1. Introduction
Gravity is a resultant force of gravitation and inertial centrifugal force. Absolute gravity measurement has been widely practiced in various fields such as basic physical research, inertial navigation, underwater exploration, mining, resource exploration, environmental monitoring, marine development, earthquake prediction, and global gravity field mapping [
1,
2,
3,
4]. Presently, most high-precision absolute gravimeters rely on the free-fall method for an absolute gravity measurement. For instance, a laser interferometry absolute gravimeter (hereinafter referred to as an optical gravimeter) uses a cube-corner prism as the falling object [
5,
6], and an atomic interferometry absolute gravimeter (hereinafter referred to as an atomic gravimeter) takes a cold atomic group as the falling object [
7,
8]. The gravimeters are both employed to measure the acceleration of the falling object or atomic group against an internal reference mirror (that is, a cube-corner prism or a plane mirror). In the principle of equivalence, it is impossible for a gravimeter to identify the gravitational acceleration from the acceleration of vibration-induced noise resulting from the external environment. Consequently, the reference mirror is highly sensitive to the external vibration-induced noise. The vibration-induced noise will inevitably exert an effect on the measurement, leading to the measurement error of the gravimeter. As revealed in some test results, an accurate gravity measurement is not easily implemented if the vibration-induced noise is not inhibited [
9].
Vertical vibration isolation and vibration compensation are two approaches predominantly adopted to cope with the vibration-induced noise in the absolute gravity measurement. Ultralow frequency vertical vibration isolation is a technology that has existed for a long time. Till today, it has been able to isolate the vibration up to µGal, and satisfy the need for a high-precision absolute gravity measurement. Nevertheless, a vertical vibration isolation system is often used for the absolute gravity measurement on the static ground in a quiet environment such as laboratories because of its poor anti-interference. For instance, a test team of the Laboratoire National de Metrologie et d’Essais-Systemes de Reference Temps-Espace (LNE-SYRTE) [
10], a research team from the Stanford University [
11], Feier from the Humboldt–Universitat zu Berlin [
12], Zhou Minkang from the Huazhong University of Science [
13,
14] and Technology, and Tang Biao from the Chinese Academy of Sciences [
15]. At the end of the 20th century, vibration compensation was put forth to detect the vibration-induced noise of a reference mirror inside a gravimeter using a sensor, such as a seismometer or an accelerometer, and then correct the measured gravity accordingly. The vibration compensation with a seismometer in a laboratory had been achieved by some research teams from the Observatoire de Paris [
16], the Universität Hannover [
17], the National Institute of Metrology, China [
18], the Tsinghua University [
19], and the Zhejiang University [
9]. After vibration compensation, the standard deviation of each measurement reached dozens or hundreds of µGal. Moreover, the compensation vibration with an accelerometer outdoors or on a mobile platform had been practiced by some research institutes such as the Swiss Federal Institute of Technology Zurich [
20], the ONERA [
21,
22,
23], the Zhejiang University of Technology [
24], and the Huazhong University of Science and Technology [
25]. After compensation vibration, the standard deviation of each measurement was up to mGal. Evidently, the existing vibration compensation systems can achieve accuracy up to mGal to dozens of µGal, which is inferior to a vertical vibration isolation system. However, a vibration compensation system features a simple structure and offers greater anti-interference. If a measurement is carried out outside a laboratory or in a field, that is, a dynamic environment, instead of a static environment, the supporting platform of the gravimeter will be changed and will even start to move. The measurement environment will deteriorate in various aspects, e.g., an increased amplitude of vibration-induced noise and a widened platform. In this case, vertical vibration isolation must be changed to vibration compensation since the latter has approximately the same measurement accuracy but a better performance in a dynamic environment.
Nevertheless, these studies focus on a direct compensation and they overlook the influence of the transfer function between a sensor and a reference mirror. Richardson [
17] pointed out that the mechanical transfer function between a reference mirror and a traditional vibration sensor originates from the installation location and mechanical structure. Prior to measurement, it is therefore necessary to initially define the transfer function for better vibration compensation. In 1997, Canuteson et al. [
26] employed an absolute gravimeter to define the transfer function of an STS-2 seismometer, and they found it possible to correct the ground noise with a seismometer. Nevertheless, the transfer function of a seismometer may be easily altered by the changing environment or the drift of an instrument, which leads to complex compensation and unsatisfying results. In 2001, Brown et al. [
27] put forward a vibration compensation approach in which the information from an external sensor was used for compensation to gather the data of absolute gravity. In the approach, the vibration isolation system of an optical gravimeter FG5 was replaced by a vibration compensation system. The results of static measurement in a laboratory environment showed that this vibration compensation system enhanced the measurement accuracy by around seven times, from ±500 μGal to ±65 μGal; its effect was quite satisfying. In 2017, Wang et al. [
18] carried out a theoretical analysis on how the output signal of a gravimeter sensor related to the motion of a reference mirror and estimated the transfer function for such a relation. Furthermore, the transfer function was simplified into a “gain-delay” model after considering the flat response of such a transfer function within the bandwidth of the seismometer, the arrangement of the reference mirror adjacent to the sensor, and the gain drift under the environmental effects. The delay and gain were subsequently solved by virtue of correlation analysis and traversal. On this basis, Qian et al. [
19] proposed to solve the gain and delay using a two-dimensional golden section method in 2018, which is essentially a traversal method. However, this method considerably reduced computation, shortened the duration of vibration compensation, and enhanced the computational efficiency while guaranteeing the same effect of vibration compensation as achieved by the approach taken by Wang et al. In 2022, Yao et al. [
28] applied the simplified model of transfer function in the vibration compensation for an atomic gravimeter for the first time, and corrected the interference fringe of the atomic gravimeter. In a quiet laboratory, this approach could make the standard deviation of the cosine fitting residual error of the interference fringe attenuate by 58%. Nevertheless, it has not been further tested in a complex vibration environment.
Inspired by the above studies, we propose a vibration compensation approach in this paper to correct the interference fringe of an atomic gravimeter. Based on EO, it allows estimating the simplified model of the transfer function for a reference mirror. The approach is applicable to an atomic gravimeter in a complex vibration environment. As a novel meta heuristic optimization algorithm put forth by Faramarzi et al. in 2019 [
29], the EO algorithm can simulate the concentration of inactive matters that enter, leave, or are generated based on the state of dynamic mass balance in a control volume. Among them, each particle with its concentration acts as a search agent and represents a solution for an optimization problem. In this paper, the transfer function between a Raman reflector and a seismometer in an atomic gravimeter is simplified into a “gain-delay” model. The RMSE in the fitting of an atomic interference fringe after the vibration compensation is taken as the fitness and estimated with the EO algorithm, so as to restore the actual vibration of the Raman reflector. Vibration compensation is adopted to minimize the effect of vibration on the gravity measurement and improve the accuracy of the gravity measurement.
This paper is structured as follows: The second part describes the principles of an atomic gravimeter, the basic principles of the simplified model of transfer function, and the method of vibration compensation through the estimation of transfer function. The test environment and equipment and vibration compensation process are detailed in the third part. The fourth part presents the test with a single vibration compensation and 50 vibration compensations, and compares vibration compensation with a genetic algorithm and particle swarm optimization. The test results are listed and analyzed. The fifth part gives the conclusions and lays out the future optimization of vibration compensation.
3. Test
3.1. Environment and Equipment
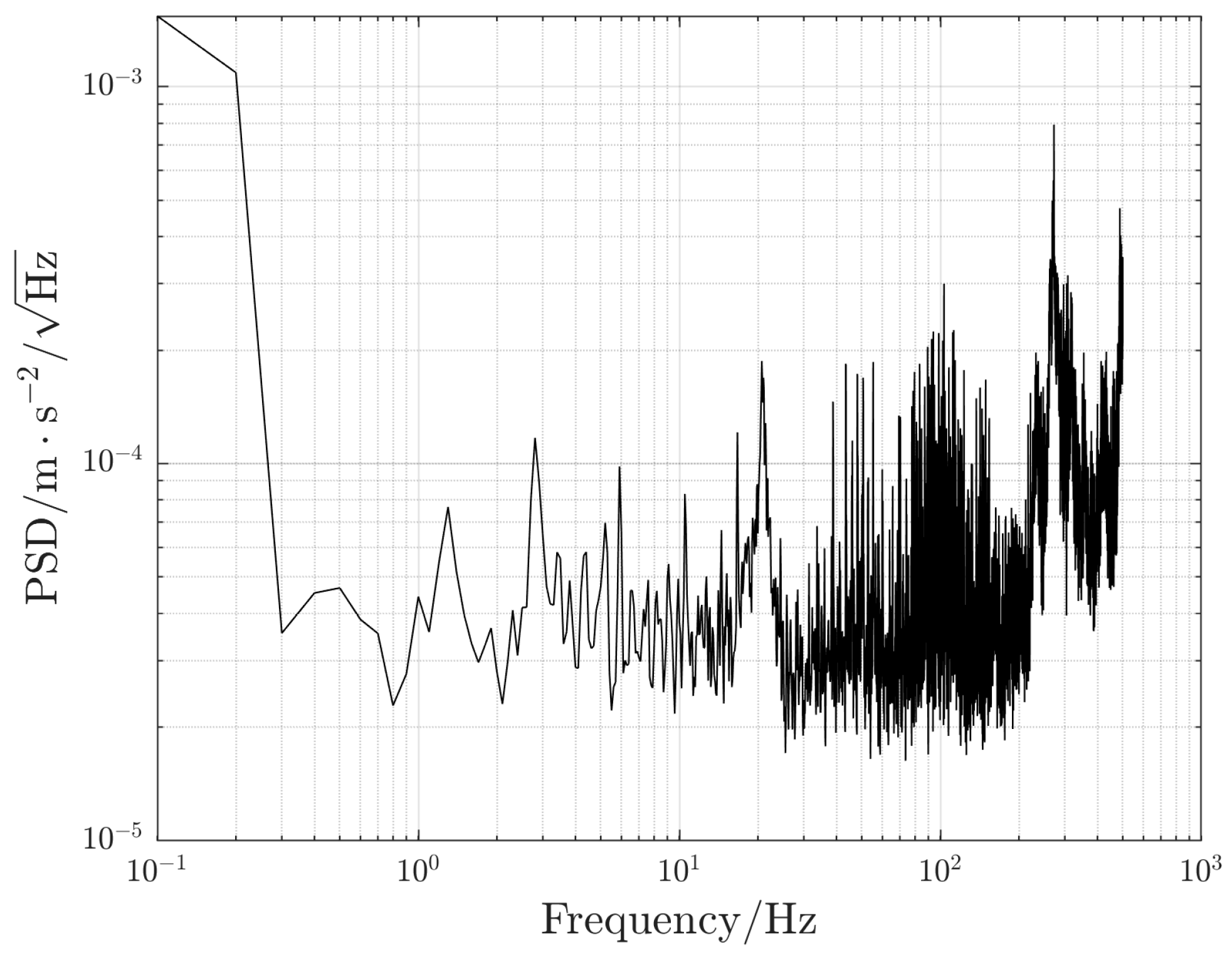
The vibration compensation verification test was carried out in a laboratory in a crowded downtown. The laboratory was on the fourth floor where people often walked around, causing much vibration-induced noise. The complex vibration environment caused an amplitude increase in vibration-induced noise and broadened the frequency band. During the test, equipment was not placed on a vibration isolation platform. The power spectrum density of the floor vibration acceleration was measured as shown in
Figure 3. The vibration-induced noise reached the level
. The seismometer (CMG-3VL, Güralp Systems Limited., UK) used to measure the vibration signal was a single-axis (only to measure the vibration signal in the vertical direction), low-noise, and broadband ground vibration sensor. It could measure the vibration within the frequency range of 0.003–50 Hz. Its sensitivity was up to 2050
, and its noise level was as low as
. Gravity was measured by a WAG atomic gravimeter developed by the Innovation Academy for Precision Measurement Science and Technology, Chinese Academy of Sciences [
34]. Its sensitivity was
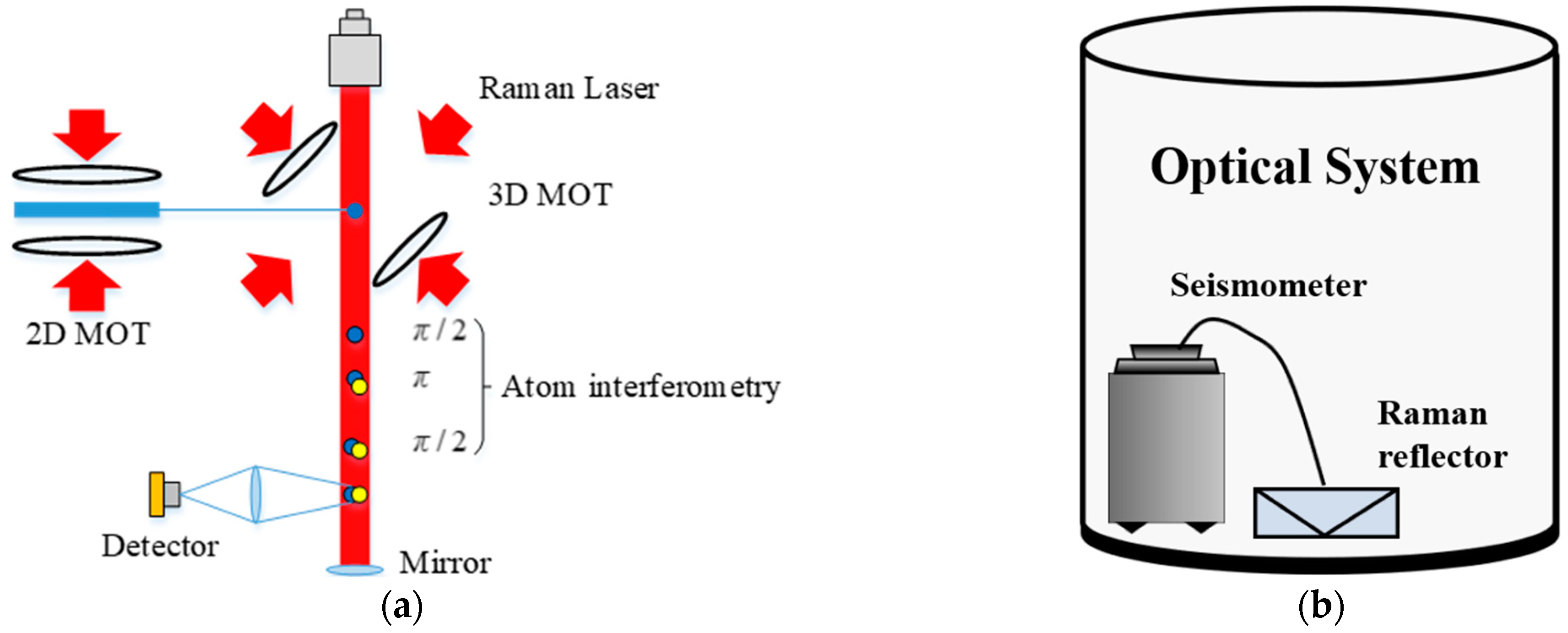
, and its long-term stability reached 5.5 μGal. In the interference process of the atomic gravimeter’s optical system, as shown in
Figure 4a, the laser wavelength of the atomic gravimeter was around 780 nm, and the time interval
T of the Raman pulses was set to 71 ms. An interference fringe was obtained through the linear scanning of the chirp rate. At the middle of the fringe, linear chirp scanning was carried out for Raman detuning. A complete chirp scanning period consisted of 40 atomic interferences, with the first half for positive chirp scanning and the second half for negative chirp scanning. The position of the Raman reflector and the seismometer in the optical system is presented in
Figure 4b. The Raman reflector was placed right beneath the interference loop and was suspended in the same direction as the vertical vibration measured by the seismometer. The seismometer is also embedded into the optical system and attached to the centerline of the platform for adjusting the level at the bottom. It is then linked to the Raman reflector through a customized structure so as to respond to the vibration of the reflector in an accurate and sensitive way.
3.2. Basic Procedure
The test was conducted in the following procedure: The data of the vibration sensing system was first collected. During the operation of the atomic gravimeter, the atomic interference population and its triggering signal were collected with the output signal of the seismometer at the same time. In this test, the atomic interference gravity measurement was conducted 50 times with 24 s each. By normalized detection, the atomic interference population was gathered. Among 50 chirp scanning periods, each period generated the data of 12 s positive chirp scanning and 12 s negative chirp scanning, which followed the same principles of vibration compensation. From the data, 50 pieces of positive chirp scanning data were extracted for these periods to verify the proposed vibration compensation approach. During each measurement period, a sampling rate of 50 kHz was used to gather the vibration velocity signals from the seismometer at the corresponding time of gravity measurement. The output of the sensor was the voltage, which was denoted by .
Subsequently, the data of the seismometer were preliminarily processed. The transfer function of the seismometer was not absolutely equivalent to the simplified “gain-delay” model of the transfer function. The difference between them might make it impossible to accurately restore the actual vibration of the Raman reflector, resulting in insufficient vibration compensation. For this reason, the data of the seismometer were preliminarily processed. Before implementing the vibration compensation algorithm, a digital lead compensation filter was employed to dynamically filter the original data. The transfer function was denoted by
H(
f) and expressed as in Formula (22) [
35]. It was a recursive infinite impulse response filter with the angular frequency
fa and
fb, and normally
fa <
fb.
By adjusting fa and fb, the filter could be used to compensate for the high-frequency amplitude attenuation of the seismometer’s transfer function and reduce the phase lag. Numerically, it could increase the bandwidth of the seismometer, so that the filtered transfer function of the seismometer was closer to the simplified “gain-delay” model of transfer function. In the test, we took fa = 70 Hz and fb = 700 Hz.
At last, the vibration compensation algorithm was employed for data post-processing. The collected data were synchronized with the atomic interference population through the triggering signal. The simplified model of the transfer function was then estimated by the EO algorithm. The seismometer output Us,i(t) should restore the actual vibration vref(t) of the Raman reflector as accurately as possible. The basic process and pseudo-code (see Algorithm 1) of the EO algorithm are as follows:
Step 1: Set the basic parameters and determine the population size and the maximum number of iterations. Set the proportion of gain and the search space of delay, and import the transition probability P sequence corresponding to the scanning phase sequence. Import the data of the seismometer output Us,i(t);
Step 2: Initialize the particle population, and set the initial value of four candidate solutions to be infinite;
Step 3: Determine the lowest RMSE of the interference fringe after fitting and vibration compensation for each set of data, and take it as the target function. Calculate the fitness of every individual. Select four individuals in terms of fitness, and calculate their mean value. Construct an equilibrium pool;
Step 4: Save the memory of these individuals and conserve the best individual of the current population. Update the exponential term and the generation rate;
Step 5: Select an individual randomly by equal probability from the constructed equilibrium pool and update the individual’s concentration by Formula (21);
Step 6: Move to Step 7 if the algorithm satisfies the condition for termination, that is, if the set maximum number of iterations is reached. Move to Step 3 to repeat the next search if not;
Step 7: Output the optimal individual of the equilibrium pool, that is, the optimal solution with the delay coefficient
τopt and gain coefficient
Kopt to calculate the corrected interference fringe and its RMSE at the time of fitting.
| Algorithm 1: Pseudo-Code of the EO algorithm |
| 1: Set parameters and import data |
| 2: Initialize particle concentration |
| 3: While |
| 4: For |
| 5: Calculate the fitness of all particles, and select the optimal particle |
| 6: End for |
| 7: Construct an equilibrium pool with Formula (12) and (13) |
| 8: For
|
| 9: Select the candidate solution randomly from the equilibrium pool |
| 10. Generate and randomly |
| 11: Calculate the exponential term with Formula (14) to (17) |
| 12: Calculate the generation rate with Formula (18) to (20) |
| 13: Update the concentration with Formula (21) |
| 14: End for |
| 15: |
| 16: End while |
4. Results and Analysis
The software MATLAB designed by a U.S. company MathWorks was used to verify the effectiveness of the EO algorithm. The particle population was set to 50, and the maximum number of search iterations was 30. The proportion of gain and the search space of delay were
and
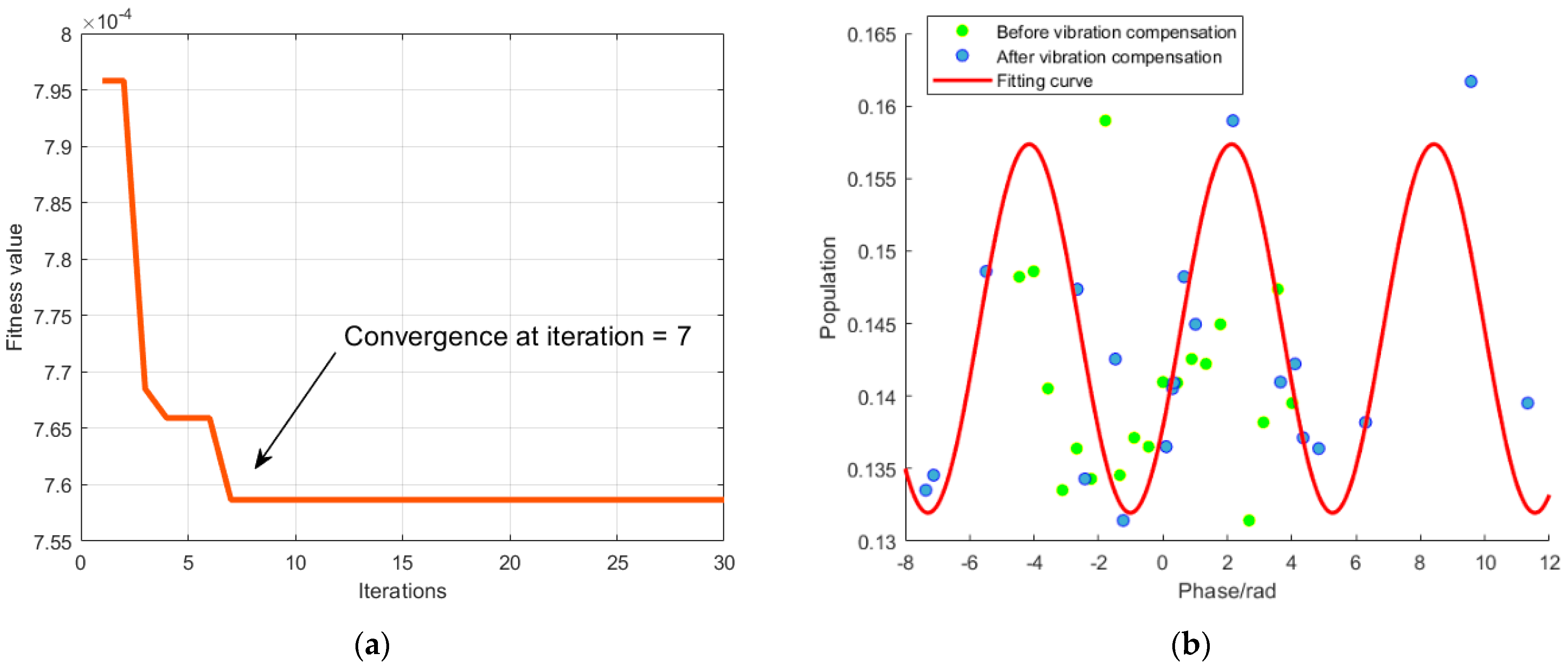
τ ∈ [−1,6], respectively. We collected a set of test data first. The set of data contained the atomic interference population collected by normalized detection from the atomic gravimeter detection system and the output voltage of the seismometer. Then, the parameters were estimated for the simplified model of transfer function using the EO algorithm. Vibration compensation was made to obtain the iterative optimization curve and the atomic gravimeter interference fringe curve. As shown in
Figure 5a, the fitness hit the bottom and converged after the seventh iteration. The local optimal gain coefficient
Kopt was determined to be 1.9087, and the optimal delay coefficient
τopt was 4.8765 ms.
Figure 5b showed the atomic interference population before (in green) and after (in blue) the vibration compensation. Evidently, the population before compensation was confusing and disordered. After compensation at the vibration phase, the population tended to be a cosine function. The vibration compensation algorithm still achieved a good correction of the interference fringe in a complex vibration environment. It could be approximately fit as a cosine curve (in red). Certainly, there were still some small deviations between the population and the fitting curve because of other external factors such as the seismometer’s limited performance and the atomic gravimeter being disturbed by other noise. Consequently, the measured atomic interference fringe did not form a perfect cosine curve.
After that, ten sets of data were further collected. The same parameters for the simplified model of transfer function were estimated for each set of data using the EO algorithm. The results are given in
Table 1, including the optimal gain coefficient
Kopt and the optimal delay coefficient
τopt. For the ten sets of data, the calculated values were
Kopt 1.9251 ± 0.2450 and
τopt 3.7864 ± 0.7116 ms. By comparison, the RMSE of the corrected fringe after compensation was significantly lower than the RMSE from the fitting with the original interference fringe before the vibration compensation. Moreover, the RMSE attenuation ratio
σ was also calculated. The mean attenuation reached 37.53%, and the max one was even up to 48.97%. As revealed by the measurement results with single vibration compensation (one set of data) and ten sets of data, it was feasible and effective to estimate the parameters for the simplified model of transfer function using the EO algorithm. This could satisfyingly restore the actual vibration of the Raman reflector. Additionally, the vibration compensation algorithm actualized the correction and fitting of the original interference fringe, and the RMSE at the time of fitting attenuated dramatically after compensation.
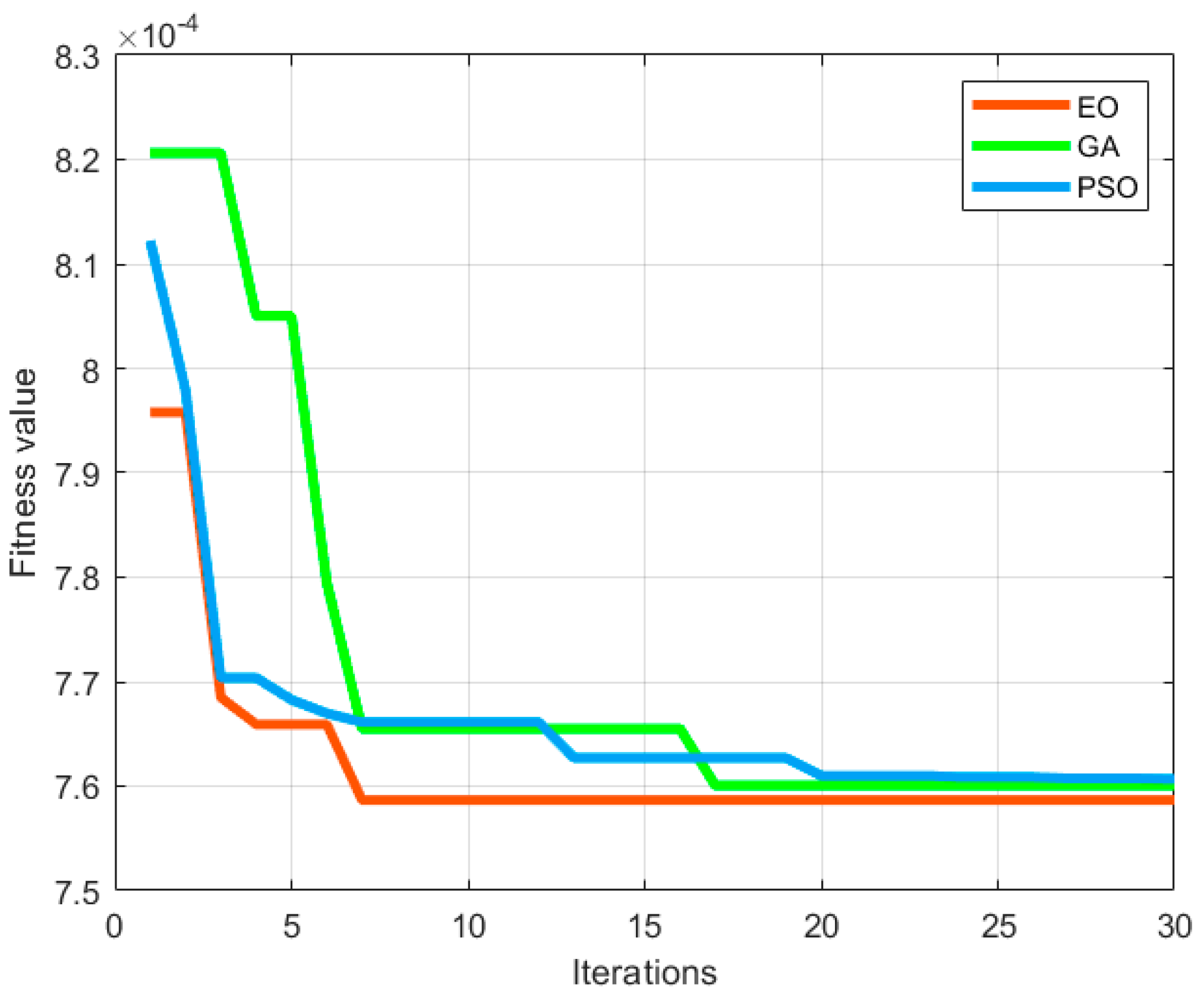
Two classic optimization approaches were adopted for iterative optimization, that is, the genetic algorithm (GA) and particle swarm optimization (PSO), and then they were compared with the EO algorithm. The performance evaluation indicators were first determined. As for the single vibration compensation, the iterative optimization curve was analyzed to assess the convergence rate of the algorithms, while the minimum fitness and RMSE attenuation ratio were calculated to evaluate the search capability of the algorithms. The duration of the optimization search was calculated to determine the optimization speed of the algorithms. The residual error Δ
g of gravity measurement was employed to evaluate the uncertainty of gravity measurement. The same population and maximum number of iterations were used for the three algorithms. The algorithms were compared with single vibration compensation for the same set of data. The iterative optimization curve is given in
Figure 6. As shown in the figure, the EO algorithm, the GA algorithm, and the PSO algorithm converged at the 7th, 17th, and 20th iterations, respectively, and their minimum fitness was 7.5866 × 10
−4, 7.6006 × 10
−4, and 7.6074 × 10
−4, respectively. It is evident that the EO algorithm converges faster than the other two algorithms in the optimization of parameters for the simplified model of the transfer function. Hence, the EO algorithm can achieve the lowest fitness and the best optimization.
Additionally, other performance indicators were compared for the single vibration compensation, as given in
Table 2. For the EO, GA, and PSO algorithms, the optimization search durations were 19.35 s, 46.32 s, and 56.23 s, respectively, and the RMSE attenuation ratios of the fringe fitting were 30.18%, 26.27%, and 27.99%, respectively. Compared with the GA and PSO algorithms, the EO algorithm performed better in search, and realized a higher RMSE attenuation ratio in fringe fitting, so that it could make better compensation for the influence of the vibration phase on the atomic gravimeter. After estimation, the simplified model of the transfer function received vibration compensation. After the atomic interference fringe fitting, the residual error Δ
g of the gravity measurement, which is different from the actual gravity by a gravity standard
g0, was calculated. The effect of vibration compensation was added to the gravity measurement. Theoretically, vibration-induced noise is one of the major restrictions to the measurement accuracy of an atomic gravimeter in a complex vibration environment. Therefore, vibration compensation exerts a direct effect on the gravity measurement of the atomic gravimeter. In this test, the residual errors Δ
g of the gravity measurement with the EO, GA, and PSO algorithms were 444.25, 812.35
, and 864.72
, respectively, which proved such a direct effect. In general, the EO algorithm can better search the parameters for the simplified model of the transfer function and restore the vibration signal. Through the compensation at the vibration phase, it delivers a better gravity measurement.
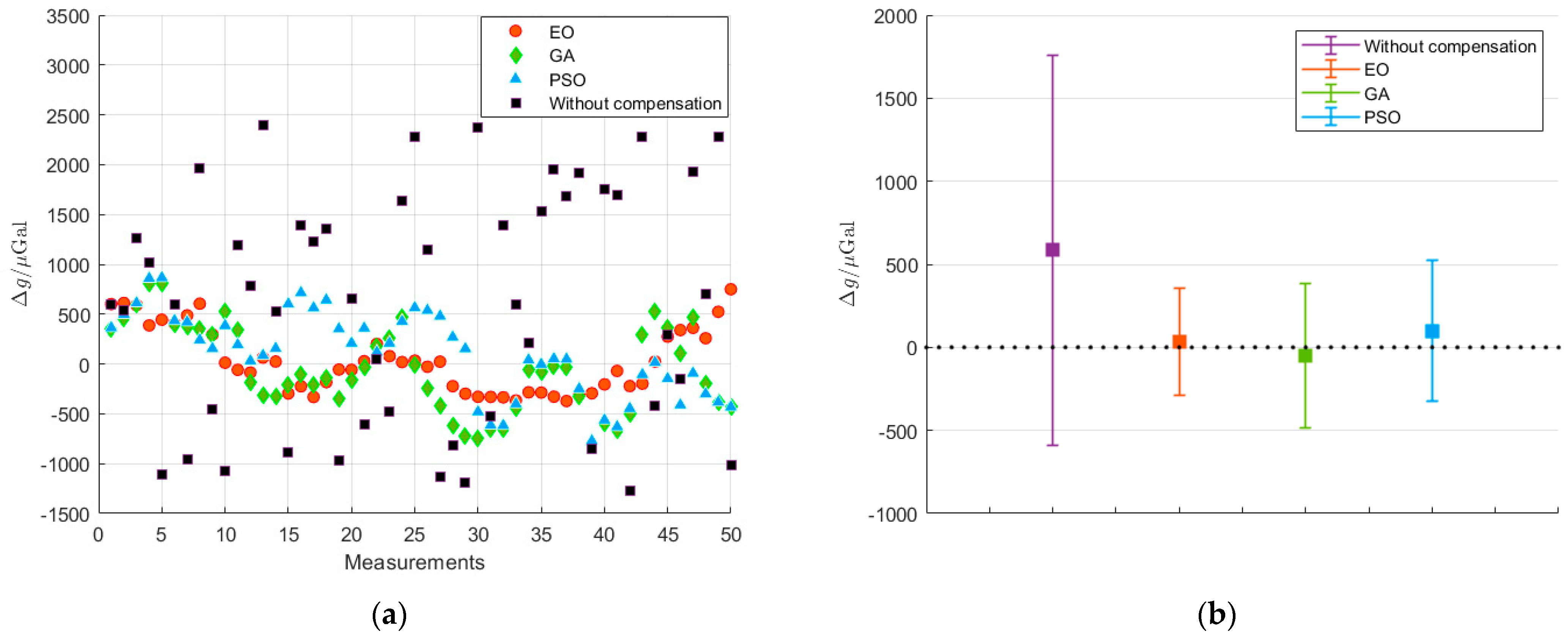
In order to further verify the performance of the algorithms, the test was repeated 50 times to gather the results of vibration compensation. We adopted several indicators to evaluate the effect of vibration compensation for the algorithms, including the mean value, standard deviation, and inhibitive factor γ of the residual error Δ
g of gravity measurement. Among them, γ was defined as the ratio of the gravity measurement resolution, before and after compensation. Evidently, the greater inhibitive factor demonstrated a better contribution of vibration compensation to the improvement of the gravity measurement resolution.
Figure 7a gives the measured Δ
g for the EO, GA, and PSO algorithms after 50 vibration compensations to eliminate the effect of vibration on the gravity measurement of the atomic gravimeter. The mean value of Δ
g with an error band is shown in
Figure 7b. The calculation results are presented in
Table 3. The mean values of Δ
g for the EO, GA, and PSO algorithms are 33.96 µGal, 52.52 µGal and 99.94 µGal, respectively, and their standard deviations are 323.53 µGal, 433.93 µGal, and 424.67 µGal, respectively. Evidently, the mean value and standard deviation of Δ
g are significantly optimized after vibration compensation. Among these algorithms, the EO algorithm shows the best optimization and delivers the best gravity measurement.
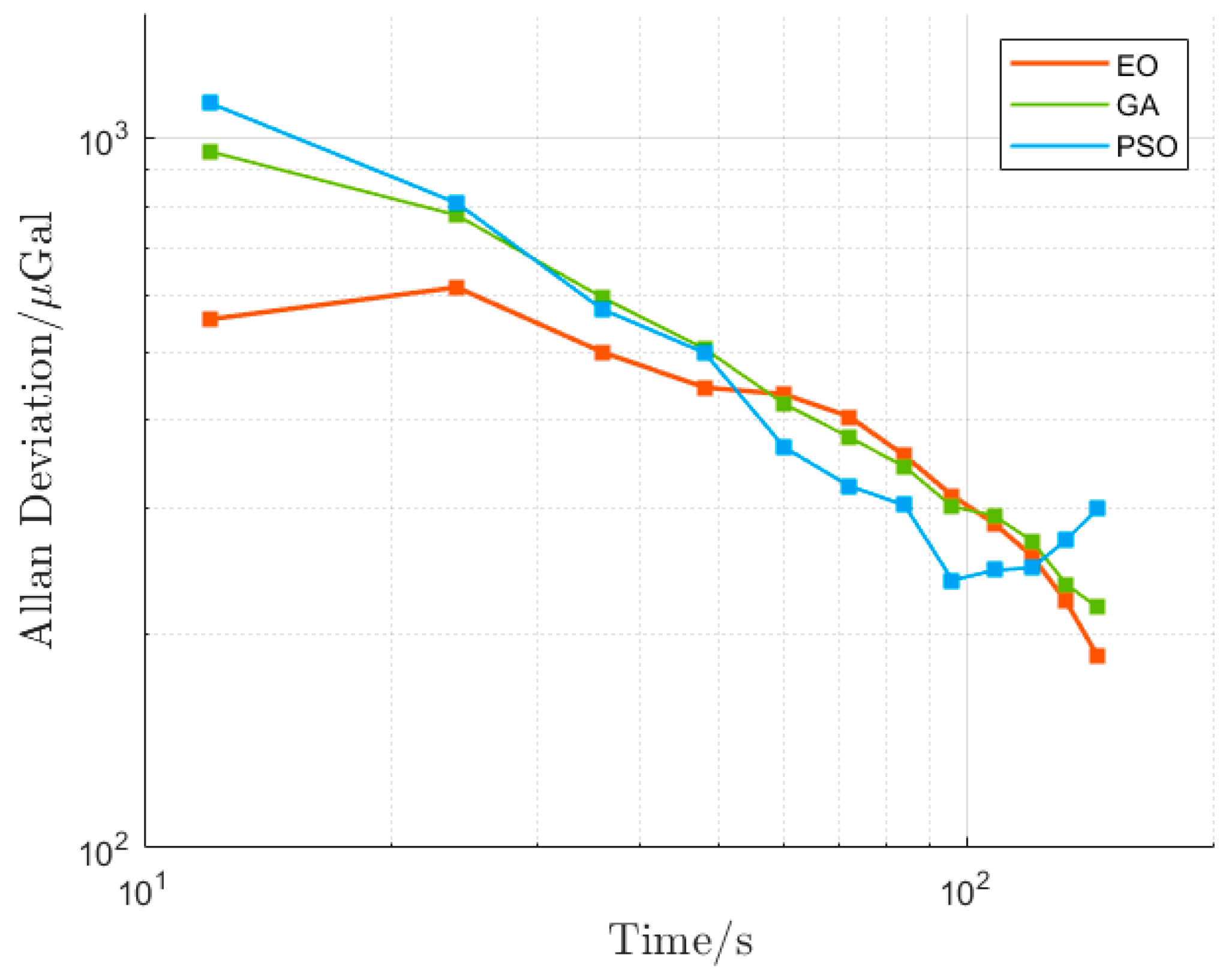
In a precision measurement, the Allan deviation can be used to assess the resolution and stability of an atomic gravimeter. In order to further evaluate and analyze the influence of the vibration compensation algorithms on gravity measurement, the Allan deviation of Δ
g was calculated (without considering the solid earth tide model since gravity measurement was conducted within a short period). The results, as shown in
Figure 8, visually demonstrate that the Allan deviation curves of the EO, GA, and PSO algorithms are not significantly different from each other. The calculated resolution and inhibitive factor γ are given in
Table 3. The gravity measurement resolutions of the EO, GA, and PSO algorithms are 186.70 μGal@144s, 218.30 μGal@144s, and 300.20 μGal@144s, respectively. Additionally, γ is 6.77, 5.79, and 4.21, respectively. Evidently, the EO algorithm is still superior to the other two algorithms.
5. Conclusions
The calculation of the vibration phase Δϕvib is crucial to the vibration compensation of an atomic gravimeter. It is essentially the restoration of an actual vibration of the Raman reflector. When the estimation of the transfer function is more accurate, the calculated Δϕvib is closer to its real value. This will ensure a better correction of the interference fringe for the atomic gravimeter, and greater accuracy in vibration compensation. In this paper, a vibration compensation approach is proposed with a simplified model of the transfer function estimated for the Raman reflector with the EO algorithm and is used to correct the interference fringe of an atomic gravimeter in a complex environment. In this approach, the practical transfer function between the vibration signal of the Raman reflector and the actual output signal of the seismometer in an atomic gravimeter is simplified into a “gain-delay” model. After analyzing the interference fringe detected by the gravimeter and the output of the seismometer, the RMSE in the fitting of the atomic interference fringe after compensation is taken as the fitness to estimate the above transfer function. In this way, the actual vibration signal of the Raman reflector can be restored in a more accurate way. This approach can adaptively estimate the most suitable transfer function for different measurement environments to achieve the best correction of an atomic interference fringe. Then, the optimal gravity measurement will be realized through vibration compensation. As proved by the test results, the proposed approach to estimating the parameters for the simplified model of transfer function is feasible and effective in a complex vibration environment. It could restore the actual vibration of the Raman reflector satisfactorily. The original interference fringe was corrected and fitted by virtue of the vibration compensation. The RMSE at the time was noticeably attenuated after compensation. Its mean value reached 37.53% and even went up to 48.97%. After being added to the gravity measurement through vibration compensation, the obtained residual error of gravity measurement was 33.96 ± 323.53 µGal. Compared with the other algorithms for parameter optimization, the proposed approach realizes faster convergence, lower fitness, and better optimization. Moreover, it can deliver a more accurate gravity measurement with a lower error.
Nevertheless, the test results are not as good as expected, which leaves room for further improvement of the proposed vibration compensation approach. Apart from further optimizing the algorithm for the estimation of the simplified model of transfer function, improvements can be made in the following aspects:
Optimization of a sensor for vibration measurement. The narrow bandwidth of a sensor leads to severe distortion of measured vibration, making it impossible to restore the vibration of a Raman reflector fully and truly. For this reason, a sensor with a larger bandwidth is often selected. Furthermore, the self-noise of the sensor should be taken into account, since it involves the internal electronic noise and the drift triggered by the change in the external environment. Several sensors of the same type can be combined to test their self-noise.
Proportion of noise at other phases. Vibration-induced noise is one of the major restrictions to the measurement sensitivity of an atomic gravimeter, but noise also exists at other residual phases and should not be ignored. When the noise at other phases takes a larger proportion of the total phase noise of the atomic gravimeter, it is necessary to further explore its influence on the vibration compensation algorithm.
Test on mobile platforms and in more complex vibration-induced noise environments. In a highly noisy environment, the phase noise caused by ground motion may spread over multiple atomic interference fringes, making it more difficult to implement vibration compensation.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}