

The Development of a Wearable Biofeedback System to Elicit Temporal Gait Asymmetry using Rhythmic Auditory Stimulation and an Assessment of Immediate Effects

Abstract
:1. Introduction
2. Materials and Methods
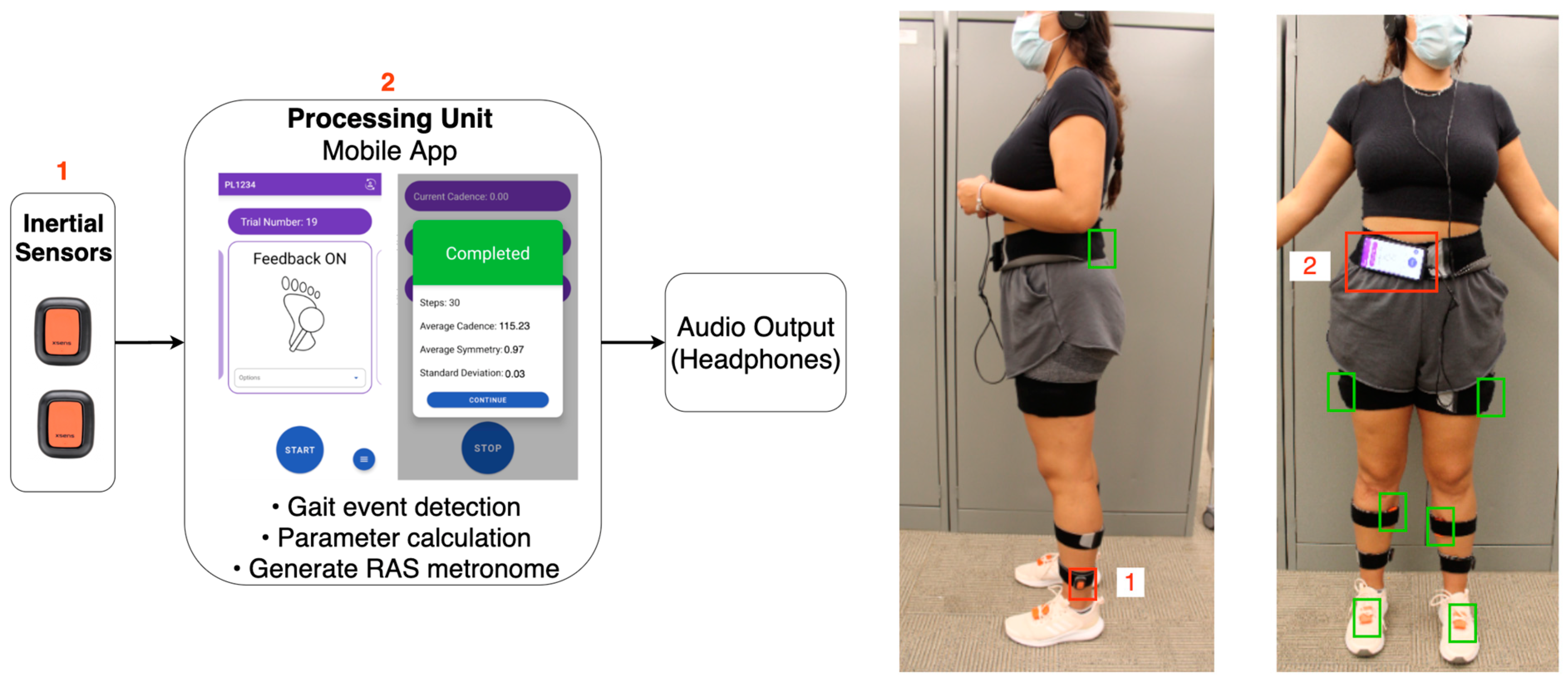
2.1. Instrumentation
2.2. RAS-Based BFB Strategies
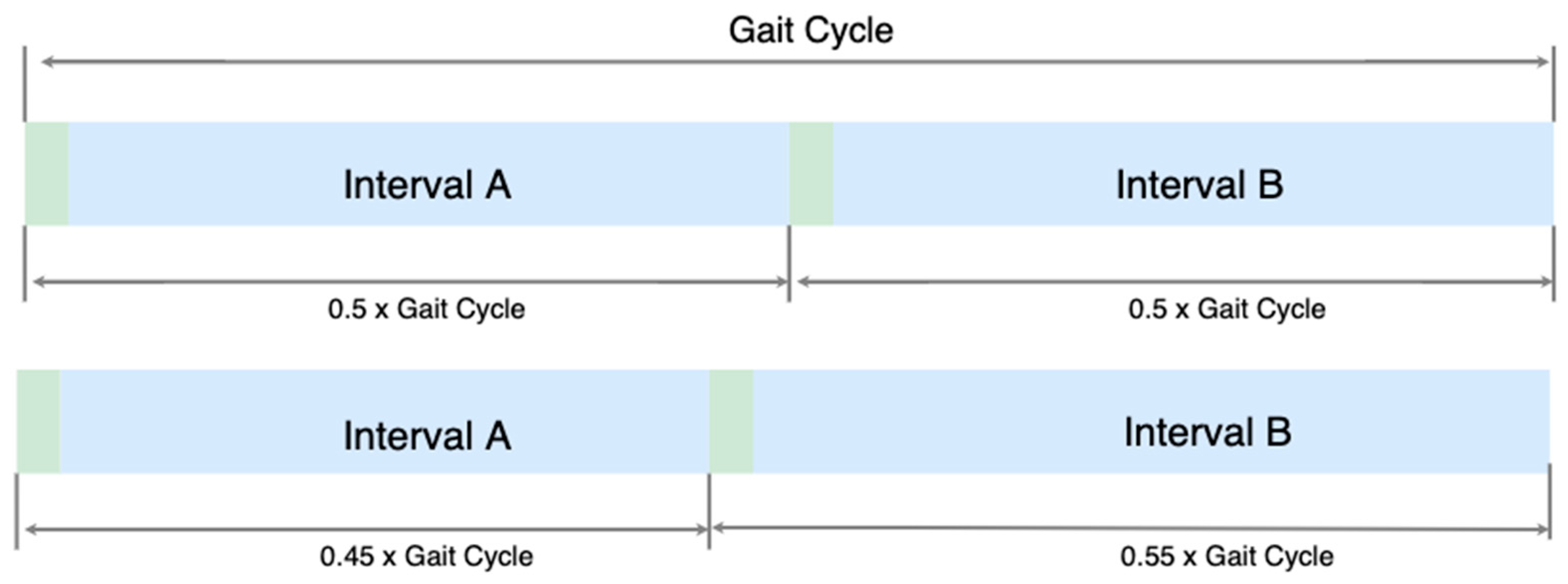
2.3. Meteronome Generator
2.4. Workload Assessment
2.5. Participants
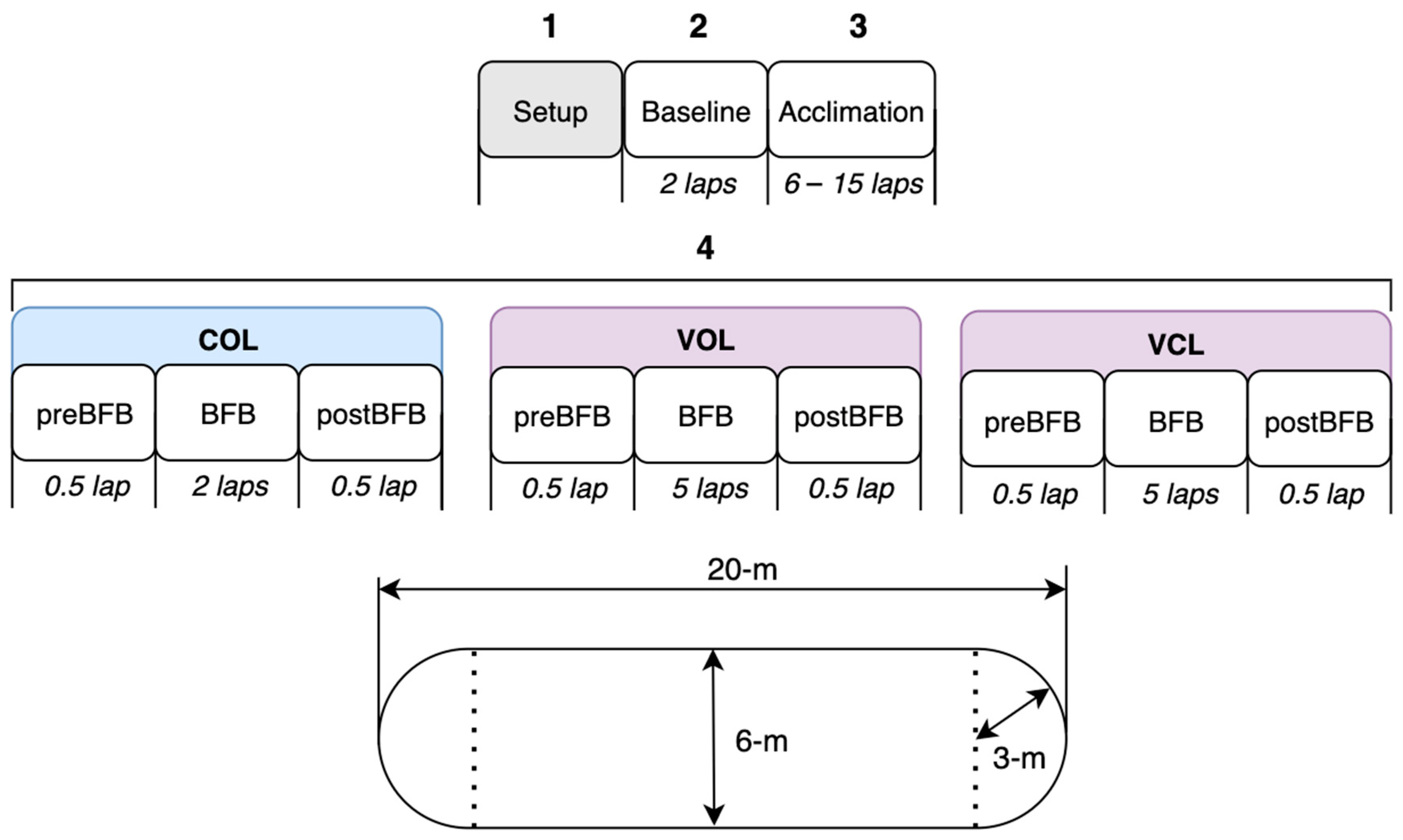
2.6. Experimental Protocol
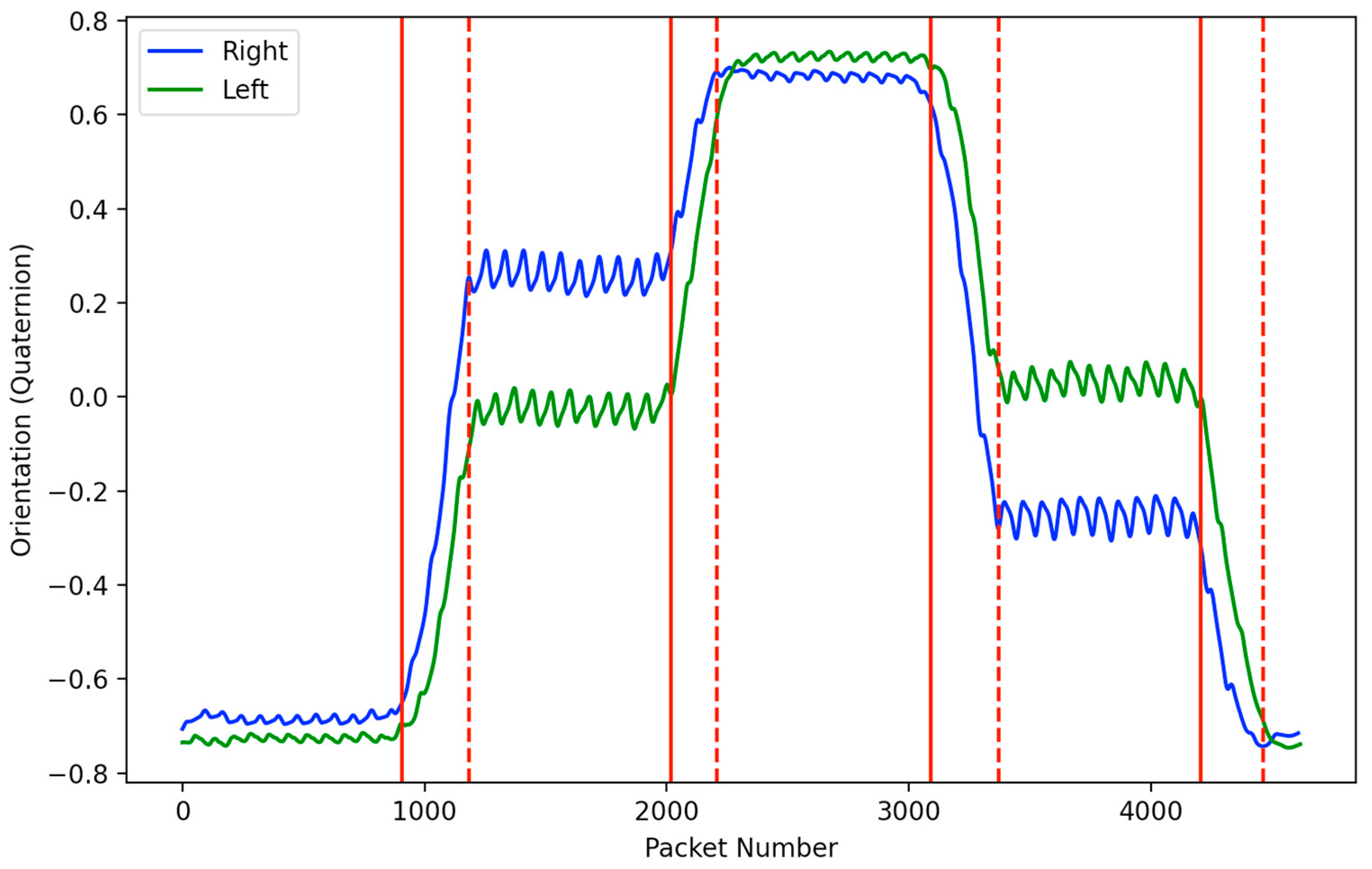
2.7. Post Processing
2.8. Data Analysis
- Performance of each strategy: STSR values during BFB were compared to the baseline to determine whether RAS induced any changes in the STSR for each strategy. Additionally, within each strategy, STSR values at each target level were compared to identify the most significant changes. Cadence and speed at each target level were also compared to the baseline (target STSR = 1) to detect any significant alterations;
- Comparison of strategies: Significant differences between each strategy were analyzed at each target level. Furthermore, workload was evaluated by comparing the NASA-TLX scores for significant differences between the strategies.
3. Results
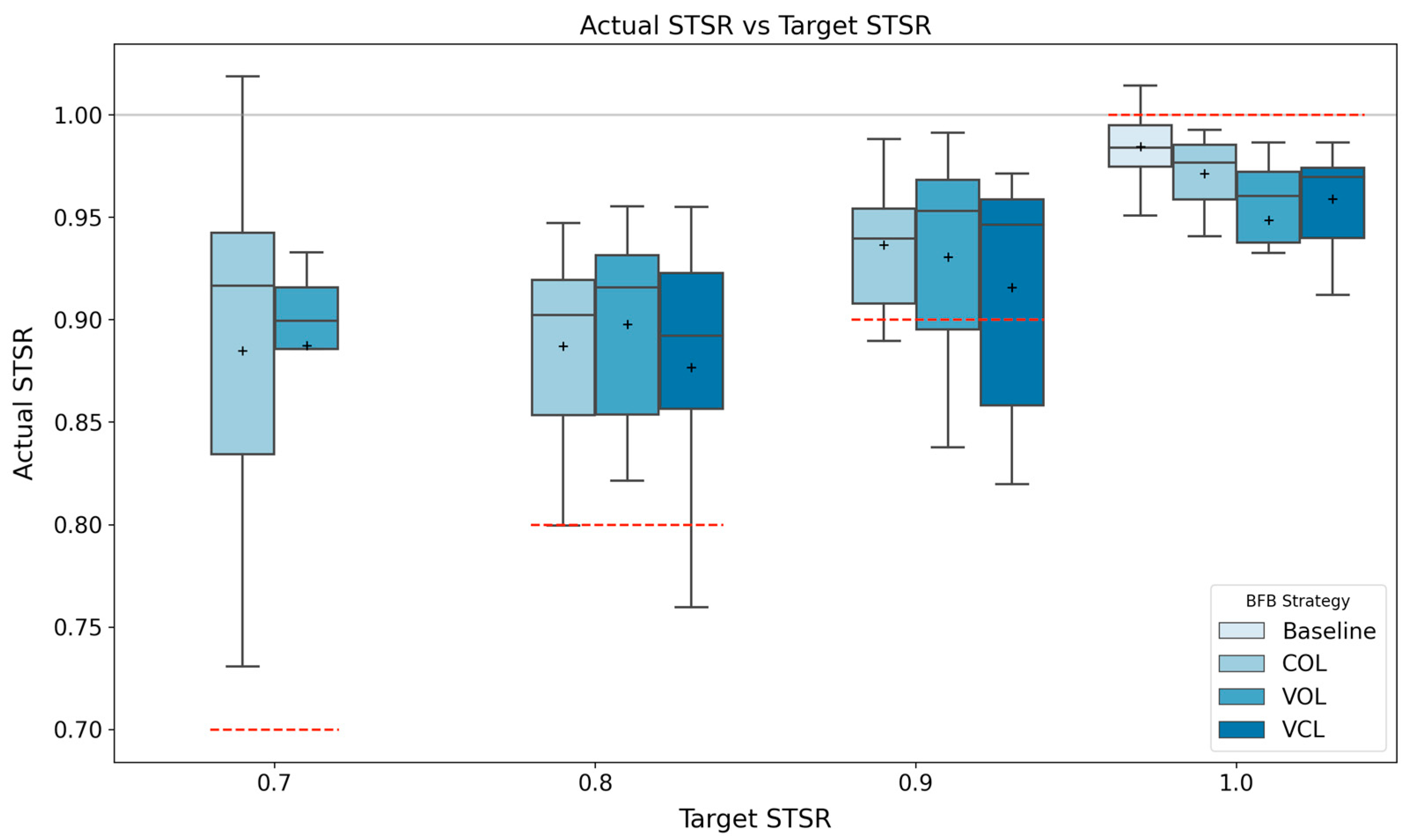
3.1. Performance of Each Strategy
3.2. Comparison of Strategies
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Morris, M.E.; Matyas, T.A.; Iansek, R.; Summers, J.J. Temporal Stability of Gait in Parkinson’s Disease. Phys. Ther. 1996, 76, 763–789. [Google Scholar] [CrossRef] [PubMed]
- Patterson, K.K.; Parafianowicz, I.; Danells, C.J.; Closson, V.; Verrier, M.C.; Staines, W.R.; Black, S.E.; McIlroy, W.E. Gait Asymmetry in Community-Ambulating Stroke Survivors. Arch. Phys. Med. Rehabil. 2008, 89, 304–310. [Google Scholar] [CrossRef]
- Adamczyk, P.G.; Kuo, A.D. Mechanisms of Gait Asymmetry Due to Push-off Deficiency in Unilateral Amputees. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 776–785. [Google Scholar] [CrossRef] [PubMed]
- Highsmith, M.J.; Andrews, C.R.; Millman, C.; Fuller, A.; Kahle, J.T.; Klenow, T.D.; Lewis, K.L.; Bradley, R.C.; Orriola, J.J. Gait Training Interventions for Lower Extremity Amputees: A Systematic Literature Review. Technol. Innov. 2016, 18, 99–113. [Google Scholar] [CrossRef] [PubMed]
- Böhm, H.; Döderlein, L. Gait Asymmetries in Children with Cerebral Palsy: Do They Deteriorate with Running? Gait Posture 2012, 35, 322–327. [Google Scholar] [CrossRef] [PubMed]
- Afzal, M.R.; Lee, H.; Eizad, A.; Lee, C.H.; Oh, M.K.; Yoon, J. Effects of Vibrotactile Biofeedback Coding Schemes on Gait Symmetry Training of Individuals with Stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1617–1625. [Google Scholar] [CrossRef] [PubMed]
- Wong, C.K.; Vandervort, E.E.; Moran, K.M.; Adler, C.M.; Chihuri, S.T.; Youdan, G.A. Walking Asymmetry and Its Relation to Patient-Reported and Performance-Based Outcome Measures in Individuals with Unilateral Lower Limb Loss. Int. Biomech. 2022, 9, 33–41. [Google Scholar] [CrossRef]
- Sibley, K.M.; Tang, A.; Patterson, K.K.; Brooks, D.; McIlroy, W.E. Changes in Spatiotemporal Gait Variables over Time during a Test of Functional Capacity after Stroke. J. Neuroeng. Rehabil. 2009, 6, 27. [Google Scholar] [CrossRef]
- Crosby, L.D.; Chen, J.L.; Grahn, J.A.; Patterson, K.K. The Effect of Rhythm Abilities on Metronome-Cued Walking with an Induced Temporal Gait Asymmetry in Neurotypical Adults. J. Mot. Behav. 2022, 54, 267–280. [Google Scholar] [CrossRef]
- Roerdink, M.; Lamoth, C.J.C.; Kwakkel, G.; Van Wieringen, P.C.W.; Beek, P.J. Gait Coordination after Stroke: Benefits of Acoustically Paced Treadmill Walking. Phys. Ther. 2007, 87, 1009–1022. [Google Scholar] [CrossRef]
- Michelini, A.; Sivasambu, H.; Andrysek, J. The Short-Term Effects of Rhythmic Vibrotactile and Auditory Biofeedback on the Gait of Individuals After Weight-Induced Asymmetry. Can. Prosthet. Orthot. J. 2022, 5. [Google Scholar] [CrossRef] [PubMed]
- Crosby, L.D.; Wong, J.S.; Chen, J.L.; Grahn, J.; Patterson, K.K. An Initial Investigation of the Responsiveness of Temporal Gait Asymmetry to Rhythmic Auditory Stimulation and the Relationship to Rhythm Ability Following Stroke. Front. Neurol. 2020, 11, 517028. [Google Scholar] [CrossRef] [PubMed]
- Eng, J.J.; Fang Tang, P. Gait Training Strategies to Optimize Walking Ability in People with Stroke: A Synthesis of the Evidence. Expert Rev. Neurother. 2011, 7, 1417–1436. [Google Scholar] [CrossRef] [PubMed]
- Escamilla-Nunez, R.; Gouda, A.; Andrysek, J. Evaluation of a Vibrotactile Biofeedback System Targeting Stance Time Symmetry Ratio of Individuals With Lower-Limb Amputation: A Pilot Study. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2581–2590. [Google Scholar] [CrossRef] [PubMed]
- Crea, S.; Edin, B.B.; Knaepen, K.; Meeusen, R.; Vitiello, N. Time-Discrete Vibrotactile Feedback Contributes to Improved Gait Symmetry in Patients with Lower Limb Amputations: Case Series. Phys. Ther. 2017, 97, 198–207. [Google Scholar] [CrossRef] [PubMed]
- Stefan, S.; Askew, C.D.; Abel, T.; Strüder, H.K. Exercise, Music, and the Brain: Is There a Central Pattern Generator? J. Sports Sci. 2010, 28, 1337–1343. [Google Scholar] [CrossRef]
- Peters, D.M.; O’Brien, E.S.; Kamrud, K.E.; Roberts, S.M.; Rooney, T.A.; Thibodeau, K.P.; Balakrishnan, S.; Gell, N.; Mohapatra, S. Utilization of Wearable Technology to Assess Gait and Mobility Post-Stroke: A Systematic Review. J. Neuroeng. Rehabil. 2021, 18, 67. [Google Scholar] [CrossRef]
- Bowman, T.; Gervasoni, E.; Arienti, C.; Lazzerini, S.G.; Negrini, S.; Crea, S.; Cattaneo, D.; Carrozza, M.C. Wearable Devices for Biofeedback Rehabilitation: A Systematic Review and Meta-Analysis to Design Application Rules and Estimate the Effectiveness on Balance and Gait Outcomes in Neurological Diseases. Sensors 2021, 21, 3444. [Google Scholar] [CrossRef]
- Pinheiro, C.; Lopes, J.M.; Figueiredo, J.; Goncalves, L.M.; Santos, C.P. Design and Technical Validation of a Wearable Biofeedback System for Robotic Gait Rehabilitation. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions, ICARSC 2020, Ponta Delgada, Portugal, 15–17 April 2020; pp. 16–21. [Google Scholar] [CrossRef]
- Gouda, A.; Andrysek, J. Rules-Based Real-Time Gait Event Detection Algorithm for Lower-Limb Prosthesis Users during Level-Ground and Ramp Walking. Sensors 2022, 22, 8888. [Google Scholar] [CrossRef]
- Sadeghi, H.; Allard, P.; Prince, F.; Labelle, H. Symmetry and Limb Dominance in Able-Bodied Gait: A Review. Gait Posture 2000, 12, 34–45. [Google Scholar] [CrossRef]
- Al-Juaid, R.; Al-Amri, M. An Evaluation of Symmetries in Ground Reaction Forces during Self-Paced Single-and Dual-Task Treadmill Walking in the Able-Bodied Men. Symmetry 2020, 12, 2101. [Google Scholar] [CrossRef]
- Crosby, L.D.; Chen, J.L.; Grahn, J.A.; Patterson, K.K. Perceptions of an Over-Ground Induced Temporal Gait Asymmetry by Healthy Young Adults. Hum. Mov. Sci. 2021, 78, 102806. [Google Scholar] [CrossRef] [PubMed]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. In Advances in Psychology; Elsevier: Amsterdam, The Netherlands, 1988; pp. 139–183. [Google Scholar]
- Zhang, H.; Yin, Y.; Chen, Z.; Zhang, Y.; Rao, A.K.; Guo, Y.; Zanotto, D. Wearable Biofeedback System to Induce Desired Walking Speed in Overground Gait Training. Sensors 2020, 20, 4002. [Google Scholar] [CrossRef] [PubMed]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Accuracy and Repeatability of Single-Pose Calibration of Inertial Measurement Units for Whole-Body Motion Analysis. Gait Posture 2017, 54, 80–86. [Google Scholar] [CrossRef] [PubMed]
- Jouybari, A.; Ardalan, A.A.; Rezvani, M.H. Experimental Comparison between Mahoney and Complementary Sensor Fusion Algorithm for Attitude Determination by Raw Sensor Data of Xsens IMU on Buoy. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.—ISPRS Arch. 2017, 42, 497–502. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Hyun Lee, S.; Jin Lee, K.; Ho Song, C. Effects of Rhythmic Auditory Stimulation (RAS) on Gait Ability and Symmetry after Stroke. J. Phys. Ther. Sci. 2012, 24, 311–314. [Google Scholar]
- Escamilla-Nunez, R.; Sivasambu, H.; Andrysek, J. Exlporation of Vibrotactile Biofeedback Strategies to Induce Stance Time Asymmetries. Can. Prosthet. Orthot. J. 2022, 5. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategy | Description |
|---|---|
| Constant Open-Loop (COL) | The target STSR remained constant throughout the walking trial. Data were collected for the target STSR = 1.0, 0.9, 0.8, and 0.7. |
| Variable Open-Loop (VOL) | The target STSR decreased by an increment of 0.3–0.4% every full gait cycle. |
| Variable Closed-Loop (VCL) | The target STSR decreased by an increment of 3–4% only when the participant’s real-time STSR ∈ target STSR ± error. |
| STSR (Mean ± Std) | BFB vs. Baseline Trials (p-Values) | |||||||
|---|---|---|---|---|---|---|---|---|
| Target Cluster | Target Cluster | |||||||
| Strategy | 1 | 0.9 | 0.8 | 0.7 | 1 | 0.9 | 0.8 | 0.7 |
| COL | 0.97 ± 0.02 | 0.94 ± 0.03 | 0.90 ± 0.06 | 0.89 ± 0.09 | 0.355 | 0.028 | 0.006 | 0.02 |
| VOL | 0.95 ± 0.04 | 0.93 ± 0.05 | 0.90 ± 0.05 | 0.89 ± 0.05 | 0.065 | 0.027 | <0.001 | <0.001 |
| VCL | 0.96 ± 0.03 | 0.91 ± 0.06 | 0.88 ± 0.06 | - | 0.193 | 0.004 | 0.008 | - |
| STSR Change | Percent of STSR Change | |||||
|---|---|---|---|---|---|---|
| Target Cluster | COL | VOL | VCL | COL | VOL | VCL |
| 0.9 | 0.04 (0.02, 0.07) | 0.05 (0.02, 0.09) | 0.05 (0.02, 0.13) | 59.16 (21.23, 113.58) | 53.04 (21.02, 69.99) | 68.7 (21.98, 116.94) |
| 0.8 | 0.08 (0.05, 0.13) | 0.07 (0.03, 0.13) | 0.10 (0.06, 0.15) | 46.71 (24.91, 115.84) | 41.67 (18.93, 58.34) | 55.17 (32.55, 109.38) |
| 0.7 | 0.09 (0.05, 0.17) | 0.08 (0.05, 0.13) | - * | 33.21 (18.23, 125.32) | 34.7 (16.96, 48.74) | - * |
| STSR (p-Values) | Percent of STSR Change (p-Values) | |||||
|---|---|---|---|---|---|---|
| Target Pair | COL | VOL | VCL | COL | VOL | VCL |
| (1.0, 0.9) | <0.001 | 0.049 | <0.001 | - | - | - |
| (1.0, 0.8) | <0.001 | <0.001 | <0.001 | - | - | - |
| (1.0, 0.7) | <0.001 | <0.001 | - | - | - | - |
| (0.9, 0.8) | <0.001 | <0.001 | <0.001 | 0.076 | <0.001 | 0.103 |
| (0.9, 0.7) | <0.001 | <0.001 | - | <0.001 | <0.001 | - |
| (0.8, 0.7) | 0.1831 | 0.052 | - | <0.001 | <0.001 | - |
| Cadence (Steps/min) | Speed (m/s) | |||||||
|---|---|---|---|---|---|---|---|---|
| BFB Strategy | 1 | 0.9 | 0.8 | 0.7 | 1 | 0.9 | 0.8 | 0.7 |
| COL | 106.6 ± 6.9 | 106.2 ± 6.5 | 106.8 ± 6.8 | 106.3 ± 6.4 | 1.2 ± 0.15 | 1.19 ± 0.14 | 1.19 ± 0.13 | 1.16 ± 0.13 |
| VOL | 106.4 ± 6.9 | 106.4 ± 6.9 | 106.4 ± 6.9 | 105.4 ± 6.5 | 1.17 ± 0.14 | 1.15 ± 0.14 | 1.13 ± 0.14 | 1.14 ± 0.17 |
| VCL | 106.4 ± 6.9 | 106.5 ± 6.9 | 105.4 ± 6.5 | - ** | 1.18 ± 0.15 | 1.15 ± 0.14 | 1.12 ± 0.13 | - ** |
| Pairwise Comparison (p-values) | Pairwise Comparison (p-values) | |||||||
| COL | - * | 0.885 | 0.953 | 0.919 | - * | 0.941 | 0.916 | 0.580 |
| VOL | 0.945 | 0.946 | 0.946 | 0.948 | 0.726 | 0.501 | 0.386 | 0.574 |
| VCL | 0.952 | 0.957 | 0.956 | - ** | 0.846 | 0.557 | 0.403 | - ** |
| STSR (p-Values) | Percent of STSR Change (p-Values) | |||||
|---|---|---|---|---|---|---|
| Target Cluster | COL–VOL | COL–VCL | VOL–VCL | COL–VOL | COL–VCL | VOL–VCL |
| 1 | 0.004 | 0.028 | 0.285 | - | - | - |
| 0.9 | 0.469 | 0.002 | 0.005 | 0.331 | 0.004 | 0.049 |
| 0.8 | 0.481 | <0.001 | <0.001 | 0.638 | <0.001 | <0.001 |
| 0.7 | 0.34 | - | - | 0.474 | - | - |
| Limb Side | Time Error (ms) (Mean ± Std) | Pairwise Comparison (Right vs. Left Side) | ||||
|---|---|---|---|---|---|---|
| COL | VOL | VCL | COL | VOL | VCL | |
| Right | −88.9 ± 57.4 | −137.3 ± 36.8 | −146.1 ± 19.4 | 0.0309 | 0.0436 | 0.2219 |
| Left | −119.8 ± 70.7 | −174.1 ± 47.1 | −173.4 ± 50.1 | |||
| NASA-TLX Score (Mean ± Std) | Pairwise Comparison (p-Values) | |||||
|---|---|---|---|---|---|---|
| Factor | COL | VOL | VCL | COL–VOL | VOL–VCL | COL–VCL |
| Mental Demand | 44.5 ± 24.11 | 45.5 ± 26.84 | 55.5 ± 24.68 | 0.8760 | 0.0548 | 0.1599 |
| Physical Demand | 36 ± 18.44 | 35.5 ± 23 | 40 ± 22.48 | 0.9151 | 0.2042 | 0.4383 |
| Temporal Demand | 31.5 ± 19.47 | 36.5 ± 19.81 | 38.5 ± 20.89 | 0.4997 | 0.7509 | 0.1162 |
| Performance | 40.5 ± 30.84 | 34.5 ± 20.18 | 47.5 ± 24.84 | 0.3399 | 0.1186 | 0.2977 |
| Effort | 45 ± 25.73 | 51 ± 29.11 | 50 ± 25.8 | 0.3092 | 0.8363 | 0.4433 |
| Frustration | 25 ± 20.05 | 26 ± 20.23 | 27.5 ± 15.7 | 0.7435 | 0.7993 | 0.7080 |
| Overall Score | 42.33 ± 16.22 | 46.97 ± 16.26 | 49.43 ± 14.31 | 0.6194 | 0.3280 | 0.1558 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gouda, A.; Andrysek, J. The Development of a Wearable Biofeedback System to Elicit Temporal Gait Asymmetry using Rhythmic Auditory Stimulation and an Assessment of Immediate Effects. Sensors 2024, 24, 400. https://doi.org/10.3390/s24020400
Gouda A, Andrysek J. The Development of a Wearable Biofeedback System to Elicit Temporal Gait Asymmetry using Rhythmic Auditory Stimulation and an Assessment of Immediate Effects. Sensors. 2024; 24(2):400. https://doi.org/10.3390/s24020400
Chicago/Turabian StyleGouda, Aliaa, and Jan Andrysek. 2024. "The Development of a Wearable Biofeedback System to Elicit Temporal Gait Asymmetry using Rhythmic Auditory Stimulation and an Assessment of Immediate Effects" Sensors 24, no. 2: 400. https://doi.org/10.3390/s24020400
APA StyleGouda, A., & Andrysek, J. (2024). The Development of a Wearable Biofeedback System to Elicit Temporal Gait Asymmetry using Rhythmic Auditory Stimulation and an Assessment of Immediate Effects. Sensors, 24(2), 400. https://doi.org/10.3390/s24020400