
Research of a Cross-Interference Suppression Method for Piezoresistive Three-Dimensional Force Sensor


Abstract
:1. Introduction
2. Principles and Methods
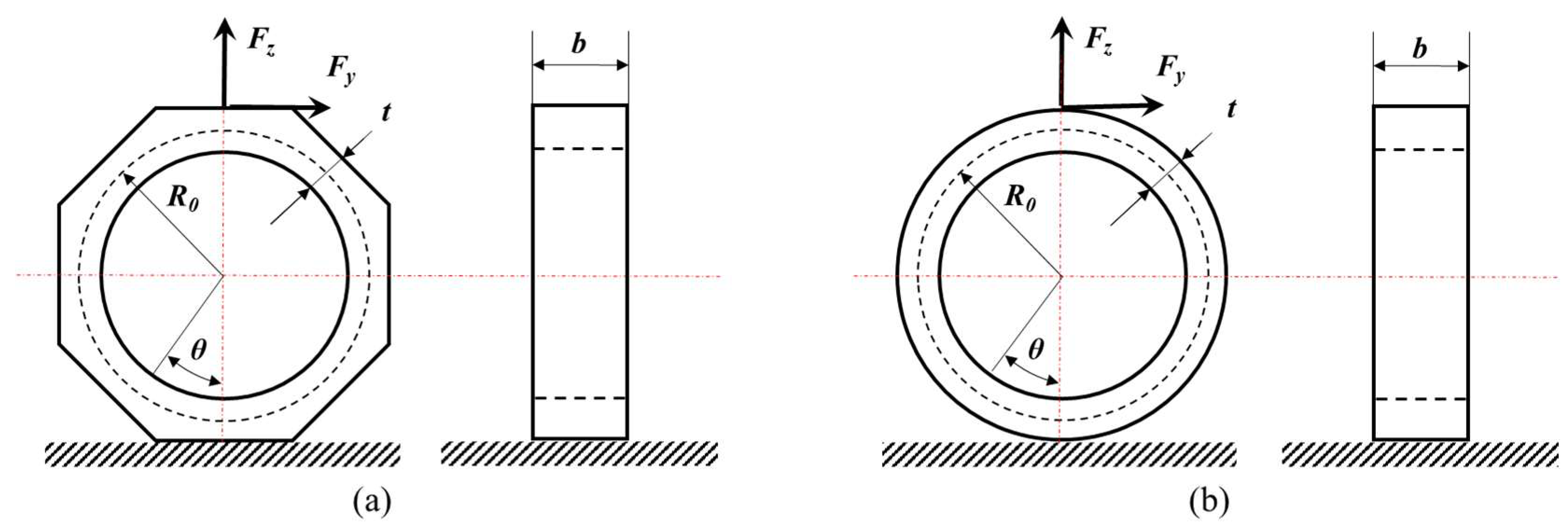
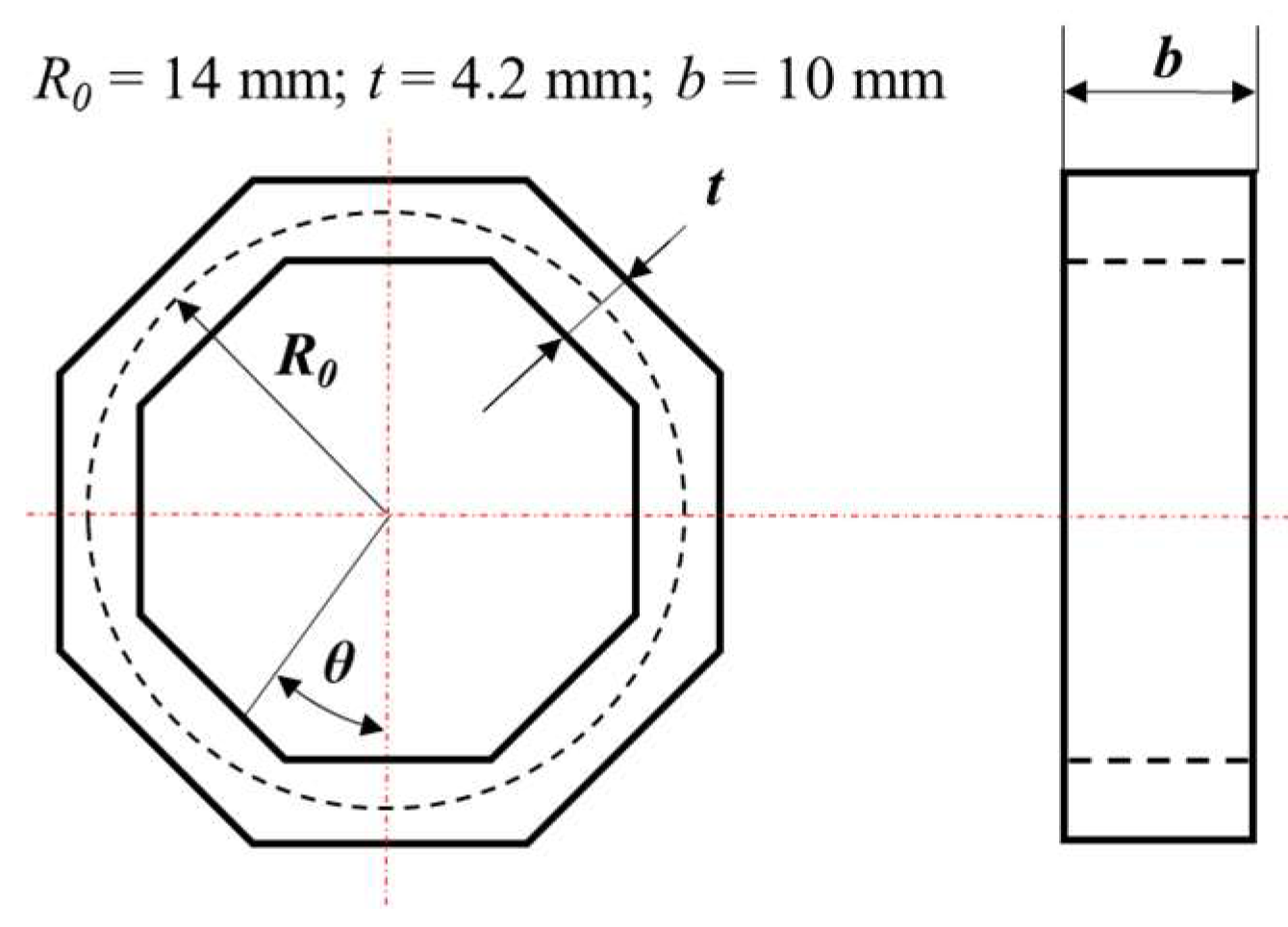
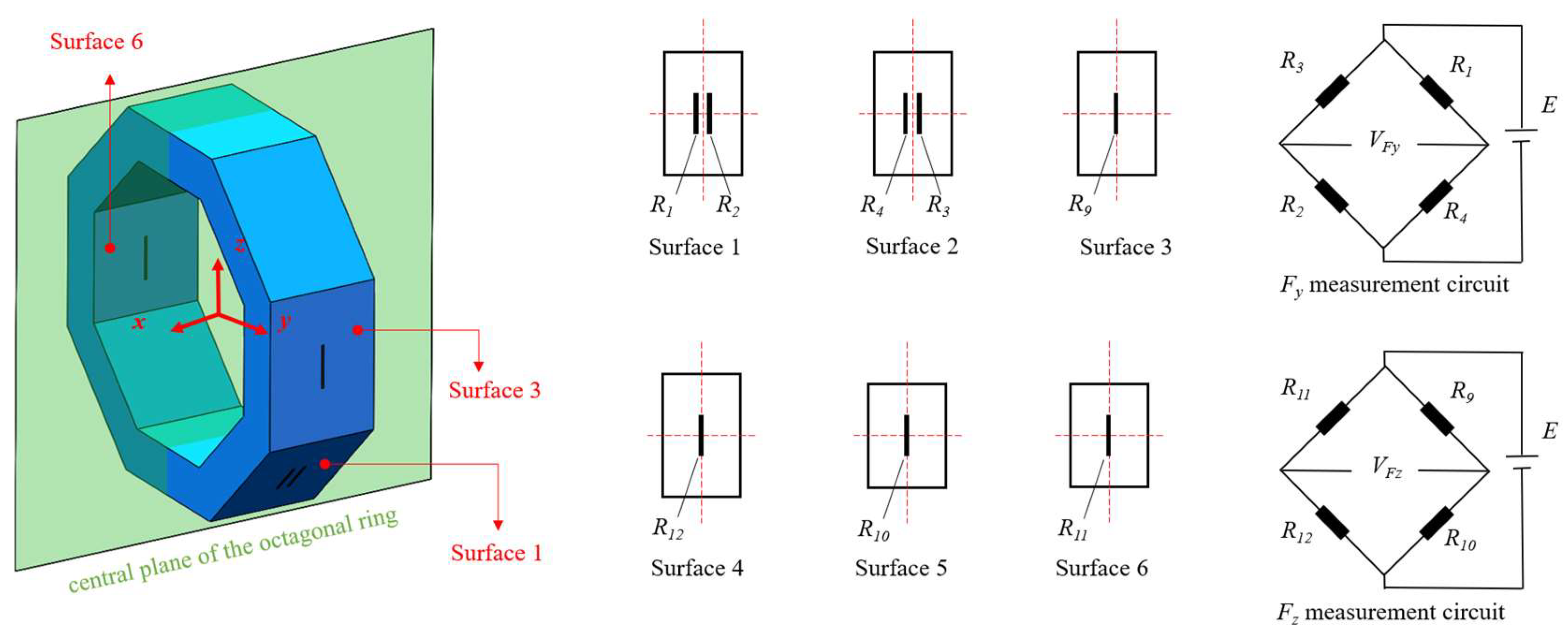
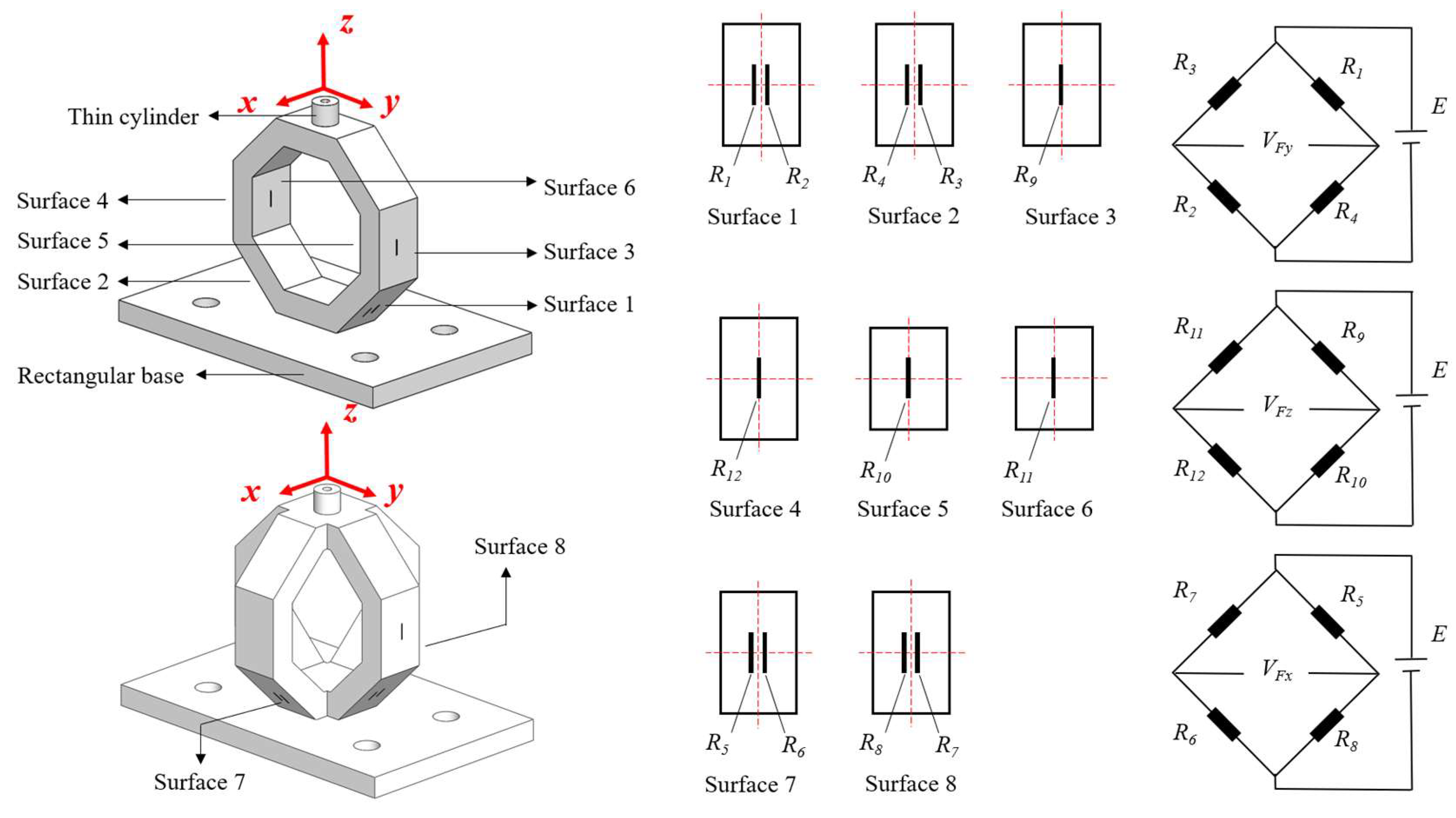
2.1. Elastic Deformation Element
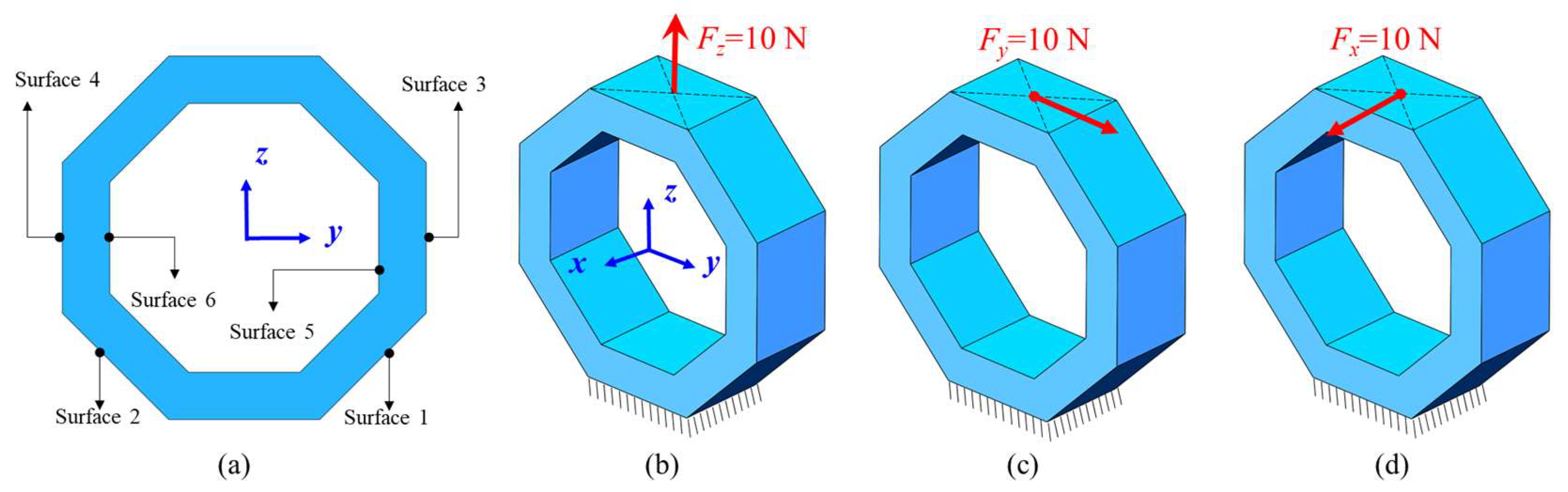
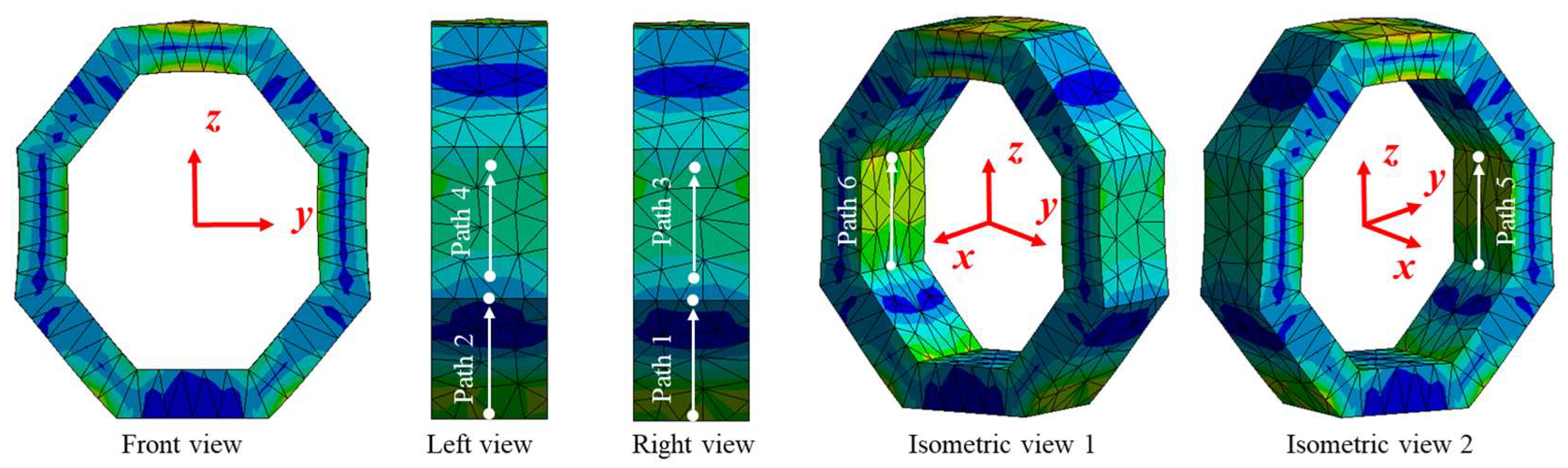
2.2. Finite Element Analysis of Octagonal Ring
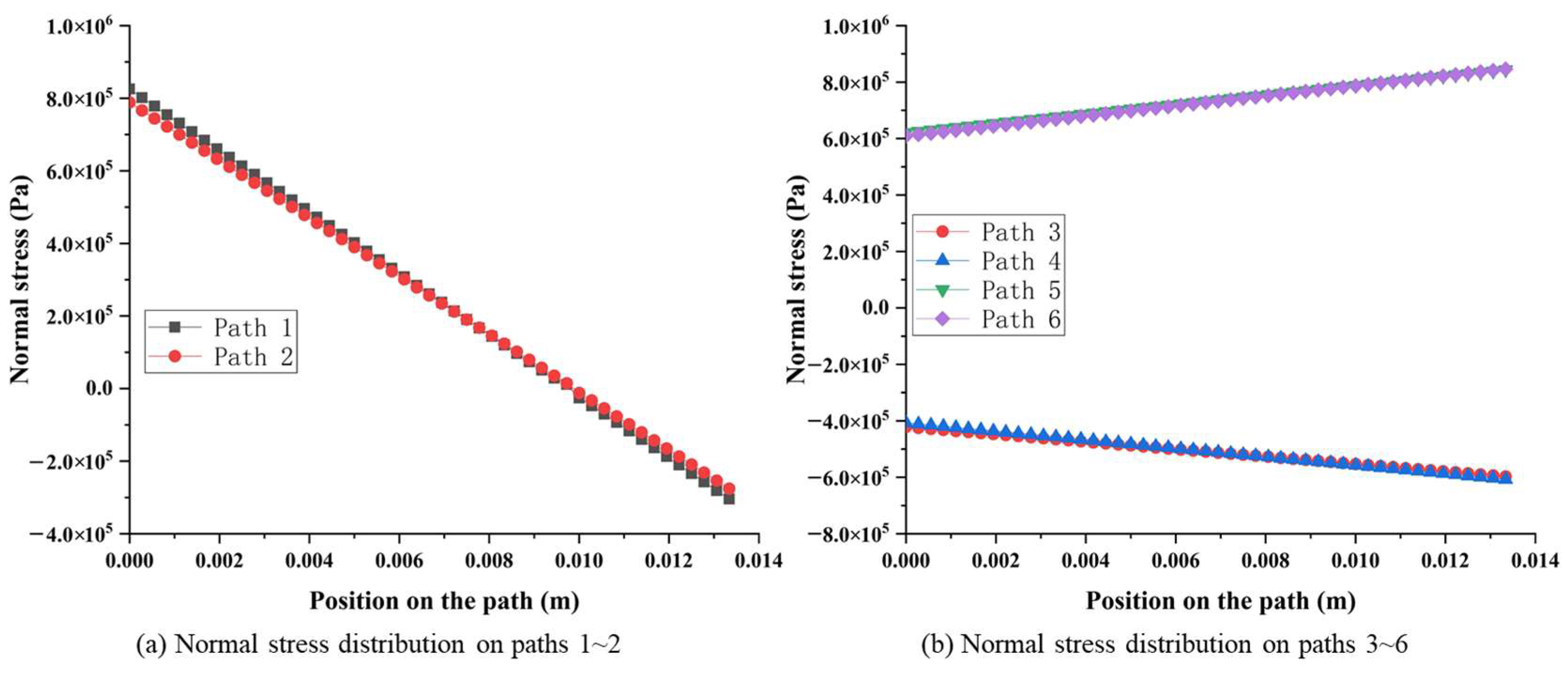
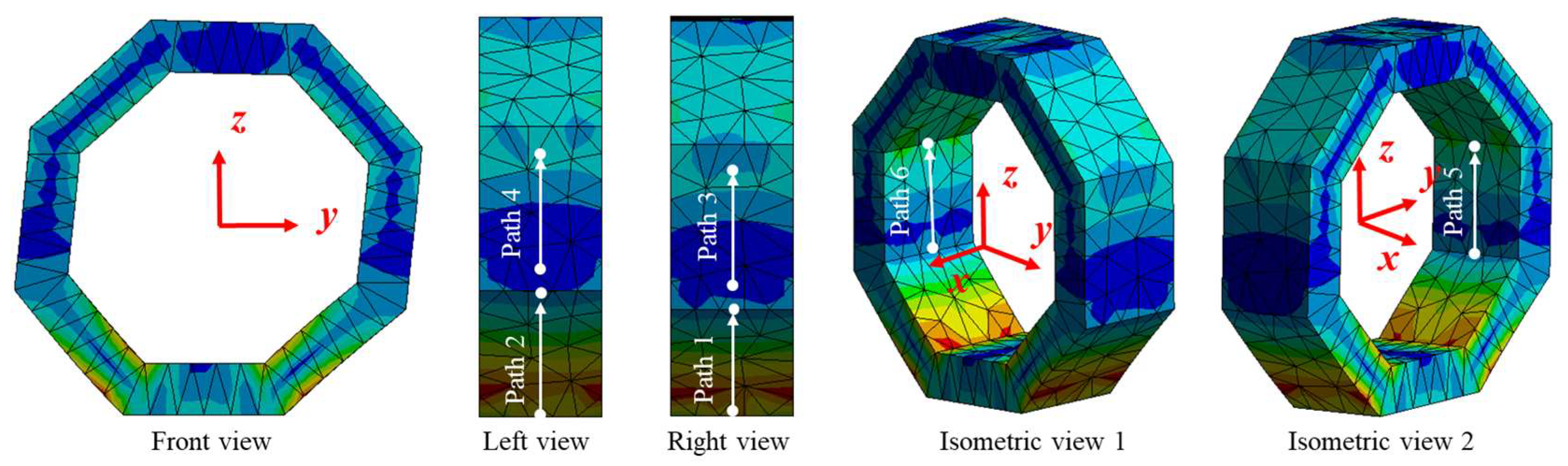
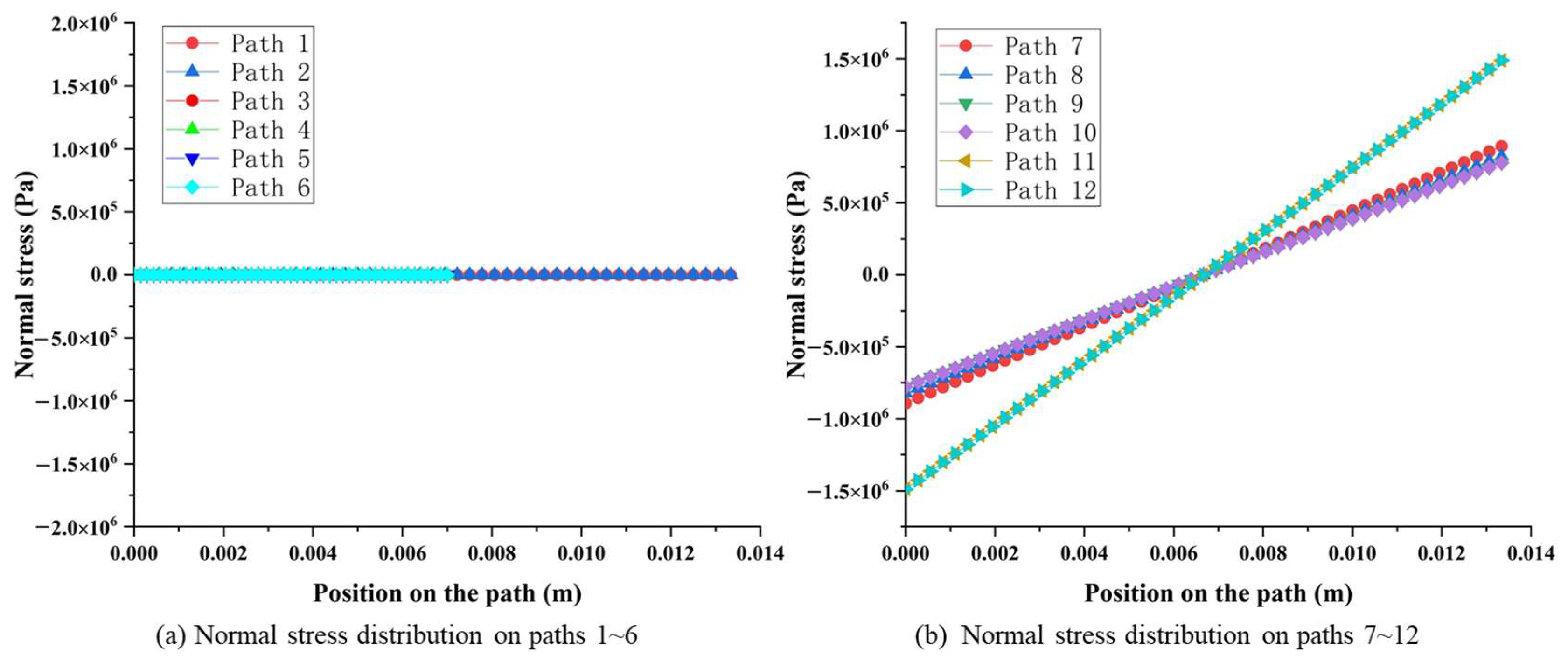
2.2.1. Surface Stress Distribution of Octagonal Ring under Fz
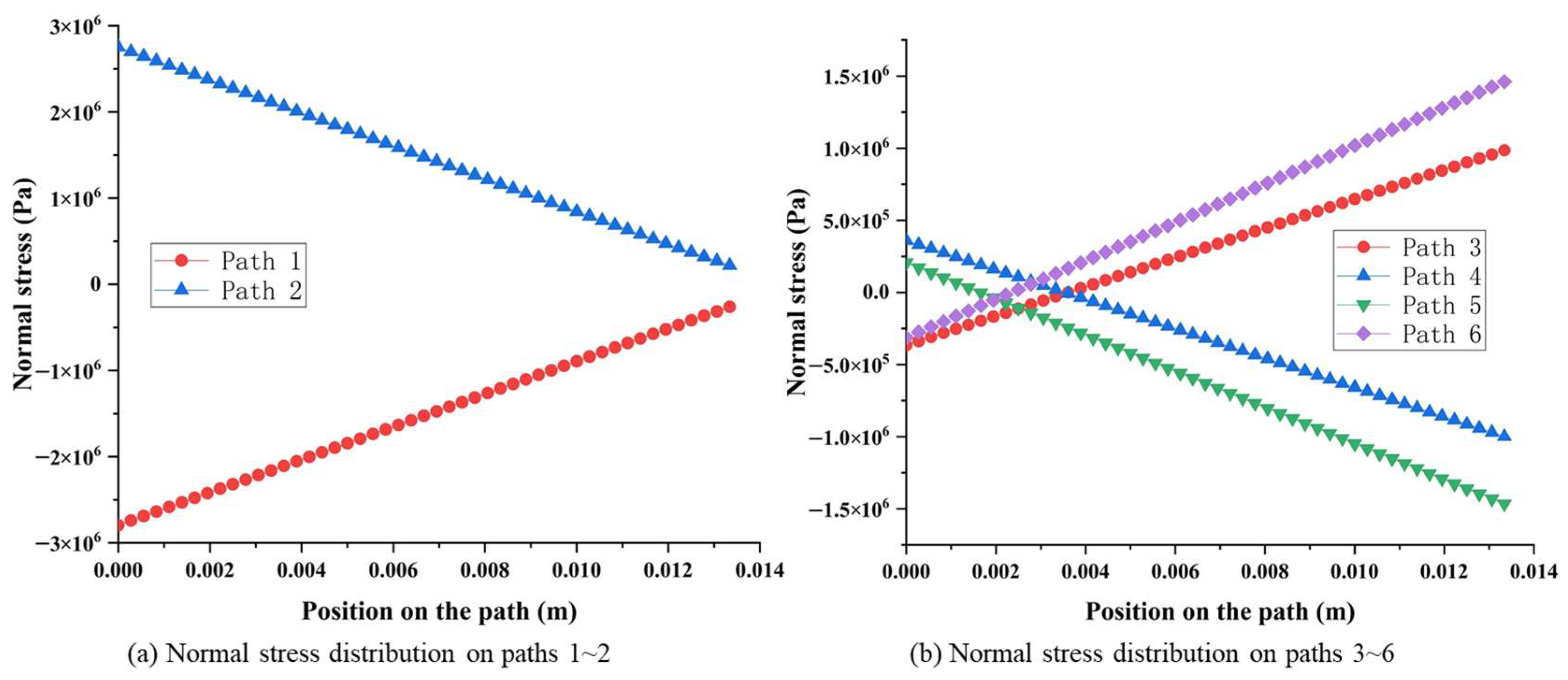
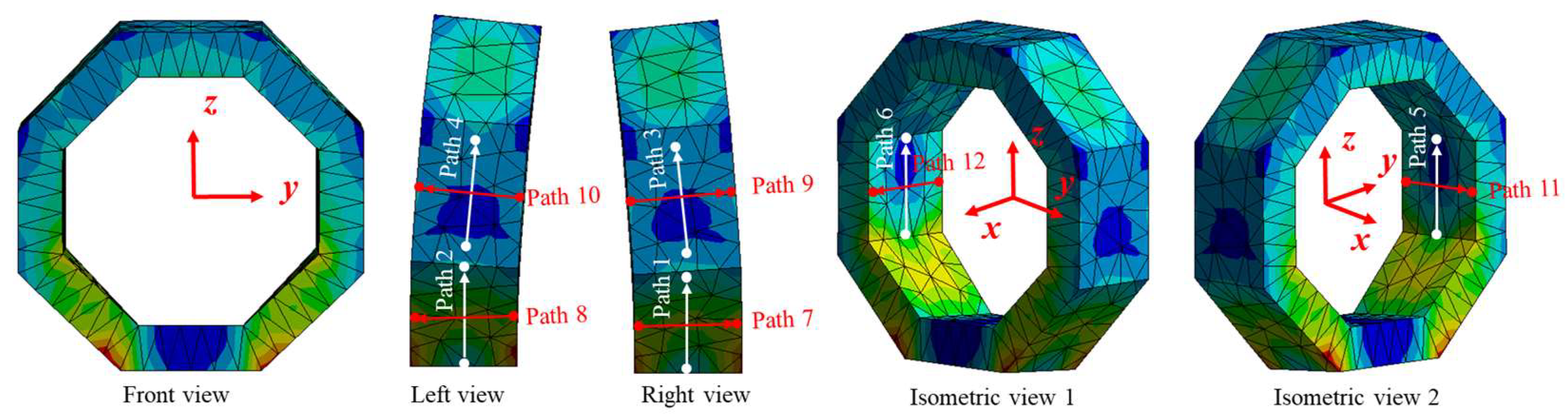
2.2.2. Surface Stress Distribution of Octagonal Ring under Fy
2.2.3. Surface Stress Distribution of Octagonal Ring under Fx
2.3. Cross-Interference Suppression Method
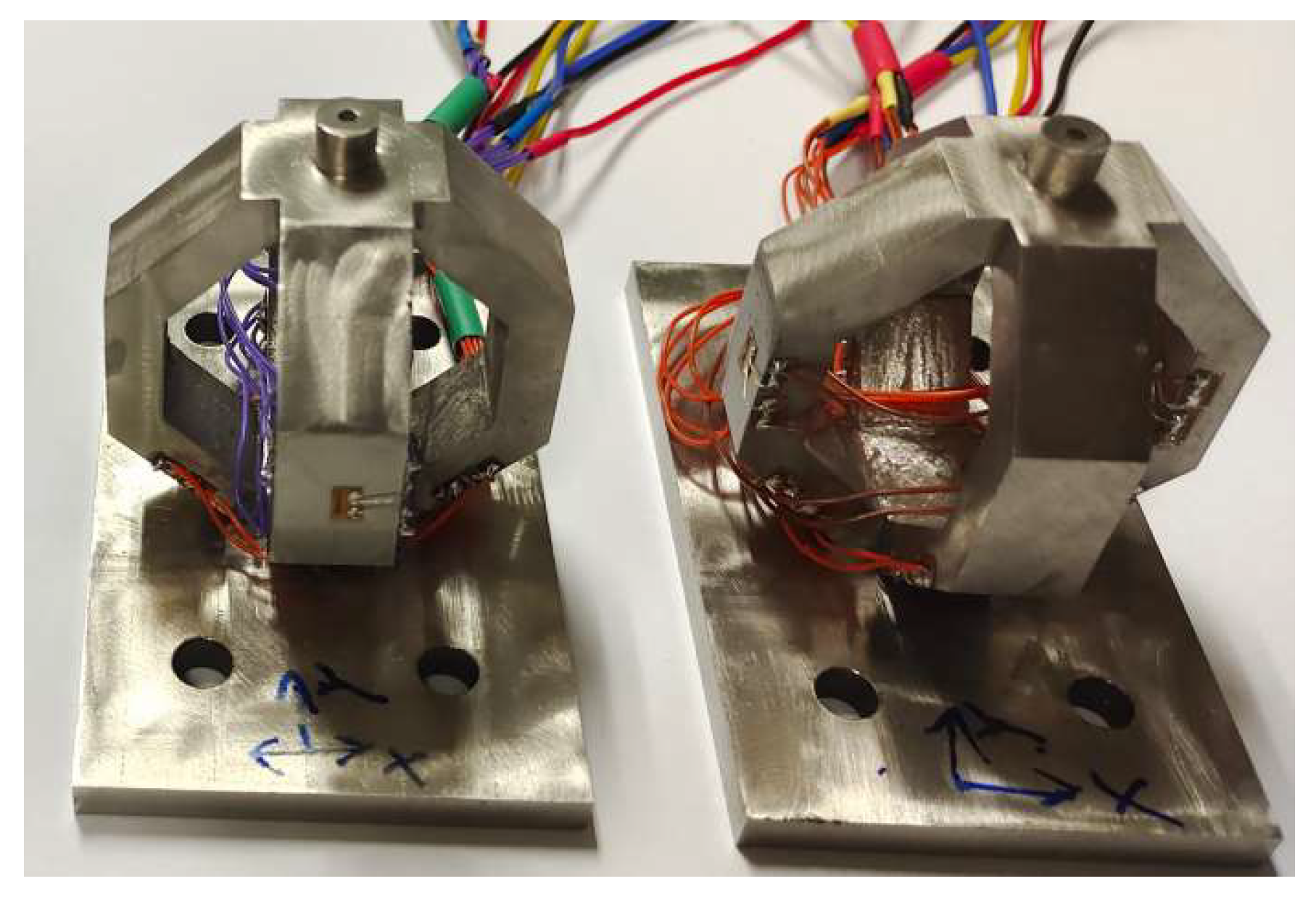
2.4. Sensor Design and Fabrication
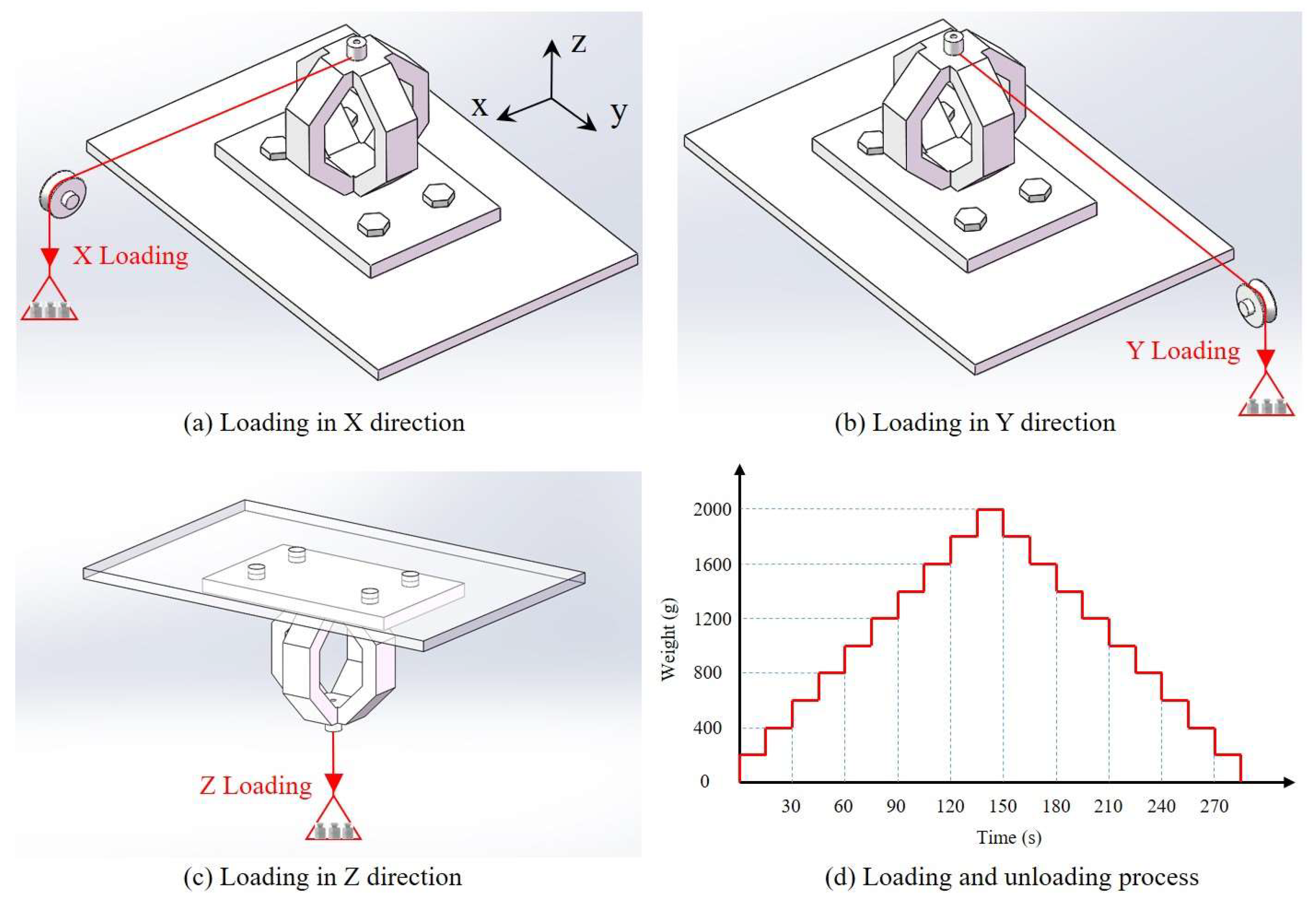
3. Test and Verification
3.1. Experiment Setup
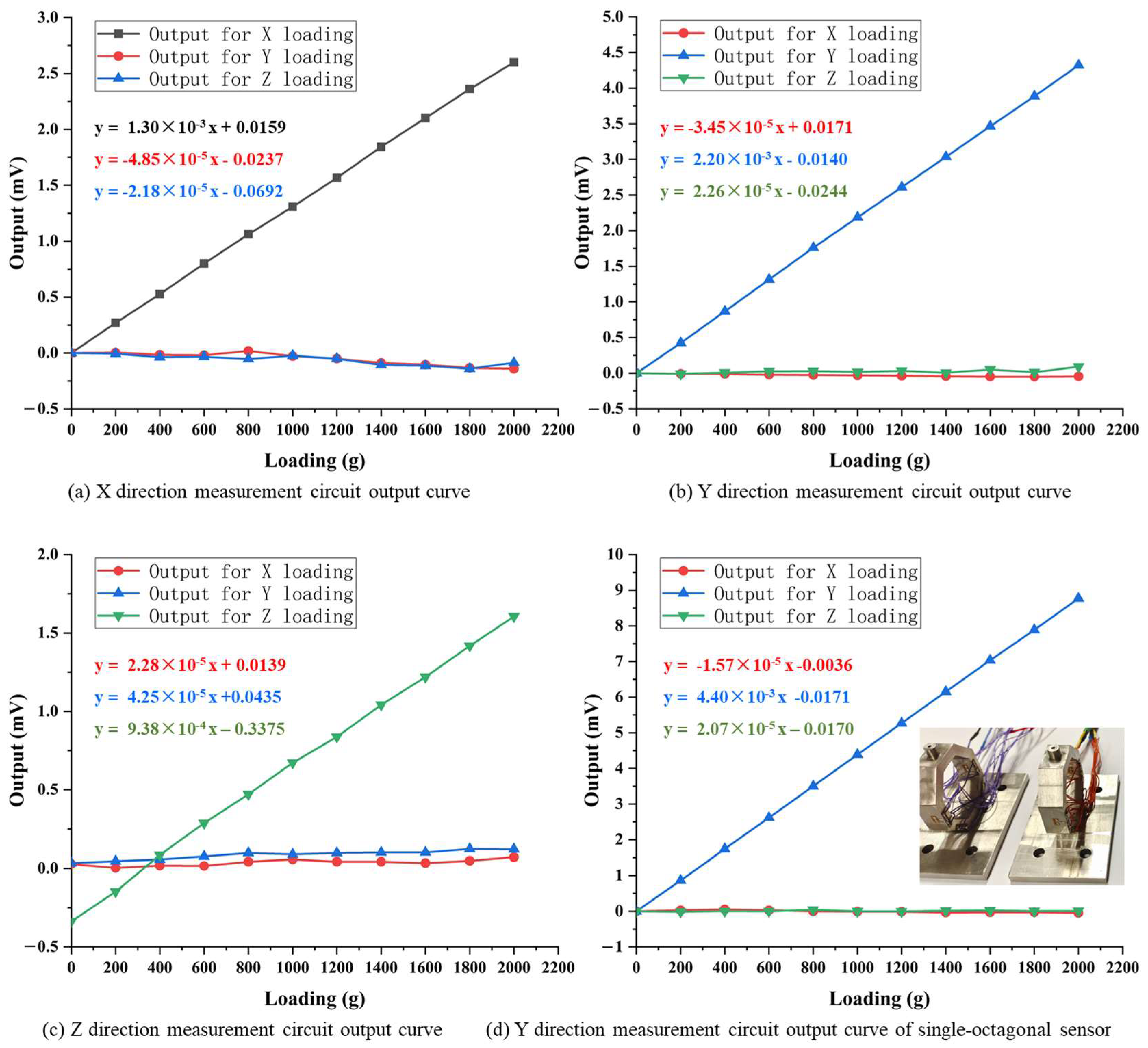
3.2. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tan, Y.; Fu, Y.; Wang, X.; Cong, M.; Ren, L. A T-Type Self-Decoupled and Passive Dynamic Tension and Torque Sensor: Design, Fabrication, and Experiments. IEEE Access 2020, 8, 203804–203813. [Google Scholar] [CrossRef]
- Mayetin, U.; Kucuk, S. A low cost 3-DOF force sensing unit design for wrist rehabilitation robots. Mechatronics 2021, 78, 102623. [Google Scholar] [CrossRef]
- Nguyen, D.D.; Kuo, C.H. Design and Optimization of a Joint Torque Sensor for Lightweight Robots. IEEE Sens. J. 2021, 21, 9788–9797. [Google Scholar] [CrossRef]
- Tang, Z.; Wang, S.; Li, M.; Shi, C. Development of a Distal Tri-Axial Force Sensor for Minimally Invasive Surgical Palpation. IEEE Trans. Med. Robot. Bionics 2022, 4, 145–155. [Google Scholar] [CrossRef]
- Ping, Z.; Zhang, T.; Gong, L.; Zhang, C.; Zuo, S. Miniature Flexible Instrument with Fibre Bragg Grating-Based Triaxial Force Sensing for Intraoperative Gastric Endomicroscopy. Ann. Biomed. Eng. 2021, 49, 2323–2336. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Qiu, Y.; Wang, X.; Jiang, L.; Lu, X.; Li, M.; Wang, Z.; Pang, K.; Tian, Y.; Zhang, W.; et al. Flexible six-dimensional force sensor inspired by the tenon-and-mortise structure of ancient Chinese architecture for orthodontics. Nano Energy 2022, 96, 107073. [Google Scholar] [CrossRef]
- Gong, Y.; Cheng, X.; Wu, Z.; Liu, Y.; Yu, P.; Hu, X. A Flexible Tactile Sensor Array for Dynamic Triaxial Force Measurement Based on Aligned Piezoresistive Nanofibers. IEEE Sens. J. 2021, 21, 21989–21998. [Google Scholar] [CrossRef]
- He, X.; Ran, Z.; Xiao, Y.; Xu, T.; Shen, F.; Ding, Z.; He, Z.; Rao, Y.; Zeng, D.; Chu, W.; et al. Three-dimensional force sensors based on all-fiber Fabry–Perot strain sensors. Opt. Commun. 2021, 490, 126694. [Google Scholar] [CrossRef]
- Li, K.J. New Sensor Technical Manual, 1st ed.; National Defense Industry Press: Beijing, China, 2002; pp. 31–489. [Google Scholar]
- Available online: https://www.kistler.com/zh/products/components/force-sensors/?pfv_metrics=metric (accessed on 29 September 2021).
- Li, J.; Zhang, Z.; Duan, B.; Sun, H.; Zhang, Y.; Yang, L.; Dai, M. Design and characterization of a miniature three-axial mems force sensor. J. Mech. Med. Biol. 2020, 20, 2040038. [Google Scholar] [CrossRef]
- He, Z.; Liu, T. Design of a three-dimensional capacitor-based six-axis force sensor for human-robot interaction. Sens. Actuators A Phys. 2021, 331, 112939. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, J.T.; Song, T.; Chu, Z. High-sensitive tactile sensor with triaxial force decoupling measurements. Guangxue Jingmi Gongcheng Opt. Precis. Eng. 2019, 27, 2410–2419. [Google Scholar]
- Pajhouh, M.; Azmoudeh, B. Developing T-Type Three Degree of Freedom Force Sensor to Estimate Wrist Muscles’ Forces. In Proceedings of the 2017 24th National and 2nd International Iranian Conference on Biomedical Engineering (ICBME), Tehran, Iran, 30 November–1 December 2017; p. 8430228. [Google Scholar]
- Liang, Q.; Zhang, D.; Song, Q.; Ge, Y.; Cao, H.; Ge, Y. Design and fabrication of a six-dimensional wrist force/torque sensor based on E-type membranes compared to cross beams. Measurement 2010, 43, 1702–1719. [Google Scholar] [CrossRef]
- Sun, S.; Yu, J.; Han, Y.; Liao, C.; Dang, X. FBG sensor of double-layer cross beam structure based on SSA-ELM three-dimensional force decoupling. Guangxue Jingmi Gongcheng Opt. Precis. Eng. 2022, 30, 274–285. [Google Scholar]
- Song, Y.; Wang, F.; Zhang, Z. Decoupling Research of a Novel Three-Dimensional Force Flexible Tactile Sensor Based on an Improved BP Algorithm. Micromachines 2018, 9, 236. [Google Scholar] [CrossRef]
- Song, A.; Liyue, F.U. Multi-dimensional force sensor for haptic interaction: A review. Virtual Real. Intell. Hardw. 2019, 1, 121–135. [Google Scholar] [CrossRef]
- Stefanescu, D.M. Strain sensitivity as selection criterion for elastic elements of force transducers: A brief review. Sens. Actuators A Phys. 2020, 315, 112238. [Google Scholar] [CrossRef]
- Yaldız, S.; Ünsaçar, F.; Sağlam, H.; Işık, H. Design, development and testing of a four-component milling dynamometer for the measurement of cutting force and torque. Mech. Syst. Signal Process. 2007, 21, 1499–1511. [Google Scholar] [CrossRef]
- Yaldiz, S.; Unsacar, F. A dynamometer design for measurement the cutting forces on turning. Measurement 2006, 39, 80–89. [Google Scholar] [CrossRef]
- Kroencke, M.; Hull, M.L. A method for designing multiload component dynamometers incorporating octagonal strain rings. Exp. Mech. 1989, 29, 195–204. [Google Scholar] [CrossRef]
- Brewer, R.M.; Hull, M.L. The effect of interface plate compliance on dynamometers incorporating octagonal strain rings. Exp. Mech. 1995, 35, 337–344. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, B.; Ren, B.; Tu, D.; Wang, Z.; Wang, C.; Zheng, Y.; Li, X.; Wang, D.; Ren, Z.; et al. Smart Mechanoluminescent Phosphors: A Review of Strontium-Aluminate-Based Materials, Properties, and Their Advanced Application Technologies. Adv. Sci. 2023, 10, 2204925. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density | Tensile Yield Strength | Compressive Yield Strength | Bulk Modulus |
| Structural steel | 7852 kg/m3 | 2.5 × 108 Pa | 2.5 × 108 Pa | 1.6667 × 1011 Pa |
| Shear Modulus | Young’s Modulus | Tensile Ultimate Strength | Compressive Ultimate Strength | Poisson’s Ratio |
| 7.692 × 1010 Pa | 2.0 × 1011 Pa | 4.6 × 108 Pa | 0 Pa | 0.3 |
| Force | Resistance Variation | |||||||
|---|---|---|---|---|---|---|---|---|
| R1 | R2 | R3 | R4 | R9 | R10 | R11 | R12 | |
| Fy | −Δr1 | −Δr1 | +Δr1 | +Δr1 | +Δr2 | −Δr2 | +Δr2 | −Δr2 |
| Fz | +Δr3 | +Δr3 | +Δr3 | +Δr3 | −Δr4 | +Δr4 | +Δr4 | −Δr4 |
| Fx | −Δr5 | +Δr5 | −Δr5 | +Δr5 | 0 | 0 | 0 | 0 |
| Thin Cylinder | Octagonal Ring | Rectangular Base | ||||
|---|---|---|---|---|---|---|
| Diameter | Height | R0 | t | b | Size | Circular hole |
| 6 mm | 5 mm | 14 mm | 4.2 mm | 10 mm | 70 × 40 × 4 mm3 | Φ 7 mm |
| Resistance | Gauge Factor | Resistor Size | Base Size | Strain Limitation | Temperature |
|---|---|---|---|---|---|
| 1000 Ω | 150 ± 5% | 3.8 × 0.22 mm2 | 5.0 × 3.0 mm2 | 3000 με | <80 °C |
| Cross-Interference Error | Fy→Fx | Fz→Fx | Fx→Fy | Fz→Fy | Fx→Fz | Fy→Fz |
|---|---|---|---|---|---|---|
| 3D force sensor | −3.73% | −1.68% | −1.57% | 1.03% | 2.43% | 4.53% |
| Literatures | [9] | [10] | [11] | [12] | [13] | [14] | This Paper | |
|---|---|---|---|---|---|---|---|---|
| Cross-interference error | Maximum | 3% | 25% * | 40% * | 2.41% | 7.64% | 12.37% | 4.53% |
| Minimum | 1% | 4% * | / | 1.47% | 1.05% | 0.56% | 1.03% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Zhao, Y. Research of a Cross-Interference Suppression Method for Piezoresistive Three-Dimensional Force Sensor. Sensors 2023, 23, 4573. https://doi.org/10.3390/s23094573
Zhao Y, Zhao Y. Research of a Cross-Interference Suppression Method for Piezoresistive Three-Dimensional Force Sensor. Sensors. 2023; 23(9):4573. https://doi.org/10.3390/s23094573
Chicago/Turabian StyleZhao, You, and Yulong Zhao. 2023. "Research of a Cross-Interference Suppression Method for Piezoresistive Three-Dimensional Force Sensor" Sensors 23, no. 9: 4573. https://doi.org/10.3390/s23094573
APA StyleZhao, Y., & Zhao, Y. (2023). Research of a Cross-Interference Suppression Method for Piezoresistive Three-Dimensional Force Sensor. Sensors, 23(9), 4573. https://doi.org/10.3390/s23094573