
GNSS Radio Frequency Interference Monitoring from LEO Satellites: An In-Laboratory Prototype

 ,
, 
 ,
,  ,
,
Abstract
:1. Introduction
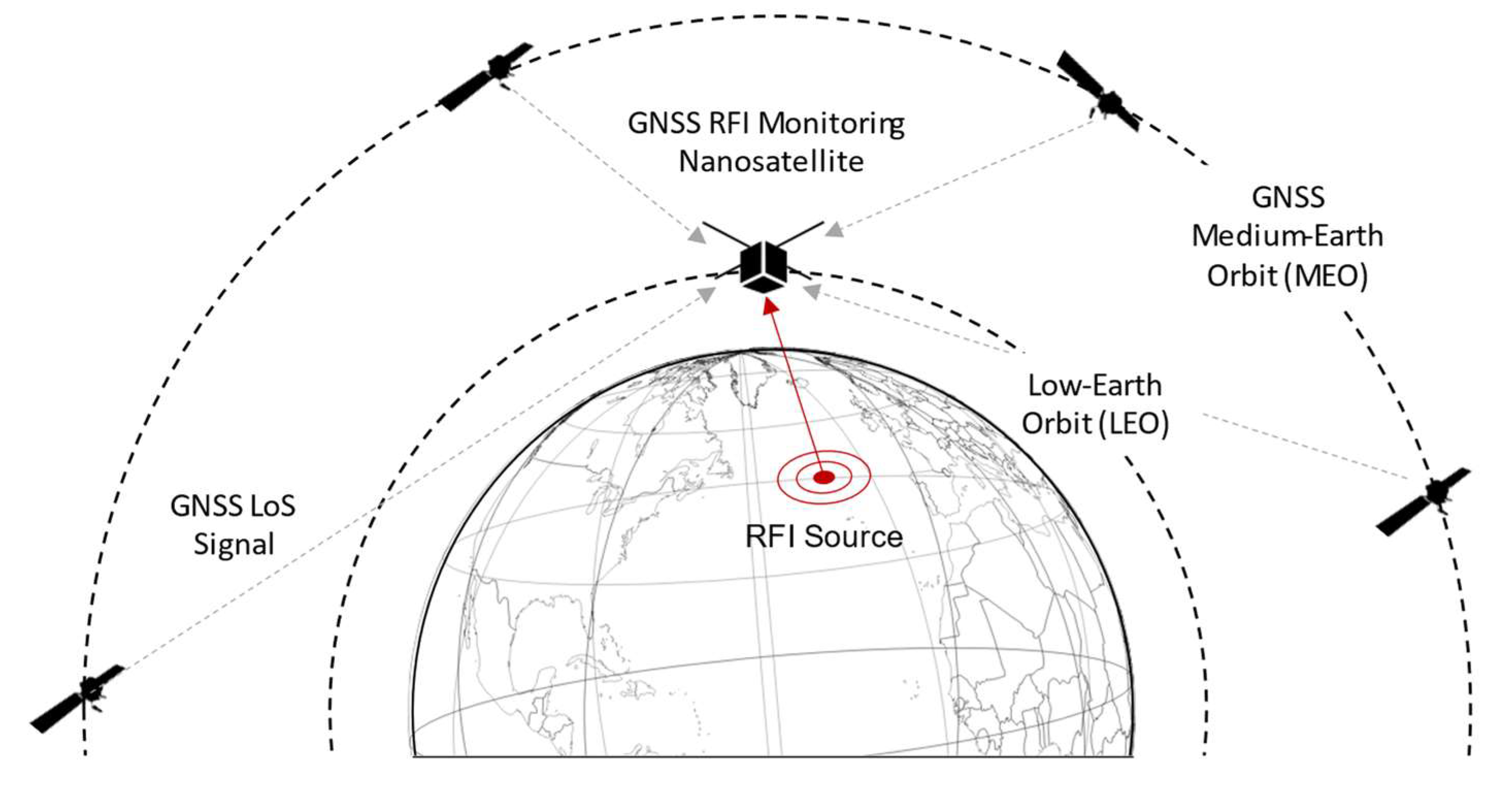
2. Overview of the GNSS RFI Monitoring System
3. Theoretical Background
- By detection, we refer to the capability of the satellite on-board system to detect RFI sources on Earth. RFI detection constitutes the trigger for the subsequent classification and localization.
- Once an RFI is detected, feature extraction allows for discriminating its nature. Classification refers indeed to those algorithms that are able to discriminate the received interference according to pre-defined classes based on specific signal features. In this regard, researchers have recently applied artificial intelligence (AI)/machine learning (ML) algorithms to classify interference: we can find examples of this in [46,47,48,49,50,51]. Convolutional neural network (CNN) architecture, commonly used for image classification, can be applied to this problem. As an example, in [46] the authors show the improvement of the levels of accuracy reachable with a feature-aided CNN with respect to a baseline CNN.
- Localization covers aspects related to the techniques conceived to pinpoint the position of interference sources on Earth. RFI source localization has been extensively studied in the field of radar and remote sensing technologies, and consolidated techniques can be used in the presence of both single and multiple satellites observing RFI emission [52]. Well-known techniques for emitter localization are based on time-of-arrival (ToA) and frequency-of-arrival (FoA) that foresee the estimation of the signal propagation time and the carrier frequency. However, unknown signals transmitted over unknown carrier frequencies are typically localized through their differential counterparts, i.e., time-difference-of-arrival (TDoA) and frequency-difference-of-arrival (FDoA). When multiple antennas are available at the observer, angle-of-arrival (AoA) and differential AoA (DAoA) can be considered. Based on directional measurements regarding specific spatial regions, received signal strength (RSS) can be considered to determine RFI emitters.
3.1. RFI Detection in GNSS Receivers
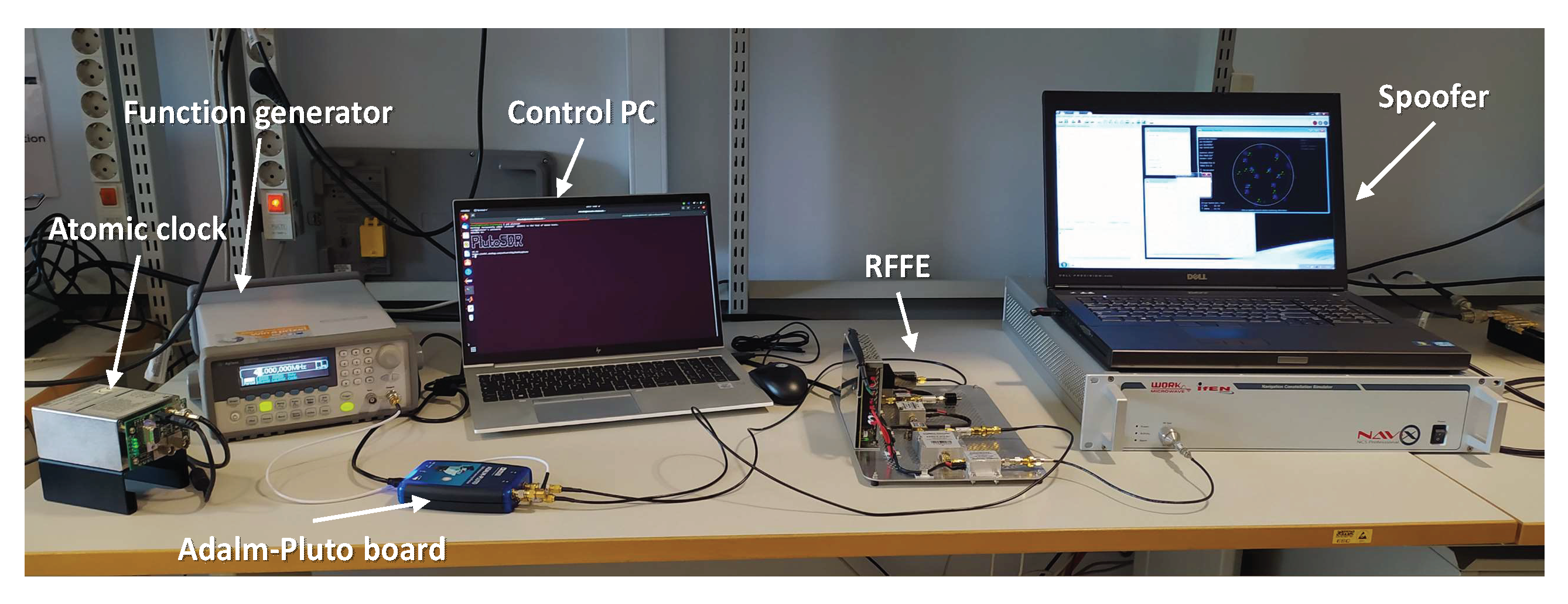
4. Development Work
4.1. Selection of the Target Platform
4.2. Implementation of the RFI Detectors
4.2.1. Chi-Square Goodness of Fit (GoF) Test
- Save a snapshot of the incoming samples;
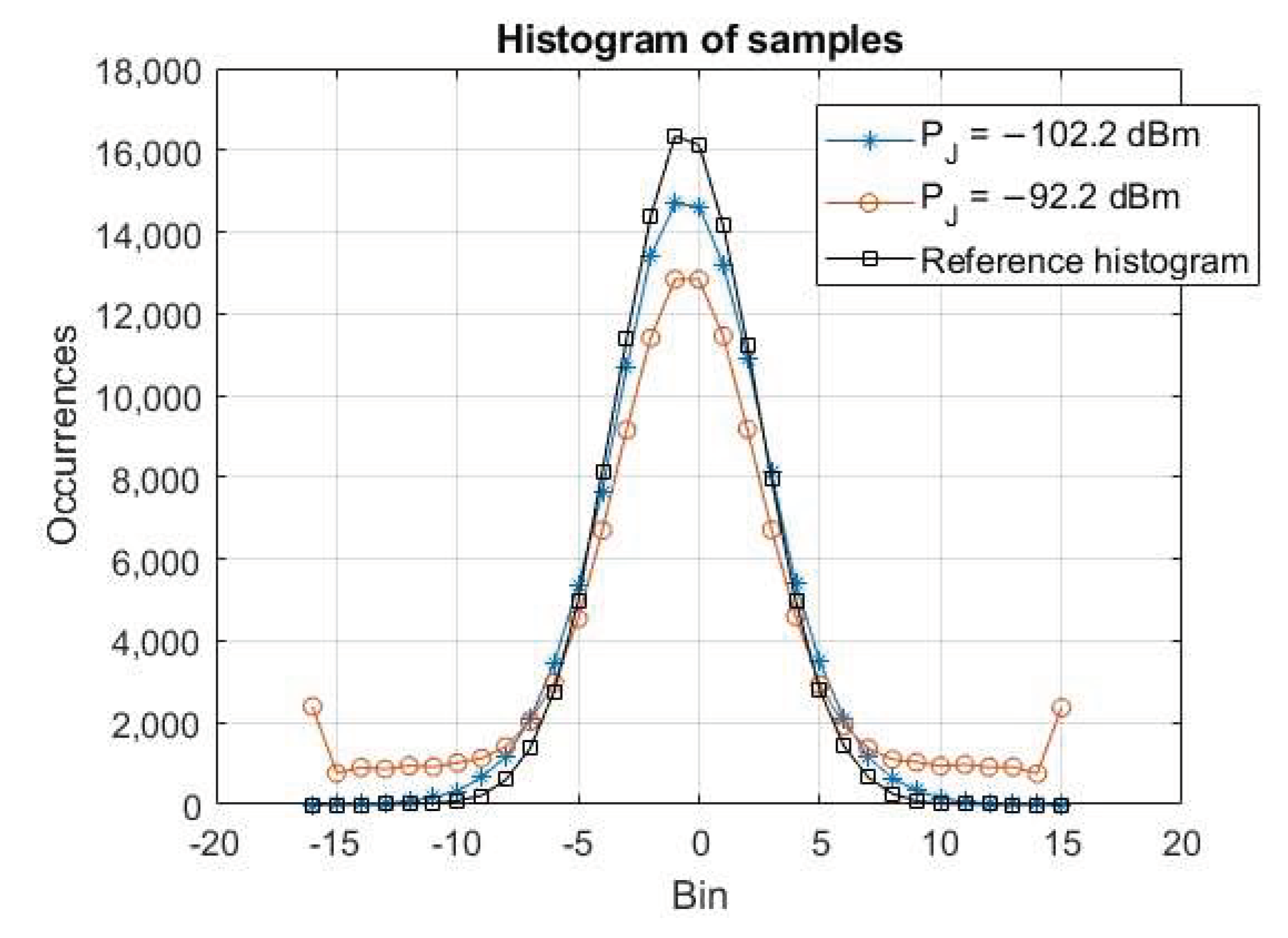
- Compute the histogram of the samples in the snapshot, namely the occurrences of the samples’ values;
- Compare the current histogram with a reference one, evaluating the p-value;
- Declare the presence of the interference in case the p-value is below the threshold, the so-called significance level.
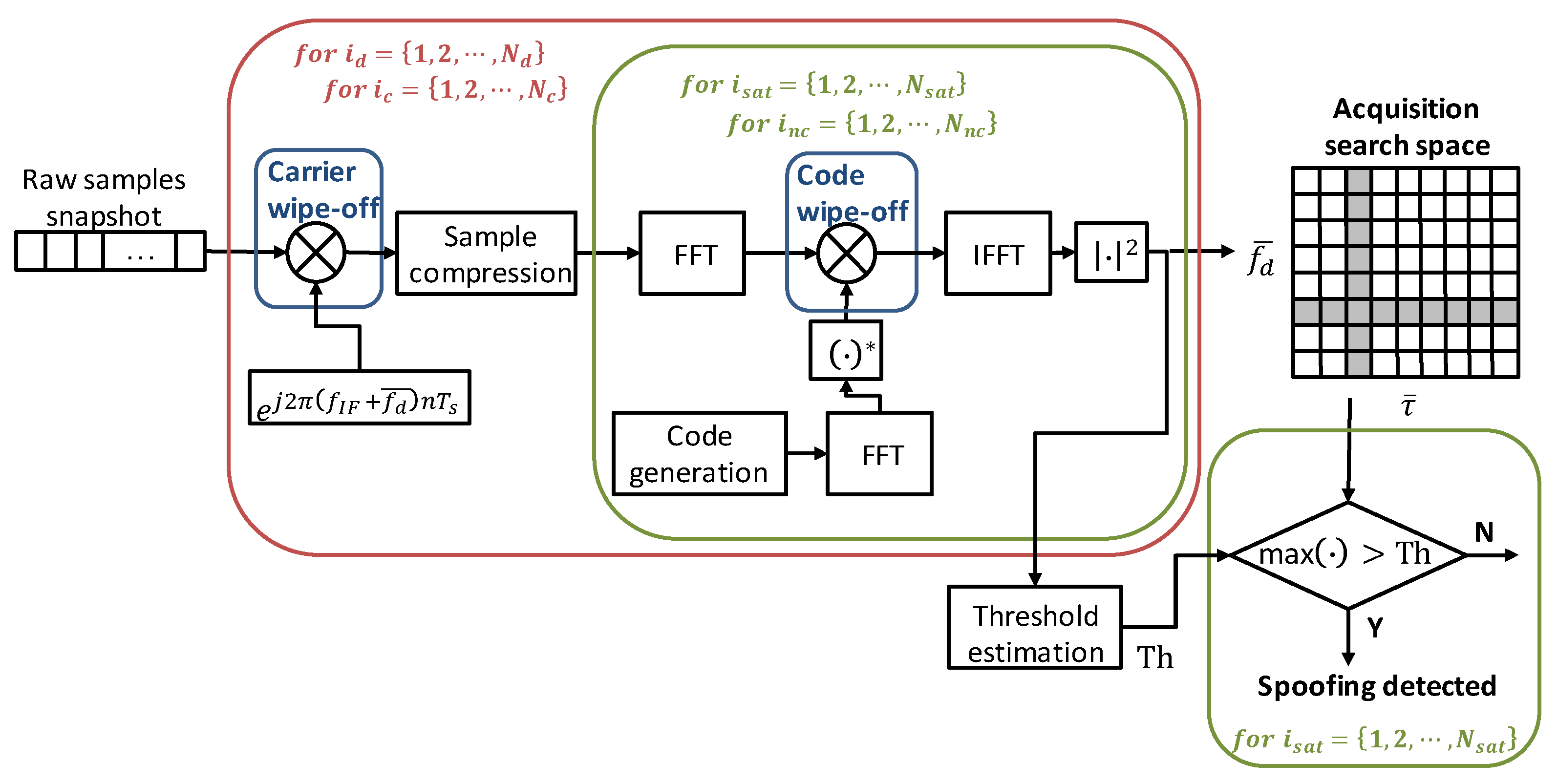
4.2.2. The Snapshot Acquisition
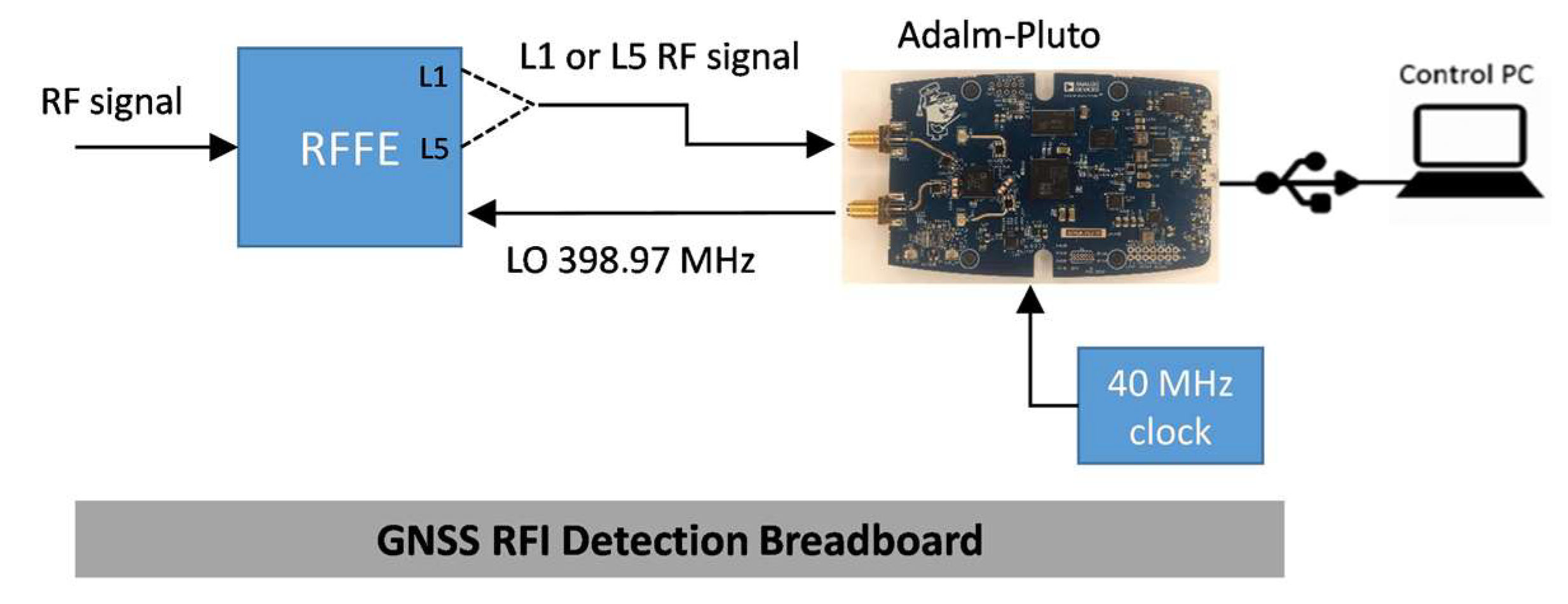
4.2.3. The RFI Detection Software Module: A General Overview
- The detection of non-GNSS-like signals and GNSS-like RFIs by means of the GoF and the FFT-based PCS snapshot acquisition, respectively;
- The elaboration on the fly of snapshots of raw samples out of the ADC;
- The generation of a sinusoidal tone used to up-convert the L5/E5 signal at to the L1/E1 band at , as better described in the next section;
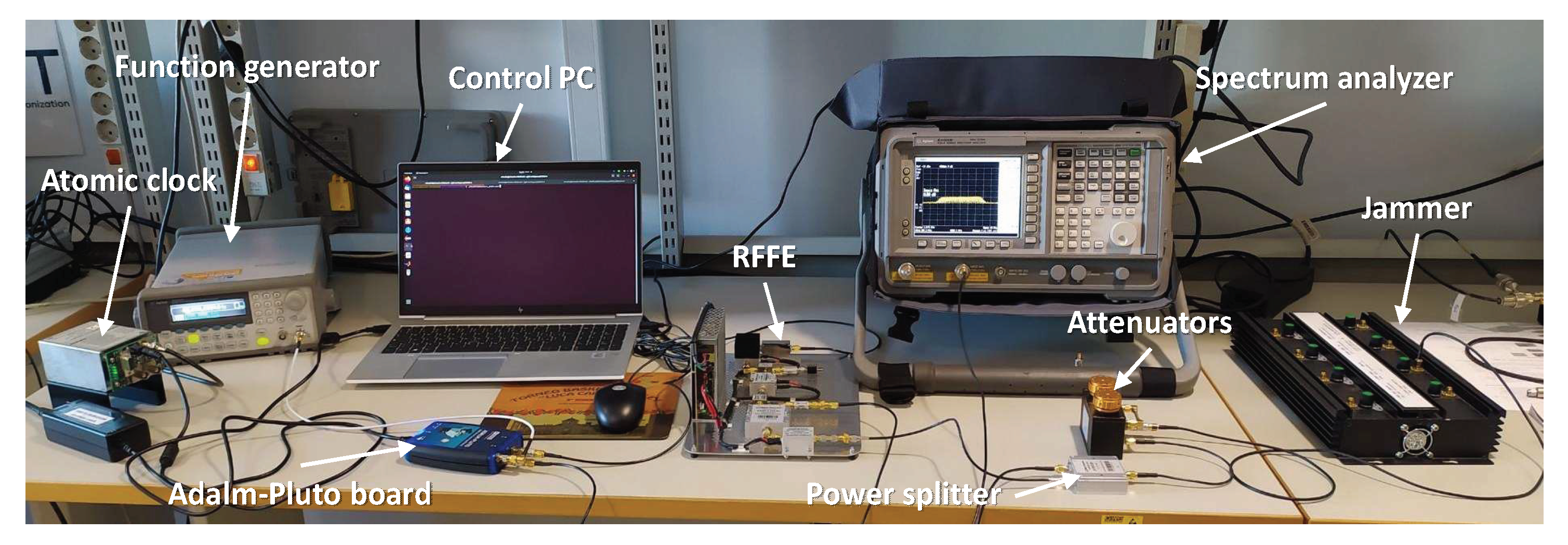
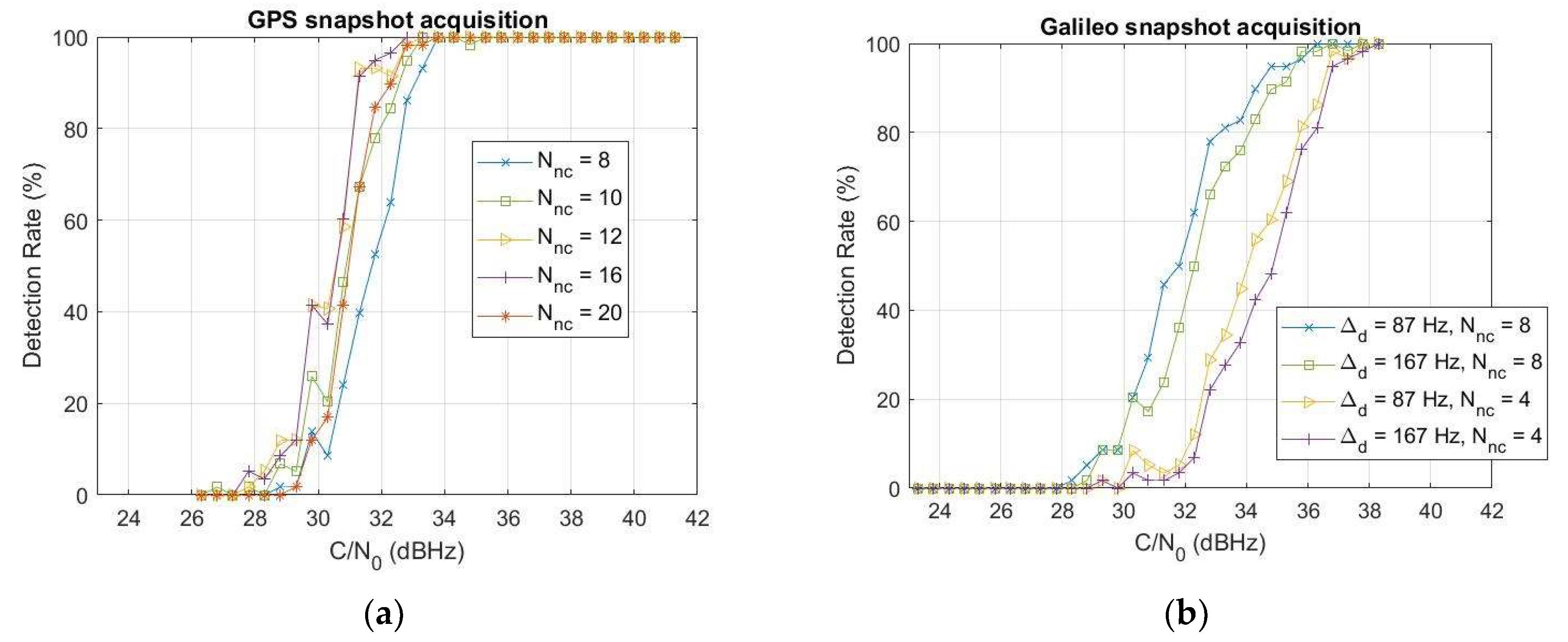
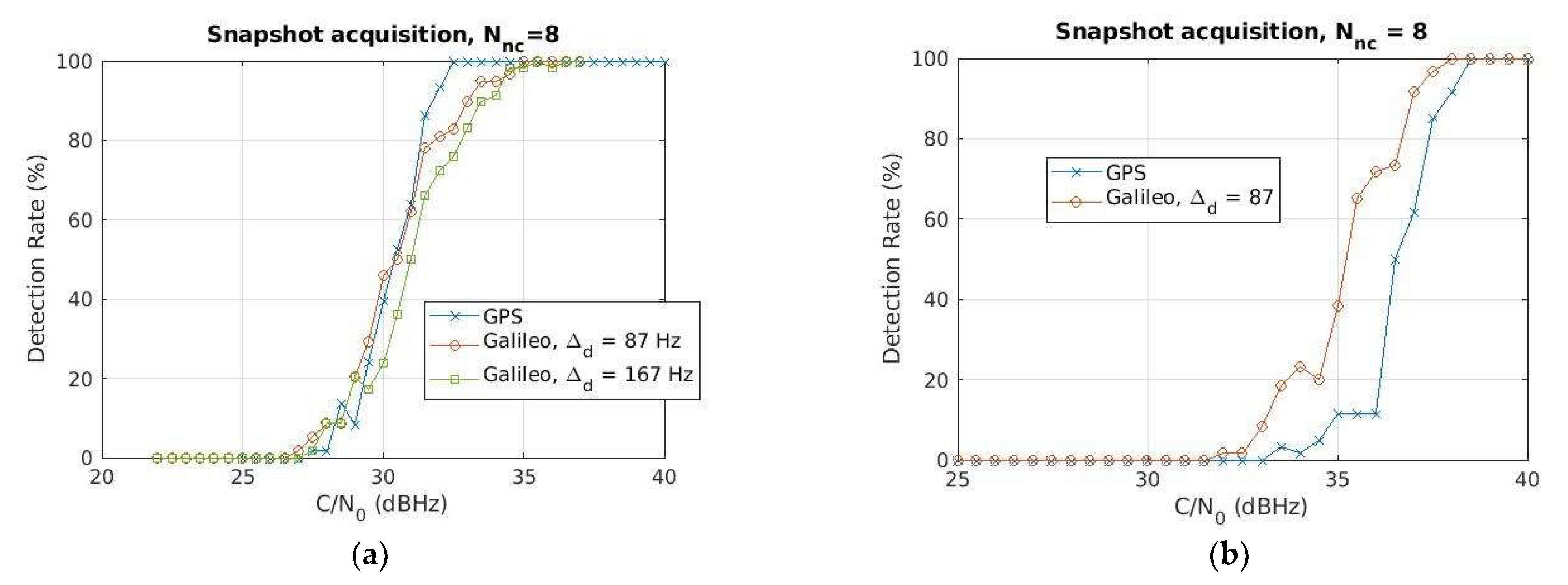
5. Detection Performance Evaluation
- The sensitivity is defined as the minimum level of detected interfering power;
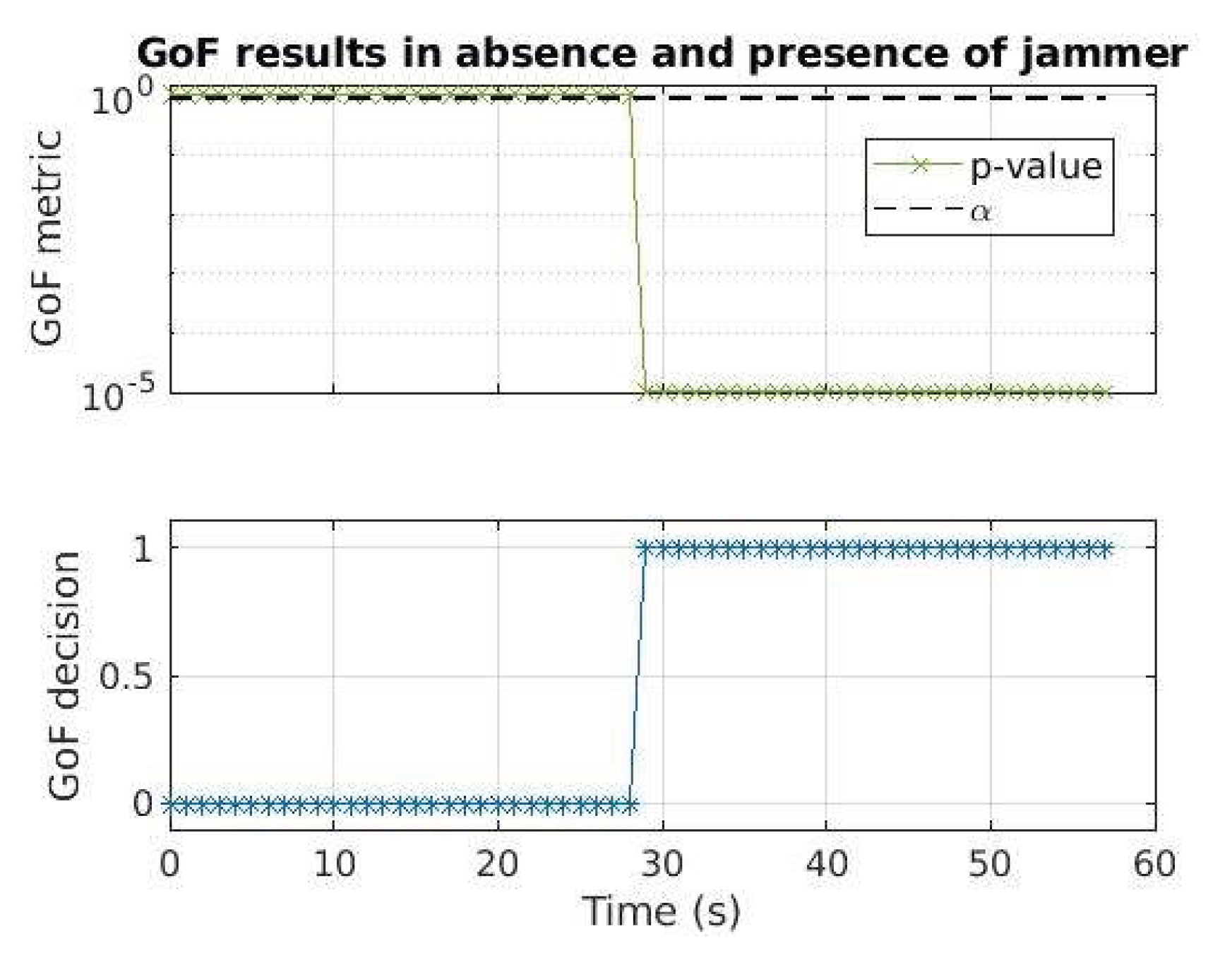
- The detection capability, i.e., the capacity to properly activate/deactivate when the interference is present/absent (OFF-ON test).
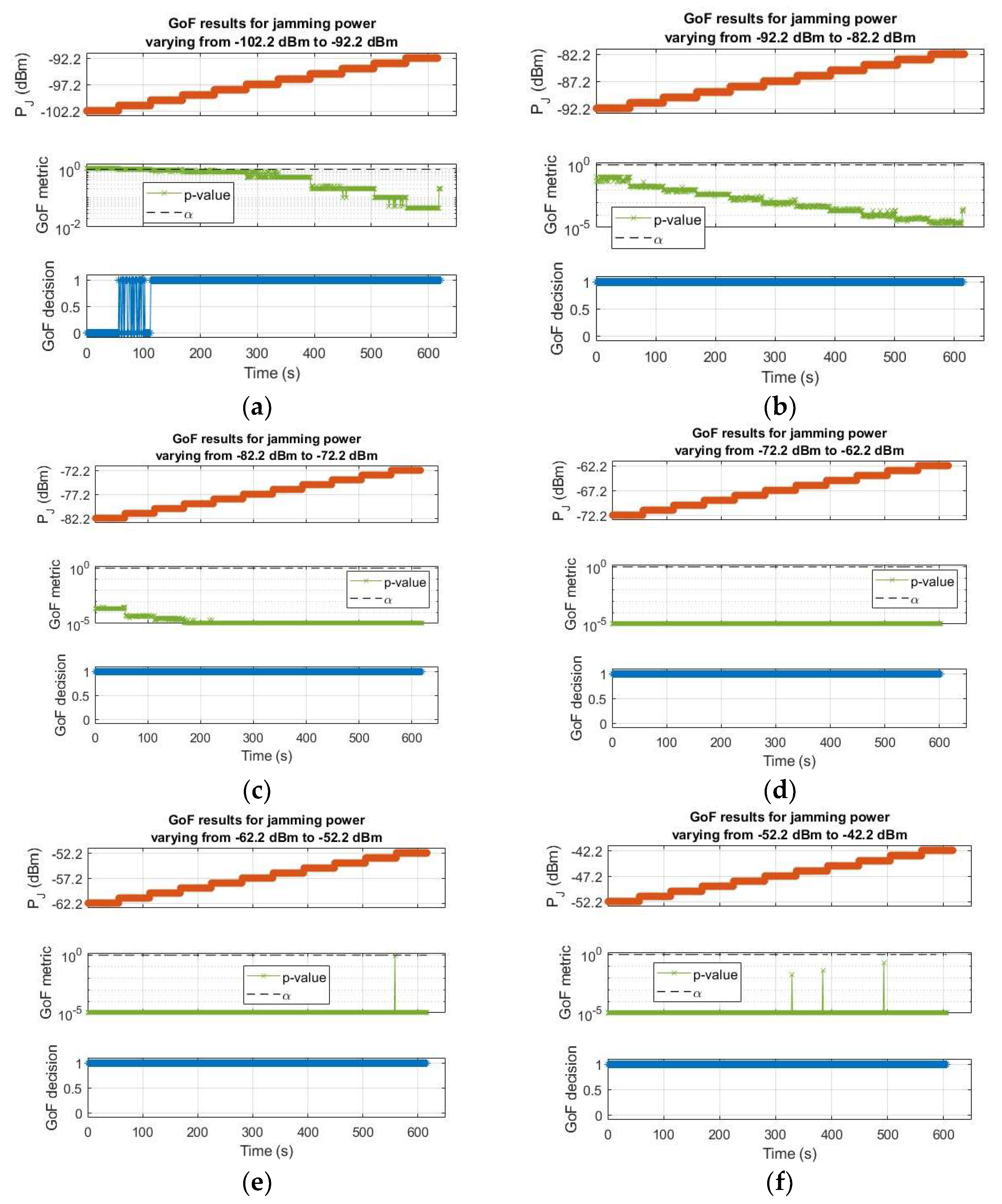
5.1. Jamming Detection Evaluation
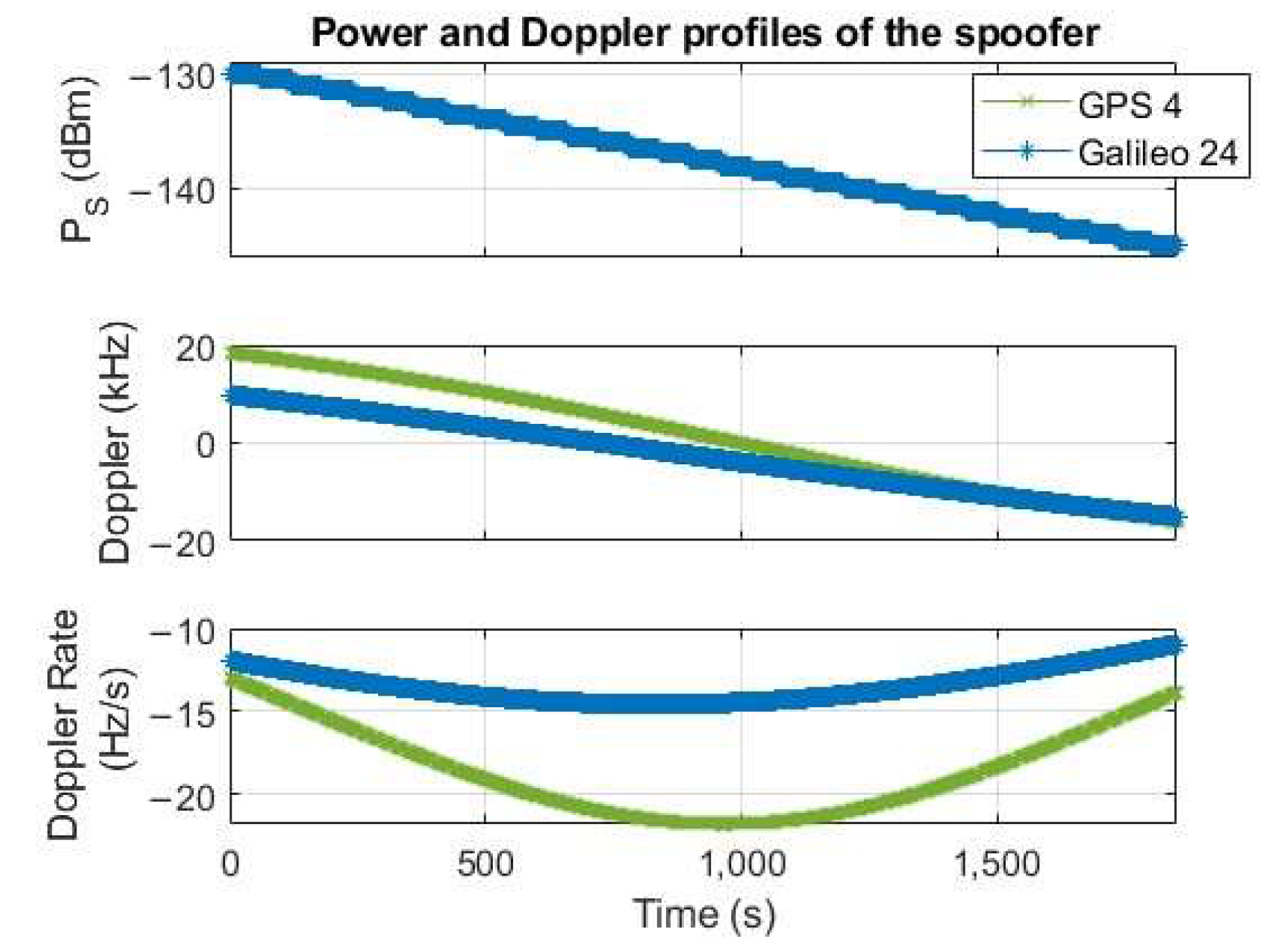
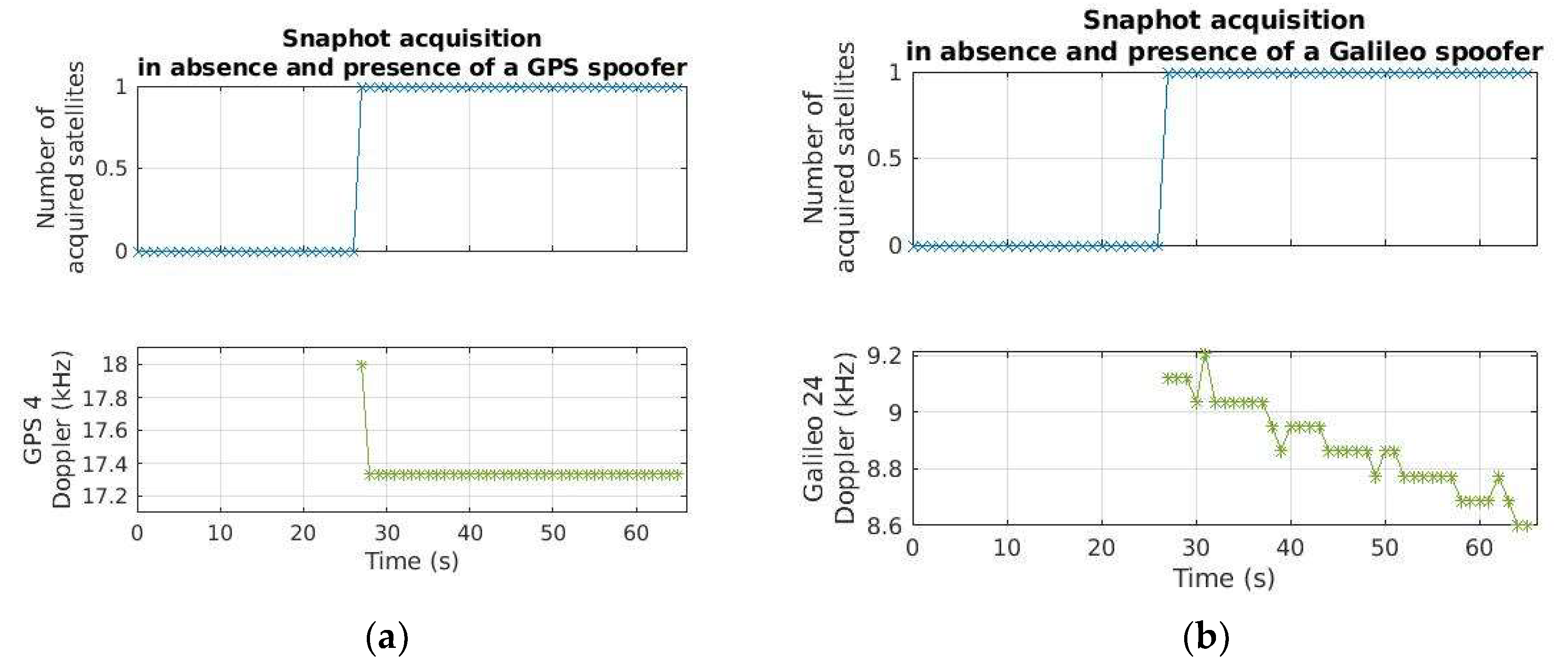
5.2. Spoofing Detection Evaluation
6. Computational Load Analysis
7. Discussion
8. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dovis, F. GNSS Interference Threats and Countermeasures; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- Humphreys, T.E. Interference. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 469–503. [Google Scholar]
- Chen, L.; Thombre, S.; Jarvinen, K.; Lohan, E.S.; Alen-Savikko, A.; Leppakoski, H.; Bhuiyan, M.Z.H.; Bu-Pasha, S.; Ferrara, G.N.; Honkala, S.; et al. Robustness, Security and Privacy in Location-Based Services for Future IoT: A Survey. IEEE Access 2017, 5, 8956–8977. [Google Scholar] [CrossRef]
- Ioannides, R.T.; Pany, T.; Gibbons, G. Known Vulnerabilities of Global Navigation Satellite Systems, Status, and Potential Mitigation Techniques. Proc. IEEE 2016, 104, 1174–1194. [Google Scholar] [CrossRef]
- Falletti, E.; Margaria, D.; Marucco, G.; Motella, B.; Nicola, M.; Pini, M. Synchronization of Critical Infrastructures Dependent Upon GNSS: Current Vulnerabilities and Protection Provided by New Signals. IEEE Syst. J. 2019, 13, 2118–2129. [Google Scholar] [CrossRef]
- EUROCONTROL, Eurocontrol Voluntary ATM Incident Reporting (EVAIR) Safety Bulletin no.24 Years 2016–2020. Available online: https://www.eurocontrol.int/publication/eurocontrol-voluntary-atm-incident-reporting-evair-safety-bulletin-24 (accessed on 30 November 2023).
- Buesnel, G. Thousands of GNSS Jamming and Spoofing Incidents Reported in 2020. Available online: https://www.linkedin.com/pulse/thousands-gnss-jamming-spoofing-incidents-reported-2020-guy-buesnel/ (accessed on 16 May 2023).
- Figuet, B.; Waltert, M.; Felux, M.; Olive, X. GNSS Jamming and Its Effect on Air Traffic in Eastern Europe. Eng. Proc. 2022, 28, 12. [Google Scholar] [CrossRef]
- Bryan, V. EASA Warns of Intensifying GPS Jamming Incidents Linked to War in Ukraine. Aerotime Hub. 17 March 2022. Available online: https://www.aerotime.aero/articles/30513-easa-warns-over-gps-jamming-ukraine-war (accessed on 30 November 2023).
- GPSPATRON GNSS Interference in Wildlife. 7 April 2022. Available online: https://gpspatron.com/gnss-interference-from-wildlife/ (accessed on 30 November 2023).
- ICAO Global Aviation Data Management GNSS/GPS Interference Reported in MENA Region Jan-Dec 2021. Presentation at the SEIG-4 Meeting Cairo. 23–25 October 2022. Available online: https://www.icao.int/MID/Documents/2022/SEIG4%20and%20NASP/PPT5.pdf (accessed on 30 November 2023).
- Goward, D. Increasing GNSS Interference: UK and EU Warn Aviation. GPS World. 11 April 2023. Available online: https://www.gpsworld.com/increasing-gnss-interference-uk-and-eu-warn-aviation/ (accessed on 30 November 2023).
- Morales-Ferre, R.; Richter, P.; Falletti, E.; de la Fuente, A.; Lohan, E.S. A Survey on Coping With Intentional Interference in Satellite Navigation for Manned and Unmanned Aircraft. IEEE Commun. Surv. Tutorials 2020, 22, 249–291. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Y.; Yang, Y.; Liang, C.; Liu, R. Spoofing and Anti-Spoofing Technologies of Global Navigation Satellite System: A Survey. IEEE Access 2020, 8, 165444–165496. [Google Scholar] [CrossRef]
- Meng, L.; Yang, L.; Yang, W.; Zhang, L. A Survey of GNSS Spoofing and Anti-Spoofing Technology. Remote. Sens. 2022, 14, 4826. [Google Scholar] [CrossRef]
- Minetto, A.; Polidori, B.D.; Pini, M.; Dovis, F. Investigation on the Actual Robustness of GNSS-based Timing Distribution Under Meaconing and Spoofing Interferences. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 3848–3862. [Google Scholar] [CrossRef]
- Junzhi, L.; Wanqing, L.; Qixiang, F.; Beidian, L. Research Progress of GNSS Spoofing and Spoofing Detection Technology. In Proceedings of the 2019 IEEE 19th International Conference on Communication Technology (ICCT), Xi’an, China, 16–19 October 2019; pp. 1360–1369. [Google Scholar] [CrossRef]
- Borio, D.; Dovis, F.; Kuusniemi, H.; Lo Presti, L. Impact and Detection of GNSS Jammers on Consumer Grade Satellite Navigation Receivers. Proc. IEEE 2016, 104, 1233–1245. [Google Scholar] [CrossRef]
- Curran, J.T.; Bavaro, M.; Closas, P.; Navarro, M. A look at the threat of systematic jamming of GNSS. Inside GNSS 2017, 12, 46–53. [Google Scholar]
- Issam, S.; Adnane, A.; Madiabdessalam, A. Anti-Jamming techniques for aviation GNSS-based navigation systems: Survey. In Proceedings of the 2020 IEEE 2nd International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 2–3 December 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Medina, D.; Lass, C.; Marcos, E.P.; Ziebold, R.; Closas, P.; Garcia, J. On GNSS Jamming Threat from the Maritime Navigation Perspective. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Su, M.; Su, X.; Zhao, Q.; Liu, J. BeiDou Augmented Navigation from Low Earth Orbit Satellites. Sensors 2019, 19, 198. [Google Scholar] [CrossRef]
- Joerger, M.; Gratton, L.; Pervan, B.; Cohen, C.E. Analysis of Iridium-Augmented GPS for Floating Carrier Phase Positioning. Navigation 2010, 57, 137–160. [Google Scholar] [CrossRef]
- Wickert, J.; Cardellach, E.; Martin-Neira, M.; Bandeiras, J.; Bertino, L.; Andersen, O.B.; Camps, A.; Catarino, N.; Chapron, B.; Fabra, F.; et al. GEROS-ISS: GNSS REflectometry, Radio Occultation, and Scatterometry Onboard the International Space Station. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2016, 9, 4552–4581. [Google Scholar] [CrossRef]
- Ding, T.; Awange, J.L.; Scherllin-Pirscher, B.; Kuhn, M.; Khandu Anyah, R.; Zerihun, A.; Bui, L.K. GNSS radio occultation infilling of the African radiosonde data gaps reveals drivers of tropopause climate variability. J. Geophys. Res. Atmos. 2022, 127, e2022JD036648. [Google Scholar] [CrossRef]
- Yu, K.; Han, S.; Bu, J.; An, Y.; Zhou, Z.; Wang, C.; Tabibi, S.; Cheong, J.W. Spaceborne GNSS Reflectometry. Remote. Sens. 2022, 14, 1605. [Google Scholar] [CrossRef]
- Kang, Z.; Tapley, B.; Bettadpur, S.; Ries, J.; Nagel, P.; Pastor, R. Precise orbit determination for the GRACE mission using only GPS data. J. Geodesy 2006, 80, 322–331. [Google Scholar] [CrossRef]
- Ruf, C.; Gross, S.; Misra, S. RFI detection and mitigation for microwave radiometry with an agile digital detector. IEEE Trans. Geosci. Remote. Sens. 2006, 44, 694–706. [Google Scholar] [CrossRef]
- Piepmeier, J.R.; Johnson, J.T.; Mohammed, P.N.; Bradley, D.; Ruf, C.; Aksoy, M.; Garcia, R.; Hudson, D.; Miles, L.; Wong, M. Radio-Frequency Interference Mitigation for the Soil Moisture Active Passive Microwave Radiometer. IEEE Trans. Geosci. Remote. Sens. 2013, 52, 761–775. [Google Scholar] [CrossRef]
- Mohammed, P.N.; Aksoy, M.; Piepmeier, J.R.; Johnson, J.T.; Bringer, A. SMAP L-Band Microwave Radiometer: RFI Mitigation Prelaunch Analysis and First Year On-Orbit Observations. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 6035–6047. [Google Scholar] [CrossRef]
- Ticconi, F.; Anderson, C.; Figa-Saldana, J.; Wilson, J.J.W.; Bauch, H. Analysis of Radio Frequency Interference in Metop ASCAT Backscatter Measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2017, 10, 2360–2371. [Google Scholar] [CrossRef]
- Isoz, O.; Buehler, S.A.; Kinch, K.; Bonnedal, M.; Akos, D.M. Interference from terrestrial sources and its impact on the GRAS GPS radio occultation receiver. Radio Sci. 2013, 49, 1–6. [Google Scholar] [CrossRef]
- Roberts, T.M.; Meehan, T.K.; Tien, J.Y.; Young, L.E. Detection and Localization of Terrestrial L-Band RFI With GNSS Receivers. IEEE Trans. Geosci. Remote. Sens. 2021, 60, 5801311. [Google Scholar] [CrossRef]
- Hitchens, T. NRO Contracts For Commercial Radio & Radar Sensing. Breaking Defence, 11 December 2019. Available online: https://breakingdefense.com/2019/12/nro-contracts-for-commercial-radio-radar-sensing/ (accessed on 22 May 2023).
- CaJacob, D.; McCarthy, N.; O’Shea, T.; McGwier, R. Geolocation of RF emitters with a formation-flying cluster of three mi-crosatellites. In Proceedings of the 30th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA., 6–11 August 2016. [Google Scholar]
- Hitchens, T. Spy Satellite Agency NRO Awards RF Geolocation Study Contracts to 6 Companies. Breaking Defence. 28 September 2022. Available online: https://breakingdefense.com/2022/09/spy-satellite-agency-nro-awards-rf-geolocation-study-contracts-to-6-companies/ (accessed on 22 May 2023).
- LaChapelle, D.M.; Narula, L.; Humphreys, T.E. Orbital War Driving: Assessing Transient GPS Interference from LEO. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021; pp. 3556–3568. [Google Scholar] [CrossRef]
- Murrian, M.J.; Narula, L.; Iannucci, P.A.; Budzien, S.; O’Hanlon, B.W.; Psiaki, M.L.; Humphreys, T.E. First results from three years of GNSS interference monitoring from low Earth orbit. Navigation 2021, 68, 673–685. [Google Scholar] [CrossRef]
- Clements, Z.; Ellis, P.; Psiaki, M.; Humphreys, T.E. Geolocation of Terrestrial GNSS Spoofing Signals from Low Earth Orbit. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 3418–3431. [Google Scholar] [CrossRef]
- Clements, Z.; Humphreys, T.E.; Ellis, P. Dual-Satellite Geolocation of Terrestrial GNSS Jammers from Low Earth Orbit. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; pp. 458–469. [Google Scholar] [CrossRef]
- Kassabian, N. Design of Pilot Channel Tracking Loop Systems for High Sensitivity Galileo Receivers. Ph.D. Thesis, Department of Electronics and Telecommunications, Torino, Italy, 2014. [Google Scholar]
- Borio, D. Swept GNSS jamming mitigation through pulse blanking. In Proceedings of the 2016 European Navigation Conference (ENC), Helsinki, Finland, 30 May–2 June 2016; pp. 1–8. [Google Scholar]
- Troglia Gamba, M.; Falletti, E.; Rovelli, D.; Tuozzi, A. FPGA implementation issues of a two-pole adaptive notch filter for GPS/Galileo receivers. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 3549–3557. [Google Scholar]
- Cristodaro, C.; Dovis, F.; Linty, N.; Romero, R. Design of a Configurable Monitoring Station for Scintillations by Means of a GNSS Software Radio Receiver. IEEE Geosci. Remote. Sens. Lett. 2018, 15, 325–329. [Google Scholar] [CrossRef]
- Pica, E.; Minetto, A.; Cesaroni, C.; Dovis, F. Analysis and Characterization of an Unclassified RFI Affecting Ionospheric Amplitude Scintillation Index over the Mediterranean Area. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2023, 16, 8230–8248. [Google Scholar] [CrossRef]
- Mehr, I.E.; Dovis, F. Detection and Classification of GNSS Jammers Using Convolutional Neural Networks. In Proceedings of the 2022 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 7–9 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Mehr, I.E.; Minetto, A.; Dovis, F. A Navigation Signals Monitoring, Analysis and Recording Tool: Application to Real-Time Interference Detection and Classification. In Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2023), Denver, CO, USA, 11–15 September 2023; pp. 3878–3887. [Google Scholar] [CrossRef]
- Qin, W.; Dovis, F. Situational Awareness of Chirp Jamming Threats to GNSS Based on Supervised Machine Learning. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 1707–1720. [Google Scholar] [CrossRef]
- Ferre, R.M.; De La Fuente, A.; Lohan, E.S. Jammer Classification in GNSS Bands Via Machine Learning Algorithms. Sensors 2019, 19, 4841. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Huang, Z.; Lang, R.; Qin, H.; Zhou, K.; Cao, Y. A Real-Time Interference Monitoring Technique for GNSS Based on a Twin Support Vector Machine Method. Sensors 2016, 16, 329. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Lo, S.; Walter, T. GNSS Interference Detection Using Machine Learning Algorithms on ADS-B Data. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021; pp. 4305–4315. [Google Scholar] [CrossRef]
- O’Donoughue, N. Emitter Detection and Geolocation for Electronic Warfare; Artech House: Norwood, MA, USA, 2019; ISBN 9781630815646. [Google Scholar]
- Borowski, H.; Isoz, O.; Marsten Eklöf, F.; Lo, S.; Akos, D. Detecting False Signals with Automatic Gain Control. GPS World 2012, 23, 38–43. [Google Scholar]
- Bastide, F.; Akos, D.; Macabiau, C.; Roturier, B. Automatic gain control (AGC) as an interference assessment tool. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 2042–2053. [Google Scholar]
- Balaei, A.; Motella, B.; Dempster, A.G. GPS interference detected in Sydney, Australia. In Proceedings of the IGNSS Conference 2007, Sydney, Australia, 4–6 December 2007; pp. 74–76. [Google Scholar]
- Pini, M.; Motella, B.; Lo Presti, L. Comparison Between AGC Control and Statistical Based Methods for Low Power Interference Detection. In Proceedings of the 29th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 265–274. [Google Scholar] [CrossRef]
- Motella, B.; Pini, M.; Lo Presti, L. GNSS interference detector based on Chi-square Goodness-of-fit test. In Proceedings of the 2012 6th ESA Workshop on Satellite Navigation Technologies (Navitec 2012) & European Workshop on GNSS Signals and Signal Processing, Noordwijk, Netherlands, 5–7 December 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Motella, B.; Lo Presti, L. Methods of goodness of fit for GNSS interference detection. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1690–1700. [Google Scholar] [CrossRef]
- Musumeci, L.; Dovis, F. A comparison of transformed-domain techniques for pulsed interference removal on GNSS signals. In Proceedings of the 2012 International Conference on Localization and GNSS (ICL-GNSS), Starnberg, Germany, 25–27 June 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Analog Devices—ADRV9361-Z7035 Evaluation Board. Available online: https://www.analog.com/en/design-center/evaluation-hardware-and-software/evaluation-boards-kits/adrv9361-z7035.html (accessed on 30 November 2023).
- Analog Devices—ADRV1CRR-FMC Evaluation Board. Available online: https://www.analog.com/en/design-center/evaluation-hardware-and-software/evaluation-boards-kits/adrv1crr-fmc.html (accessed on 30 November 2023).
- Analog Devices—Libiio Documentation. Available online: https://wiki.analog.com/resources/tools-software/linux-software/libiio (accessed on 30 November 2023).
- GOMspace—Space Qualified Software Defined Radio Platform. Available online: https://gomspace.com/shop/subsystems/payloads/software-defined-radio.aspx (accessed on 30 November 2023).
- Analog Devices—Adalm-Pluto RF FE Documentation. Available online: https://www.analog.com/en/design-center/evaluation-hardware-and-software/evaluation-boards-kits/adalm-pluto.html (accessed on 30 November 2023).
- Analog Devices—ADALM-PLUTO Overview. Available online: https://wiki.analog.com/university/tools/pluto (accessed on 30 November 2023).
- Borre, K.; Akos, D.; Bertelsen, N.; Rinder, P.; Jensen, S. A Software-Defined GPS and Galileo Receiver: A Single-Frequency Approach; Birkhäuser: Boston, MA, USA, 2007. [Google Scholar]
- Fantino, M.; Pini, M.; Mulassano, P.; Girau, G.; Nicola, M.; Nordio, A. Signal Compression for an Efficient and Simplified GNSS Signal Parallel Acquisition. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 159–166. [Google Scholar]
- Fantino, M.; Molino, A.; Nicola, M. N-Gene: A complete GPS and Galileo software suite for precise navigation. In Proceedings of the Institute of Navigation—International Technical Meeting 2010, ITM 2010, San Diego, CA, USA, 25–27 January 2010; Volume 2, pp. 1245–1251. [Google Scholar]
- Troglia Gamba, M.; Nicola, M.; Falletti, E. eNGene: An ARM Based Embedded Real-time Software GNSS Receiver. In Proceedings of the International Conference Institute of Navigation (ION) GNSS+ 2015, Institute of Navigation, Tampa, FL, USA, 14–18 September 2015; pp. 3178–3187. [Google Scholar]
- Leclère, J.; Landry, R.; Botteron, C. Comparison of L1 and L5 Bands GNSS Signals Acquisition. Sensors 2018, 18, 2779. [Google Scholar] [CrossRef]
- Tian, J.; Wang, Y.; Wang, W.; Shi, P.; Capuano, V.; Leclère, J.; Botteron, C.; Farine, P. Cross-band aided acquisition on HEO orbit. In Proceedings of the 65th International Astronautical Congress, Toronto, ON, Canada, 29 September–3 October 2014. [Google Scholar]
- Pattinson, M.; Lee, S.; Bhuiyan, Z.; Thombre, S.; Manikundalam, V.; Hill, S. Draft Standards for Receiver Testing against Threats. November 2017. Available online: https://aric-aachen.de/strike3/S3-work/downloads/STRIKE3_D42_Test_Standards_v2.0.pdf (accessed on 30 November 2023).
- IFEN- NavX NCS GNSS Simulator. Available online: https://www.ion.org/ptti/upload/files/1404_NavX-NCS-PRO_Datasheet_Letter.pdf (accessed on 4 May 2023).
- Falletti, E.; Margaria, D.; Nicola, M.; Povero, G.; Troglia Gamba, M.; Nicola, M. N-FUELS and SOPRANO: Educational tools for simulation, analysis and processing of satellite navigation signals. In Proceedings of the 2013 IEEE Frontiers in Education Conference (FIE), Oklahoma City, OK, USA, 23–26 October 2013; pp. 303–308. [Google Scholar] [CrossRef]
- Troglia Gamba, M.; Nicola, M.; Motella, B. Computational Load Analysis of a Galileo OSNMA-Ready Receiver for ARM-Based Embedded Platforms. Sensors 2021, 21, 467. [Google Scholar] [CrossRef]
- Xilinx Wiki page “Zynq-7000 AP SoC Spectrum Analyzer part 5—Accelerating Software—Accelerating an FFT with ACP Coprocessor Tech Tip”. Available online: https://xilinx-wiki.atlassian.net/wiki/spaces/A/pages/18841942/Zynq-7000+AP+SoC+Spectrum+Analyzer+part+5+-+Accelerating+Software+-+Accelerating+an+FFT+with+ACP+Coprocessor+Tech+Tip (accessed on 9 May 2023).
- Blunt, P.; Botteron, C.; Capuano, V.; Ghamari, S.; Rico, M.; Farine, P.A. Ultra-high sensitivity state-of-the-art receiver for space applications. In Proceedings of the Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 5–7 December 2018. [Google Scholar]
- Nardin, A.; Minetto, A.; Vouch, O.; Mariani, M.; Dovis, F. Snapshot acquisition of GNSS signals in space: A case study at lunar distances. In Proceedings of the 35th International Technical Meeting of TheSatellite Division of the Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 3603–3617. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GNSS Band | GPS L1/Galileo E1 |
| Receiver LO Frequency (GHz) | 1.57542 |
| Sampling mode | Baseband (IQ) |
| Sampling frequency fs (MSps) | 6.0 |
| Intermediate frequency fIF (MHz) | 0 |
| Double-side Bandwidth (MHz) | 4.0 |
| ADC Quantization (bits) | 12 |
| Clock mode | External |
| AGC mode | Manual |
| AGC gain | 63 dB |
| Value | ||
|---|---|---|
| Snapshot parameters | Snapshot duration (s) | 0.010 |
| Snapshot update time (s) | 1 | |
| GoF parameters | Number of histogram bins | 32 |
| Detection threshold (significance level) | 0.95 |
| GPS L1 Set of Values | Galileo E1 BSet of Values | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | ||
| Snapshot parameters | Snapshot duration (s) | 0.008 | 0.010 | 0.012 | 0.016 | 0.020 | 0.032 | 0.016 | ||
| Snapshot update time (s) | 1 | |||||||||
| Acquisition parameters | FFT size | 4096 | ||||||||
| False detection probability | 1.0 × 10−11 | |||||||||
| Maximum Doppler Frequency (Hz) | 20000 | |||||||||
| Doppler Frequency step (Hz) | 667 | 87 | 167 | 87 | 167 | |||||
| Code delay step (chip) | 0.25 | |||||||||
| Coherent sums (code periods) | 1 | |||||||||
| Non-coherent sums (code periods) | 8 | 10 | 12 | 16 | 20 | 8 | 4 | |||
| Platform | Platform 1 | Platform 2 [64,65] |
|---|---|---|
| Board | Dell Optiplex 9010 Desktop PC | Adalm-Pluto |
| Processor | Intel® CoreTM i7-3770 | ARM Cortex™-A9 |
| Base frequency of the processor | 3.40 GHz | 666 MHz |
| Cores | 8 | 1 |
| Memory | 8 GB DDR3 | 512 MB DDR3L |
| Storage | 1 TB HDD | 32 MB Serial Flash |
| Operative System | Ubuntu 18.04.3 LTS (64 bit) | Linux (32 bits) |
| Call Rate (Hz) | Average Execution Time (µs) | ||||
|---|---|---|---|---|---|
| Platform 1 | Platform 2 [64,65] | ||||
| Histogram function LUT (Calibration phase) | 0.1 | 474.00 | 805.00 | 7340.00 | 11,155.00 |
| Histogram function LUT (Evaluation phase) | 1 | 487.95 | 622.27 | 4227.47 | 14,288.45 |
| Call Rate | Average Execution Time (µs) | ||||
|---|---|---|---|---|---|
| Platform 1 | Platform 2 [64,65] | ||||
| GPS PerformCoarseAcquisition | 1 every snapshot | 571,499.17 | 636,101.09 | 26,791,668.06 | 28,459,665.13 |
| Galileo PerformCoarseAcquisition | 11,252,240.75 | 14,090,383.66 | 533,499,031.56 | 591,844,243.80 | |
| Call Rate | Average Execution Time (µs) | |||
|---|---|---|---|---|
| Platform 2 [64,65] | ||||
| GPS PerformCoarseAcquisition | 1 every snapshot | 26,791,668.06 | 13,487,729.39 | 6,948,932.56 |
| Galileo PerformCoarseAcquisition | 533,499,031.56 | 268,438,377.46 | 138,439,618.77 | |
| Call Rate (Times Every Snapshot) | Average Execution Time | |||
|---|---|---|---|---|
| (µs) | (%) | |||
| Calling function | Galileo PerformCoarseAcquisition | 1 | 11,055,285.24 | 100 |
| Main subroutines | GenerateCarrier | 73.46 | 0.92 | |
| GenerateSine | 19.47 | 0.24 | ||
| CarrierRealWipeOff | 45.34 | 0.57 | ||
| SampleCompression | 234.26 | 2.93 | ||
| PerformFft | 14.54 | 81.49 | ||
| ArrayProductComplex | 1.55 | 4.34 | ||
| ArrayAbs2 | 0.80 | 2.24 | ||
| RightShiftUnsignedInt | 0.58 | 1.62 | ||
| ArrayAddUnsignedInt | 0.79 | 2.21 | ||
| ArrayMax | 2.29 | 0.80 | ||
| UpdateCoarseThreshold | 1 | 53.79 | 0.00 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Troglia Gamba, M.; Polidori, B.D.; Minetto, A.; Dovis, F.; Banfi, E.; Dominici, F. GNSS Radio Frequency Interference Monitoring from LEO Satellites: An In-Laboratory Prototype. Sensors 2024, 24, 508. https://doi.org/10.3390/s24020508
Troglia Gamba M, Polidori BD, Minetto A, Dovis F, Banfi E, Dominici F. GNSS Radio Frequency Interference Monitoring from LEO Satellites: An In-Laboratory Prototype. Sensors. 2024; 24(2):508. https://doi.org/10.3390/s24020508
Chicago/Turabian StyleTroglia Gamba, Micaela, Brendan David Polidori, Alex Minetto, Fabio Dovis, Emilio Banfi, and Fabrizio Dominici. 2024. "GNSS Radio Frequency Interference Monitoring from LEO Satellites: An In-Laboratory Prototype" Sensors 24, no. 2: 508. https://doi.org/10.3390/s24020508
APA StyleTroglia Gamba, M., Polidori, B. D., Minetto, A., Dovis, F., Banfi, E., & Dominici, F. (2024). GNSS Radio Frequency Interference Monitoring from LEO Satellites: An In-Laboratory Prototype. Sensors, 24(2), 508. https://doi.org/10.3390/s24020508