
Data Acquisition Control for UAV-Enabled Wireless Rechargeable Sensor Networks


Abstract
:1. Introduction
- Most of the studies for WRSNs consider the case of harvesting energy from the surrounding environment or the mobile charger, but we address an environment in which sensor nodes harvest energy from both.
- Considering the energy obtained from energy harvesting and WPT, and the energy allocated by time, the algorithm that each node determines the amount of data it can sense and transmit is proposed. As a result, each node can collect uniform data over time without blackout.
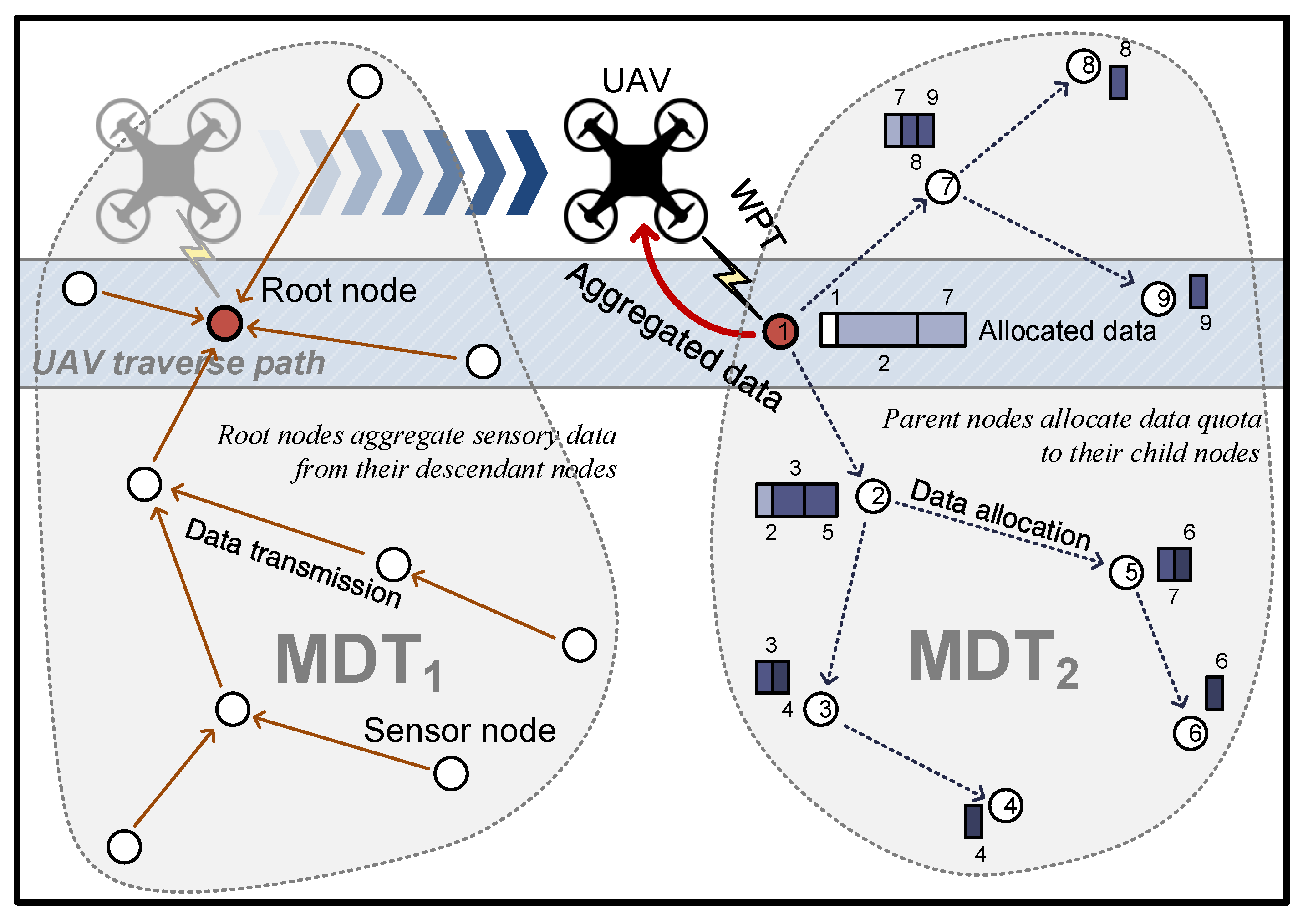
- The parent nodes collect more information than other existing schemes, which is the amount of data that descendent nodes can transmit and the number of descendent nodes, and based on this, determines the amount of data sensed by all nodes more accurately.
- By limiting the amount of data transmission of descendant nodes, the burden of parent nodes to transmit is reduced, preventing nodes in the hotspot from blackout. As a result, the data sensed by each node is successfully delivered to the sink node and geographically uniform data is obtained.
2. Related Work
3. Data Acquisition Control Scheme
3.1. Energy Models
3.1.1. Energy Model of the Sensor Nodes
3.1.2. Energy Model of the UAV
3.2. Determining the Amount of Data Sensed at Each Sensor Node
3.2.1. The Amount of Data Sensed
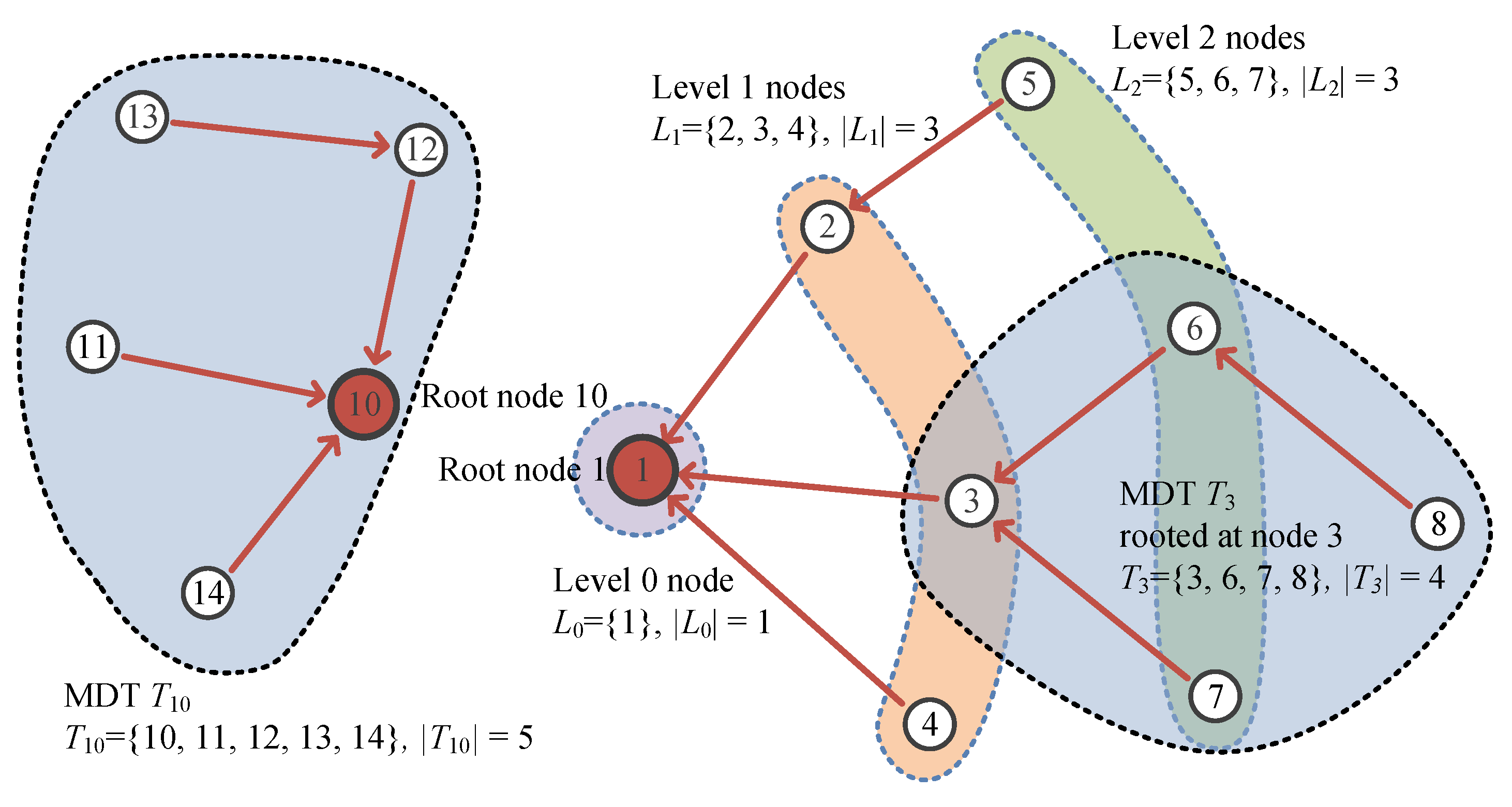
3.2.2. Determining the Number of MDTs
3.2.3. Creating MDTs and Routing
3.2.4. Allocating the Amount of Data Sensed
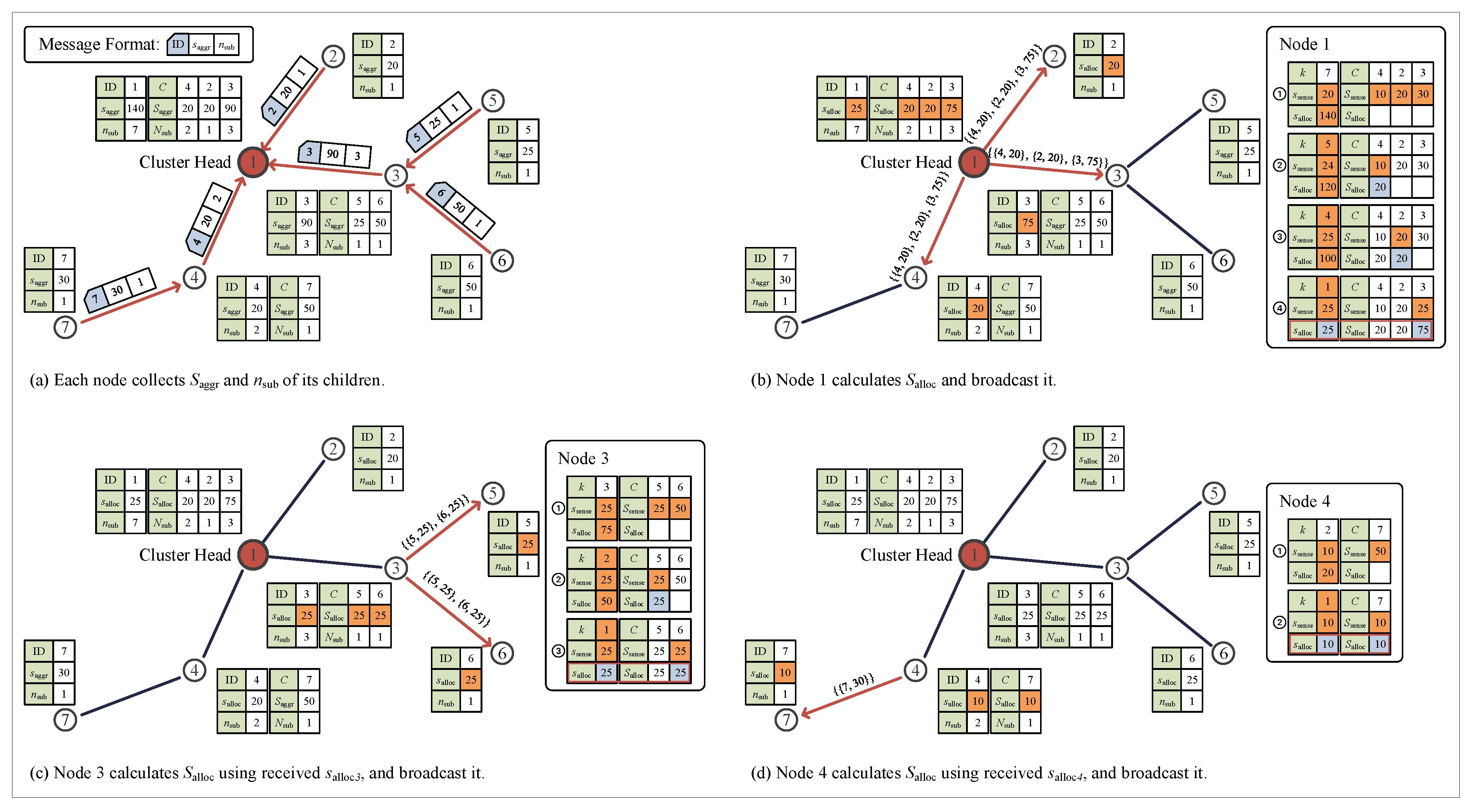
Collecting Information of All Nodes to Their Root Node
| Algorithm 1: Collecting information of all nodes to their root node. |
|
Allocating the Amount of Sensing Data for Collection
| Algorithm 2: Broadcasting the amount of data allocated to all child nodes. |
|
Example of Data Allocation Process
4. Performance Evaluation
4.1. Simulation Environment
4.2. Simulation Results
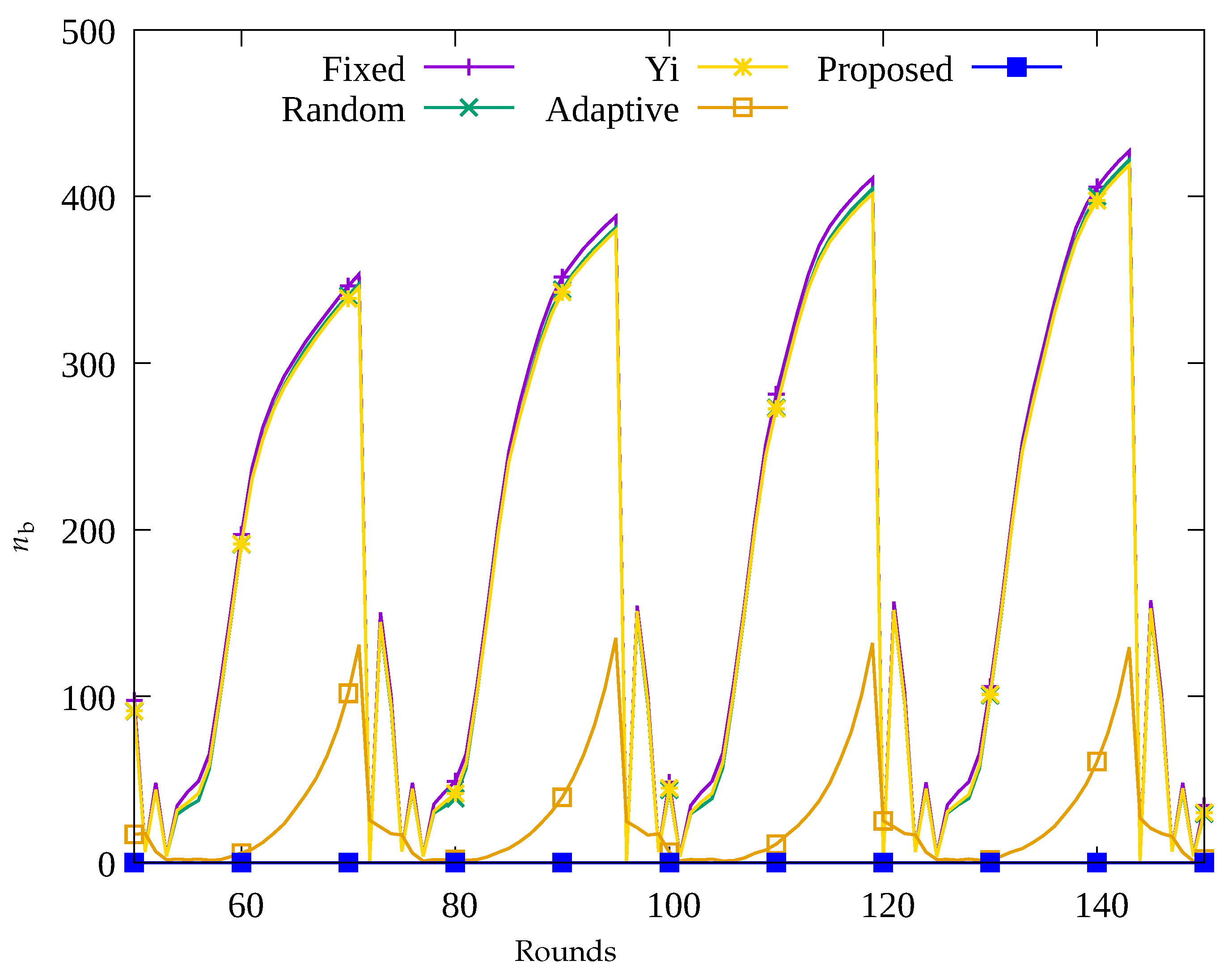
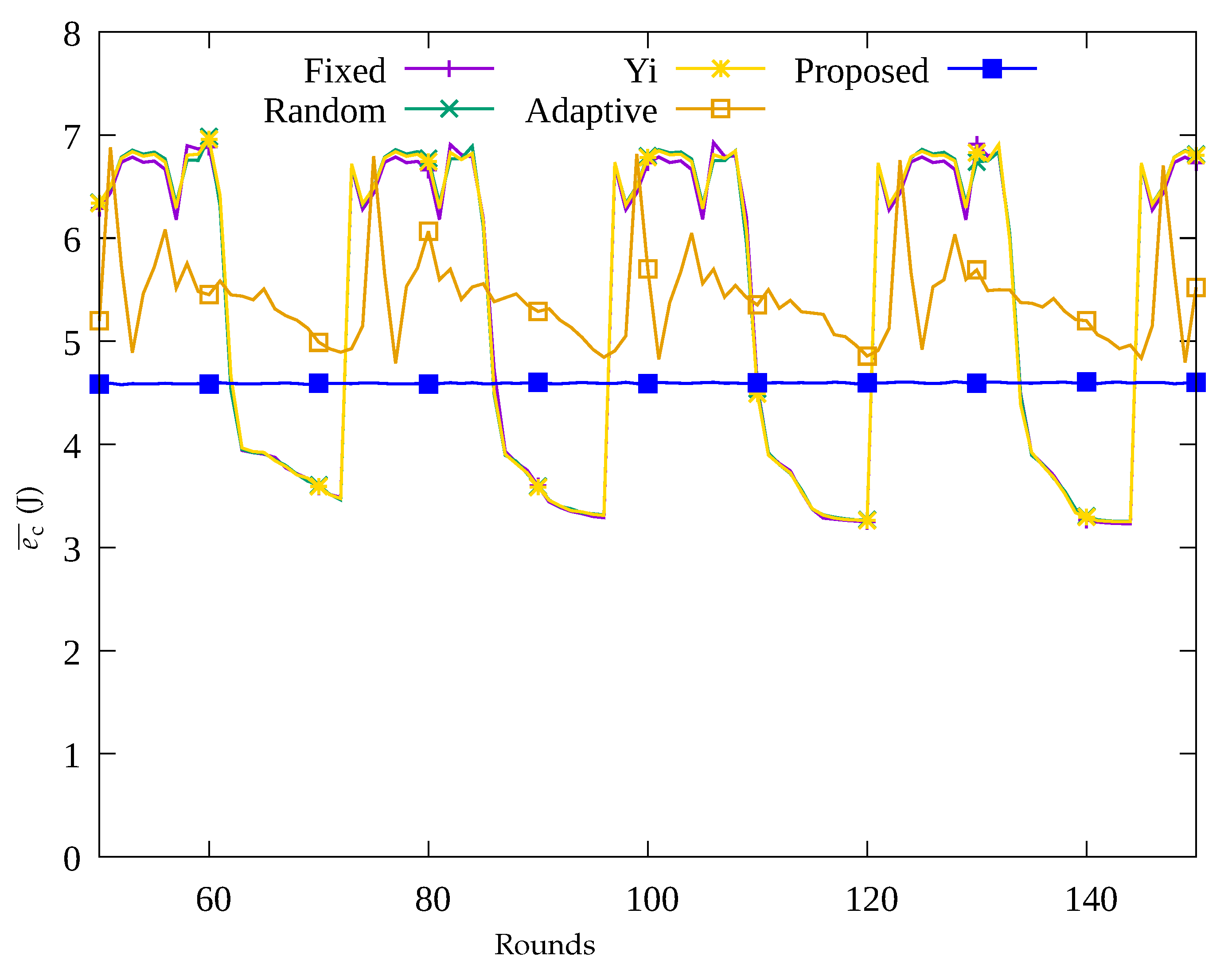
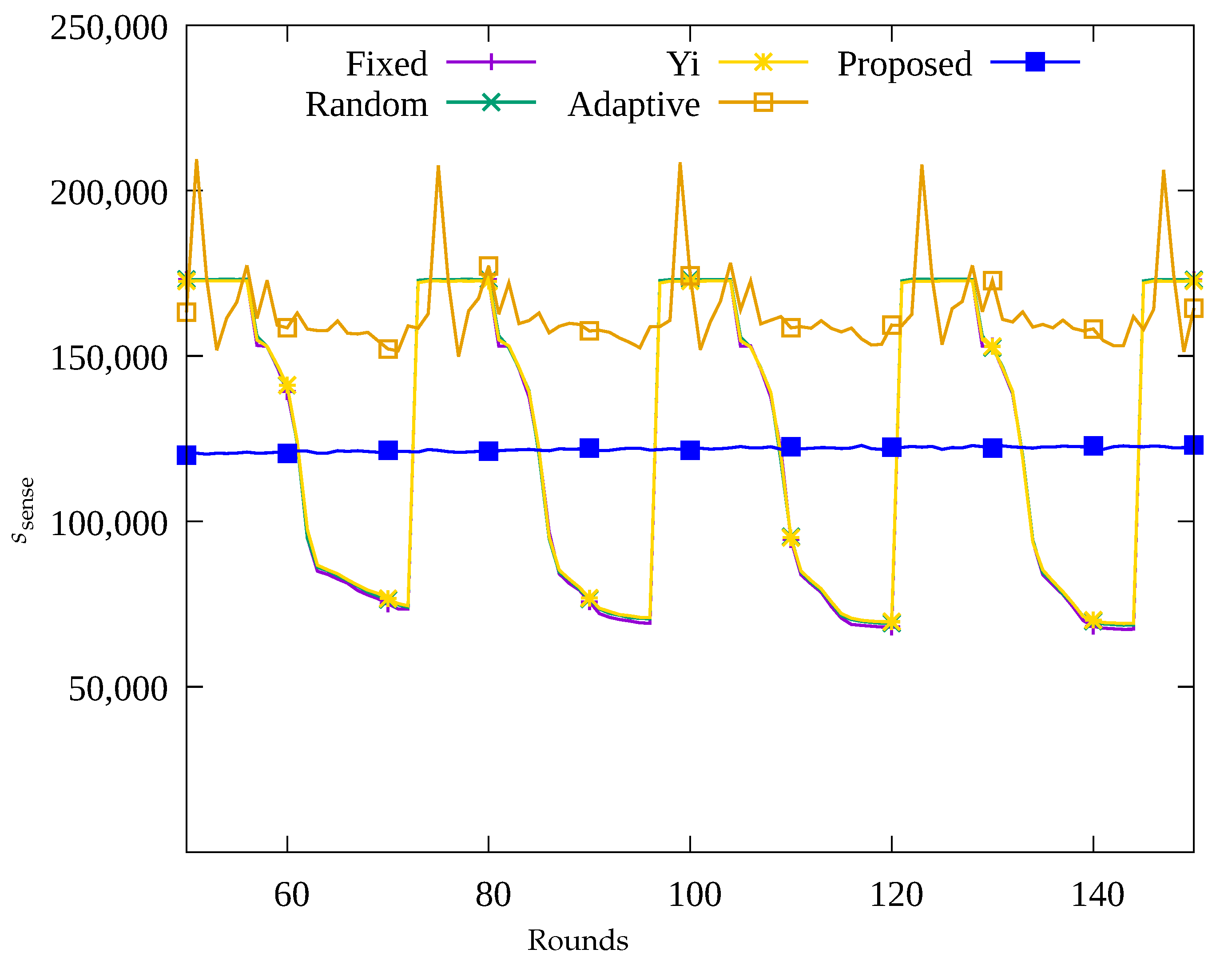
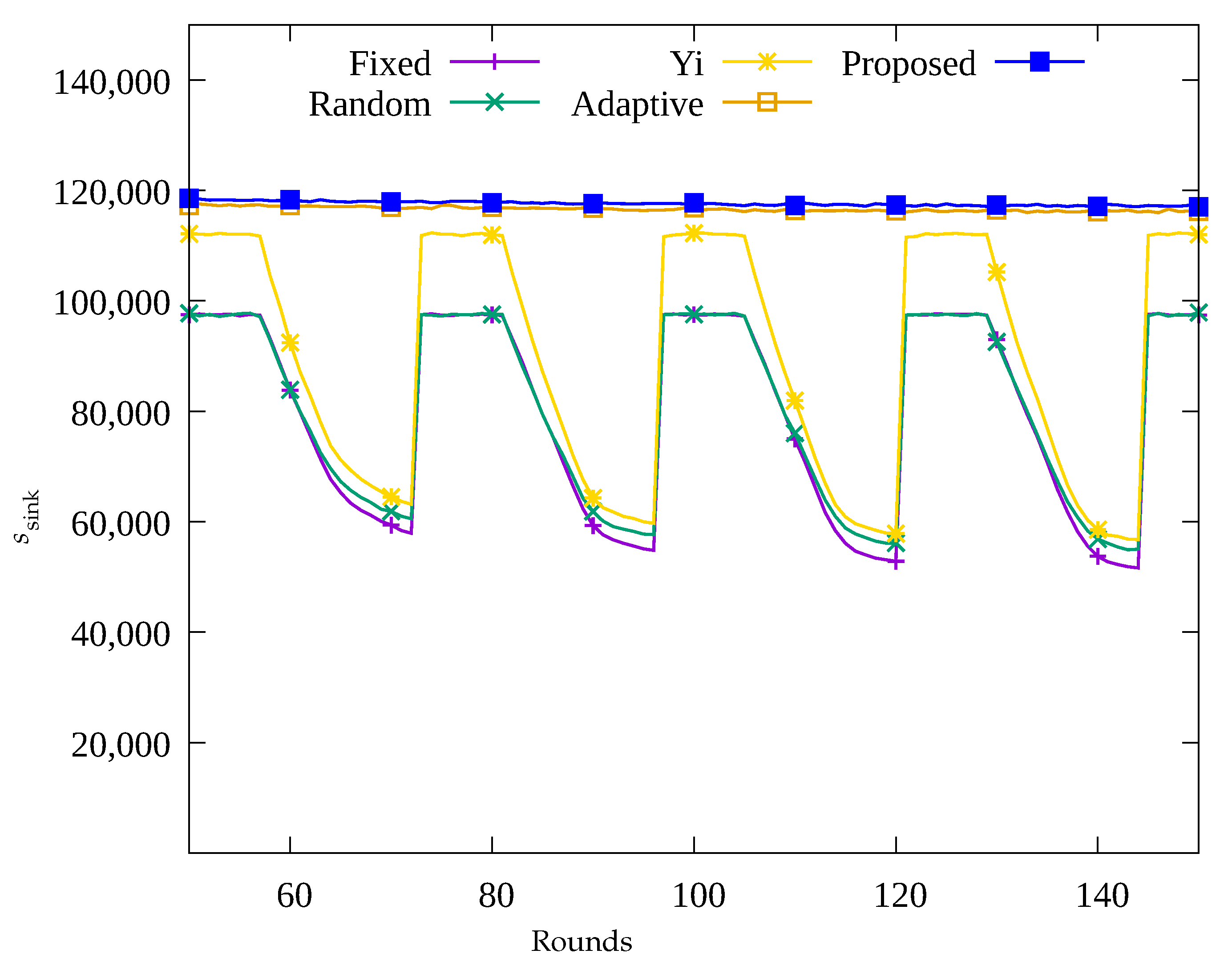
4.2.1. Performance Evaluation over Time
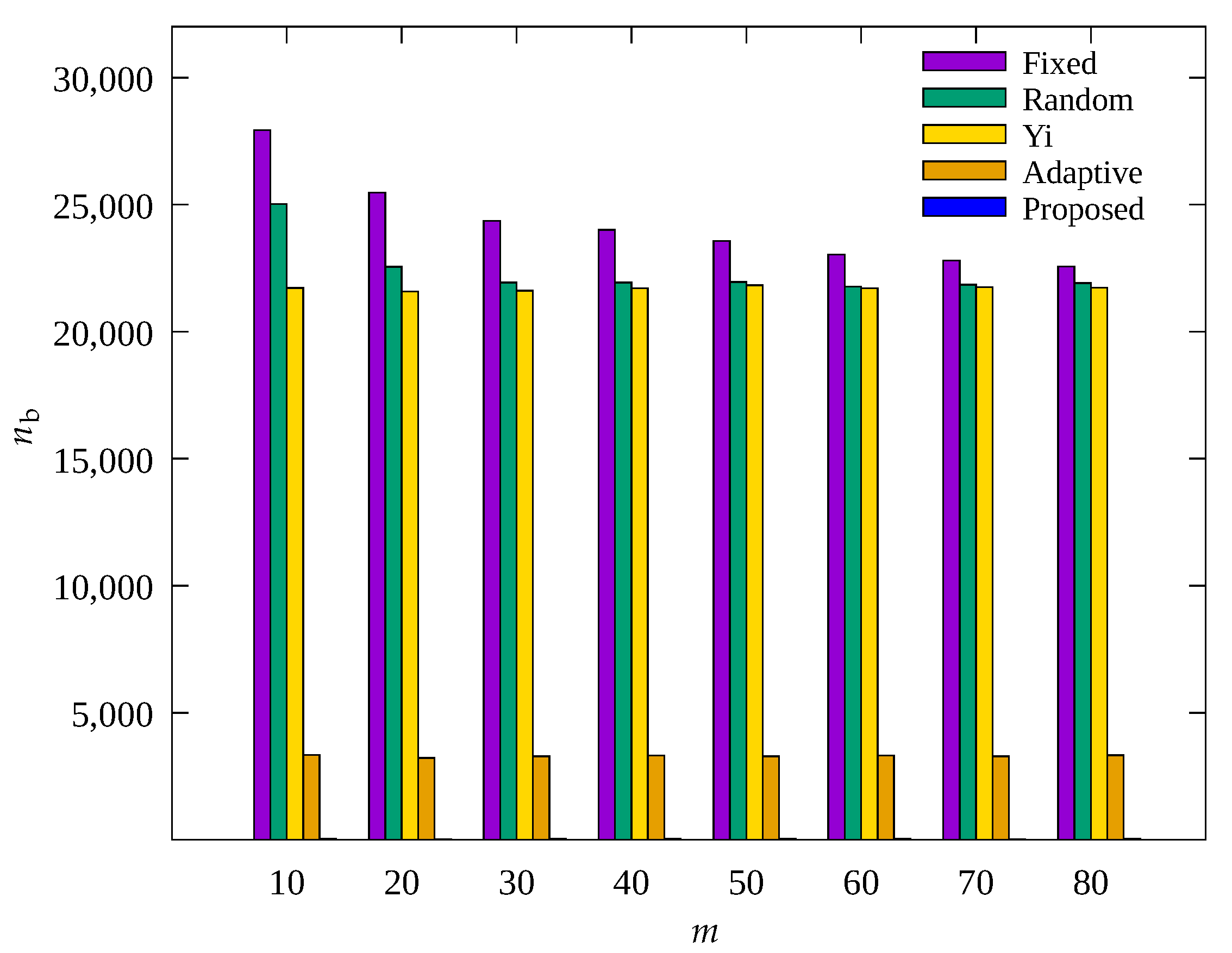
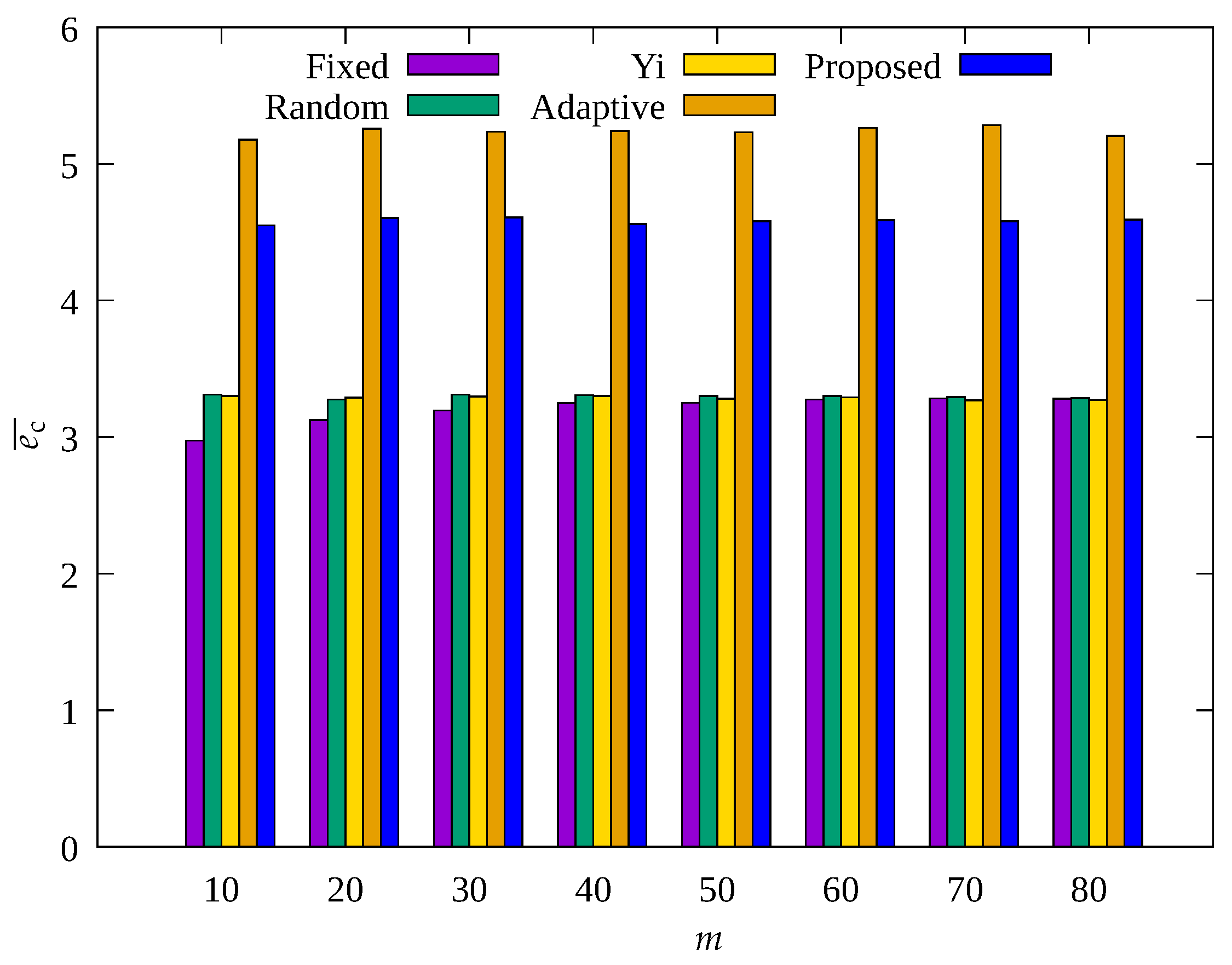
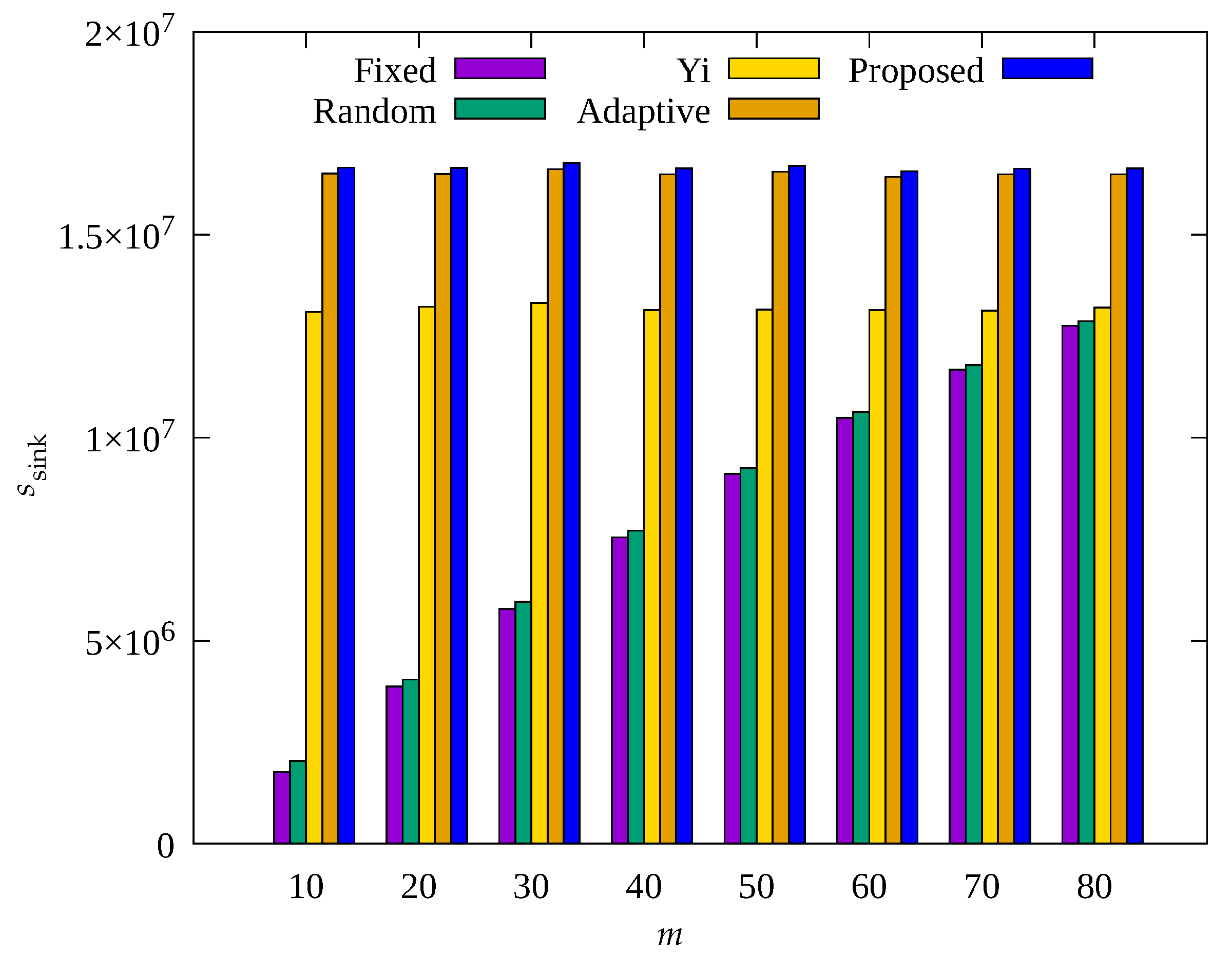
4.2.2. Performance Evaluation According to Number of MDTs
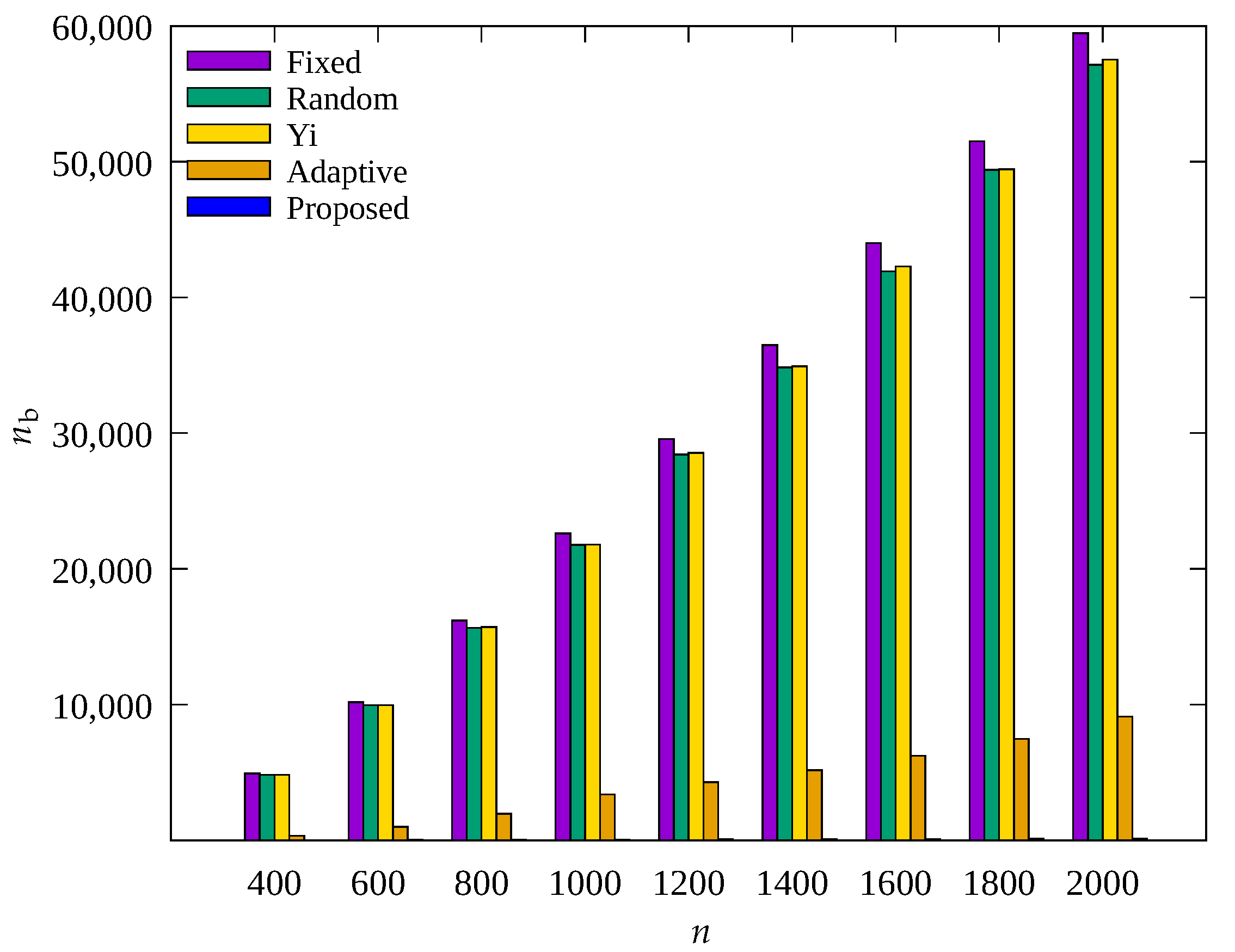
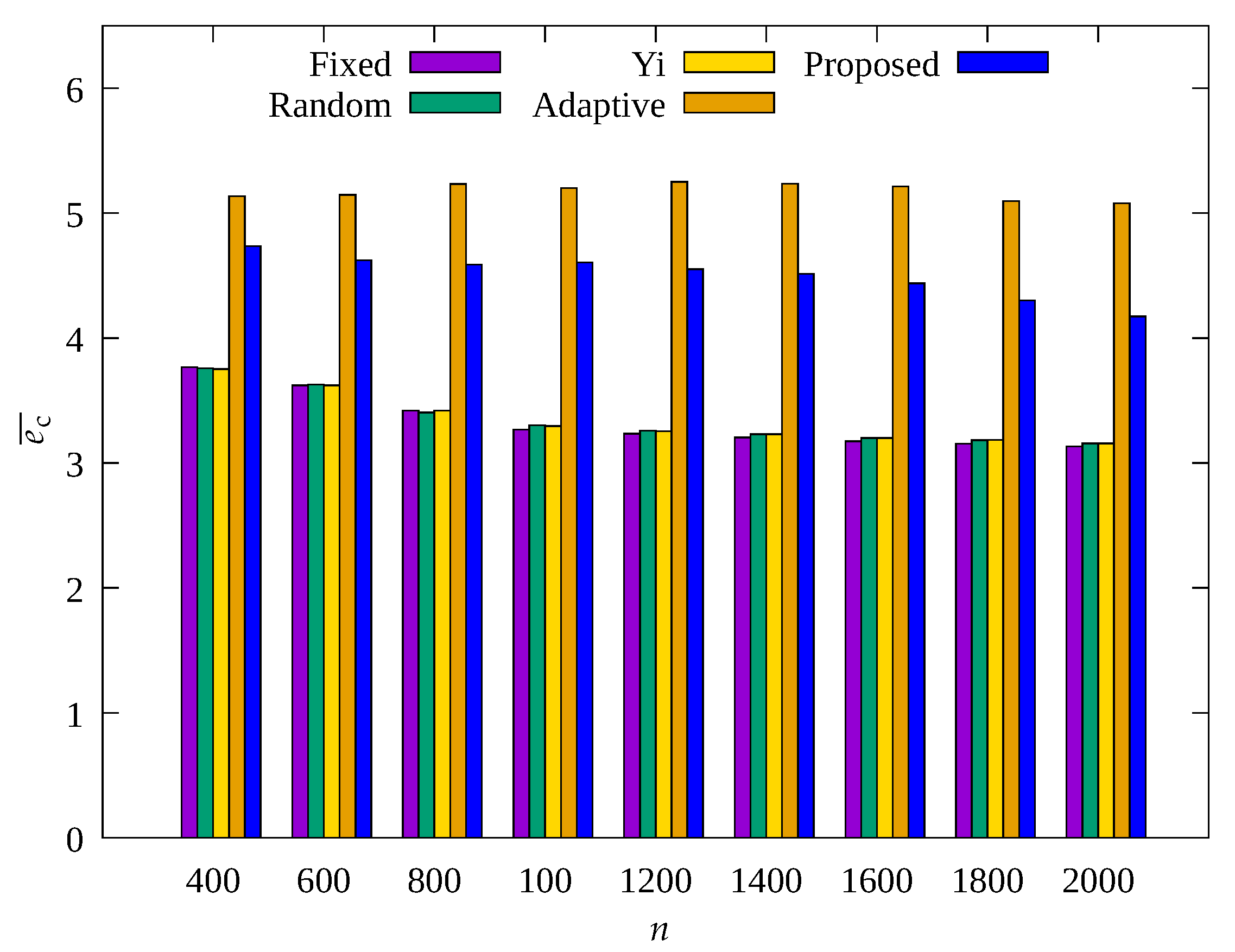
4.2.3. Performance Evaluation According to Number of Sensor Nodes
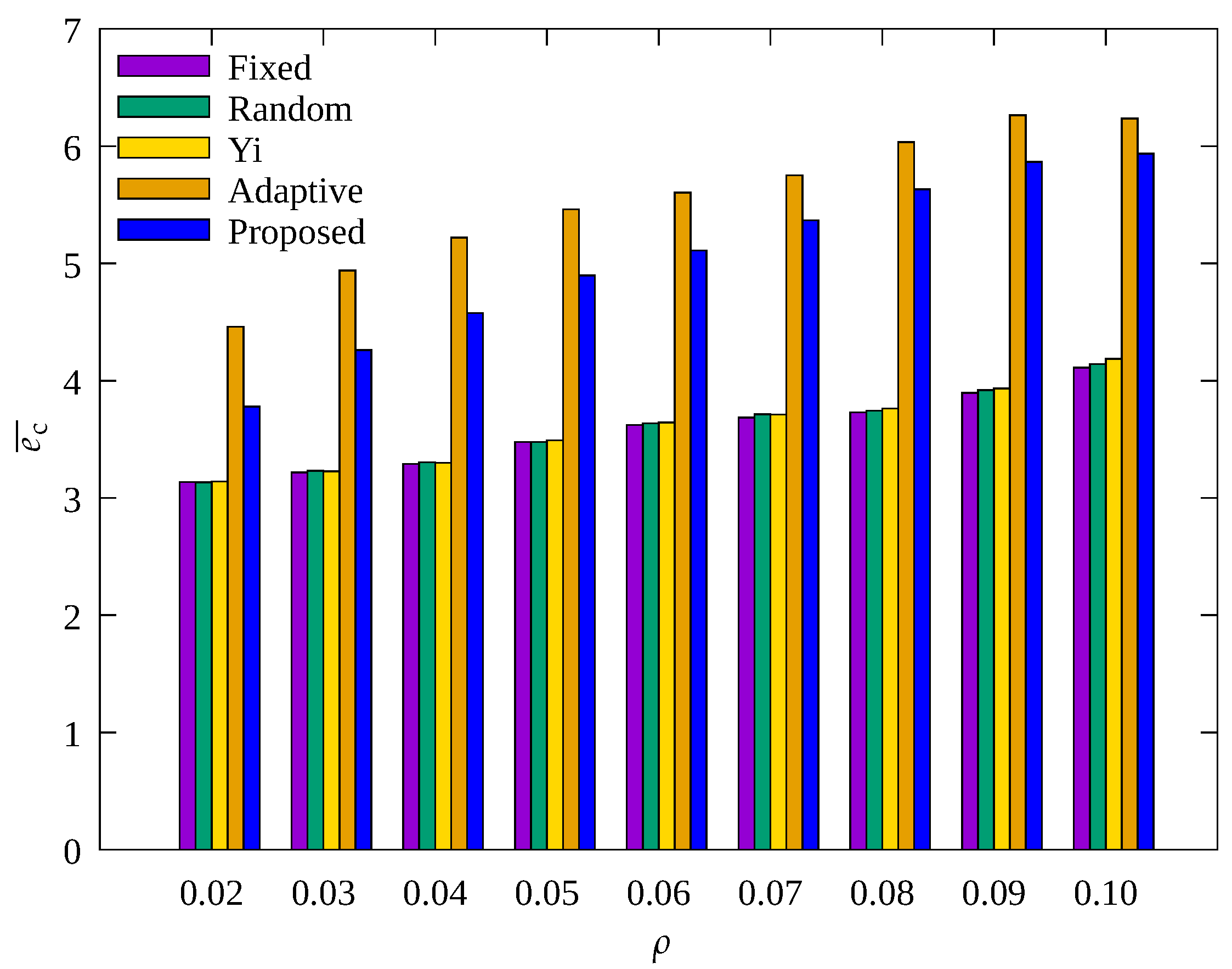
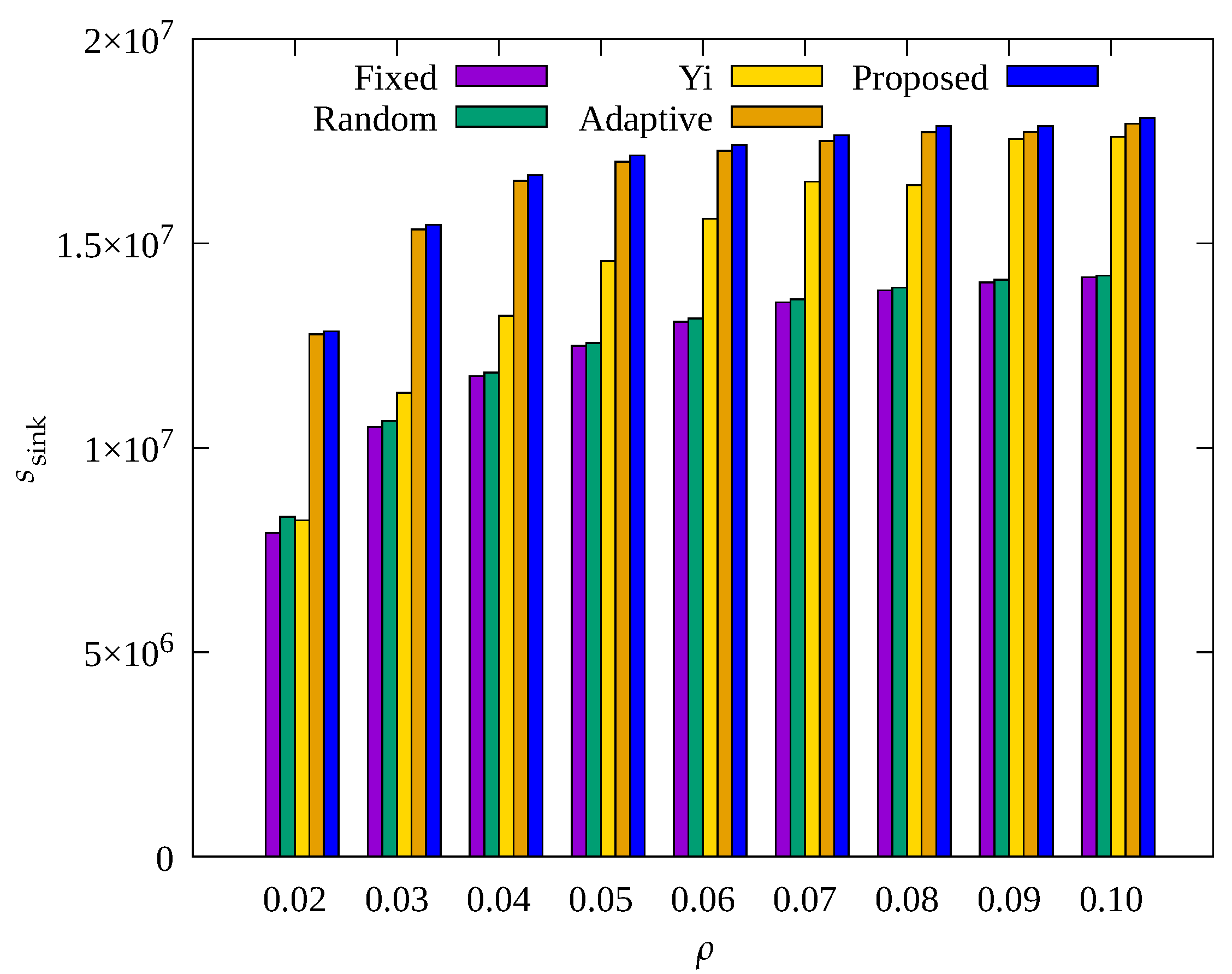
4.2.4. Performance Evaluation According to Node Density
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| WSN | Wireless sensor network |
| WRSN | Wireless rechargeable sensor network |
| UAV | Unmanned aerial vehicle |
| WPT | Wireless power transfer |
| MDT | Minimum depth tree |
| RF | Radio frequency |
References
- Shahraki, A.; Taherkordi, A.; Haugen, Ø.; Eliassen, F. Clustering objectives in wireless sensor networks: A survey and research direction analysis. Comput. Netw. 2020, 180, 107376. [Google Scholar] [CrossRef]
- Temene, N.; Sergiou, C.; Georgiou, C.; Vassiliou, V. A survey on mobility in Wireless Sensor Networks. Ad Hoc Netw. 2022, 125, 102726. [Google Scholar] [CrossRef]
- Raghunathan, V.; Kansal, A.; Hsu, J.; Friedman, J.; Srivastava, M. Design considerations for solar energy harvesting wireless embedded systems. In Proceedings of the 4th International Symposium on Information Processing in Sensor Networks, Boise, ID, USA, 15 April 2005; p. 64. [Google Scholar]
- Minami, M.; Morito, T.; Morikawa, H.; Aoyama, T. Solar biscuit: A battery-less wireless sensor network system for environmental monitoring applications. In Proceedings of the 2nd International Workshop on Networked Sensing Systems, San Diego, CA, USA, 27–28 June 2005. [Google Scholar]
- Li, S.; Yuan, J.; Lipson, H. Ambient wind energy harvesting using cross-flow fluttering. J. Appl. Phys. 2011, 109, 026104. [Google Scholar] [CrossRef] [Green Version]
- Weimer, M.A.; Paing, T.S.; Zane, R.A. Remote area wind energy harvesting for low-power autonomous sensors. System 2006, 2, 2. [Google Scholar]
- Stordeur, M.; Stark, I. Low power thermoelectric generator-self-sufficient energy supply for micro systems. In Proceedings of the 16th International Conference on Thermoelectrics, Dresden, Germany, 26–29 August 1997; pp. 575–577. [Google Scholar]
- Torah, R.; Glynne-Jones, P.; Tudor, M.; O’donnell, T.; Roy, S.; Beeby, S. Self-powered autonomous wireless sensor node using vibration energy harvesting. Meas. Sci. Technol. 2008, 19, 125202. [Google Scholar] [CrossRef]
- Beeby, S.P.; Torah, R.; Tudor, M.; Glynne-Jones, P.; O’donnell, T.; Saha, C.; Roy, S. A micro electromagnetic generator for vibration energy harvesting. J. Micromech. Microeng. 2007, 17, 1257. [Google Scholar] [CrossRef]
- Piorno, J.R.; Bergonzini, C.; Atienza, D.; Rosing, T.S. Prediction and management in energy harvested wireless sensor nodes. In Proceedings of the 1st International Conference on Wireless Communication, Vehicular Technology, Information Theory and Aerospace & Electronic Systems Technology, Aalborg, Denmark, 17–20 May 2009; pp. 6–10. [Google Scholar]
- Cammarano, A.; Petrioli, C.; Spenza, D. Pro-Energy: A novel energy prediction model for solar and wind energy-harvesting wireless sensor networks. In Proceedings of the 9th International Conference on Mobile Adhoc and Sensor Systems, Las Vegas, NV, USA, 16 May 2012; pp. 75–83. [Google Scholar]
- Noh, D.K.; Kang, K. Balanced energy allocation scheme for a solar-powered sensor system and its effects on network-wide performance. J. Comput. Syst. Sci. 2011, 77, 917–932. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; He, S.; Chen, J. Data gathering optimization by dynamic sensing and routing in rechargeable sensor networks. IEEE/ACM Trans. Netw. 2016, 24, 1632–1646. [Google Scholar] [CrossRef]
- Ijemaru, G.K.; Ang, K.L.M.; Seng, J.K. Wireless power transfer and energy harvesting in distributed sensor networks: Survey, opportunities, and challenges. Int. J. Distrib. Sens. Netw. 2022, 18, 15501477211067740. [Google Scholar] [CrossRef]
- Sharma, P.; Singh, A.K. A survey on RF energy harvesting techniques for lifetime enhancement of wireless sensor networks. Sustain. Comput. Inform Syst. 2023, 37, 100836. [Google Scholar] [CrossRef]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless networks with RF energy harvesting: A contemporary survey. IEEE Commun. Surv. Tutor. 2014, 17, 757–789. [Google Scholar] [CrossRef] [Green Version]
- Eidaks, J.; Kusnins, R.; Kolosovs, D.; Babajans, R.; Cirjulina, D.; Krukovskis, P.; Litvinenko, A. Multi-Hop RF Wireless Power Transfer for Autonomous Wireless Sensor Network. In Proceedings of the Workshop on Microwave Theory and Techniques in Wireless Communications, Riga, Latvia, 5–7 October 2022; pp. 51–56. [Google Scholar]
- Perera, T.D.P.; Panic, S.; Jayakody, D.N.K.; Muthuchidambaranathan, P.; Li, J. A WPT-enabled UAV-assisted condition monitoring scheme for wireless sensor networks. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5112–5126. [Google Scholar] [CrossRef]
- Guo, S.; Wang, C.; Yang, Y. Joint mobile data gathering and energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 2836–2852. [Google Scholar] [CrossRef]
- Tu, W.; Xu, X.; Ye, T.; Cheng, Z. A study on wireless charging for prolonging the lifetime of wireless sensor networks. Sensors 2017, 17, 1560. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rooshenas, A.; Rabiee, H.R.; Movaghar, A.; Naderi, M.Y. Reducing the data transmission in wireless sensor networks using the principal component analysis. In Proceedings of the Sixth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Brisbane, QLD, Australia, 7–10 December 2010; pp. 133–138. [Google Scholar]
- Balamurali, R.; Kathiravan, K.; Krishnan, T. Mitigating Hotspot Issue in WSN Using Sensor Nodes with Varying Initial Energy Levels and Quantification Algorithm. Cybern. Inf. Technol. 2019, 19, 118–136. [Google Scholar] [CrossRef] [Green Version]
- Al-Salti, F.; Alzeidi, N.; Day, K. Localization schemes for underwater wireless sensor networks: Survey. Int. J. Comput. Netw. Commun 2020, 12, 113–130. [Google Scholar] [CrossRef]
- Luo, J.; Chen, Y.; Wu, M.; Yang, Y. A survey of routing protocols for underwater wireless sensor networks. IEEE Commun. Surv. Tutor. 2021, 23, 137–160. [Google Scholar] [CrossRef]
- Tunca, C.; Isik, S.; Donmez, M.Y.; Ersoy, C. Distributed mobile sink routing for wireless sensor networks: A survey. IEEE Commun. Surv. Tutor. 2013, 16, 877–897. [Google Scholar] [CrossRef]
- Agarwal, V.; Tapaswi, S.; Chanak, P. A survey on path planning techniques for mobile sink in IoT-enabled wireless sensor networks. Wirel. Pers. Commun. 2021, 119, 211–238. [Google Scholar] [CrossRef]
- Yoon, I.; Noh, D.K. Adaptive Data Collection Using UAV With Wireless Power Transfer for Wireless Rechargeable Sensor Networks. IEEE Access 2022, 10, 9729–9743. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, A. Wireless power transfer and applications to sensor networks. IEEE Wirel. Commun. 2013, 20, 140–145. [Google Scholar]
- Har, D. Charging wireless sensor networks with mobile charger and infrastructure pivot cluster heads. arXiv 2017, arXiv:1703.05895. [Google Scholar]
- Ejaz, W.; Naeem, M.; Basharat, M.; Anpalagan, A.; Kandeepan, S. Efficient wireless power transfer in software-defined wireless sensor networks. IEEE Sens. J. 2016, 16, 7409–7420. [Google Scholar] [CrossRef]
- Sangare, F.; Xiao, Y.; Niyato, D.; Han, Z. Mobile charging in wireless-powered sensor networks: Optimal scheduling and experimental implementation. IEEE Trans. Veh. Technol. 2017, 66, 7400–7410. [Google Scholar] [CrossRef]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-enabled wireless power transfer: Trajectory design and energy optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef] [Green Version]
- Baek, J.; Han, S.I.; Han, Y. Optimal UAV route in wireless charging sensor networks. IEEE Internet Things J. 2019, 7, 1327–1335. [Google Scholar] [CrossRef]
- Hu, Y.; Yuan, X.; Zhang, G.; Schmeink, A. Sustainable wireless sensor networks with UAV-enabled wireless power transfer. IEEE Trans. Veh. Technol. 2021, 70, 8050–8064. [Google Scholar] [CrossRef]
- Chen, J.; Yu, C.W.; Ouyang, W. Efficient wireless charging pad deployment in wireless rechargeable sensor networks. IEEE Access 2020, 8, 39056–39077. [Google Scholar] [CrossRef]
- La Rosa, R.; Costanza, M.; Livreri, P. Advanced techniques for powering wireless sensor nodes through energy harvesting and wireless power transfer. In Proceedings of the International Conference of Electrical and Electronic Technologies for Automotive, Turin, Italy, 18–20 November 2020; pp. 1–6. [Google Scholar]
- Jadhav, S.B.; Lambor, S.M. Hybrid solar and radio frequency (RF) energy harvesting. In Proceedings of the International Conference on Power, Control, Signals and Instrumentation Engineering, Chennai, India, 21–22 September 2017; pp. 1975–1980. [Google Scholar]
- Wang, C.; Li, J.; Yang, Y.; Ye, F. A hybrid framework combining solar energy harvesting and wireless charging for wireless sensor networks. In Proceedings of the 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Tsoumanis, G.; Oikonomou, K.; Aïssa, S.; Stavrakakis, I. Energy and distance optimization in rechargeable wireless sensor networks. IEEE Trans. Green Commun. Netw. 2020, 5, 378–391. [Google Scholar] [CrossRef]
- Liu, Y.; Lam, K.Y.; Han, S.; Chen, Q. Mobile data gathering and energy harvesting in rechargeable wireless sensor networks. Inf. Sci. 2019, 482, 189–209. [Google Scholar] [CrossRef]
- Liu, Y.; Chin, K.W.; Yang, C.; He, T. Nodes deployment for coverage in rechargeable wireless sensor networks. IEEE Trans. Veh. Technol. 2019, 68, 6064–6073. [Google Scholar] [CrossRef]
- Shin, J.H.; Kim, J.; Park, K.; Park, D. Railroad: Virtual infrastructure for data dissemination in wireless sensor networks. In Proceedings of the 2nd ACM International Workshop on Performance Evaluation of Wireless ad hoc, Sensor, and Ubiquitous Networks, Montreal, QC, Canada, 10–13 October 2005; pp. 168–174. [Google Scholar]
- Melodia, T.; Pompili, D.; Akyildiz, I.F. Optimal local topology knowledge for energy efficient geographical routing in sensor networks. In Proceedings of the INFOCOM 2004—Twenty-third AnnualJoint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 3, pp. 1705–1716. [Google Scholar]
- Yi, J.M.; Yoon, I. Efficient energy supply using mobile charger for solar-powered wireless sensor networks. Sensors 2019, 19, 2679. [Google Scholar] [CrossRef] [Green Version]
- Son, Y.; Kang, M.; Kim, Y.; Yoon, I.; Noh, D.K. Energy-Efficient Cluster Management Using a Mobile Charger for Solar-Powered Wireless Sensor Networks. Sensors 2020, 20, 3668. [Google Scholar] [CrossRef] [PubMed]
- Olivares, T.; Tirado, P.; Orozco-Barbosa, L.; López, V.; Pedrón, P. Simulation of power-aware wireless sensor network architectures. In Proceedings of the the ACM International Workshop on Performance Monitoring, Measurement, and Evaluation of Heterogeneous Wireless and Wired Networks, Terromolinos, Spain, 2 October 2006; pp. 32–39. [Google Scholar]
- Yi, J.M.; Kang, M.J.; Noh, D.K. SolarCastalia: Solar energy harvesting wireless sensor network simulator. Int. J. Distrib. Sens. Netw. 2015, 11, 415174. [Google Scholar] [CrossRef]
- Park, K.N.; Yoon, I. An Efficient Energy Charging Scheme for Wireless Sensor Networks Using a Mobile Sink Capable of Wireless Power Transmission. J. Korea Soc. Comput. Inf. 2019, 24, 1–9. [Google Scholar]
- Jung, J.; Kang, M.; Yoon, I.; Noh, D.K. Adaptive forward error correction scheme to improve data reliability in solar-powered wireless sensor networks. In Proceedings of the International Conference on Information Science and Security, Pattaya, Thailand, 19–22 December 2016; pp. 1–4. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| 1000 | |
| 0.04 | |
| Routing | MDT |
| Packet error rate | 5% |
| Duration of a round | 1 h |
| Transmission period | 1 min |
| WPT efficiency | 50% |
| Transmission range | 10 m |
| Transmission rate | 250 kbps |
| Sensor battery capacity | 110 mAh |
| Sensor initial energy | 55 mAh |
| 4 | |
| 100 pJ/bit/ | |
| 48 mJ | |
| 8 J | |
| Max UAV speed | 16 m/s |
| Max UAV flying time | 20 min |
| UAV Battery capacity | 4480 mAh |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoon, I. Data Acquisition Control for UAV-Enabled Wireless Rechargeable Sensor Networks. Sensors 2023, 23, 3582. https://doi.org/10.3390/s23073582
Yoon I. Data Acquisition Control for UAV-Enabled Wireless Rechargeable Sensor Networks. Sensors. 2023; 23(7):3582. https://doi.org/10.3390/s23073582
Chicago/Turabian StyleYoon, Ikjune. 2023. "Data Acquisition Control for UAV-Enabled Wireless Rechargeable Sensor Networks" Sensors 23, no. 7: 3582. https://doi.org/10.3390/s23073582
APA StyleYoon, I. (2023). Data Acquisition Control for UAV-Enabled Wireless Rechargeable Sensor Networks. Sensors, 23(7), 3582. https://doi.org/10.3390/s23073582