


Variable Time-Step Physics Engine with Continuous Compliance Contact Model for Optimal Robotic Grinding Trajectory Planning †


Abstract
:1. Introduction
- (1)
- Development of a Novel Physics Engine: Central to our innovation is the development of a new physics engine based on the continuous compliance contact model. The analytical solution of the model facilitates the dynamic adaptation of contact forces throughout the simulation, leading to variable time-step integrator behavior.
- (2)
- Enhanced Collision Process Modeling: Our engine introduces a framework to model collision processes precisely. By adopting this advanced approach, we improve simulation-to-real conversion. This is achieved through careful calibration of stiffness and disturbance parameters, which is beneficial to enhancing the simulation accuracy of the entire simulation system.
- (3)
- Redefining Conventional Methods: This study challenges the traditional geometric constraint-based methods, signaling a significant paradigm shift toward more realistic and robust simulations in robotics. By leveraging a swift and stable analytical solution for dynamic equations, our approach ensures rapid acquisition of feedback force.
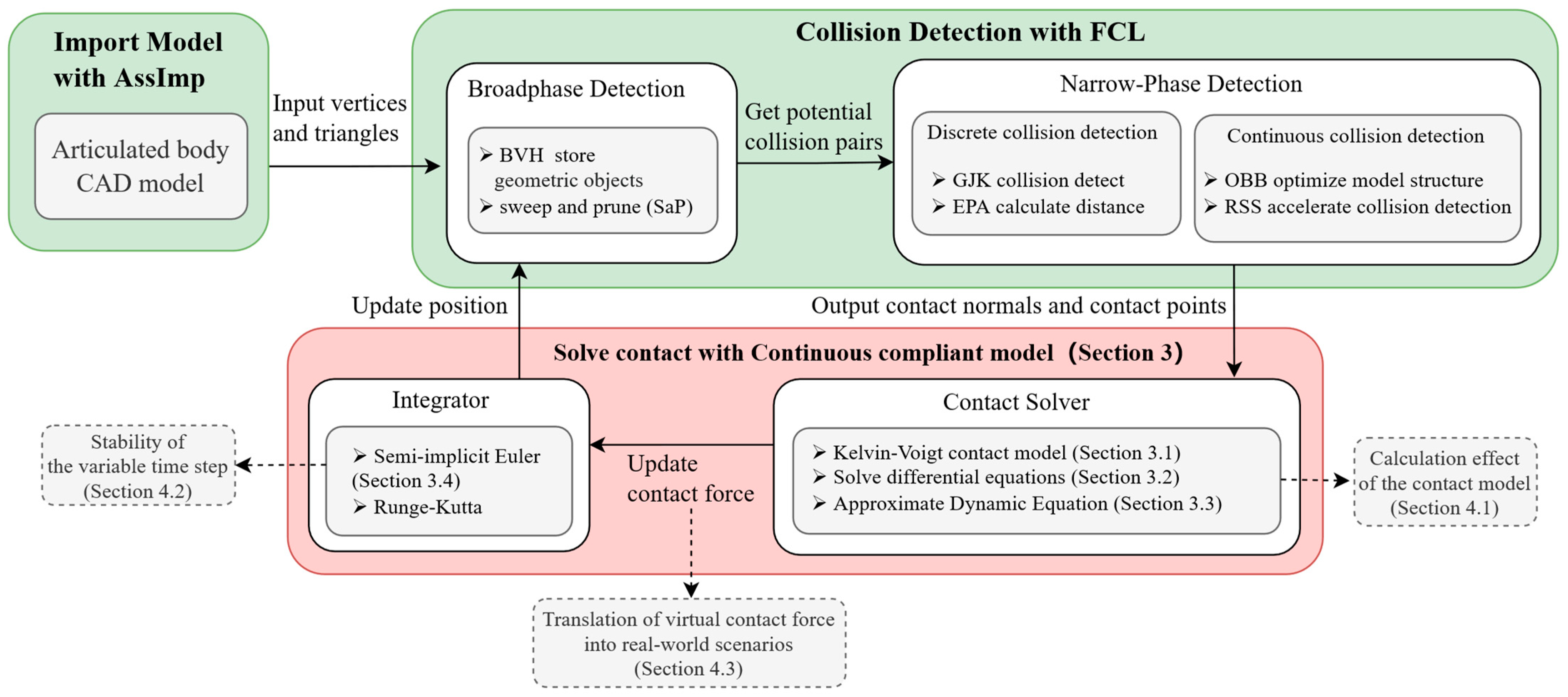
2. Framework of the Variable Time-Step Physics Engine
3. Construction Contact Solver Based on Continuous Compliance Model
3.1. Kelvin–Voigt Contact Model
3.2. Contact Force Calculation
3.3. Continuous Compliance Contact Model-Based Approximate Dynamic Equation
3.4. Semi-Implicit Euler Integrator
| Algorithm 1 Contact Solver base Force |
| Given parameters and |
| while True do |
| Get position of collide object |
| collide(A,B)//Collision detection for object A and B |
| if number of contact > 0 |
| Compute |
| for each contact i do |
| if contact is start |
| then ccd |
| else if contact is end |
| then //modify time of contact |
| end if |
| Compute with integrator |
| Compute |
| end for |
| end if |
| end while |
4. Experiment and Discussion
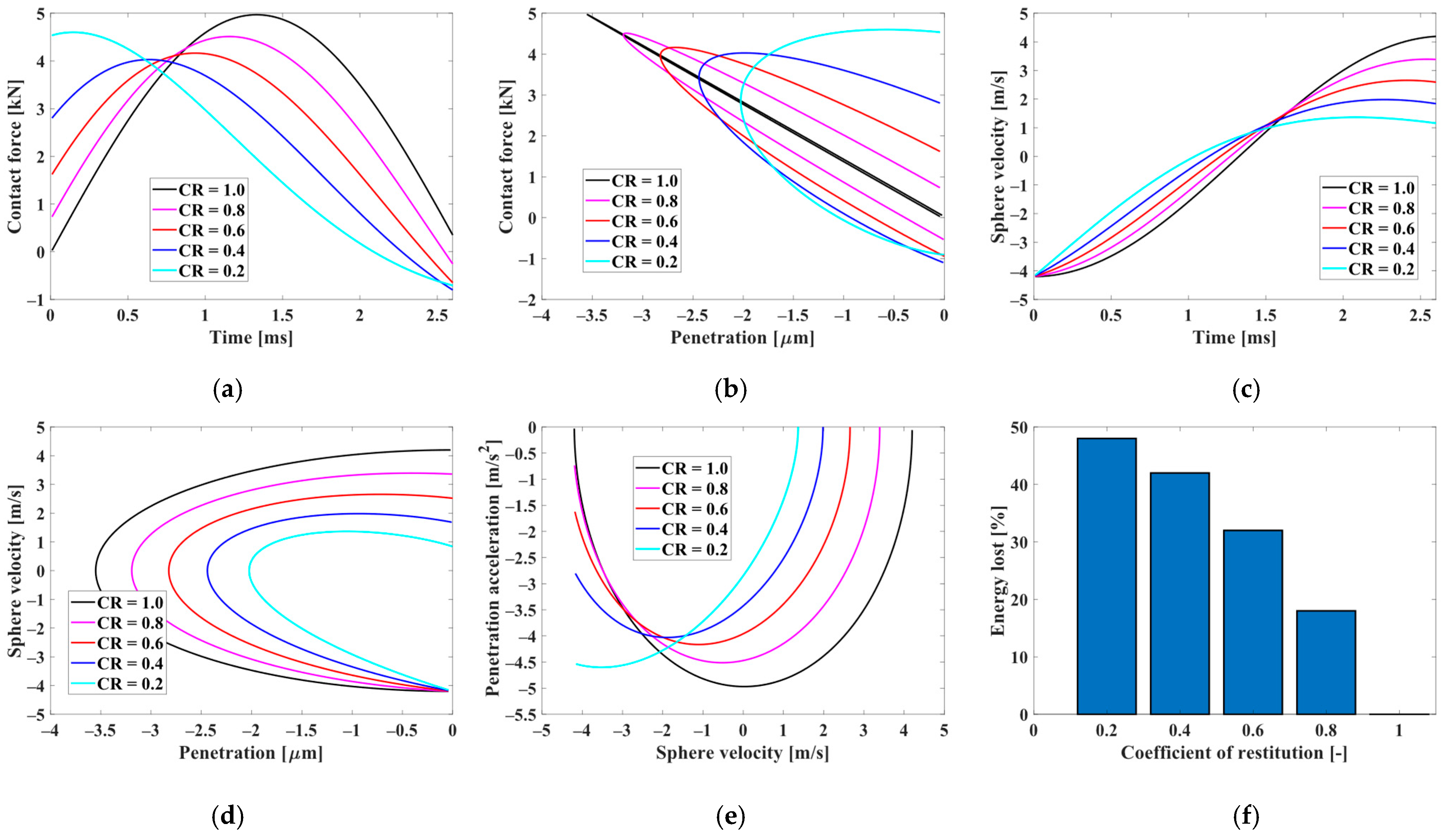
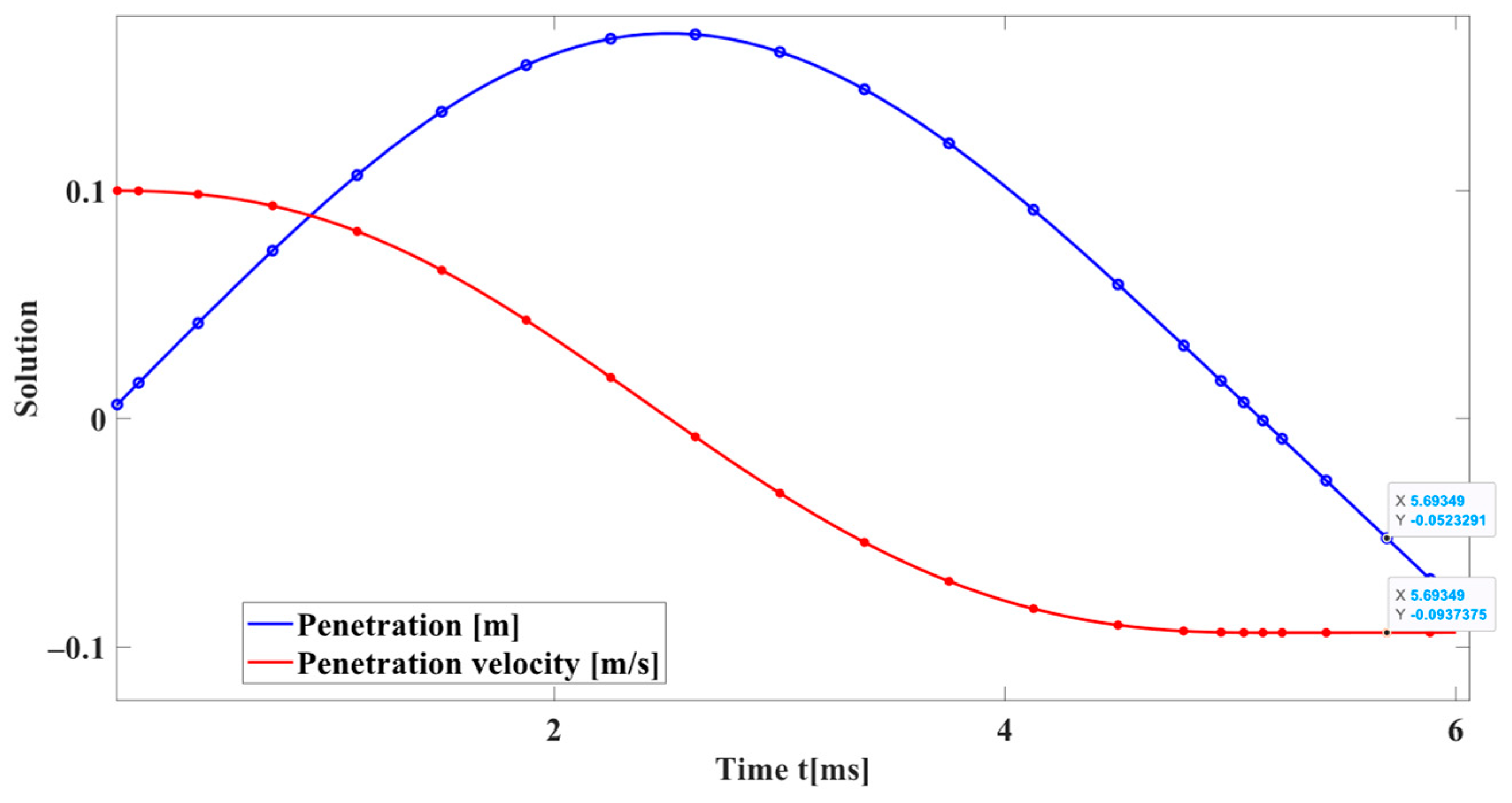
4.1. Bouncing Ball Experiment
4.2. Performance of Calculation Stability
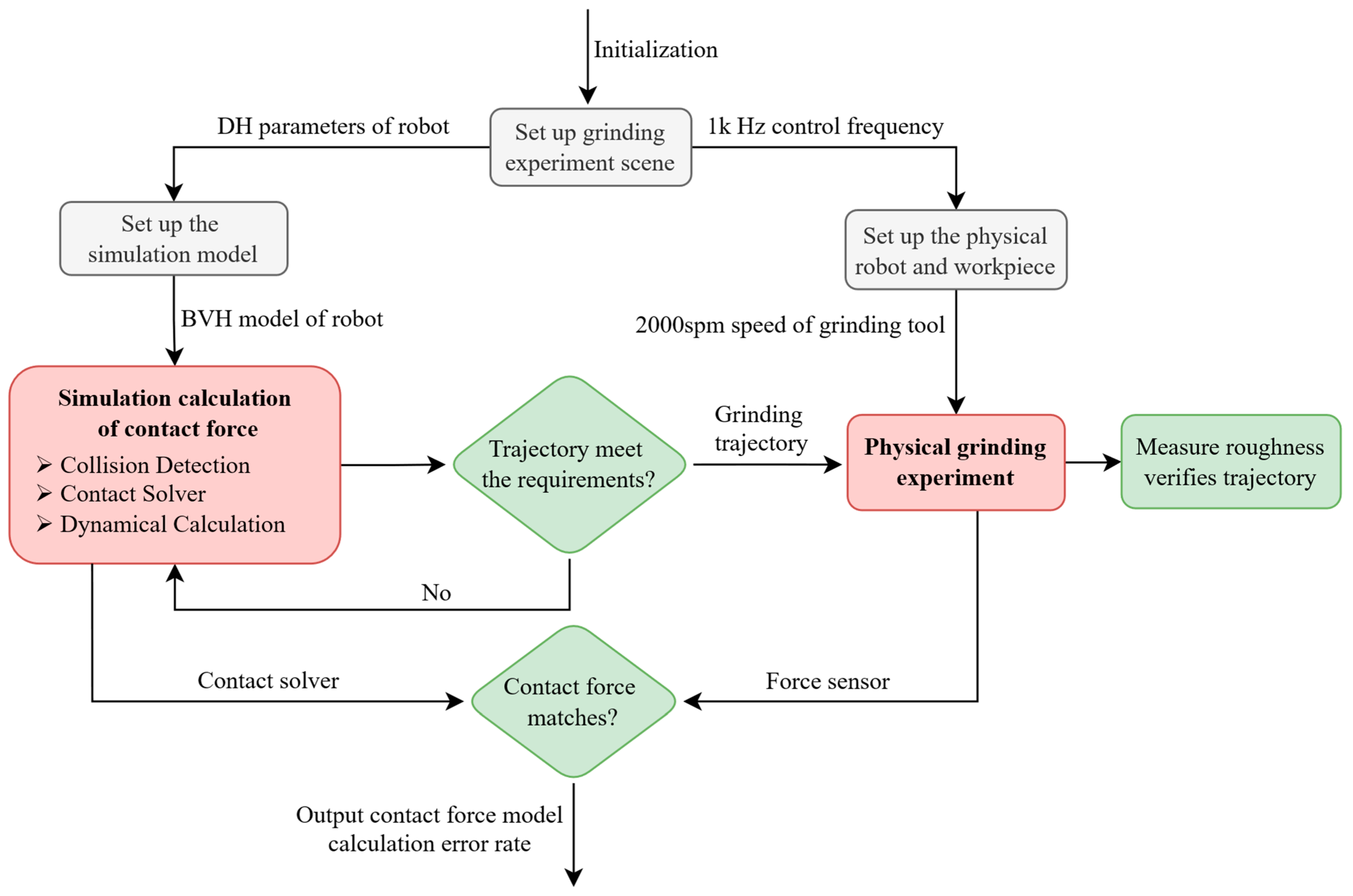
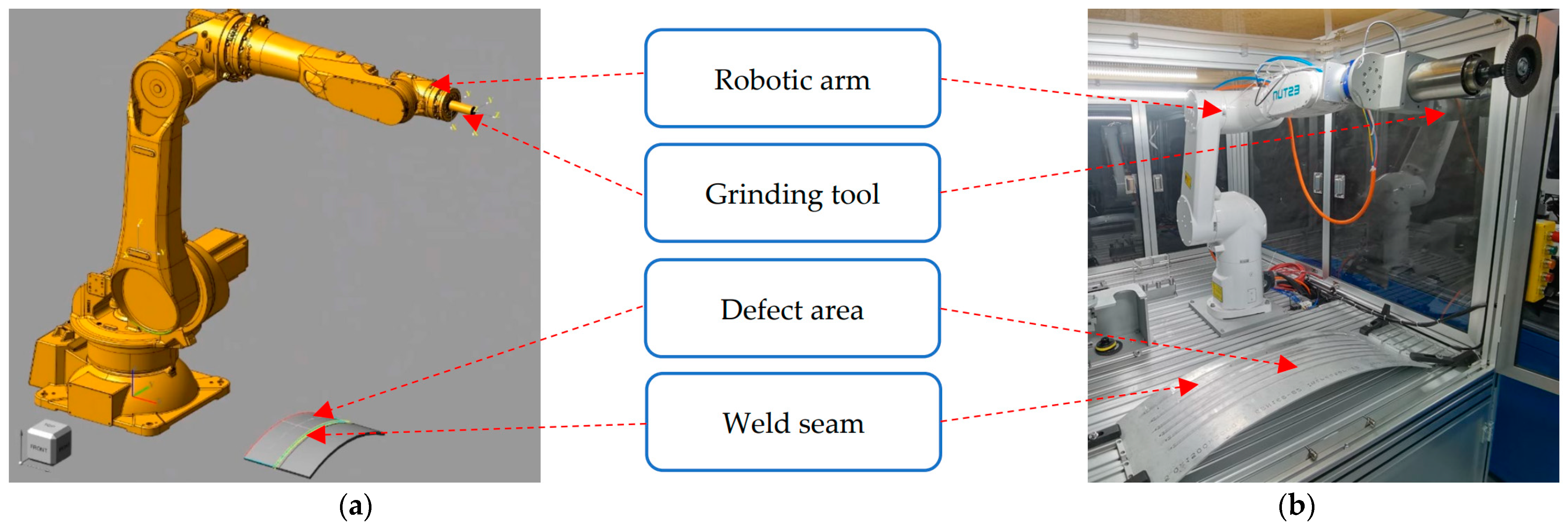
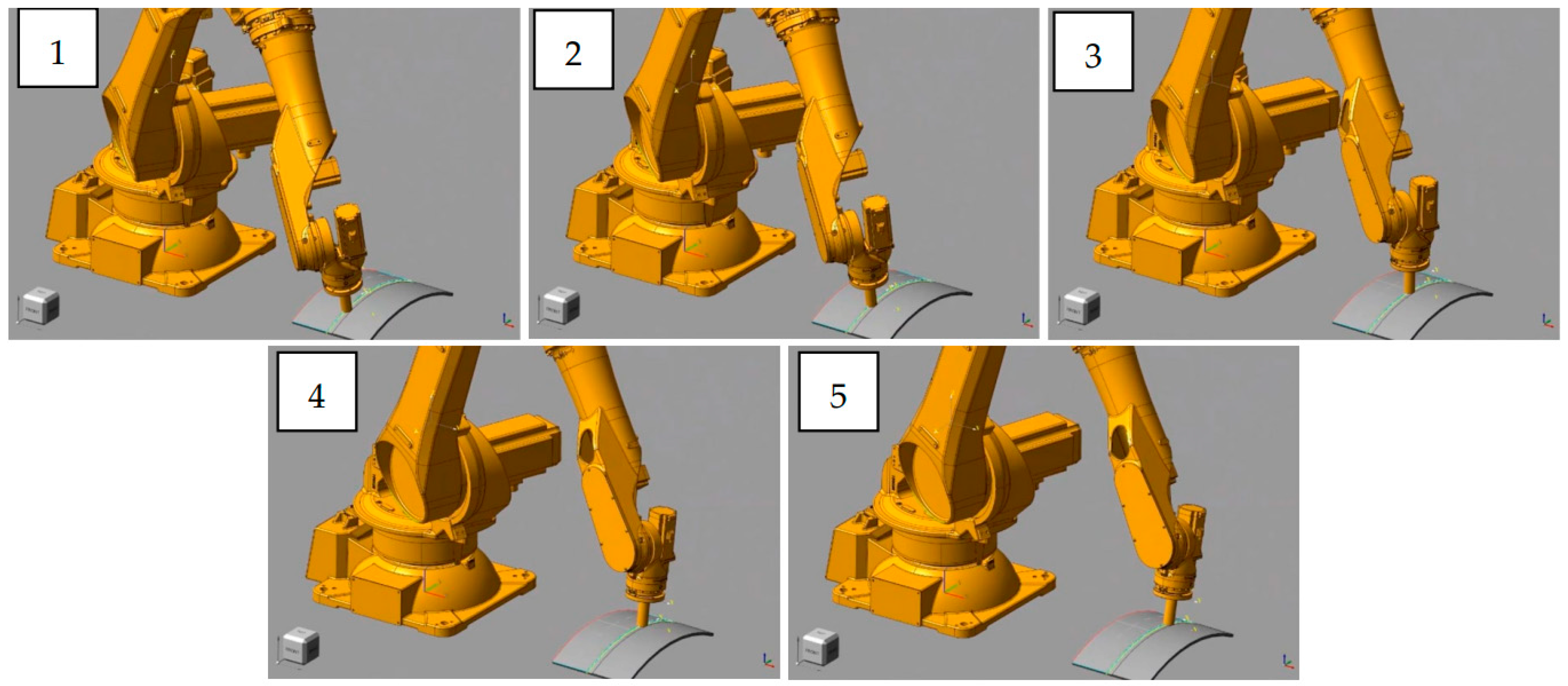
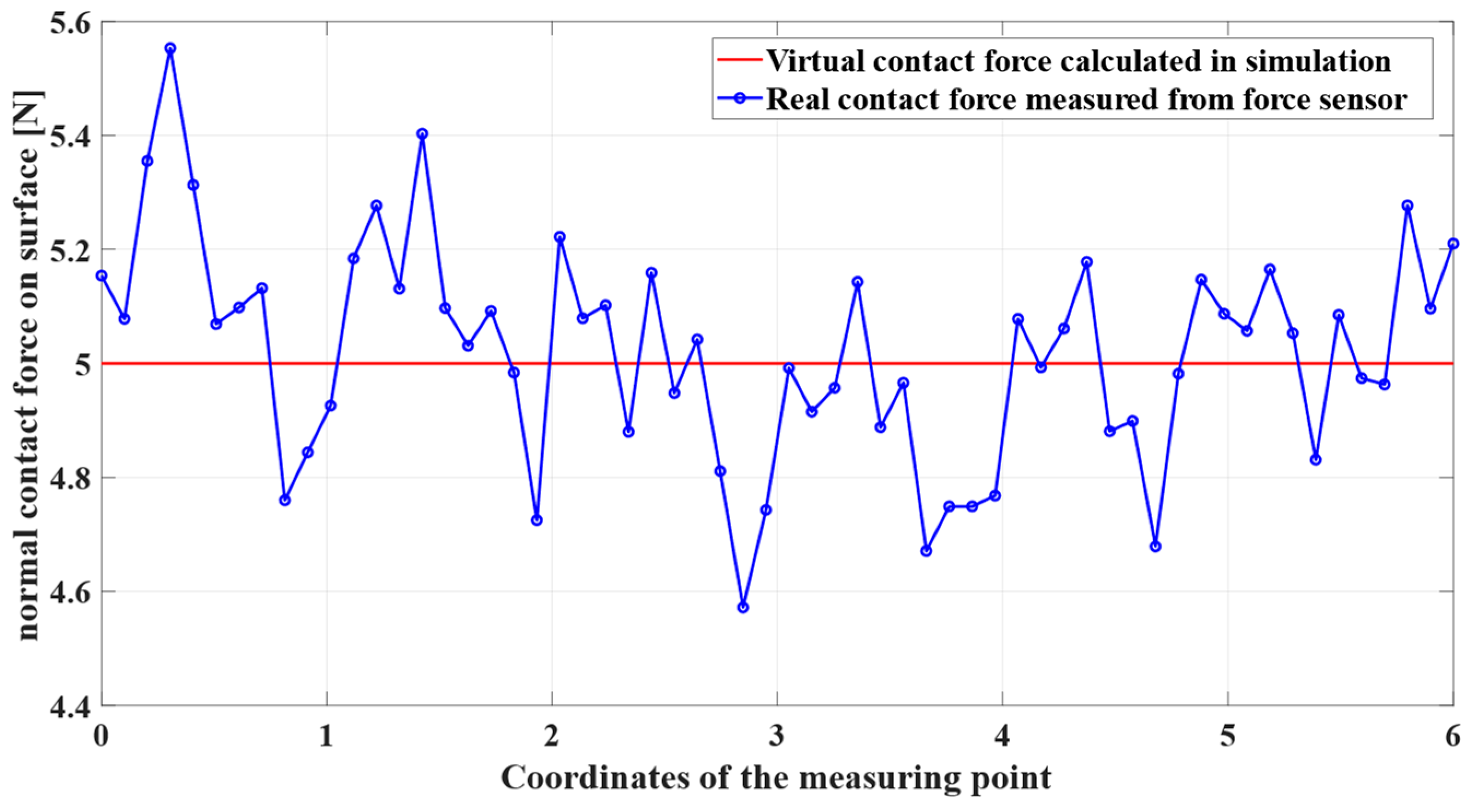
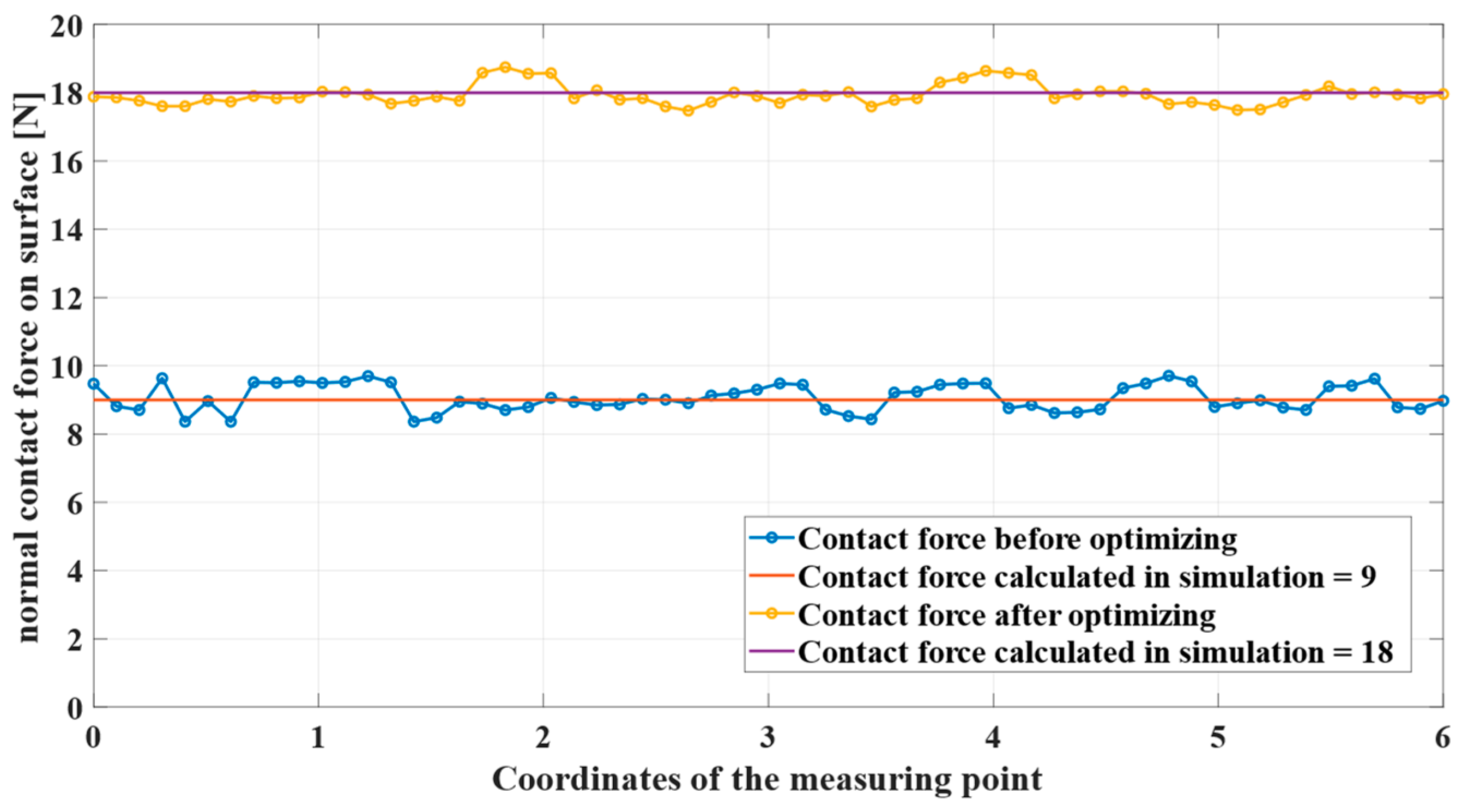
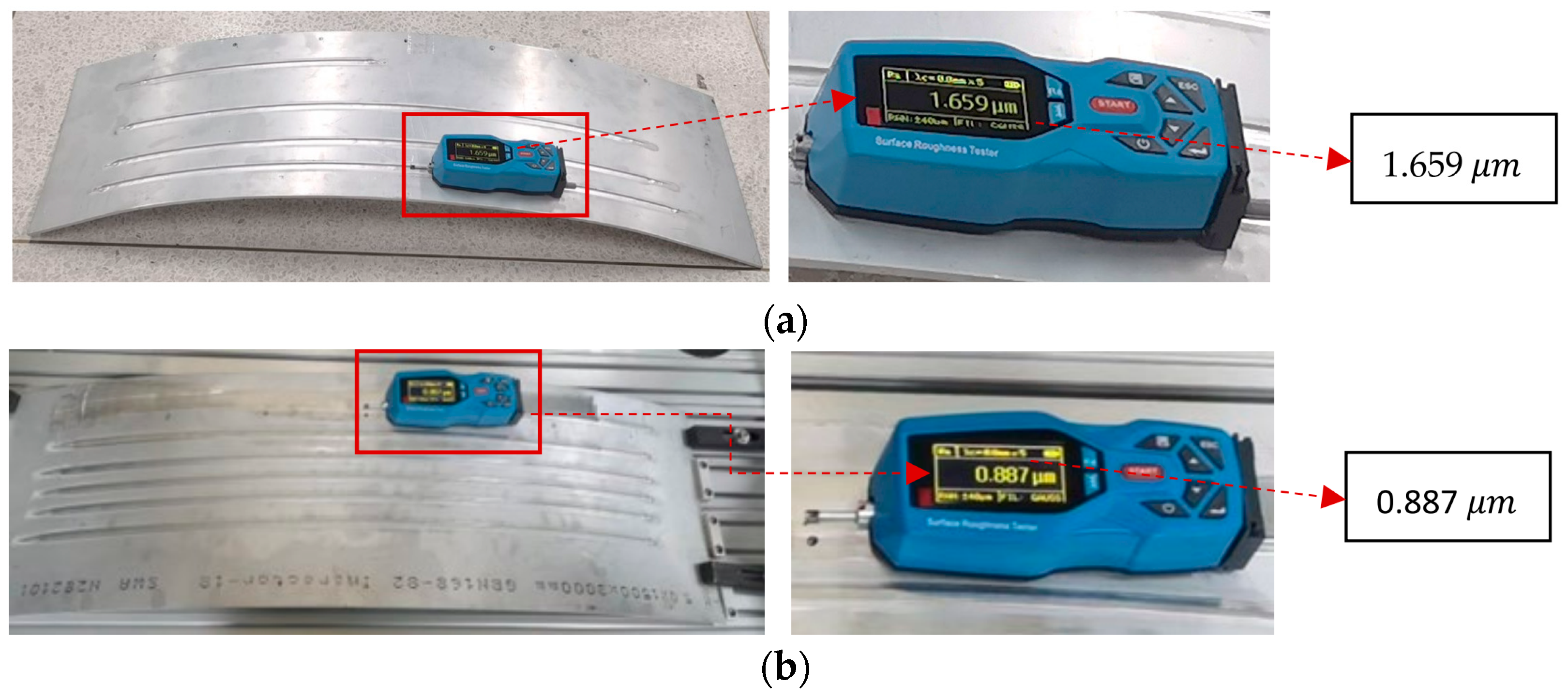
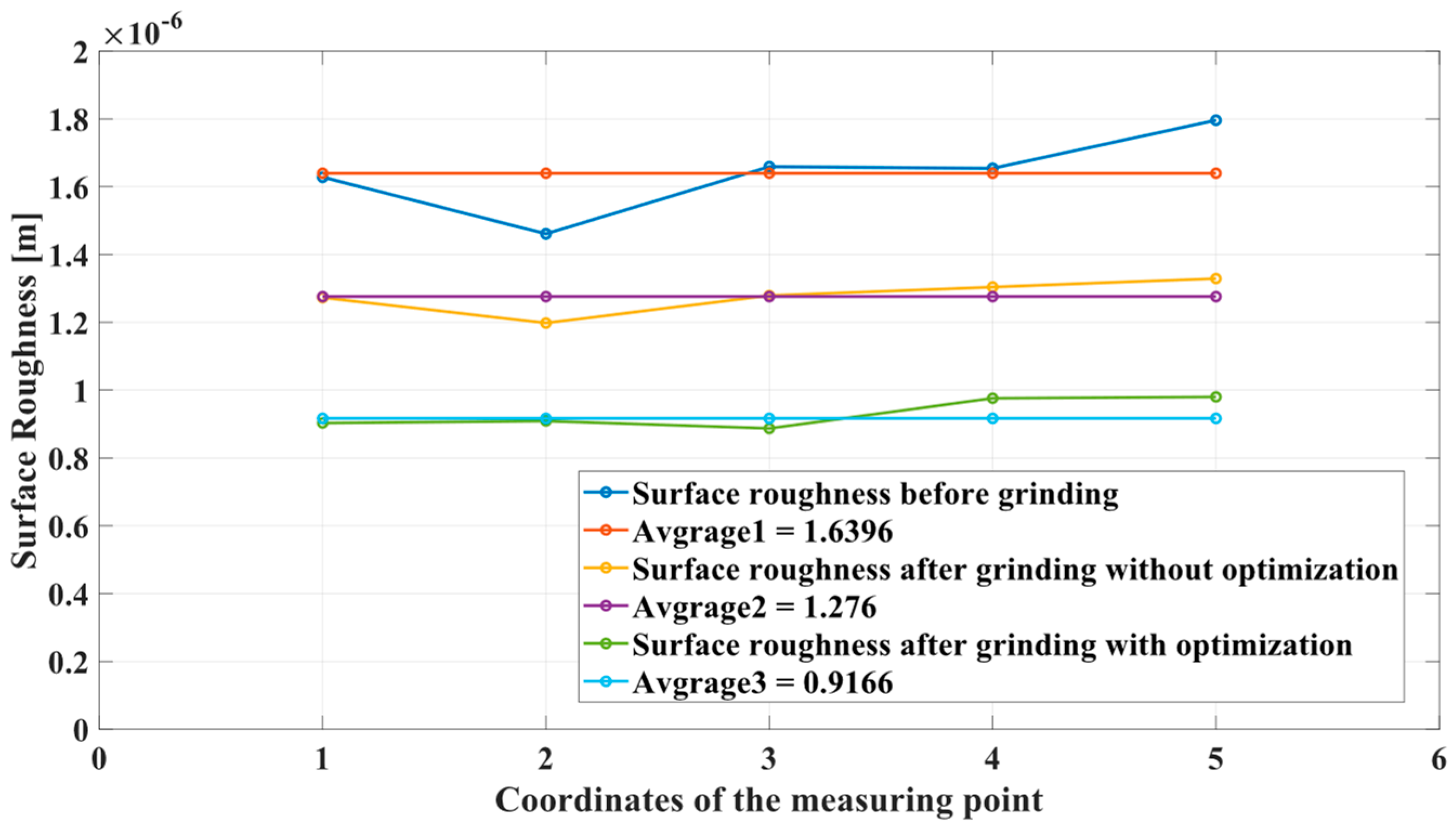
4.3. Optimal Robotic Grinding Trajectory Planning
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Pan, Y.; Yu, J.; Feng, H.; Dai, J.S. Velocity Index and Wading Height Based Design Method of Trajectory Parameters for a Coupled Parallelogram Legged Walking Robot. Mech. Mach. Theory 2024, 191, 105464. [Google Scholar] [CrossRef]
- Degrave, J.; Hermans, M.; Dambre, J.; Wyffels, F. A Differentiable Physics Engine for Deep Learning in Robotics. Front. Neurorobotics 2019, 13, 6. [Google Scholar] [CrossRef]
- Siekmann, J.; Green, K.; Warila, J.; Fern, A.; Hurst, J. Blind Bipedal Stair Traversal via Sim-to-Real Reinforcement Learning. arXiv 2021, arXiv:2105.08328. [Google Scholar]
- Machado, M.; Moreira, P.; Flores, P.; Lankarani, H.M. Compliant Contact Force Models in Multibody Dynamics: Evolution of the Hertz Contact Theory. Mech. Mach. Theory 2012, 53, 99–121. [Google Scholar] [CrossRef]
- Leine, R.; Acary, V.; Brüls, O. (Eds.) Advanced Topics in Nonsmooth Dynamics: Transactions of the European Network for Nonsmooth Dynamics; Springer International Publishing: Cham, Switzerland, 2018; ISBN 978-3-319-75971-5. [Google Scholar]
- Mazhar, H.; Heyn, T.; Negrut, D.; Tasora, A. Using Nesterov’s Method to Accelerate Multibody Dynamics with Friction and Contact. ACM Trans. Graph. 2015, 34, 1–14. [Google Scholar] [CrossRef]
- Heyn, T.; Anitescu, M.; Tasora, A.; Negrut, D. Using Krylov Subspace and Spectral Methods for Solving Complementarity Problems in Many-Body Contact Dynamics Simulation. Int. J. Numer. Meth. Eng. 2013, 95, 541–561. [Google Scholar] [CrossRef]
- Smith, R. Open Dynamics Engine. 2007. Available online: https://www.ode.org/ (accessed on 1 December 2023).
- Coumans, E.; Bai, Y. Pybullet, a Python Module for Physics Simulation for Games, Robotics and Machine Learning. Available online: https://pybullet.org/ (accessed on 1 December 2023).
- CM Labs Simulations Theory Guide: Vortex Software’s Multibody Dynamics Engine. Available online: https://www.cm-labs.com/en/simulation-solutions/vortex-training-simulators/hardware-features/ (accessed on 1 December 2023).
- Li, J.; Daviet, G.; Narain, R.; Bertails-Descoubes, F.; Overby, M.; Brown, G.E.; Boissieux, L. An Implicit Frictional Contact Solver for Adaptive Cloth Simulation. ACM Trans. Graph. 2018, 37, 1–15. [Google Scholar] [CrossRef]
- Hwangbo, J.; Lee, J.; Hutter, M. Per-Contact Iteration Method for Solving Contact Dynamics. IEEE Robot. Autom. Lett. 2018, 3, 895–902. [Google Scholar] [CrossRef]
- Castro, A.M.; Qu, A.; Kuppuswamy, N.; Alspach, A.; Sherman, M. A Transition-Aware Method for the Simulation of Compliant Contact With Regularized Friction. IEEE Robot. Autom. Lett. 2020, 5, 1859–1866. [Google Scholar] [CrossRef]
- Todorov, E.; Erez, T.; Tassa, Y. MuJoCo: A Physics Engine for Model-Based Control. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5026–5033. [Google Scholar]
- Kang, D.; Hwangho, J. SimBenchmark-Physics Engine Benchmark for Robotics Applications: RaiSim vs. Bullet vs. ODE vs. MuJoCo vs. DartSim. Available online: https://github.com/leggedrobotics/SimBenchmark (accessed on 1 December 2023).
- Lidec, Q.L.; Jallet, W.; Montaut, L.; Laptev, I.; Schmid, C.; Carpentier, J. Contact Models in Robotics: A Comparative Analysis. arXiv 2023, arXiv:2304.06372. [Google Scholar]
- Anitescu, M. Optimization-Based Simulation of Nonsmooth Rigid Multibody Dynamics. Math. Program. 2006, 105, 113–143. [Google Scholar] [CrossRef]
- Flores, P.; Machado, M.; Silva, M.T.; Martins, J.M. On the Continuous Contact Force Models for Soft Materials in Multibody Dynamics. Multibody Syst Dyn 2011, 25, 357–375. [Google Scholar] [CrossRef]
- Gonthier, Y.; McPhee, J.; Lange, C.; Piedbœuf, J.-C. A Regularized Contact Model with Asymmetric Damping and Dwell-Time Dependent Friction. Multibody Syst. Dyn. 2004, 11, 209–233. [Google Scholar] [CrossRef]
- Gummer, A.; Sauer, B. Modeling Planar Slider-Crank Mechanisms with Clearance Joints in RecurDyn. Multibody Syst. Dyn. 2014, 31, 127–145. [Google Scholar] [CrossRef]
- Shi, Y.; Rex, S.X.; Wang, X.; Hu, Z.; Newman, D.; Ding, W. Numerical Simulation and Field Tests of Minimum-Tillage Planter with Straw Smashing and Strip Laying Based on EDEM Software. Comput. Electron. Agric. 2019, 166, 105021. [Google Scholar] [CrossRef]
- Ryan, R.R. ADAMS—Multibody System Analysis Software. In Multibody Systems Handbook; Schiehlen, W., Ed.; Springer: Berlin/Heidelberg, Germnay, 1990; pp. 361–402. ISBN 978-3-642-50997-1. [Google Scholar]
- Erez, T.; Tassa, Y.; Todorov, E. Simulation Tools for Model-Based Robotics: Comparison of Bullet, Havok, MuJoCo, ODE and PhysX. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4397–4404. [Google Scholar]
- Kildashti, K.; Dong, K.; Yu, A. Contact Force Models for Non-Spherical Particles with Different Surface Properties: A Review. Powder Technol. 2023, 418, 118323. [Google Scholar] [CrossRef]
- Choi, J.; Ryu, H.S.; Kim, C.W.; Choi, J.H. An Efficient and Robust Contact Algorithm for a Compliant Contact Force Model between Bodies of Complex Geometry. Multibody Syst. Dyn. 2010, 23, 99–120. [Google Scholar] [CrossRef]
- Pan, J.; Chitta, S.; Manocha, D. FCL: A General Purpose Library for Collision and Proximity Queries. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 3859–3866. [Google Scholar]
- Zhou, Y.; Pan, Y.; Lei, T.; Chen, J. Robotic Simulator with High-Precision Perception of Contact Dynamics. In Proceedings of the 2023 IEEE International Conference on Development and Learning (ICDL), Macau, China, 9–11 November 2023; pp. 354–360. [Google Scholar]
- Flores, P.; Lankarani, H.M. Contact Force Models for Multibody Dynamics; Solid Mechanics and Its Applications; Springer International Publishing: Cham, Switzerland, 2016; Volume 226, ISBN 978-3-319-30896-8. [Google Scholar]
- Goldsmith, W. Impact: The Theory and Physical Behaviour of Colliding Solids; E. Arnold: London, UK, 1960. [Google Scholar]
- Rodrigues Da Silva, M.; Marques, F.; Tavares Da Silva, M.; Flores, P. A Compendium of Contact Force Models Inspired by Hunt and Crossley’s Cornerstone Work. Mech. Mach. Theory 2022, 167, 104501. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, M.; Zhao, L.; Zhao, Q.; Liang, X.; He, G. A Continuous Contact Force Model for the Impact Analysis of Hard and Soft Materials. Mech. Mach. Theory 2022, 177, 105065. [Google Scholar] [CrossRef]
- Polyanin, A.D.; Zaitsev, V.F. Handbook of Exact Solutions for Ordinary Differential Equations, 2nd ed.; Chapman & Hall/CRC: Boca Raton, FL, USA, 2003; ISBN 978-1-58488-297-8. [Google Scholar]
- Michel, L.; Ghanes, M.; Plestan, F.; Aoustin, Y.; Barbot, J.-P. Semi-Implicit Homogeneous Euler Differentiator for a Second-Order System: Validation on Real Data. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 13–15 December 2021; pp. 5911–5917. [Google Scholar]
- Hongpan, N.; Yong, G.; Zhongming, H. Application Research of PhysX Engine in Virtual Environment. In Proceedings of the 2010 International Conference on Audio, Language and Image Processing, Shanghai, China, 23–25 November 2010; pp. 587–591. [Google Scholar]
- Chang, H.-C.; Wang, J.-J.J. A Stochastic Grinding Force Model Considering Random Grit Distribution. Int. J. Mach. Tools Manuf. 2008, 48, 1335–1344. [Google Scholar] [CrossRef]
- Open CASCADE Technology: Introduction. Available online: https://dev.opencascade.org/doc/overview/html/index.html (accessed on 28 January 2024).
- Yang, P. Py0330/Aris. Available online: https://github.com/py0330/aris (accessed on 28 January 2024).
- Tang, J.; Du, J.; Chen, Y. Modeling and Experimental Study of Grinding Forces in Surface Grinding. J. Mater. Process. Technol. 2009, 209, 2847–2854. [Google Scholar] [CrossRef]
- Zhao, H.; Wen, K.; Lei, T.; Xiao, Y.; Pan, Y. Automatic Aluminum Alloy Surface Grinding Trajectory Planning of Industrial Robot Based on Weld Seam Recognition and Positioning. Actuators 2023, 12, 170. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Pan, Y.; Chen, J.; Lei, T. Variable Time-Step Physics Engine with Continuous Compliance Contact Model for Optimal Robotic Grinding Trajectory Planning. Sensors 2024, 24, 1415. https://doi.org/10.3390/s24051415
Zhou Y, Pan Y, Chen J, Lei T. Variable Time-Step Physics Engine with Continuous Compliance Contact Model for Optimal Robotic Grinding Trajectory Planning. Sensors. 2024; 24(5):1415. https://doi.org/10.3390/s24051415
Chicago/Turabian StyleZhou, Yongcan, Yang Pan, Junpeng Chen, and Tianjian Lei. 2024. "Variable Time-Step Physics Engine with Continuous Compliance Contact Model for Optimal Robotic Grinding Trajectory Planning" Sensors 24, no. 5: 1415. https://doi.org/10.3390/s24051415
APA StyleZhou, Y., Pan, Y., Chen, J., & Lei, T. (2024). Variable Time-Step Physics Engine with Continuous Compliance Contact Model for Optimal Robotic Grinding Trajectory Planning. Sensors, 24(5), 1415. https://doi.org/10.3390/s24051415