
A Post-Processing Multipath/NLoS Bias Estimation Method Based on DBSCAN




Abstract
:1. Introduction
- Building upon the theoretical analysis of the pseudorange function, this research defines a leftover term containing the pseudorange biases caused by multipath/NLoS effects.
- This research derives two probability distributions for the defined leftover term, which motivates the utilization of a clustering algorithm to estimate multipath/NLoS effects.
- By utilizing a clustering algorithm, specifically DBSCAN, to isolate the other components in the defined leftover term, a procedure is proposed to estimate the values of multipath/NLoS biases if multipath/NLoS effects are present.
2. Definition and Computation of the Leftover Term
- is the pseudorange measurement obtained from the GNSS receiver for satellite s at time t;
- c is the speed of light in vacuum;
- is the signal instrumental delay of the receiver;
- is the clock bias of the receiver at time t;
- is the mass center position of the satellite under Earth Centered Earth Fixed (ECEF) frames at time t;
- is the antenna reference point position of the receiver under ECEF frames at time t;
- is the signal instrumental delay of the satellite;
- is clock bias of the satellite at time t;
- is the delay caused by space–time curvature of the relativistic effect at time t;
- is satellite clock bias caused by the relativistic effect at time t;
- is antenna phase center corrections for both transmitting and receiving antennas at time t;
- is the error contribution of the pseudorange measurement due to the ionospheric delay, expressed in meters at time t;
- is the error contribution of the pseudorange measurement due to the tropospheric delay, expressed in meters at time t;
- is the error contribution of the pseudorange measurement due to the multipath/NLoS interference at time t, expressed in meters;
- is the error contribution of the pseudorange measurement due to the receiver noise at time t, expressed in meters.
3. Multipath/NLoS Bias Estimation Using a Clustering Algorithm
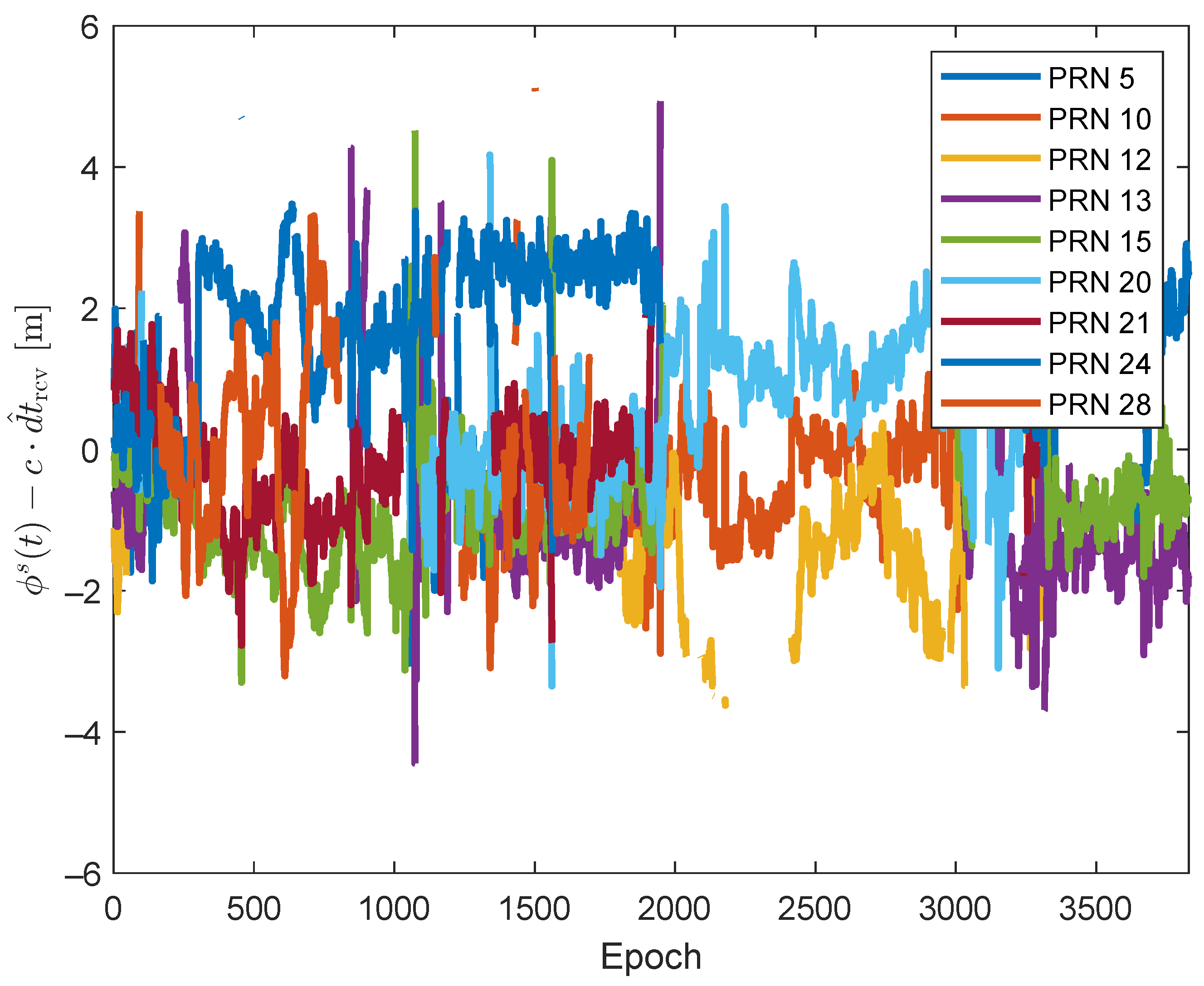
3.1. Statistical Characterization of the Leftover Terms
- The error contribution of the pseudorange measurement due to the multipath/NLoS interference is usually different from one satellite to another. Furthermore, is zero if a satellite is free from both multipath and NLoS interference.
- The receiver noise is commonly characterized by a Gaussian distribution with a zero mean and constant variance under multipath/NLoS-free conditions [19]. However, when multipath/NLoS effects occur, the receiver noise still follows a Gaussian distribution with a zero mean and a different variance [20].
- The user clock bias term keeps the same value for every satellite for a certain epoch.
3.2. DBSCAN, a Clustering Algorithm for Multipath/NLoS Estimation
- : the minimum number of points to form a cluster.
- : the maximum distance between two points to consider them neighbors.
- Core points: the data points can find at least neighbors within the radius .
- Non-core points (border points): within radius , the data points can find at least one core point but have no more than neighbors.
- Outliers: the data points do not satisfy either the definition of core points or the one of non-core points.
3.3. Implementation of Multipath/NLoS Estimation Based on DBSCAN
4. Experiments
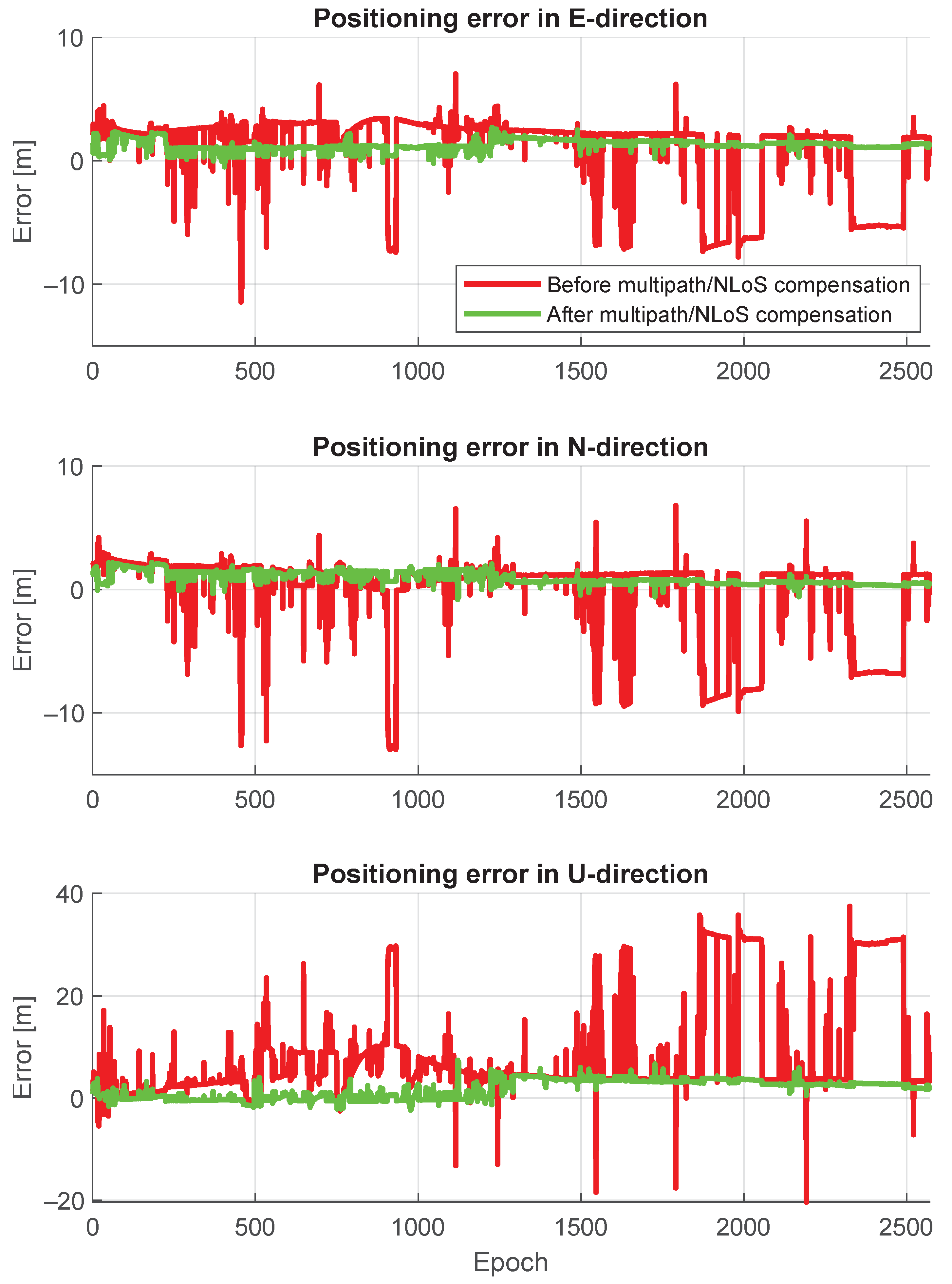
4.1. Static Experiment
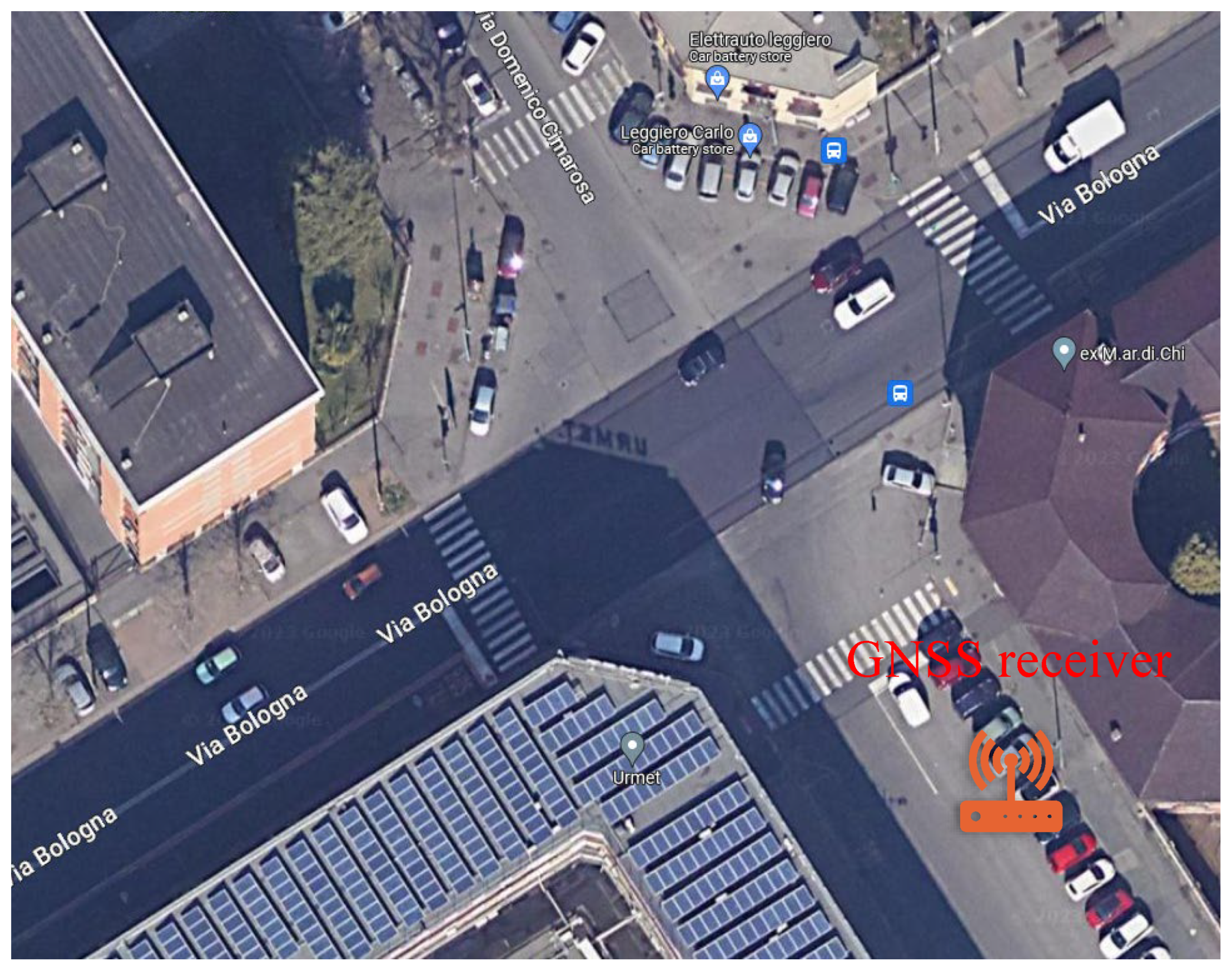
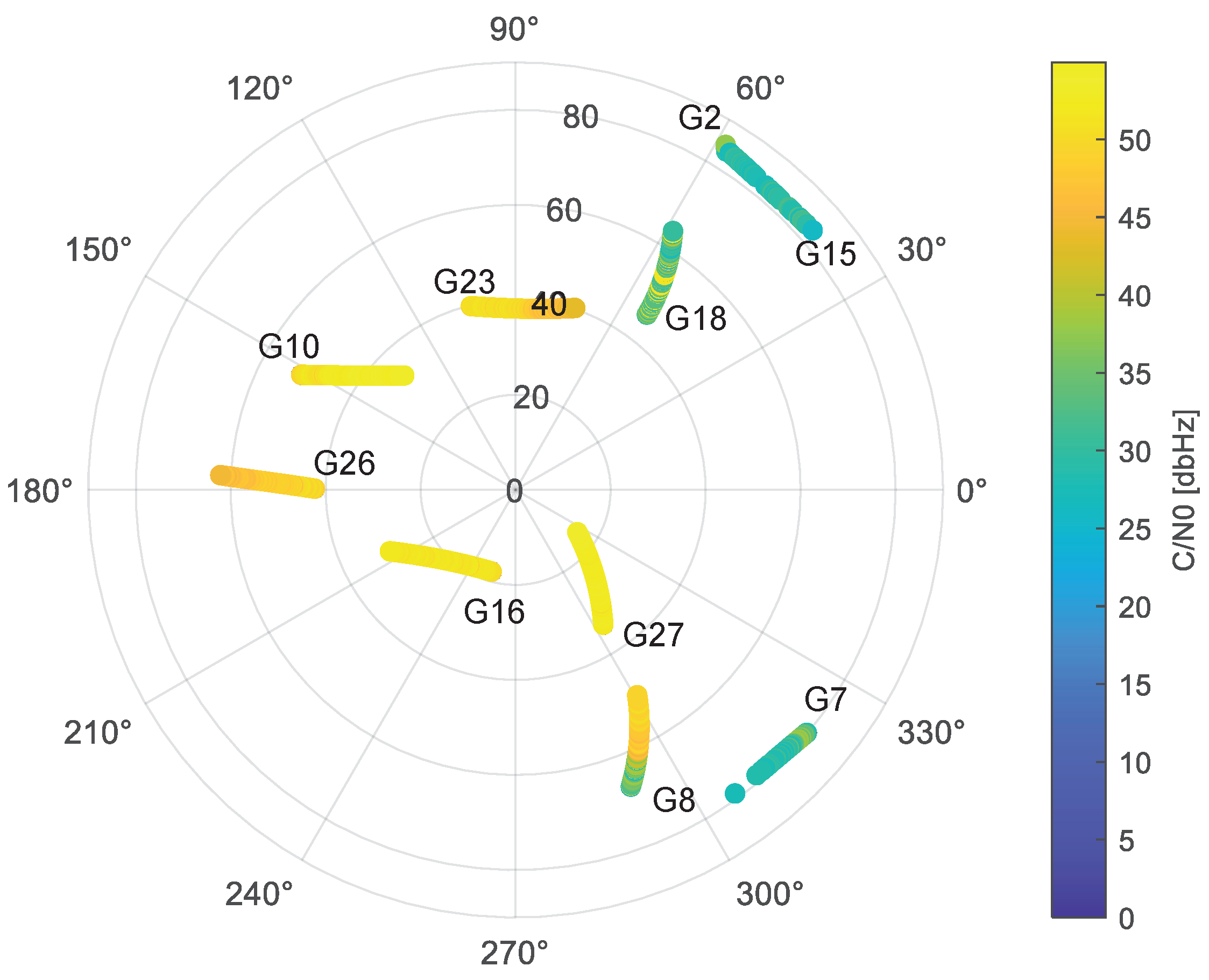
4.1.1. Experimental Setup
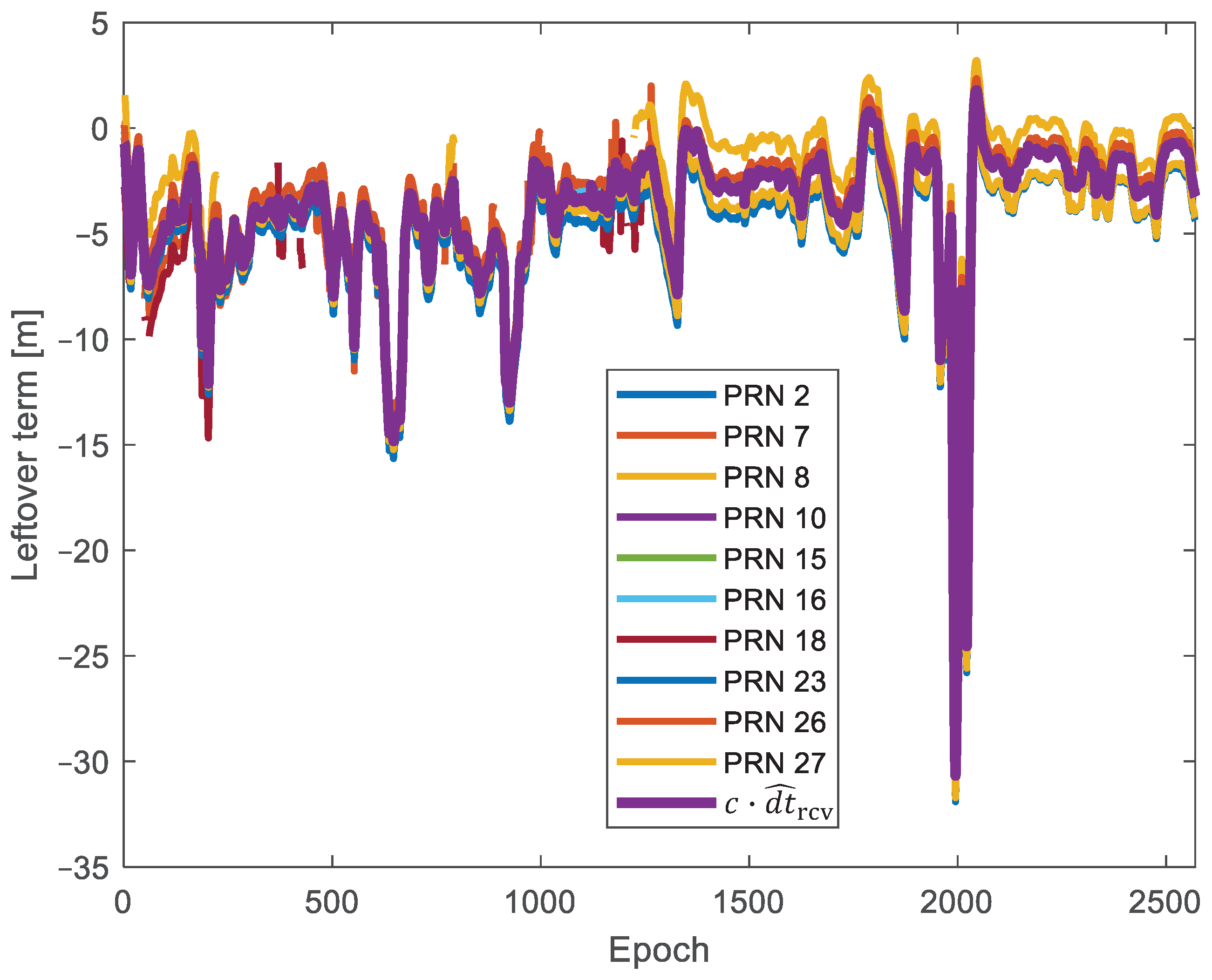
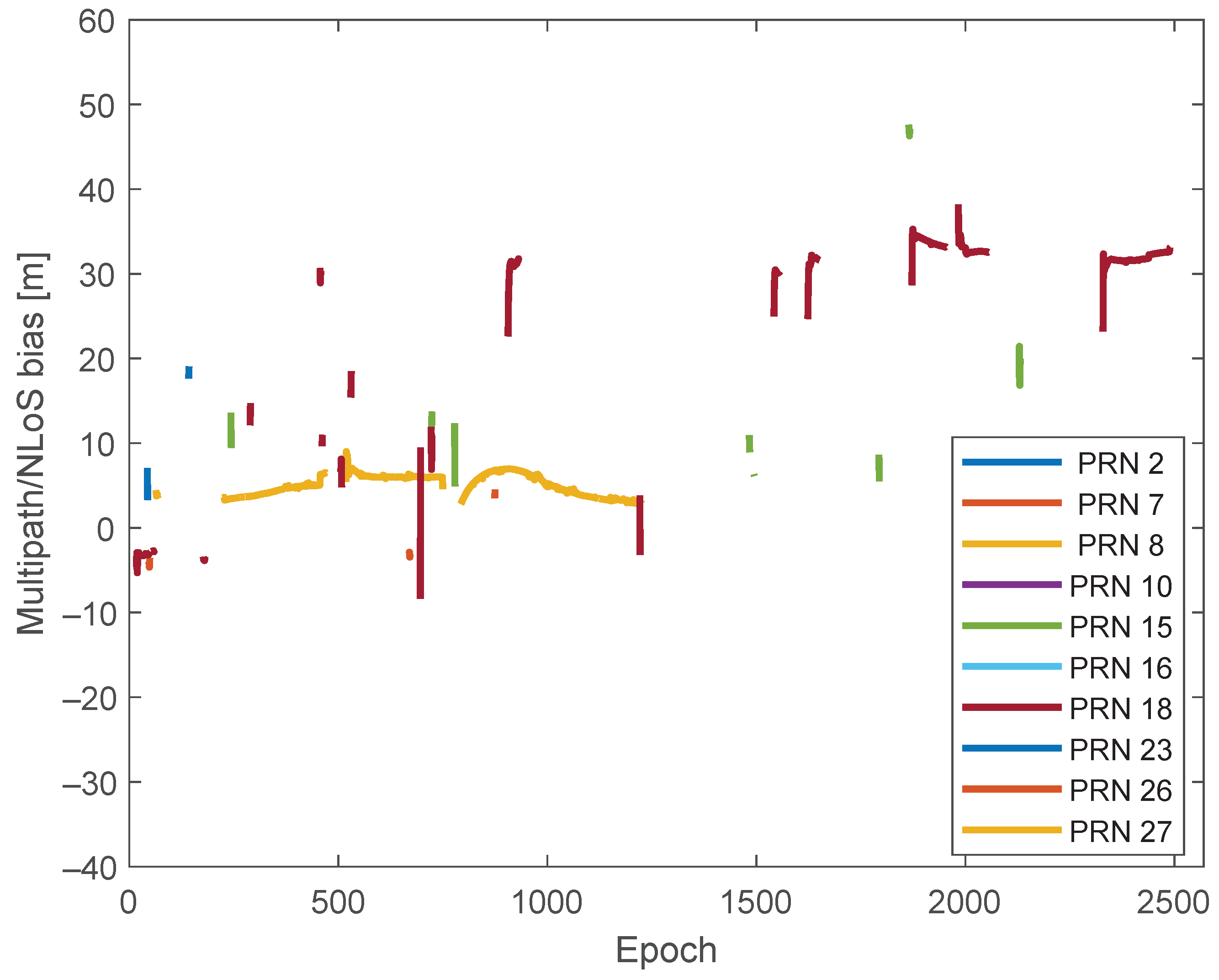
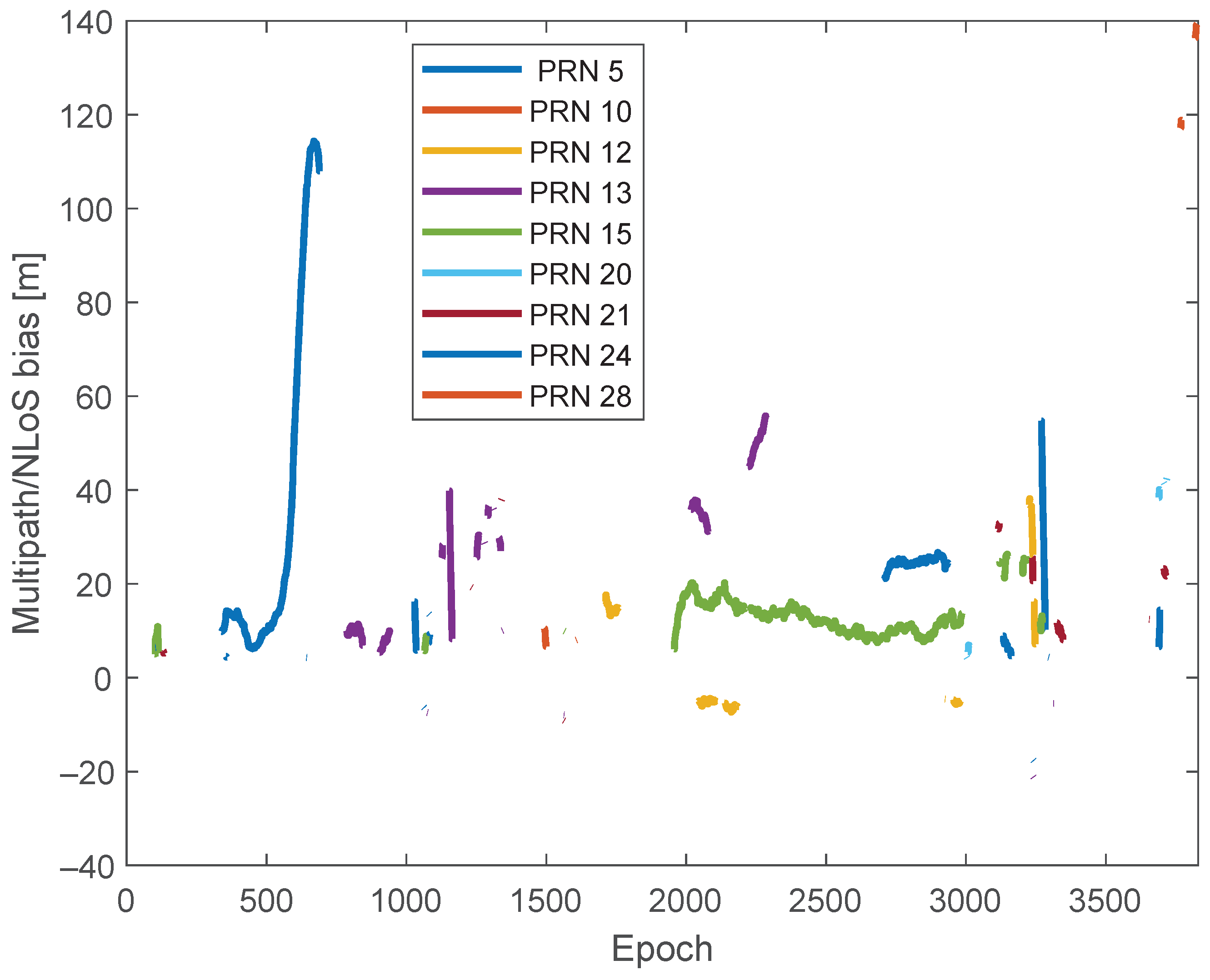
4.1.2. Experimental Results of Multipath/NLoS Estimation
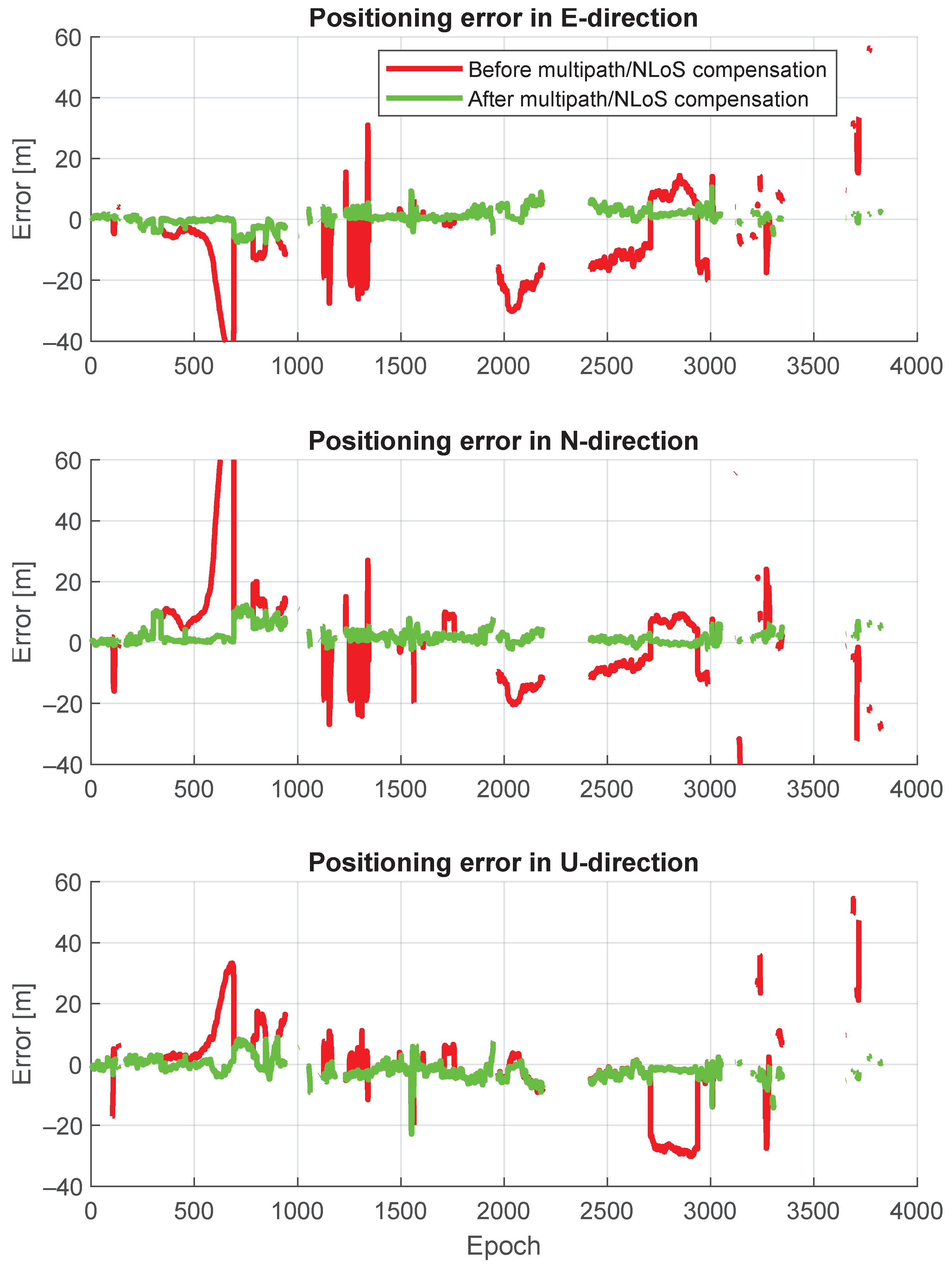
4.2. Dynamic Experiment
4.2.1. Experimental Setup
4.2.2. Experimental Results of Multipath/NLoS Estimation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Shapiro Effect Correction for
- is the gravitational constant of Earth.
Appendix B. Relativistic Clock Correction for
- a is the orbit semimajor axis;
- e is the orbit eccentricity;
- E is the eccentric anomaly of the satellite.
References
- Xie, P.; Petovello, M.G. Measuring GNSS multipath distributions in urban canyon environments. IEEE Trans. Instrum. Meas. 2014, 64, 366–377. [Google Scholar]
- McGraw, G.A.; Groves, P.D.; Ashman, B.W. Robust positioning in the presence of multipath and NLOS GNSS signals. In Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; John Wiley & Sons: Hoboken, NJ, USA, 2020; Volume 1, pp. 551–589. [Google Scholar]
- Strode, P.R.; Groves, P.D. GNSS multipath detection using three-frequency signal-to-noise measurements. GPS Solut. 2016, 20, 399–412. [Google Scholar] [CrossRef]
- Groves, P.D.; Jiang, Z.; Skelton, B.; Cross, P.A.; Lau, L.; Adane, Y.; Kale, I. Novel multipath mitigation methods using a dual-polarization antenna. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 140–151. [Google Scholar]
- Vagle, N.; Broumandan, A.; Jafarnia-Jahromi, A.; Lachapelle, G. Performance analysis of GNSS multipath mitigation using antenna arrays. J. Glob. Position. Syst. 2016, 14, 4. [Google Scholar] [CrossRef]
- McGraw, G.A.; Braasch, M.S. GNSS multipath mitigation using gated and high resolution correlator concepts. In Proceedings of the 1999 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 25–27 January 1999; pp. 333–342. [Google Scholar]
- Garin, L.; Rousseau, J.M. Enhanced strobe correlator multipath rejection for code & carrier. In Proceedings of the 10th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1997), Kansas City, MO, USA, 16–19 September 1997; pp. 559–568. [Google Scholar]
- Van Nee, R.D.; Siereveld, J.; Fenton, P.C.; Townsend, B.R. The multipath estimating delay lock loop: Approaching theoretical accuracy limits. In Proceedings of the 1994 IEEE Position, Location and Navigation Symposium-PLANS’94, Las Vegas, NV, USA, 11–15 April 1994; IEEE: Piscataway, NJ, USA, 1994; pp. 246–251. [Google Scholar]
- Chen, X.; Dovis, F.; Pini, M.; Mulassano, P. Turbo architecture for multipath mitigation in global navigation satellite system receivers. IET Radar Sonar Navig. 2011, 5, 517–527. [Google Scholar] [CrossRef]
- Zhu, N.; Betaille, D.; Marais, J.; Berbineau, M. Extended Kalman filter (EKF) innovation-based integrity monitoring scheme with C/N 0 weighting. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Hsu, L.T. GNSS multipath detection using a machine learning approach. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Suzuki, T.; Kitamura, M.; Amano, Y.; Hashizume, T. High-accuracy GPS and GLONASS positioning by multipath mitigation using omnidirectional infrared camera. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 311–316. [Google Scholar]
- Lee, Y.; Park, B. Nonlinear regression-based GNSS multipath modelling in deep urban area. Mathematics 2022, 10, 412. [Google Scholar] [CrossRef]
- Suzuki, T.; Nakano, Y.; Amano, Y. NLOS multipath detection by using machine learning in urban environments. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 3958–3967. [Google Scholar]
- Guermah, B.; EL Ghazi, H.; Sadiki, T.; Guermah, H. A robust GNSS LOS/multipath signal classifier based on the fusion of information and machine learning for intelligent transportation systems. In Proceedings of the 2018 IEEE International Conference on Technology Management, Operations and Decisions (ICTMOD), Marrakech, Morocco, 21–23 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 94–100. [Google Scholar]
- Savas, C.; Dovis, F. Multipath Detection based on K-means Clustering. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3801–3811. [Google Scholar]
- Pan, Y.; Möller, G.; Soja, B. Machine learning-based multipath modeling in spatial domain applied to GNSS short baseline processing. GPS Solut. 2024, 28, 9. [Google Scholar] [CrossRef]
- Teunissen, P.J.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10, pp. 561–563. [Google Scholar]
- Blanch, J.; Walter, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A. Advanced RAIM user algorithm description: Integrity support message processing, fault detection, exclusion, and protection level calculation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2828–2849. [Google Scholar]
- Khanafseh, S.; Kujur, B.; Joerger, M.; Walter, T.; Pullen, S.; Blanch, J.; Doherty, K.; Norman, L.; de Groot, L.; Pervan, B. GNSS multipath error modeling for automotive applications. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 1573–1589. [Google Scholar]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 1–11. [Google Scholar] [CrossRef]
- Braasch, M.S. GPS multipath model validation. In Proceedings of the Position, Location and Navigation Symposium-PLANS’96, Atlanta, GA, USA, 22–25 April 1996; IEEE: Piscataway, NJ, USA, 1996; pp. 672–678. [Google Scholar]
- Sokhandan, N.; Curran, J.T.; Broumandan, A.; Lachapelle, G. An advanced GNSS code multipath detection and estimation algorithm. GPS Solut. 2016, 20, 627–640. [Google Scholar] [CrossRef]
- Takasu, T. RTKLIB: An Open Source Program Package for GNSS Positioning. 2020. Available online: https://www.rtklib.com/rtklib.htm (accessed on 1 January 2021).
- National Coordination Office for Space-Based Positioning, Navigation, and Timing. GPS Standard Positioning Service (SPS) Performance Standard; Technical Report. 2020. Available online: https://www.gps.gov/technical/ps/ (accessed on 18 March 2024).
- Hsu, L.T.; Kubo, N.; Wen, W.; Chen, W.; Liu, Z.; Suzuki, T.; Meguro, J. UrbanNav: An open-sourced multisensory dataset for benchmarking positioning algorithms designed for urban areas. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), Online, 20–24 September 2021; pp. 226–256. [Google Scholar]
- UrbanNavDataset. Available online: https://github.com/IPNL-POLYU/UrbanNavDataset (accessed on 5 October 2023).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Computation Method |
|---|---|
| Measurements from the receiver | |
| IGS final precise orbits products | |
| RTK or RTK/INS positioning solutions | |
| Absolute IGS phase center corrections (igs14.atx) | |
| Final solution of IGS combined GIMs | |
| Saastamoinen model | |
| TGD provided by navigation messages | |
| Clock biases of the satellites from navigation messages | |
| See Appendix A | |
| See Appendix B |
| Horizontal [m] | Vertical [m] | |
|---|---|---|
| Before Compensation | 10.94 | 31.04 |
| After Compensation | 2.54 | 4.22 |
| Horizontal [m] | Vertical [m] | |
|---|---|---|
| Before Compensation | 38.75 | 28.68 |
| After Compensation | 9.98 | 6.43 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Zocca, S.; Dabove, P.; Dovis, F. A Post-Processing Multipath/NLoS Bias Estimation Method Based on DBSCAN. Sensors 2024, 24, 2611. https://doi.org/10.3390/s24082611
Guo Y, Zocca S, Dabove P, Dovis F. A Post-Processing Multipath/NLoS Bias Estimation Method Based on DBSCAN. Sensors. 2024; 24(8):2611. https://doi.org/10.3390/s24082611
Chicago/Turabian StyleGuo, Yihan, Simone Zocca, Paolo Dabove, and Fabio Dovis. 2024. "A Post-Processing Multipath/NLoS Bias Estimation Method Based on DBSCAN" Sensors 24, no. 8: 2611. https://doi.org/10.3390/s24082611
APA StyleGuo, Y., Zocca, S., Dabove, P., & Dovis, F. (2024). A Post-Processing Multipath/NLoS Bias Estimation Method Based on DBSCAN. Sensors, 24(8), 2611. https://doi.org/10.3390/s24082611