4.1. Simulation Configuration
The simulation is divided into two steps. The first is to verify the feasibility of adding authentication messages. The next step is to optimize the clock error and reduce the bandwidth occupied by the clock error.
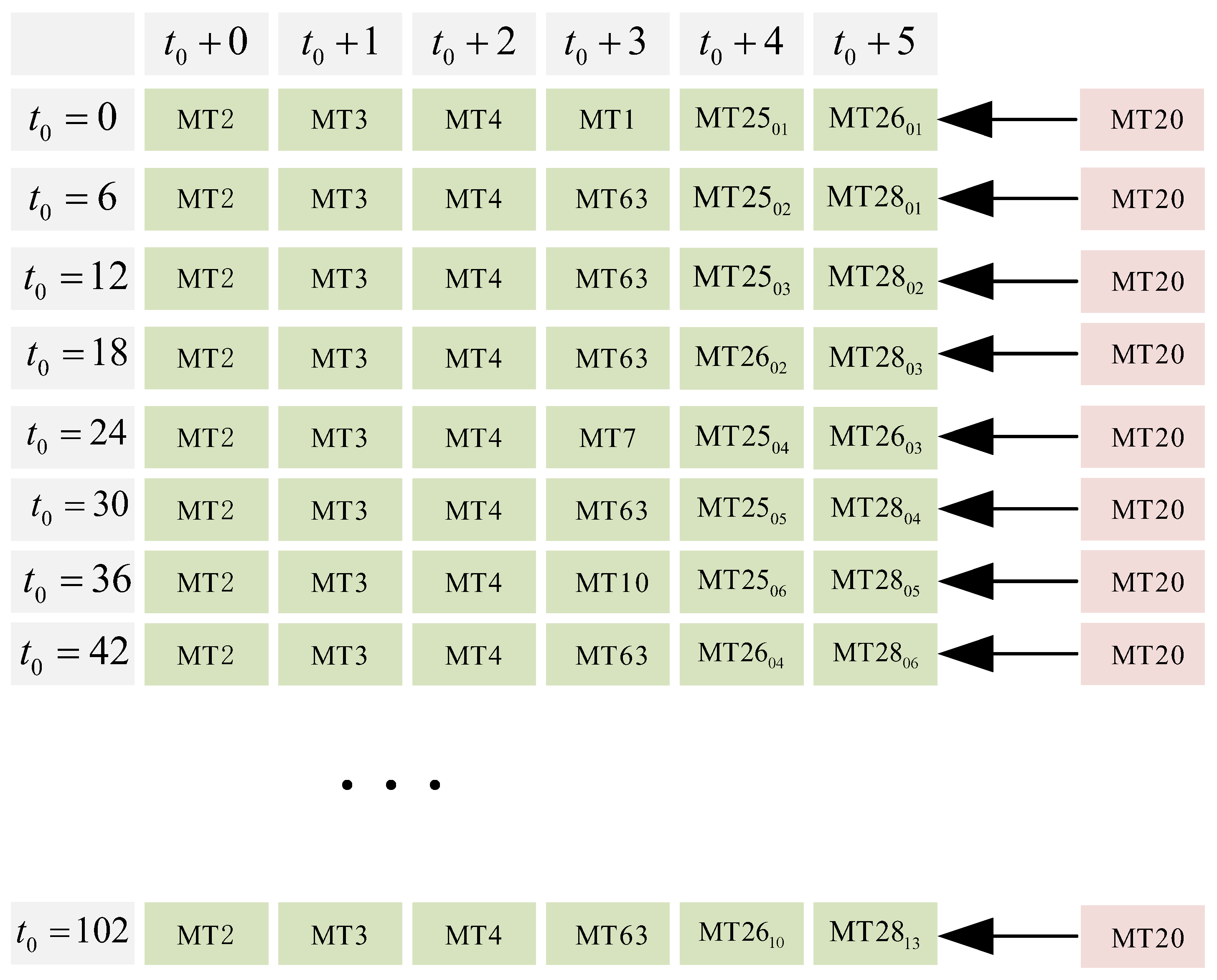
In order to verify the feasibility of adding authentication messages, the authentication message MT20 MT21 is added to the dynamic message schedule designed by Yun Y in Korea. Broadcast static MT1, fast correction messages (MT2, MT3 and MT4 with a broadcast period of 6 s), and authentication message MT20 in a fixed time sequence. The remaining messages are broadcast dynamically. This method is set as the base scheme.
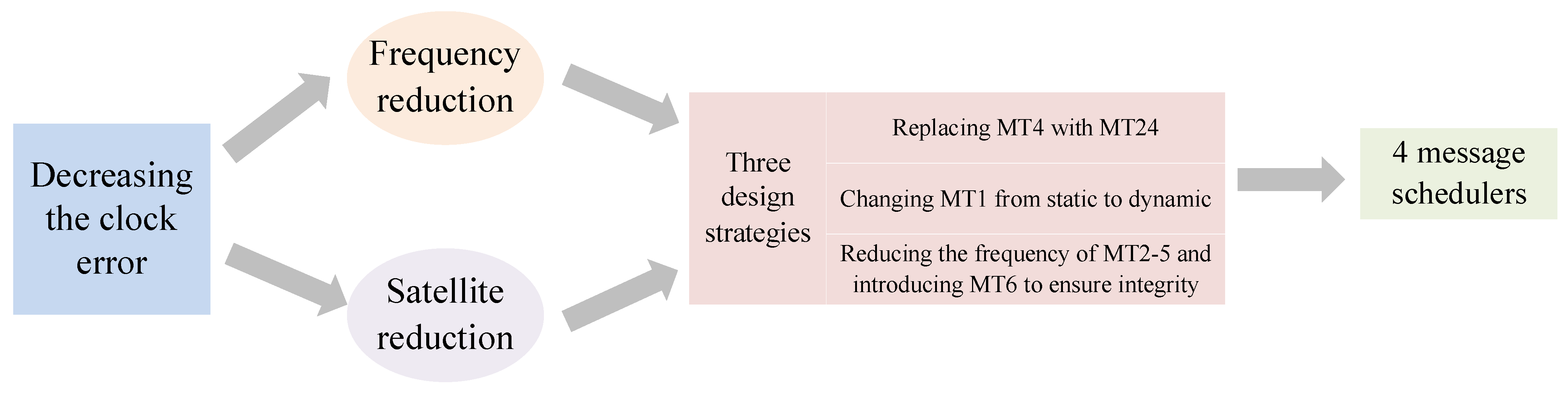
Further, reduce the bandwidth occupied by the clock error in order to mitigate the impact of the authentication message MT20, which occupies 1/6 of the bandwidth, on the SBAS service. There are two approaches: satellite reduction and frequency reduction. In the case of satellite reduction, on the base scheduler, replace MT4 with MT24 in scheduler 1; delete MT4 and change static MT1 to dynamic MT1 in scheduler 2. In the case of frequency reduction, on the base scheduler, reduce the frequency of MT2–4 to 60 s and add MT6 to ensure 6 s integrity in scheduler 3; delete MT4, reduce the frequency of MT2–3 to 60 s, and add MT6 to ensure 6 s integrity in scheduler 4.
Through the above simulation configuration, the feasibility of adding authentication messages is first verified, based on which four message schedulers are proposed and the optimal scheme is selected from them.
4.2. Simulation Process
The simulation includes fixed scheduling settings and dynamic scheduling settings.
Fixed scheduling settings mainly broadcast fast messages updated every 6 s, including MT2, MT3, MT24, and MT20, and messages updated every 120 s like MT1 and MT28.
Dynamic scheduling settings involve assigning different weights to message types that are not part of the fixed schedule. The specific policy is as follows:
- (1)
Prioritize broadcasting messages with the highest current weight value
Set the broadcast weight values for each message type, where the denominator of the weight value is the maximum update interval of the message in the ICAO regulations, and the numerator is the time interval since the last broadcast of that message type. When a new second begins, prioritize broadcasting the message type with the highest current weight value. After broadcasting, set the numerator of the weight value for that message type to 0 [
8].
- (2)
Prioritize broadcasting messages with smaller message priority indices
If multiple message types have the same weight value, select one of the message types for broadcasting based on their message priority index. The message priority index is related to the maximum valid duration of messages defined by the ICAO. The smaller the message priority index, the higher the priority, as shown in
Table 5.
During system initialization, it is necessary to read all the message types broadcast by the SBAS, the denominator values of the weighting coefficients for each message type (i.e., the maximum update interval defined in regulations) and the table corresponding to the priorities of each message type, and initialize all the numerator values of the message weights. After initializing the numerator values
Ai for each message type, these values are divided by the denominator values
Ti to calculate the weights
Wi, which will be used for comparison later.
With each second that passes, the numerator values for all message types increase by 1. Consequently, the weights for all message types involved in dynamic scheduling are updated. By comparing these updated weights, the message type with the highest weight is selected for broadcast. After broadcast, the numerator value for that message type is reset to 0.
If there are two identical maximum weights, the message with a higher priority, as defined in the message priority table, will be broadcast first. This method also considers message alarms and the situation where there is a change in the PRN number of a satellite.
4.3. Simulation Analysis
Simulation experiments include two aspects: first, adding authentication messages to the existing SBAS message scheduler to validate the feasibility of authentication messages; second, validating the four proposed schemes based on optimization strategies by evaluating metrics to select the best one.
- (1)
Basic scheme
To verify the addition of navigation authentication messages MT20 and MT21 on the basis of WAAS, an evaluation was performed based on the proportion of each message type and the maximum update interval for each message type, which lays the foundation for the subsequent optimization of the scheme after adding authentication. Previously, various schedulers did not include authentication messages. In this paper, the designed schedulers were improved by adding authentication messages and incorporating fixed time sequence messages MT1 and MT63, making more effective use of bandwidth.
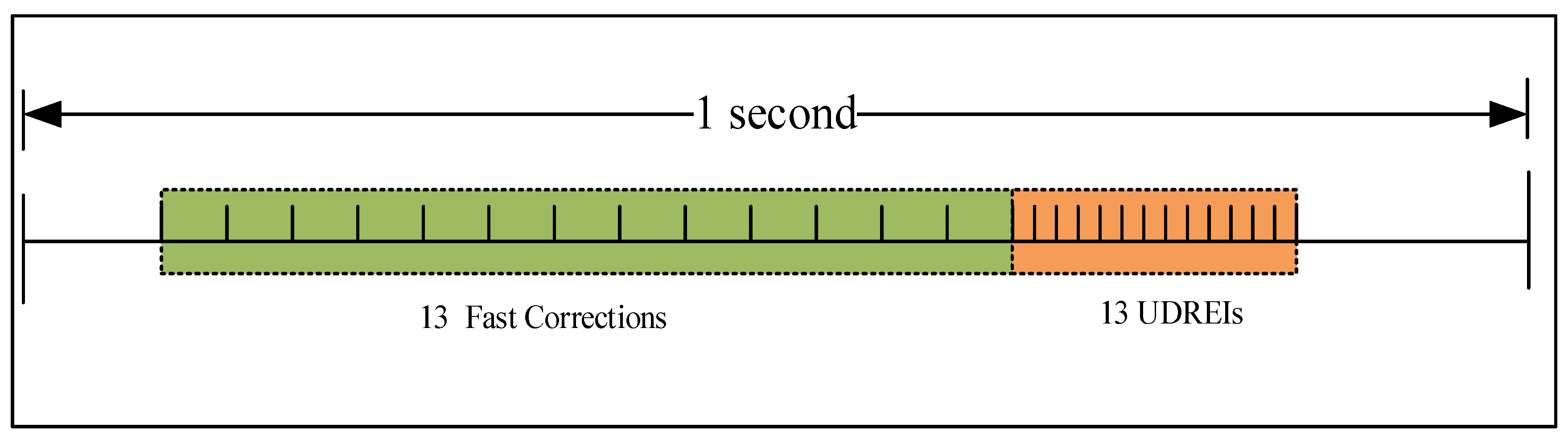
SBAS message scheduler includes broadcasting static MT1, fast correction messages (MT2, MT3 and MT4 with a broadcast period of 6 s), and authentication message MT20 using a fixed time sequence. The remaining messages are broadcast dynamically. The specific simulation results are shown in
Table 6 and
Table 7 below.
Table 6 shows the proportions of various message types. A comparison is made between the scheduler designed in this paper and the results of the dynamic message scheduler designed by Yun Y from South Korea. The WAAS scheme is the simulation result of the dynamic message scheduler of Yun. From the simulation results, it can be observed that the scheduler designed in this paper mainly achieves the inclusion of authentication messages by reducing the bandwidth allocated to dynamic messages MT25, MT26 and MT28, while retaining some redundancy in MT63. The following table is obtained:
Table 6.
Comparison of the proportions (%) of various message types before and after adding authentication messages to the WAAS messages.
Table 6.
Comparison of the proportions (%) of various message types before and after adding authentication messages to the WAAS messages.
| Scheme | MT2 | MT3 | MT4 | MT25 | MT26 | MT28 |
|---|
| WAAS | 16.67 | 16.67 | 16.67 | 12.9 | 8.0 | 9.8 |
| the scheduler designed in this paper | 16.67 | 16.67 | 16.67 | 3.01 | 1.30 | 3.01 |
| Scheme | MT63 | MT20 | MT21-1 | MT21-2 | MT21-3 | etc. |
| WAAS | 11.5 | - | - | - | - | 7.73 |
| the scheduler designed in this paper | 8.33 | 16.67 | 3.01 | 1.11 | 1.11 | 12.46 |
The “percentage of each message type” in the table refers to the ratio of the number of times the message is received in the simulation within a certain period of time to the total number of times the simulation is performed. And “etc.” includes MT1, MT7, MT9, MT10, MT17, and MT18.
Table 7.
Comparison of the maximum update intervals (s) for each message type before and after adding authentication messages to the WAAS messages.
Table 7.
Comparison of the maximum update intervals (s) for each message type before and after adding authentication messages to the WAAS messages.
| Scheme | MT2 | MT3 | MT4 | MT25 | MT26 | MT28 | MT63 | MT20 | MT21-1 | MT21-2 | MT21-3 |
|---|
| WAAS | 6 | 6 | 6 | 85 | 288 | 103 | Not mentioned | - | - | - | - |
| the scheduler designed in this paper | 6 | 6 | 6 | 37 | 89 | 42 | 12 | 6 | 37 | 101 | 103 |
According to
Table 6, the proportions of MT25, MT26, and MT28 have significantly decreased, collectively decreasing by approximately 23%. This bandwidth reduction can be allocated to accommodate authentication messages. With the addition of authentication messages, the proportion of MT63 is controlled at 8.33%, reducing null messages and improving bandwidth utilization while maintaining a certain level of redundancy, thus providing feasibility for adding new functionality. As shown in
Table 7, after adding authentication messages, the maximum update intervals for each message type still meet the maximum update intervals stipulated by the ICAO. Dynamic messages such as MT25, MT26, and MT28 exhibit a phenomenon where their proportions decrease while their maximum update intervals decrease as well. This occurs because dynamic messages are not broadcast in a fixed proportion but rather based on weight values and priorities. This can lead to a decrease in proportion and a reduction in the maximum update interval. By efficiently utilizing bandwidth while adhering to the ICAO maximum update interval requirements, the addition of authentication messages to existing messages may be considered.
- (2)
Comparison and analysis of four fixed time sequence dynamic message schedulers
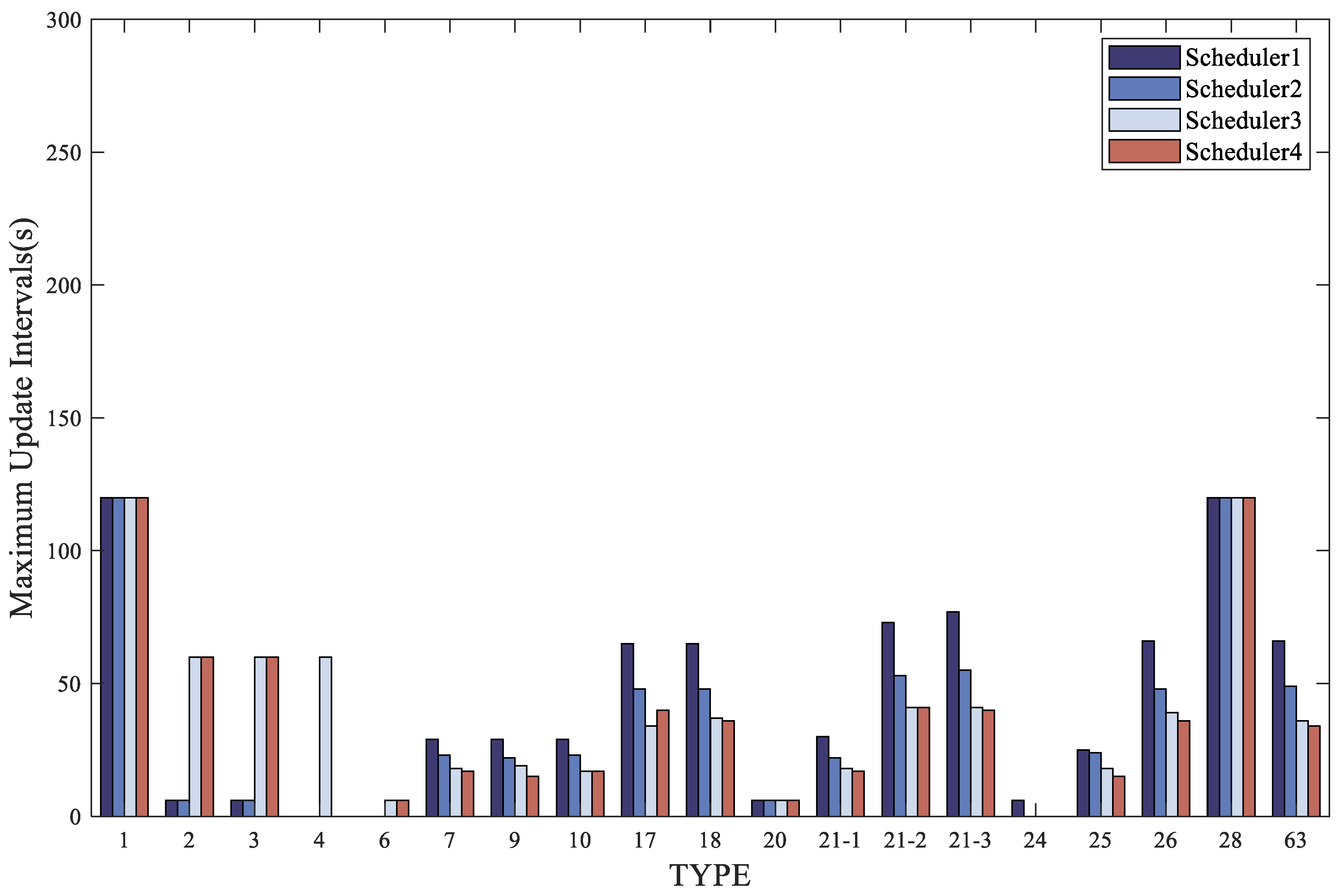
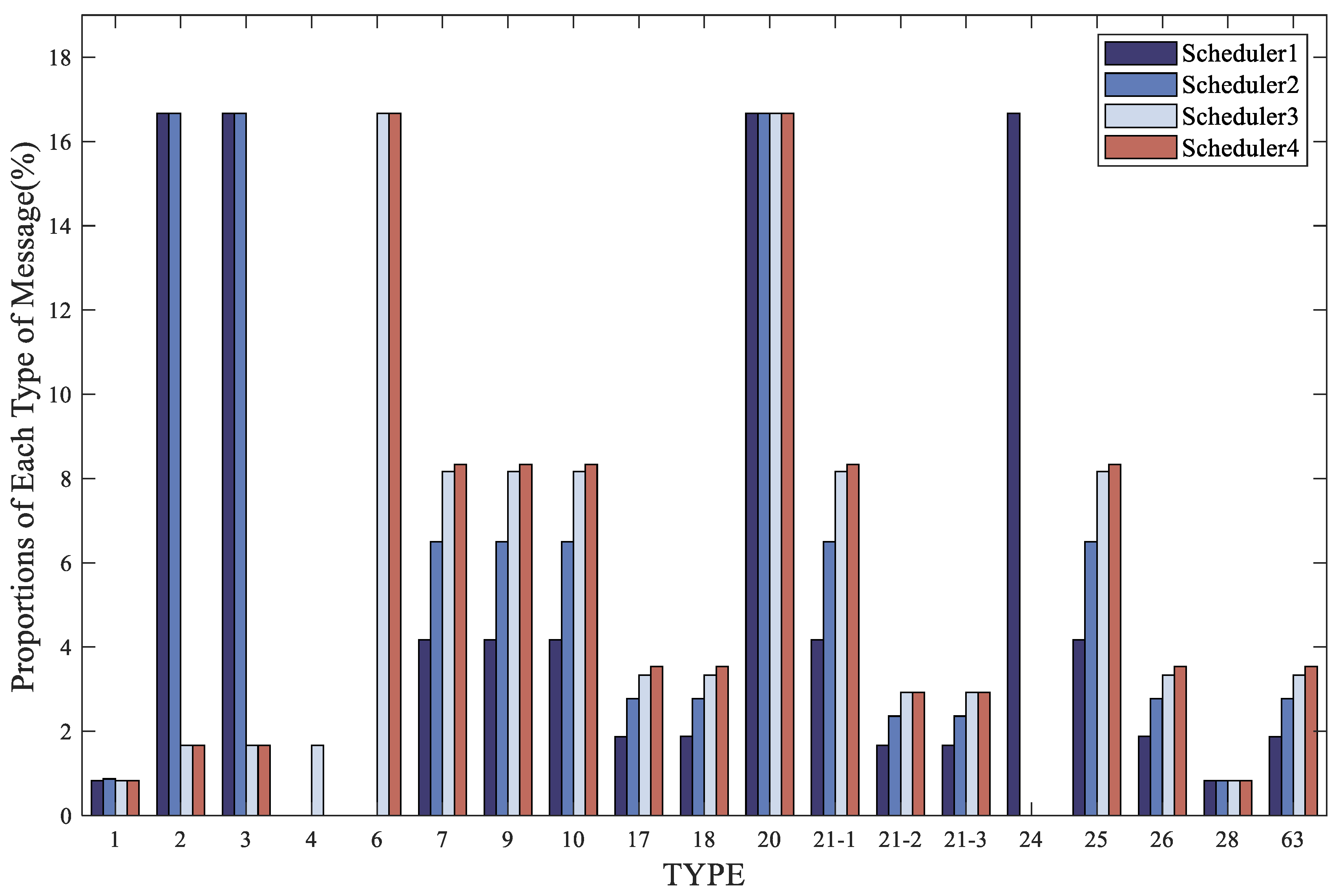
Furthermore, a comparison was made among the four optimization schemes to optimize the bandwidth after the addition of authentication messages. The simulation results for the proportion and maximum update interval of each type of message after adding authentication are shown in
Figure 12 and
Figure 13. It can be observed from the figures that none of the four schedulers exceeded the message broadcast timeout, thus satisfying the maximum update interval specified by the ICAO. The presence of dynamic messages in the schedulers provides available bandwidth for the addition of authentication messages, thus confirming the feasibility of the method proposed in this paper.
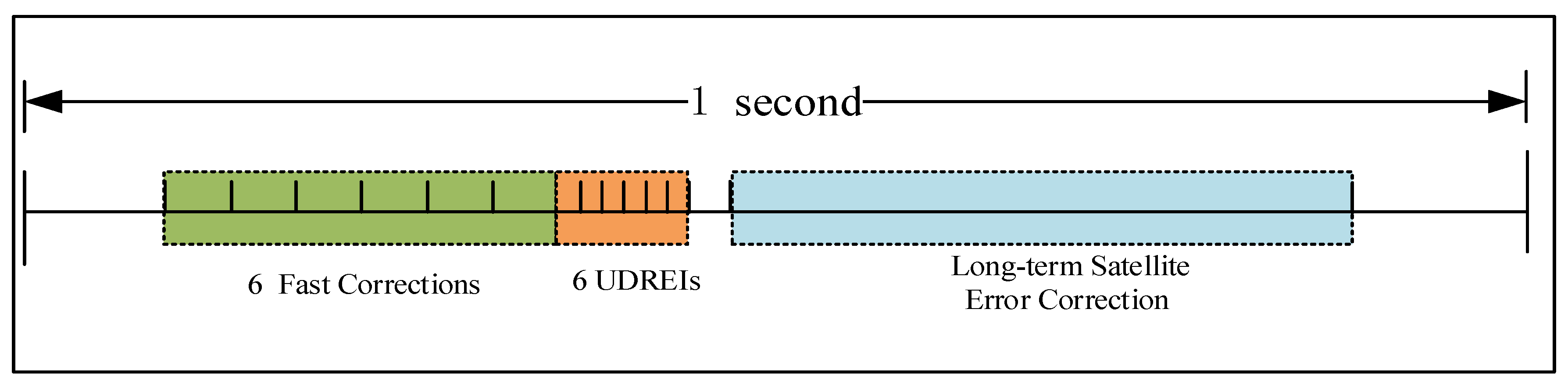
The fixed time sequence messages, as their cycles are predefined, are broadcast according to fixed intervals. In the first scheduler, MT24 is used to replace MT4 as a fixed time sequence message. This is because in practical broadcast messages, the fast correction information can be transmitted by MT2 and MT3 together, and MT24 contains mixed correction information, including fast correction information. Since both MT24 and MT4 have a fixed interval of 6 s, their proportions are the same, at 16.67%. In the second scheduler, dynamic MT1 is used. According to the requirements of dynamic MT1, it is set to appear once every 1–2 h, indicating that the status of observed satellites has changed and there is a change in the PRN mask. At this time, MT1 is broadcast repeatedly to ensure that users receive the latest PRN mask. Since MT1 has a fixed interval of 120 s, it is broadcast once every 120 s, with a repeat of MT1 occurring every 3600–7200 s. This repetition of MT1 has a relatively minor impact on other messages during a day of message broadcasting. According to the table, in the second scheduler, since there is no MT4 occupying 1/6 of the bandwidth, the proportion of dynamic messages is higher compared to the first scheduler, and the maximum update intervals of dynamic messages are shorter than that in the first scheme. In the third scheduler, the fast correction message interval is set to 60 s. For integrity requirements, MT6 is introduced for integrity monitoring, broadcast every 6 s, which is the same interval as the fast correction messages MT2–4 in the first two schedulers. MT6 has the same proportion as the fast correction messages MT2–4 in the first two schedulers, at 16.67%. However, for other messages, due to the increased interval of MT2–4, their proportions will inevitably decrease. The reduced proportion is then allocated to other messages. The proportions of other dynamic messages in this scheduler are higher compared to the first two schedulers, and the maximum update interval for these messages is shorter than in the first two schedulers. In the fourth scheduler, MT4 is canceled, and the frequency of MT2–5 is reduced at the same time. Similar to the third scheduler, the fast correction message interval is changed to 60 s. For integrity requirements, MT6 is introduced for integrity monitoring. This scheduler is an improvement over the third scheduler. Since MT4 is canceled, the proportions of various dynamic messages are increased compared to the third scheduler, and the maximum update interval for these messages is reduced compared to the third scheduler. As shown in
Table 8 and
Table 9, the third and fourth schedulers have shorter maximum update intervals for messages, which satisfies integrity requirements while also allowing for increased proportions of other messages and more information to be broadcast in these messages.
In terms of the initial broadcast times, as shown in
Table 10, the first broadcast time for MT20 is manually set in the simulation, occurring at around 3 or 4 s. For the remaining four types of messages, their priority is determined by the value of the denominator in their weight calculations, with values ranging from 21-1, 26, 21-2, to 21-3 (21-2 and 21-3 share the same denominator of 360). A smaller denominator results in a higher weight value ratio. Prioritization follows from high to low: 21-1, 26, 21-2, and 21-3. Consequently, the first appearance times are as follows, from earliest to latest: 21-1, 26, 21-2, and 21-3. In the second scheduler, the repeated broadcast of MT1 has minimal impact on the message broadcast, as the repetition of MT1 occurs only once every 3600–7200 s, which does not significantly affect the initial broadcast times. However, with the elimination of MT4, which occupied 1/6 of the bandwidth, the remaining dynamic messages are broadcast earlier than in the first scheduler. In the third scheduler, due to the increased interval of MT2–4, they do not need to be broadcast every 6 s, and other messages are broadcast ahead of schedule compared to the first two schedulers. The initial positioning time for MT26 is reduced by nearly half compared to the first scheduler, the interval of the fast authentication message MT20 is fixed at 6 s, and the initial authentication time for the slow authentication message MT21, is also reduced by almost half. In the fourth scheduler, MT4 is canceled on the basis of the third scheduler, and the bandwidth saved from MT4 is allocated to other messages. Consequently, the initial broadcast times for various message types are generally improved compared to the third scheduler.
Taking the above into account, based on the effective bandwidth utilization and the shortest TTFF, the fourth scheduler is the most optimal.
Several message schedulers proposed in this paper comply with the ICAO regulations regarding the maximum update intervals for SBAS messages.
Table 11 and
Table 12 provide a comparison of the four optimization schedulers and the scheduler designed by Yun Y in Korea for broadcasting WAAS.
Compared to the SBAS fixed time sequence message scheduler, all schedulers show improvements in message update intervals, with the optimal fourth scheduler having a user’s TTFF of only 26 s, compared to the specified maximum update interval of 300 s. This indicates an enhancement in system integrity. Additionally, compared to a fully dynamic message scheduler, the fixed time sequence dynamic message schedulers proposed in this paper can significantly reduce the probability of simultaneous timeout of multiple messages due to the setting of several messages that do not need to participate in the dynamic selection of message broadcasts. Once there is a prolonged system failure or system downtime in the SBAS, this proposed scheduler also leads to faster recovery times compared to a fully dynamic message scheduler [
8]. When a message alarm occurs, the SBAS will broadcast an alarm message to the user, causing delays in the transmission of all message types. Setting MT63 null message at a fixed interval of every 12 s, this ratio is lower compared to WAAS, since the fact that authentication has already been added to the message and the remaining redundancy is sufficient to support the addition of new features.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












