’ beliefs, and judges’ scores. J. Appl. Biomech. 1998, 14, 190–210. [Google Scholar] [CrossRef]
- Veličković, S.; Petković, D.; Petković, E. A case study about differences in characteristics of the run-up approach on the vault between top-class and middle-class. Sci. Gymnast. J. 2011, 3, 25–34. [Google Scholar]
- Renshaw, I.; Davids, K.; Newcombe, D.; Roberts, W. A Theoretical Basis for a Constraints-Lead Approach. In The Constraints-Led Approach: Principles for Sports Coaching and Practice Design; Routledge: New York, NY, USA, 2019. [Google Scholar]
- Ramos, A.; Afonso, J.; Coutinho, P.; Bessa, C.; Farias, C.; Mesquita, I. Appropriateness-Based Activities: Reaching Out to Every Learner. In Learner-Oriented Teaching and Assessment in Youth Sport; Routledge: Porto, Portugal, 2022. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barreto, J.; Henriques, R.; Cabral, S.; Pedro, B.; Peixoto, C.; Veloso, A. Movement Prototypes in a Complex Teamgym Gymnastics Technique on the Vaulting Table and Their Relationship with Judges’ Scores. Sensors 2023, 23, 3240. https://doi.org/10.3390/s23063240
Barreto J, Henriques R, Cabral S, Pedro B, Peixoto C, Veloso A. Movement Prototypes in a Complex Teamgym Gymnastics Technique on the Vaulting Table and Their Relationship with Judges’ Scores. Sensors. 2023; 23(6):3240. https://doi.org/10.3390/s23063240
Chicago/Turabian StyleBarreto, Joana, Rui Henriques, Sílvia Cabral, Bruno Pedro, César Peixoto, and António Veloso. 2023. "Movement Prototypes in a Complex Teamgym Gymnastics Technique on the Vaulting Table and Their Relationship with Judges’ Scores" Sensors 23, no. 6: 3240. https://doi.org/10.3390/s23063240
APA StyleBarreto, J., Henriques, R., Cabral, S., Pedro, B., Peixoto, C., & Veloso, A. (2023). Movement Prototypes in a Complex Teamgym Gymnastics Technique on the Vaulting Table and Their Relationship with Judges’ Scores. Sensors, 23(6), 3240. https://doi.org/10.3390/s23063240