
A Remote Monitoring System for Rodent Infestation Based on LoRaWAN



Abstract
:1. Introduction
2. Background
2.1. LoRa and LoRaWAN
- Long-range communication and low power consumption: LoRaWAN technology can provide coverage of up to 15 km in rural areas and up to 5 km in urban areas, while still maintaining low power consumption, allowing for battery-powered devices to operate for several years [26].
- Secure communication: LoRaWAN uses AES-128 encryption to secure communication between end-devices and gateways, ensuring data privacy and security [27].
- Scalability and cost-effectiveness: A LoRaWAN network can support thousands of end-devices, making it highly scalable for large-scale IoT deployments. Additionally, the cost of deploying a LoRaWAN network is relatively low due to its low power consumption and the availability of low-cost devices [28].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Operating Voltage | DC 1.8 V–3.7 V |
| Frequency Range | 137–525 MHz |
| RF Input Level | +10 dBm |
| Modulation | FSK/OOK/LoRaTM/GMSK/MSK |
| Bandwidth | 7.8–500 kHz |
| Maximum Bit Rate | Up to 300 kbps |
| Receiver Sensitivity | Down to −148 dBm |
| Operating Temperature | −40 °C to +85 °C |
| RF Output Power | +20 dBm |
| Range | 3–5 Km |
| Dimension | 20.5 × 15.5 × 2.0 mm |
2.2. Related Applications with LoRa Technology
3. Proposed System Architecture Design
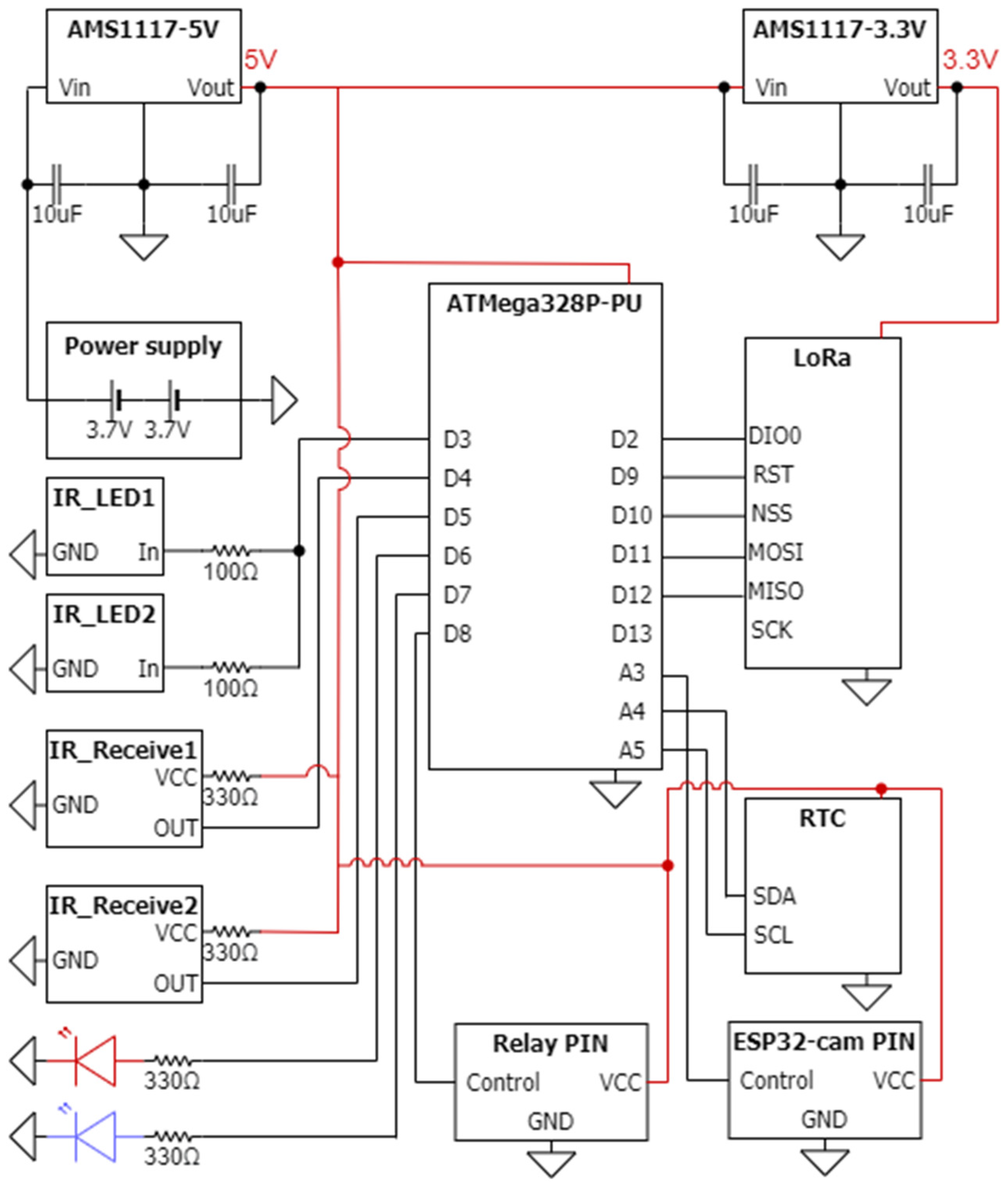
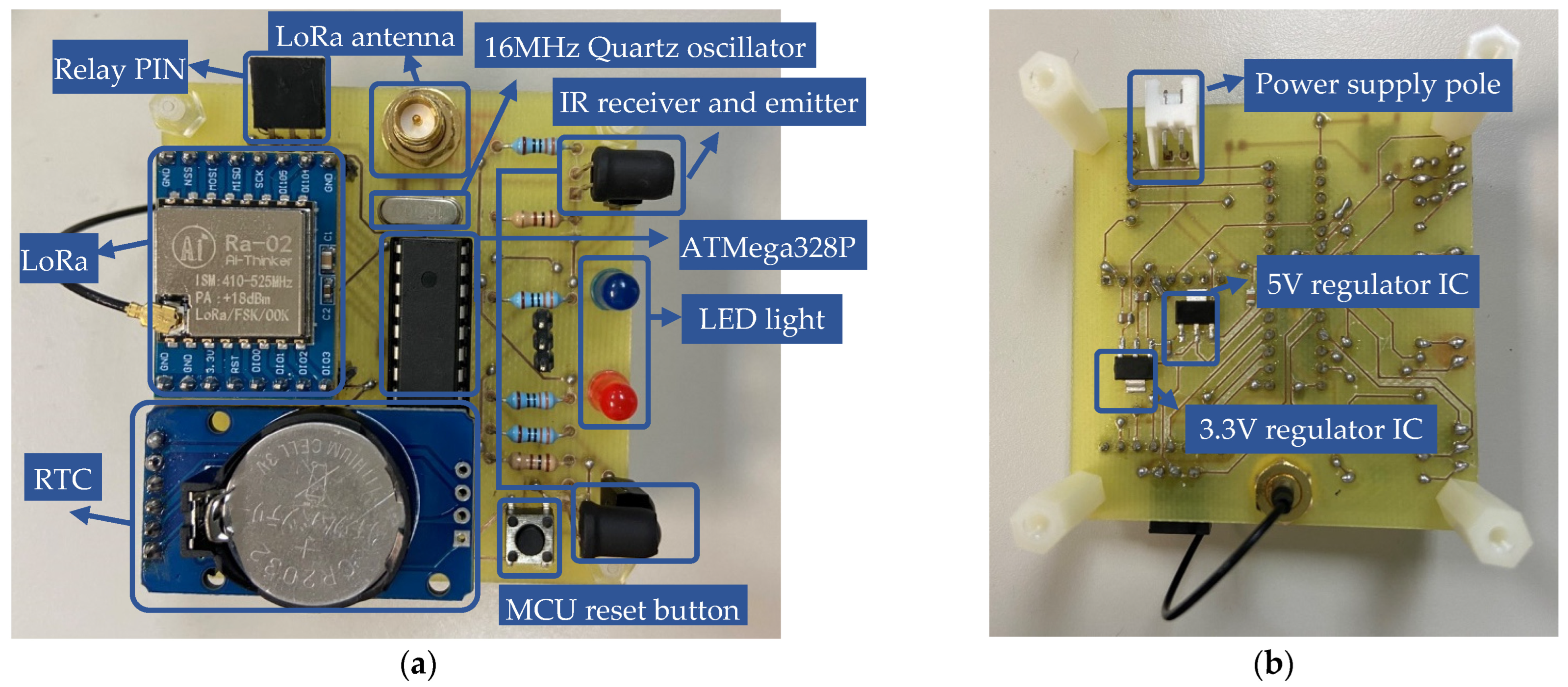
3.1. Proposed Hardware Design
3.1.1. The Circuit Design of Sensor Module
3.1.2. Proposed Circuit Design for Data Collection Gateways
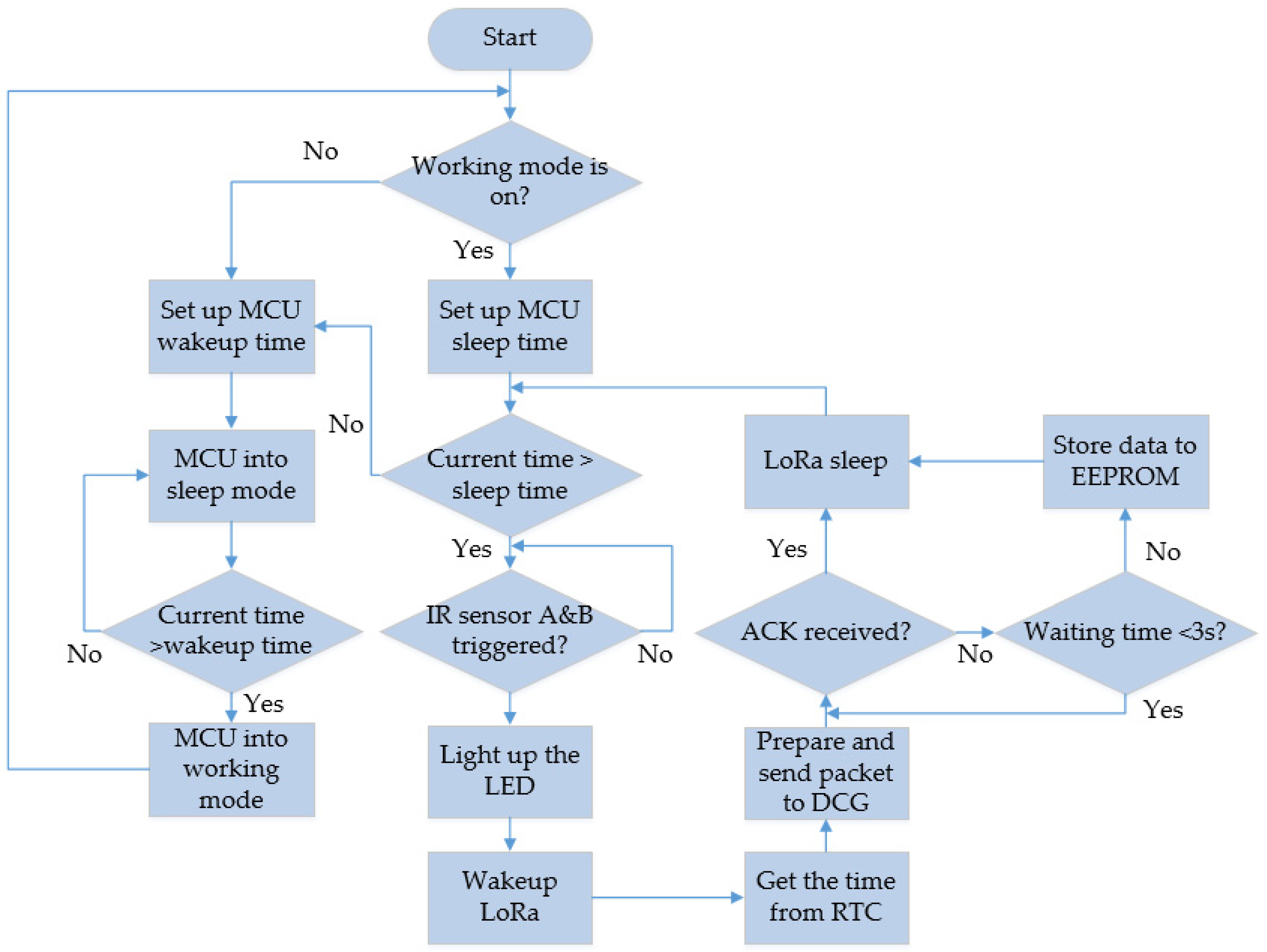
3.2. Firmware Design
3.2.1. Communication Interface
3.2.2. LoRa Transmission
- SF: The value is set as 12 because the transmission distance between the modules is far and the low data rate is acceptable.
- Transmit (Tx) Power [49]: This relates to the transmit power of the access point (AP) radio. This is a very important parameter. According to their radio regulations, the maximum value is set to 14 dBm. The value is set as a larger number in an obstructed environment, and vice versa. The allowed maximum output power is 2 Watts (W), which is equivalent to isotropically radiated power (EIRP) (outdoor) and 4W EIRP (indoor).
- Sleeping mode of LoRa: To save the power consumption, the MCU and LoRa are turned to deep sleeping mode in the daytime, and turned on at nighttime according to rodents’ habit.
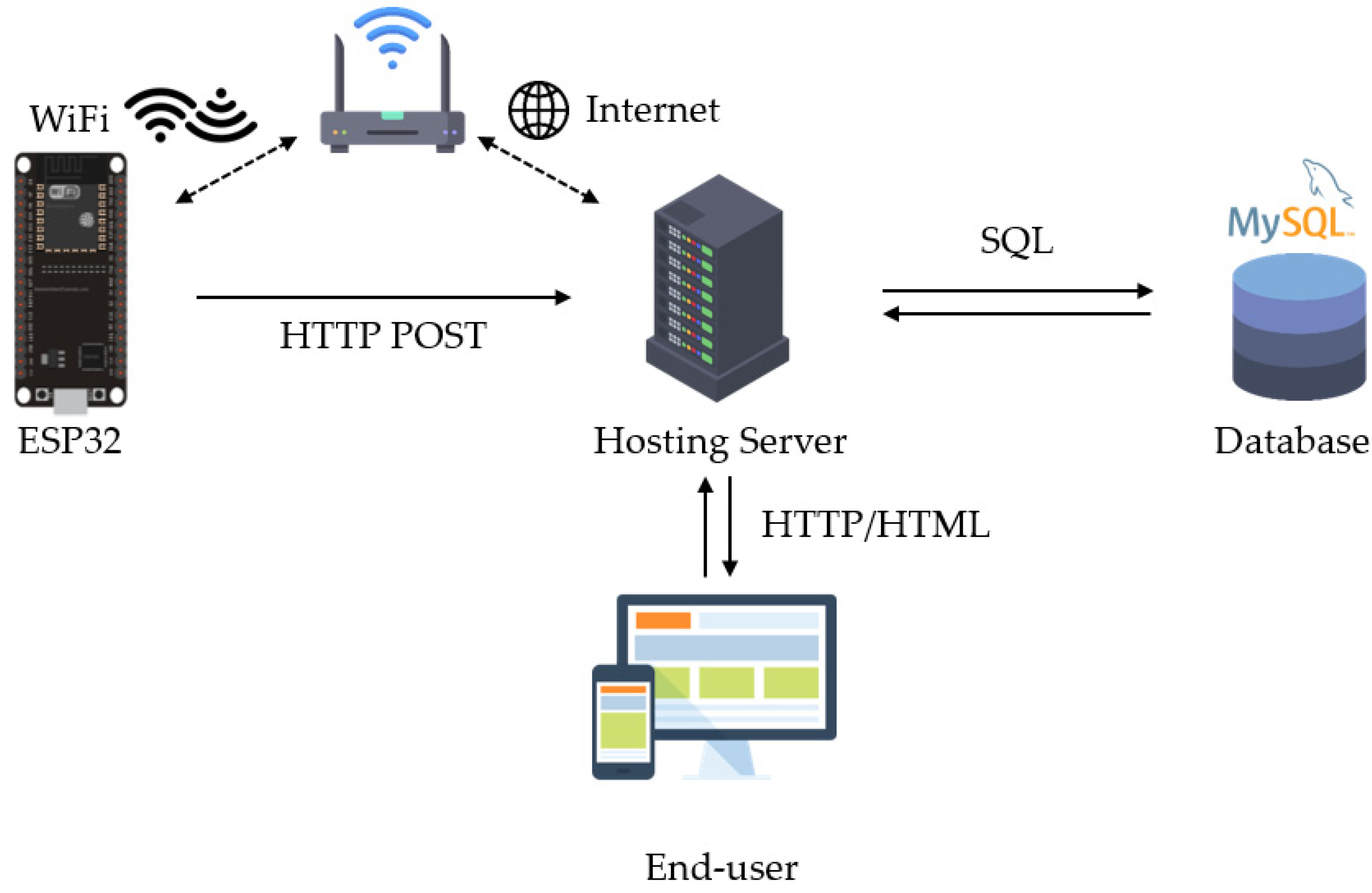
3.3. Software Design
- Data insertion: The packet received from DCG is stored in a JavaScript object notation (JSON) file, which contains the location, time stamp, and the passing direction. These data are segmented and stored in the corresponding fields of the database.
- Data query: Users can view the data via the website and inquire about the data. The function of inquiry consists of total rodent infestation and a comparison of each sensor node so that the users can figure out the infested area.
3.4. Auxiliary Design of Rodent Activity Image Acquisition
4. System Test, Analysis, and Discussion
4.1. Power Efficiency
4.2. Cost Analysis
4.3. Detecting Results of Rodent Activity
4.4. Other Related Issues
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Howard-Jones, N. Was Shibasaburo Kitasato the Co-Discoverer of the Plague Bacillus? Perspect Biol. Med. 1973, 16, 292–307. [Google Scholar] [CrossRef] [PubMed]
- Frith, J. The History of Plague-Part 1: The Three Great Pandemics. J. Mil. Veterans Health 2012, 20, 11–16. [Google Scholar]
- Perry, R.D.; Fetherston, J.D. Yersinia Pestis--Etiologic Agent of Plague. Clin. Microbiol. Rev. 1997, 10, 35–66. [Google Scholar] [CrossRef] [PubMed]
- Singleton, G. Impacts of Rodents on Rice Production in Asia; IRRI: Los Baños Philippines, 2003. [Google Scholar]
- Meerburg, B.G.; Bonde, M.; Brom, F.W.A.; Endepols, S.; Jensen, A.N.; Leirs, H.; Lodal, J.; Singleton, G.R.; Pelz, H.-J.; Rodenburg, T.B.; et al. Towards Sustainable Management of Rodents in Organic Animal Husbandry. NJAS Wagening. J. Life Sci. 2004, 52, 195–205. [Google Scholar] [CrossRef]
- Mason, G.; Littin, K.E. The Humaneness of Rodent Pest Control. Anim. Welf. 2003, 12, 1–37. [Google Scholar] [CrossRef]
- Nowak, R.M.; Walker, E.P. Walker’s Mammals of the World; JHU Press: Baltimore, MD, USA, 1999; Volume 1. [Google Scholar]
- Zimmermann, A.; Matschiner, J.T. Biochemical Basis of Hereditary Resistance to Warfarin in the Rat. Biochem. Pharmacol. 1974, 23, 1033–1040. [Google Scholar] [CrossRef]
- Buckle, A.; Smith, R. Rodent Pests and Their Control; CABI: Wallingford, UK, 2015. [Google Scholar]
- Gao, Y.; Short, R. V Use of an Oestrogen, Androgen or Gestagen as a Potential Chemosterilant for Control of Rat and Mouse Populations. Reproduction 1993, 97, 39–49. [Google Scholar] [CrossRef]
- Meehan, A.P. Rats and Mice. Their Biology and Control; Rentokil Ltd.: Singapore, 1984. [Google Scholar]
- Corrigan, R.M. The Efficacy of Glue Traps against Wild Populations of House Mice, Mus Domesticus Rutty. In Proceedings of the Vertebrate Pest Conference, Costa Mesa, CA, USA, 2–5 March 1998; Volume 18. [Google Scholar]
- Rentokil Technical Support: Remote Monitoring (Pestconnect). Available online: https://www.rentokil.com.au/mice/radar/ (accessed on 23 March 2023).
- Goodnature. Goodnature E2 Rodent Control System. Available online: http://www.goodnature.com.au/ (accessed on 23 March 2023).
- Minter, A.; Costa, F.; Khalil, H.; Childs, J.; Diggle, P.; Ko, A.I.; Begon, M. Optimal Control of Rat-Borne Leptospirosis in an Urban Environment. Front. Ecol. Evol. 2019, 7, 209. [Google Scholar] [CrossRef]
- Muteba, F.; Djouani, K.; Olwal, T. A Comparative Survey Study on LPWA IoT Technologies: Design, Considerations, Challenges and Solutions. Procedia Comput. Sci. 2019, 155, 636–641. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A Comparative Study of LPWAN Technologies for Large-Scale IoT Deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Torroglosa-Garcia, E.M.; Calero, J.M.A.; Bernabe, J.B.; Skarmeta, A. Enabling Roaming across Heterogeneous IoT Wireless Networks: LoRaWAN MEETS 5G. IEEE Access 2020, 8, 103164–103180. [Google Scholar] [CrossRef]
- Citoni, B.; Fioranelli, F.; Imran, M.A.; Abbasi, Q.H. Internet of Things and LoRaWAN-Enabled Future Smart Farming. IEEE Internet Things Mag. 2019, 2, 14–19. [Google Scholar] [CrossRef]
- Sanchez-Iborra, R.; Cano, M.-D. State of the Art in LP-WAN Solutions for Industrial IoT Services. Sensors 2016, 16, 708. [Google Scholar] [CrossRef]
- Aqeel-ur-Rehman, S.U.R.; Khan, I.U.; Moiz, M.; Hasan, S. Security and Privacy Issues in IoT. Int. J. Commun. Netw. Inf. Secur. (IJCNIS) 2016, 8, 147–157. [Google Scholar]
- Morin, E.; Maman, M.; Guizzetti, R.; Duda, A. Comparison of the Device Lifetime in Wireless Networks for the Internet of Things. IEEE Access 2017, 5, 7097–7114. [Google Scholar] [CrossRef]
- Siekkinen, M.; Hiienkari, M.; Nurminen, J.K.; Nieminen, J. How Low Energy Is Bluetooth Low Energy? Comparative Measurements with Zigbee/802.15. 4. In Proceedings of the 2012 IEEE wireless communications and networking conference workshops (WCNCW), Paris, France, 1 April 2012; pp. 232–237. [Google Scholar]
- Ugwuanyi, S.; Paul, G.; Irvine, J. Survey of IoT for Developing Countries: Performance Analysis of LoRaWAN and Cellular NB-IoT Networks. Electronics 2021, 10, 2224. [Google Scholar] [CrossRef]
- Seller, O.B.; Sornin, N. Low Power Long Range Transmitter. US9252834B2, 2 February 2016. [Google Scholar]
- LoRaWAN Technology. Available online: https://www.semtech.com/lora/lorawan-standard (accessed on 16 April 2023).
- Tan, J.; Wang, X.; Cai, S.; He, F.; Zhang, D.; Li, D.; Zhu, X.; Zhou, L.; Fan, N.; Liu, X. C3 Transferase-Expressing ScAAV2 Transduces Ocular Anterior Segment Tissues and Lowers Intraocular Pressure in Mouse and Monkey. Mol. Ther. -Methods Clin. Dev. 2020, 17, 143–155. [Google Scholar] [CrossRef]
- Hossain, M.I.; Markendahl, J.I. Comparison of LPWAN Technologies: Cost Structure and Scalability. Wirel Pers. Commun. 2021, 121, 887–903. [Google Scholar] [CrossRef]
- Reynders, B.; Pollin, S. Chirp Spread Spectrum as a Modulation Technique for Long Range Communication. In Proceedings of the 2016 Symposium on Communications and Vehicular Technologies (SCVT), Mons, Belgium, 22 November 2016; pp. 1–5. [Google Scholar]
- Reynders, B.; Meert, W.; Pollin, S. Power and Spreading Factor Control in Low Power Wide Area Networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Cattani, M.; Boano, C.A.; Römer, K. An Experimental Evaluation of the Reliability of Lora Long-Range Low-Power Wireless Communication. J. Sens. Actuator Netw. 2017, 6, 7. [Google Scholar] [CrossRef]
- LoRaWAN® 1.0.4 Specification Package - LoRa Alliance®, n.d. Available online: https://lora-alliance.org/resource_hub/lorawan-104-specification-package/ (accessed on 19 April 2023).
- Spadaccino, P.; Crinó, F.G.; Cuomo, F. LoRaWAN Behaviour Analysis through Dataset Traffic Investigation. Sensors 2022, 22, 2470. [Google Scholar] [CrossRef] [PubMed]
- Liang, R.; Zhao, L.; Wang, P. Performance Evaluations of LoRa Wireless Communication in Building Environments. Sensors 2020, 20, 3828. [Google Scholar] [CrossRef] [PubMed]
- Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Jawad, A.M.; Ismail, M. Energy-Efficient Wireless Sensor Networks for Precision Agriculture: A Review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.-W.; Chen, J.-L. Toward Intelligent Agriculture Service Platform with Lora-Based Wireless Sensor Network. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Tokyo, Japan, 13–17 April 2018; pp. 204–207. [Google Scholar]
- Andrade, R.O.; Yoo, S.G. A Comprehensive Study of the Use of LoRa in the Development of Smart Cities. Appl. Sci. 2019, 9, 4753. [Google Scholar] [CrossRef]
- Pasolini, G.; Buratti, C.; Feltrin, L.; Zabini, F.; De Castro, C.; Verdone, R.; Andrisano, O. Smart City Pilot Projects Using LoRa and IEEE802. 15.4 Technologies. Sensors 2018, 18, 1118. [Google Scholar] [CrossRef]
- Leonardi, L.; Battaglia, F.; Patti, G.; Bello, L. Lo Industrial LoRa: A Novel Medium Access Strategy for LoRa in Industry 4.0 Applications. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 4141–4146. [Google Scholar]
- Sharma, V.; You, I.; Pau, G.; Collotta, M.; Lim, J.D.; Kim, J.N. LoRaWAN-Based Energy-Efficient Surveillance by Drones for Intelligent Transportation Systems. Energies 2018, 11, 573. [Google Scholar] [CrossRef]
- Catherwood, P.A.; Steele, D.; Little, M.; Mccomb, S.; McLaughlin, J. A Community-Based IoT Personalized Wireless Healthcare Solution Trial. IEEE J. Transl. Eng. Health Med. 2018, 6, 1–13. [Google Scholar] [CrossRef]
- Yim, D.; Chung, J.; Cho, Y.; Song, H.; Jin, D.; Kim, S.; Ko, S.; Smith, A.; Riegsecker, A. An Experimental LoRa Performance Evaluation in Tree Farm. In Proceedings of the 2018 IEEE sensors applications Symposium (SAS), Xi’an, China, 19–20 November 2018; pp. 1–6. [Google Scholar]
- Davcev, D.; Mitreski, K.; Trajkovic, S.; Nikolovski, V.; Koteli, N. IoT Agriculture System Based on LoRaWAN. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–4. [Google Scholar]
- Alghamdi, A.M.; Khairullah, E.F.; Al Mojamed, M.M. LoRaWAN Performance Analysis for a Water Monitoring and Leakage Detection System in a Housing Complex. Sensors 2022, 22, 7188. [Google Scholar] [CrossRef]
- Ould, S.; Guertler, M.; Hanna, P.; Bennett, N.S. Internet-of-Things-Enabled Smart Bed Rail for Application in Hospital Beds. Sensors 2022, 22, 5526. [Google Scholar] [CrossRef]
- Nibali, A.; Ross, R.; Parsons, L. Remote Monitoring of Rodenticide Depletion. IEEE Internet Things J. 2019, 6, 7116–7121. [Google Scholar] [CrossRef]
- Ross, R.; Parsons, L.; Thai, B.S.; Hall, R.; Kaushik, M. An IOT Smart Rodent Bait Station System Utilizing Computer Vision. Sensors 2020, 20, 4670. [Google Scholar] [CrossRef]
- RP002-1.0.0 LoRaWAN Regional Parameters. Available online: www.lora-alliance.org (accessed on 23 March 2023).
















| Technology | Zigbee | Bluetooth | WiFi | Cellular | LoRa |
|---|---|---|---|---|---|
| Standard | IEEE 802.15.4 | IEEE 802.15.1 | IEEE 802.15.11 ah | 3GPP | IEEE 802.15g |
| Network Type | Mesh | P2P | WLAN | GERAN | LPWAN |
| Spectrum | 2.4 GHz | 2.4 GHz | 2.4–5 GHz | 700–2600 MHz | 433,868–915,923 MHz |
| Data Rate | 0.25 Mbps | 1 Mbps | 5 Gbps | 0.1–1 Gbps | 250 Kbps |
| Max. Coverage | 80 m | 10 m | 100 m | 30 km | 10 km |
| Module Status | Average Current | Ratio of Daily PC | Time Period |
|---|---|---|---|
| Sensing Mode | 37.8 mA | 33.33% (8 h per day) | 8 p.m.–4 a.m. |
| Communicating Mode | 86.8 mA | 0.036% (30 s per day) | 8 p.m.–4 a.m. |
| Sleeping Mode | 2 mA | 66.66% (16 h per day) | 4 a.m.–8 p.m. |
| Total Average Current | 37.8 × 33.33% + 86.8 × 0.036% + 2 × 66.66% = 13.96 mA | ||
| Parameter | Value |
|---|---|
| Center frequency | 433 MHz |
| Bandwidth | 250 KHz |
| Coding rate | 4/5 |
| Spreading factor (SF) | 12 |
| Output power | 14 dBm |
| Item | Amount | Cost (USD) |
|---|---|---|
| Outer mold | 1 | 2 |
| LoRa Module | 1 | 4.8 |
| LoRa Antenna | 1 | 3 |
| Microcontroller | 1 | 4 |
| IR Emitter | 2 | 0.2 |
| IR Receiver | 2 | 1 |
| Batteries (18,650) | 2 | 25 |
| Miscellaneous | - | 3 |
| Total | - | 43 |
| Item | Amount | Cost (USD) |
|---|---|---|
| Outer mold | 1 | 2 |
| LoRa Module | 1 | 5.5 |
| LoRa Antenna | 1 | 3 |
| Microcontroller | 1 | 6.5 |
| Total | - | 17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, S.-C.; Wang, S.-T.; Liu, K.-L.; Wu, C.-Y. A Remote Monitoring System for Rodent Infestation Based on LoRaWAN. Sensors 2023, 23, 4185. https://doi.org/10.3390/s23094185
Lai S-C, Wang S-T, Liu K-L, Wu C-Y. A Remote Monitoring System for Rodent Infestation Based on LoRaWAN. Sensors. 2023; 23(9):4185. https://doi.org/10.3390/s23094185
Chicago/Turabian StyleLai, Shin-Chi, Szu-Ting Wang, Kuan-Lin Liu, and Chang-Yu Wu. 2023. "A Remote Monitoring System for Rodent Infestation Based on LoRaWAN" Sensors 23, no. 9: 4185. https://doi.org/10.3390/s23094185
APA StyleLai, S. -C., Wang, S. -T., Liu, K. -L., & Wu, C. -Y. (2023). A Remote Monitoring System for Rodent Infestation Based on LoRaWAN. Sensors, 23(9), 4185. https://doi.org/10.3390/s23094185