
Ultra-Wideband Ranging Error Mitigation with Novel Channel Impulse Response Feature Parameters and Two-Step Non-Line-of-Sight Identification



Abstract
:1. Introduction
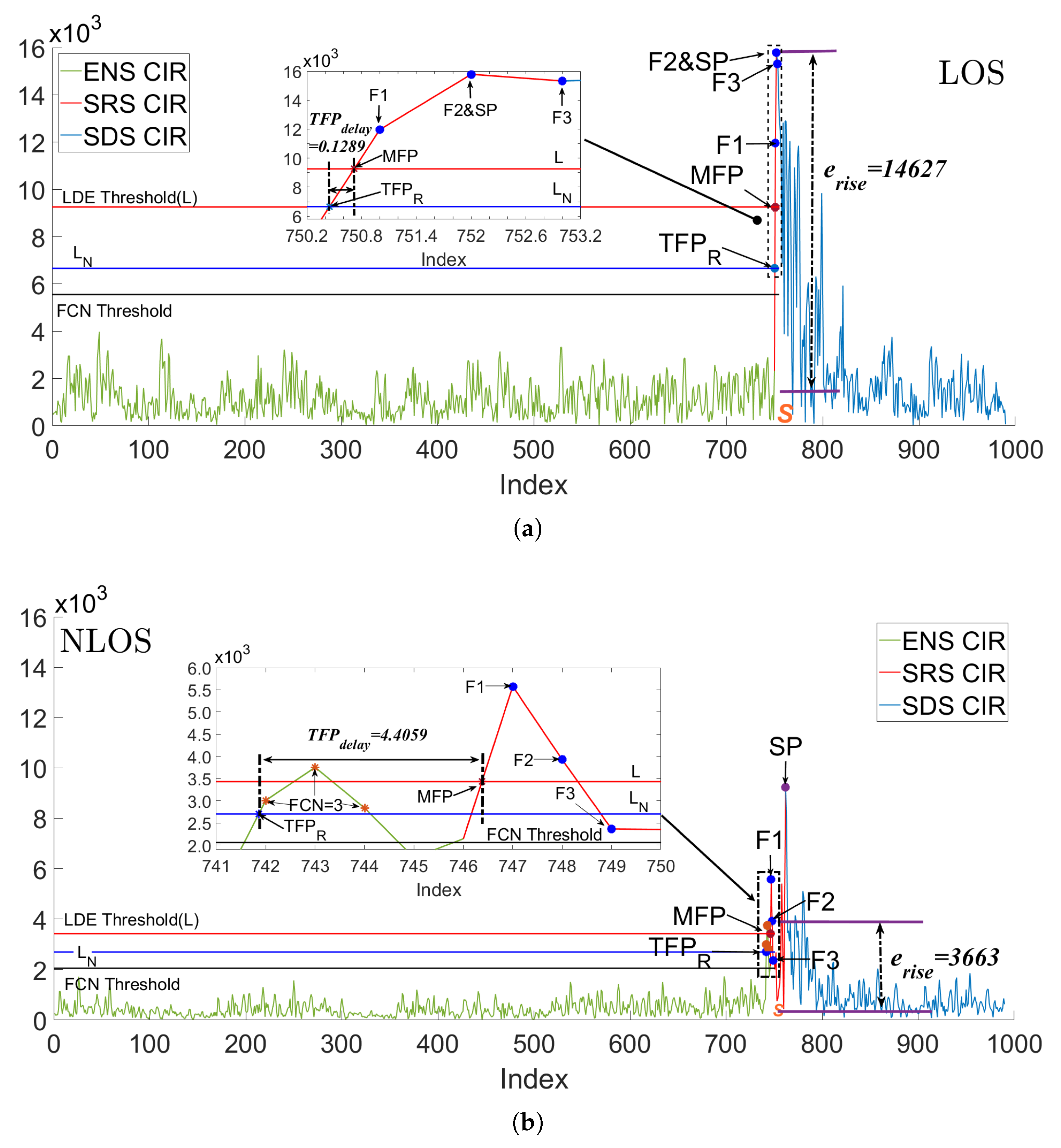
- We divide the entire process of UWB signal collection into three stages based on the CIR fluctuation trend caused by UWB signal arrival: the environmental noise stage, CIR steep rise stage, and CIR slow descent stage. To the best of our knowledge, this innovative classification is the first to be utilized for both UWB NLOS identification and ranging error mitigation. Leveraging the unique characteristics of these stages, we optimize existing CIR features and propose two new CIR features from key nodes—TFP delay and energy rise—which have much stronger feature representation and robustness and are first used to cover the leading edge detection algorithm for UWB signal identification.
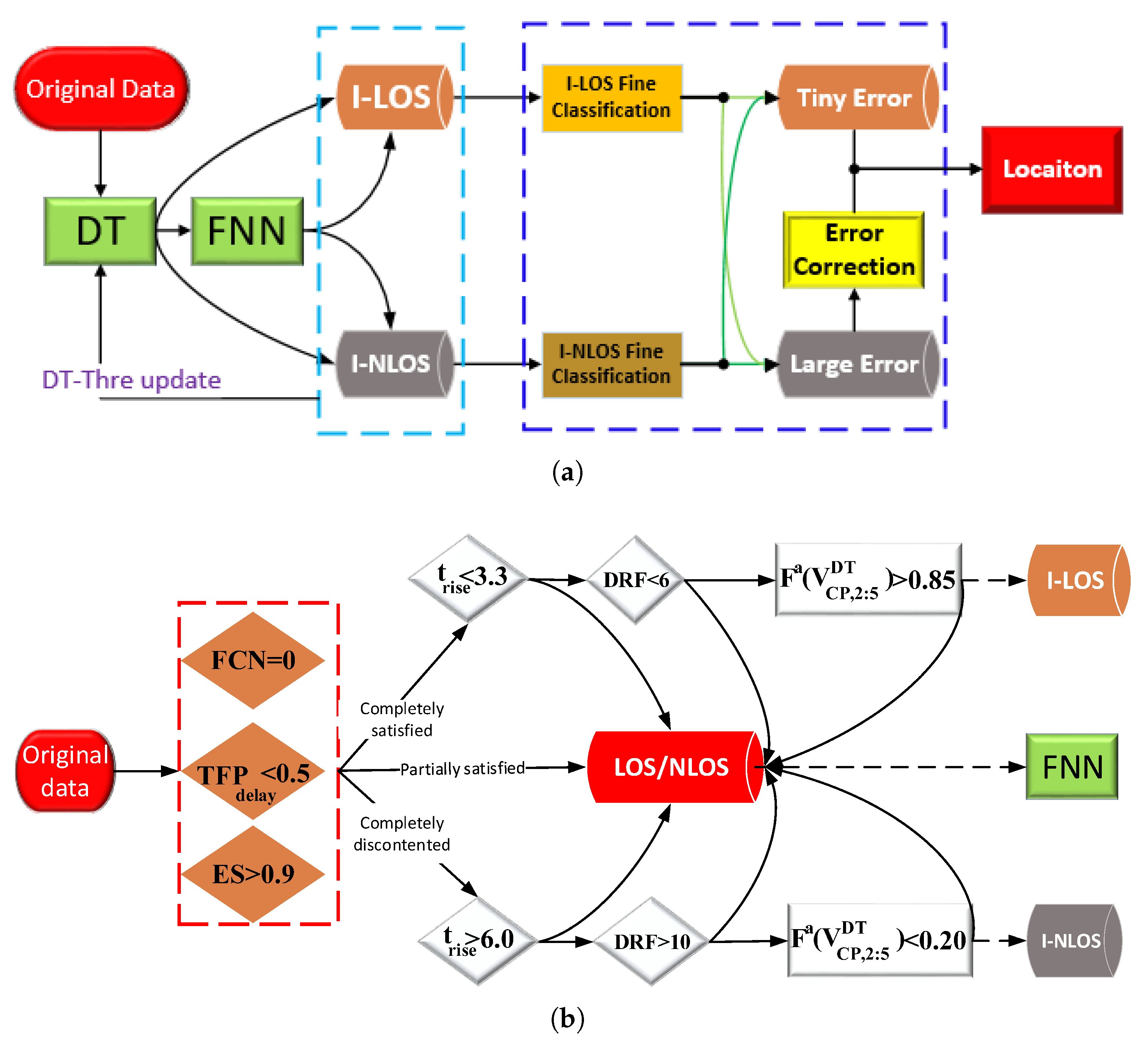
- For channel identification, we propose a two-step NLOS identification algorithm that leverages a decision tree (DT) to pre-extract typical LOS and NLOS data and then uses the feedforward neural network (FNN) to fine-tune the remaining data. Moreover, we introduce fuzzy logic, i.e., the probability of a CIR feature being identified as LOS, to extract the potential information, ensure the accuracy of the DT, and optimize the initial state of the FNN. To bolster the robustness of our algorithms, we adopt a dynamic update policy for the DT threshold, which is based on the final identification results.
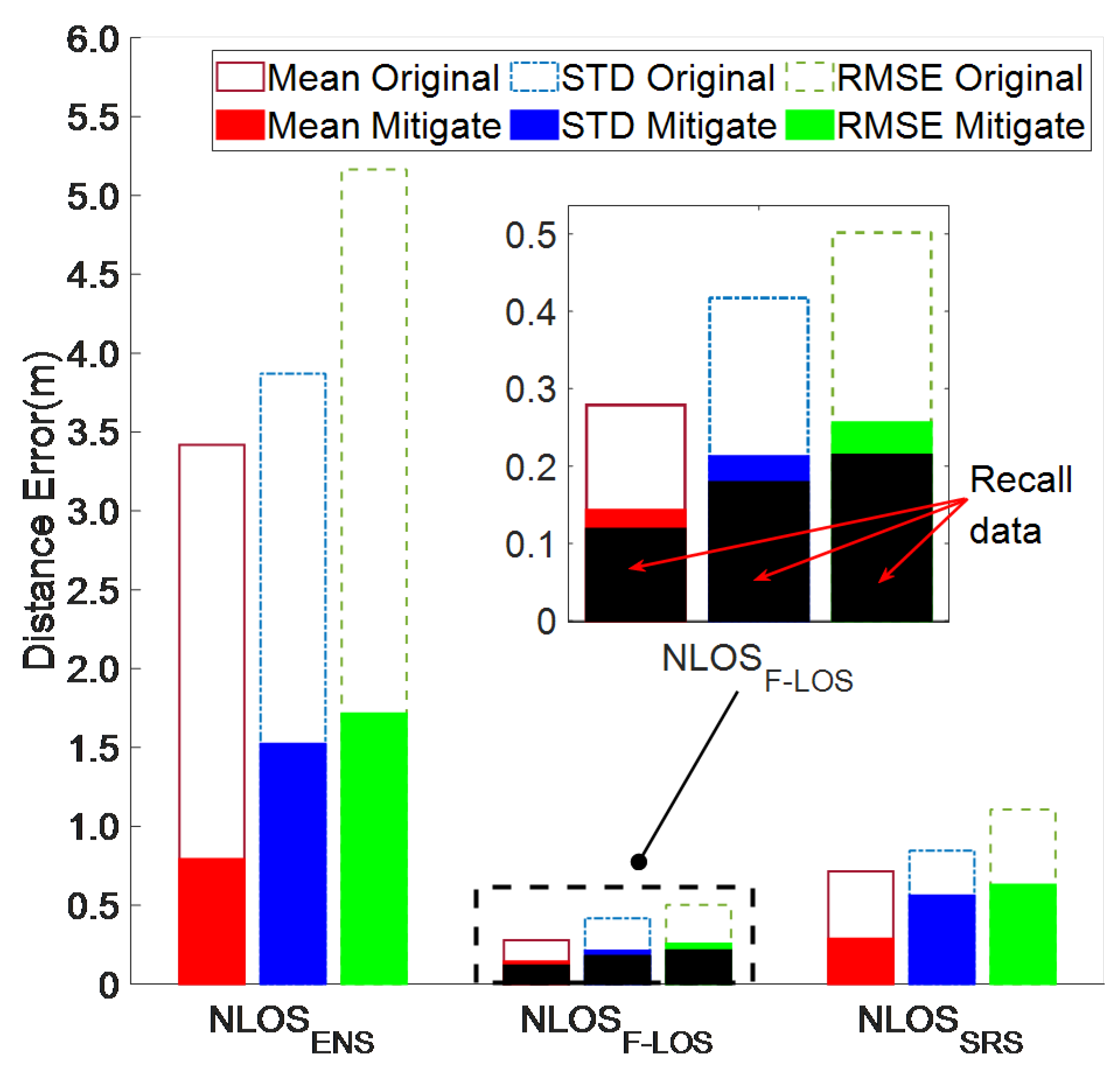
- For ranging error mitigation, we propose a novel method of categorizing NLOS ranging errors into three types based on the underlying causes of the errors and their waveform characteristics. For each type of NLOS ranging error, we take first-path (FP) detection as the core to optimize the corresponding correction strategy. To fully leverage the capabilities of the UWB signal system, this study implements a recall mechanism designed to extract high-precision ranging results. Furthermore, this paper classifies and partially mitigates LOS ranging errors to further reduce the dependence of positioning performance on the accuracy of NLOS identification. Finally, we validate the performance of the newly proposed features and algorithms, as well as their enhancement in dynamic positioning accuracy, through a series of experimental activities across multiple scenarios.
2. Related Works
2.1. UWB NLOS Identification
2.2. NLOS Ranging Suppression
3. Theoretical Framework
3.1. UWB Channel CIR Feature Extraction
- (1)
- TFP delay ()
- (2)
- Energy Rise ()
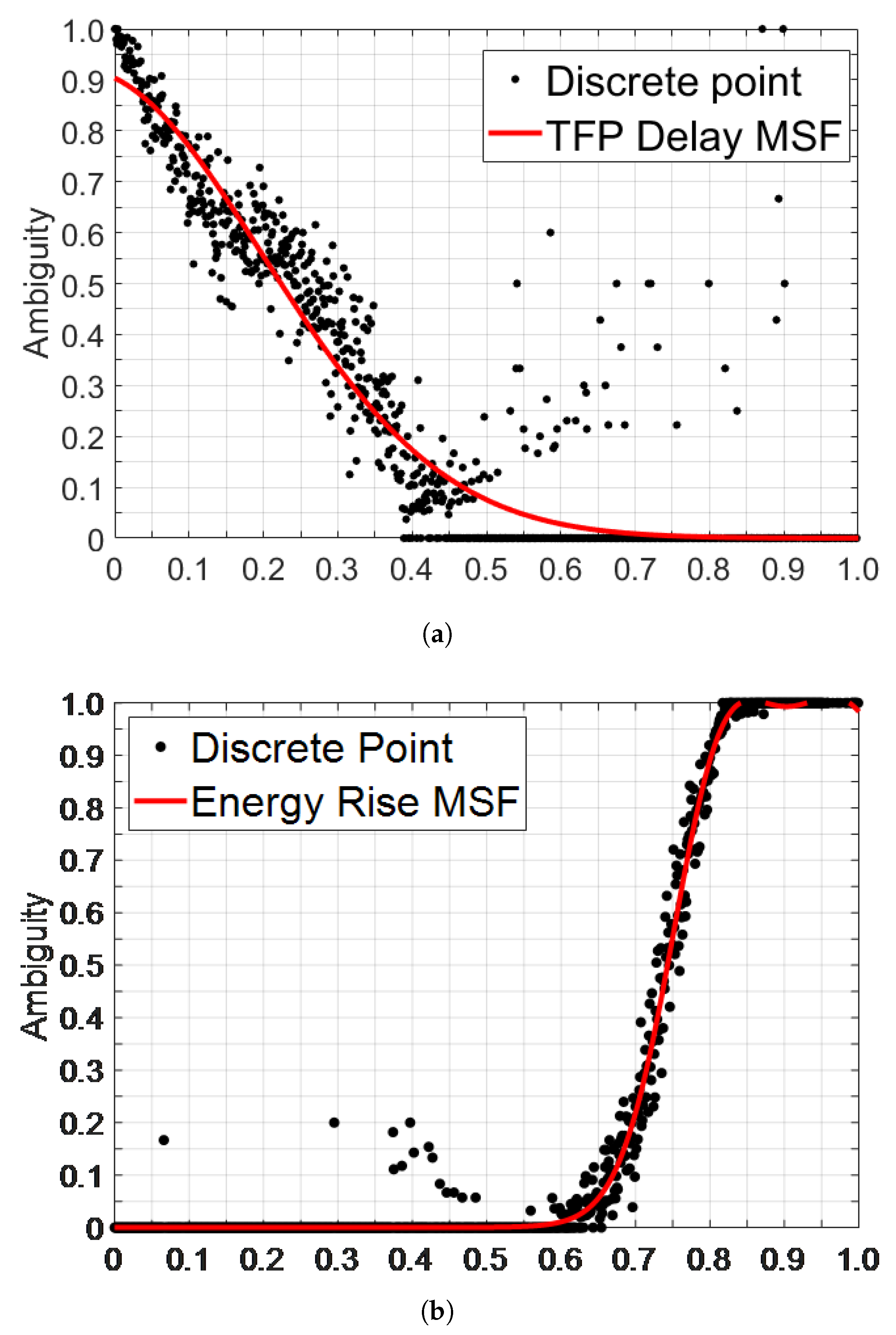
3.2. Fuzzy Credibility Evaluation
4. Proposed Method
4.1. Channel State Identification Algorithm
- (1)
- Step 1: Decision tree for pre-extraction
- (2)
- Step 2: FNN for identification of remaining data
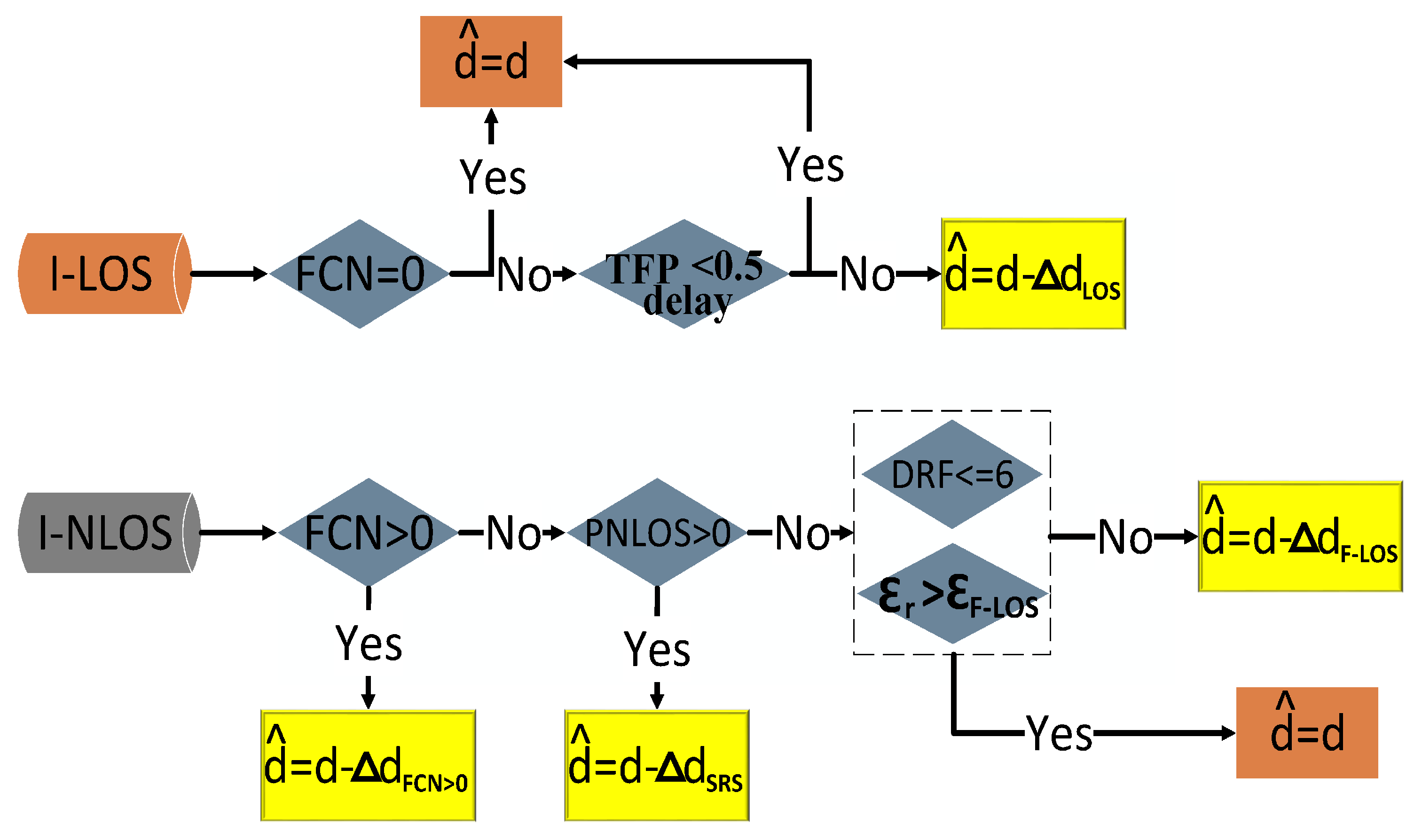
4.2. Classification and Correction of Ranging Errors
- (1)
- I-LOS Ranging Errors
- (2)
- I-NLOS Ranging Errors
- (i)
- (ii)
- (iii)
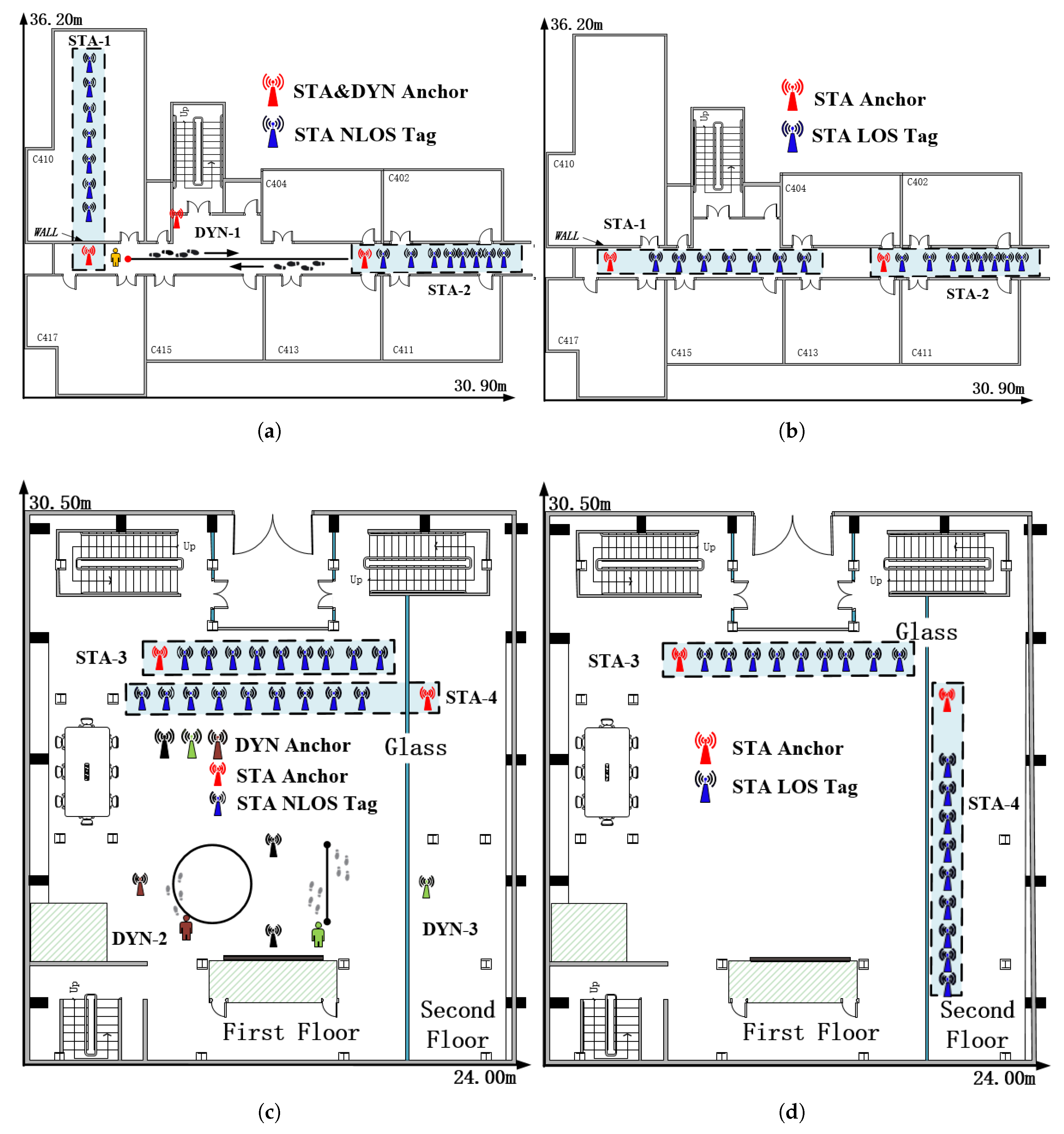
5. Experiments
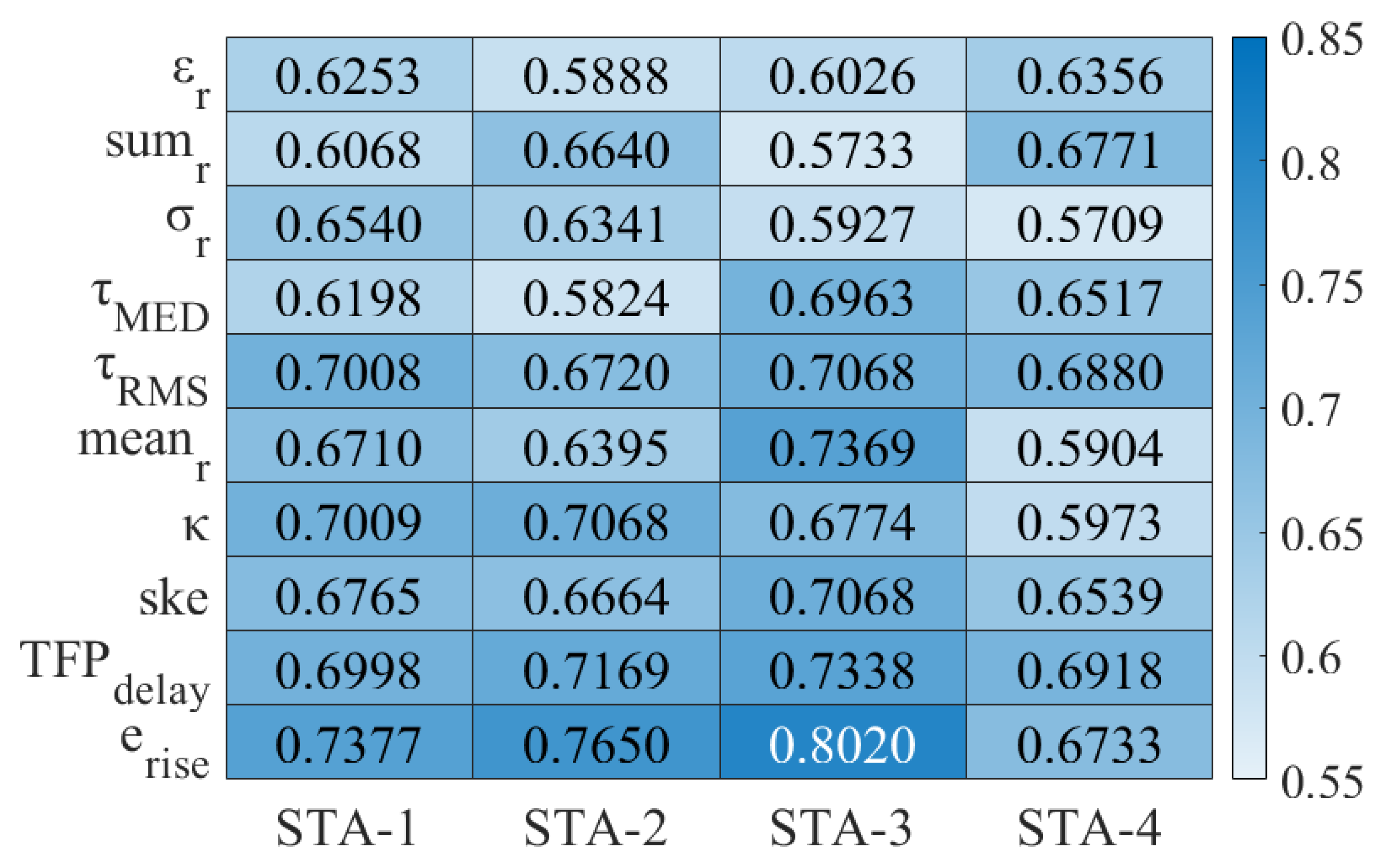
5.1. LOS/NLOS Identification Performance
- (i)
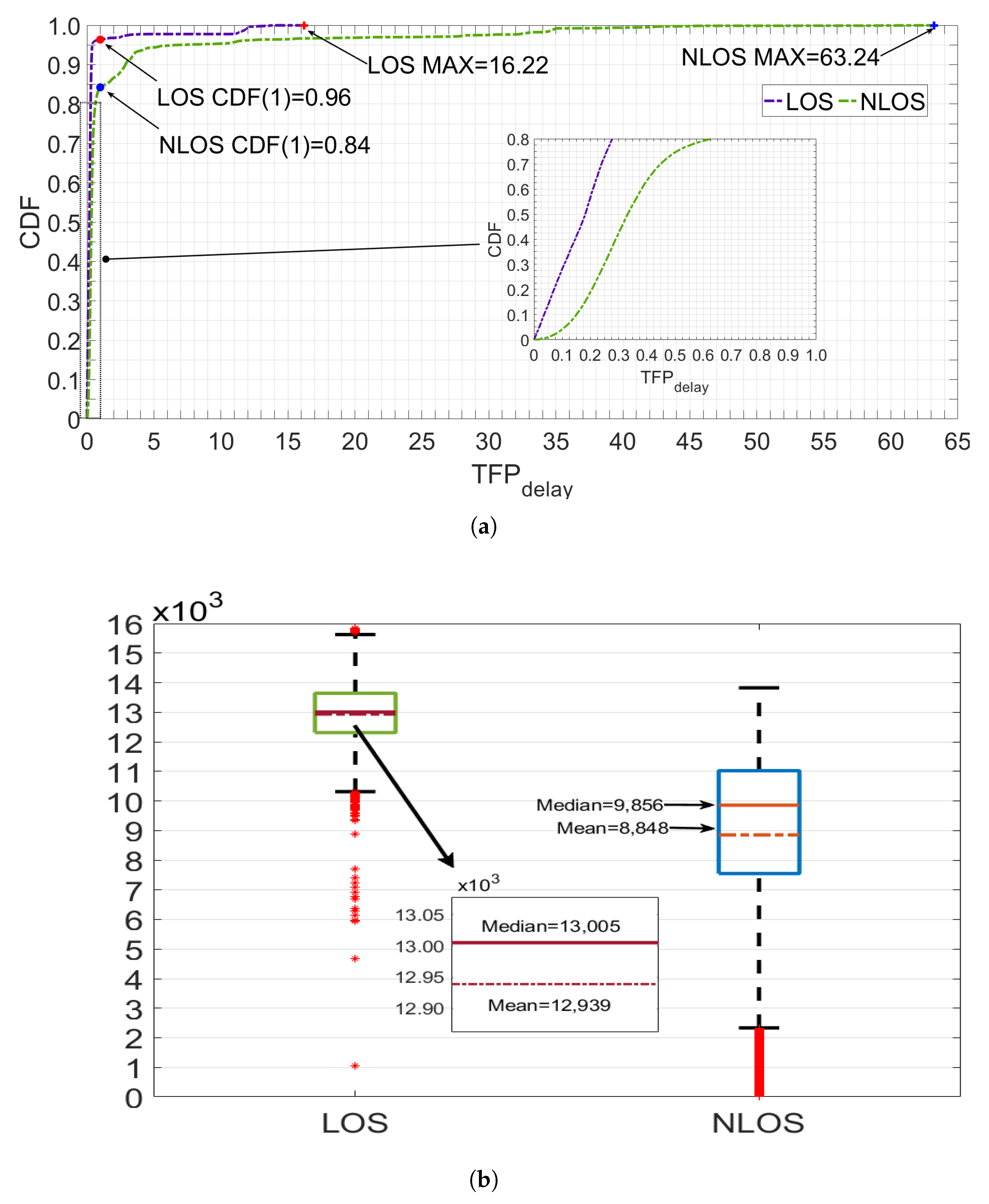
- The New CIR Features and Optimization of the Existing CIR Features
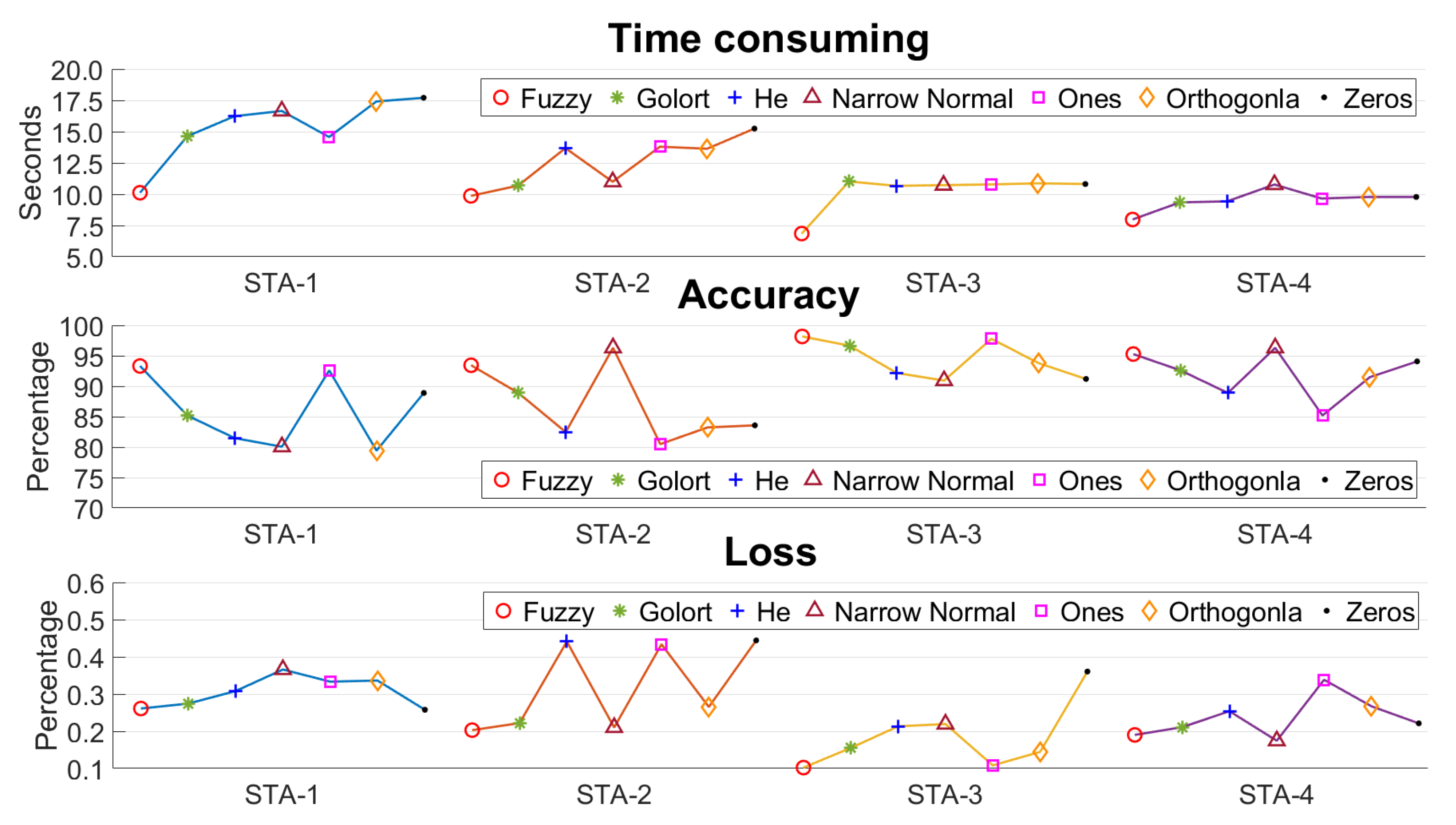
- (ii)
- Two-Step Channel Identification Algorithm
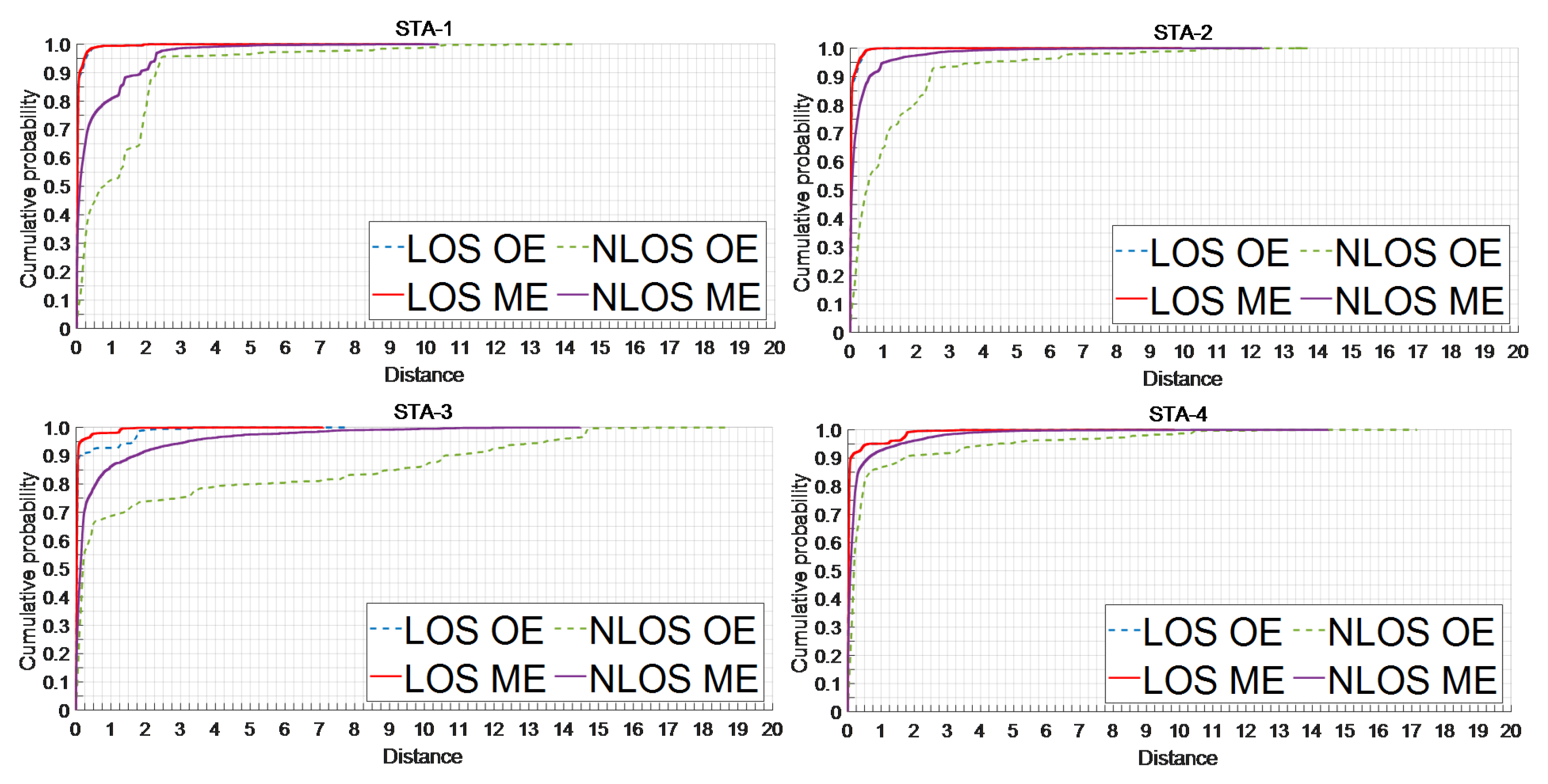
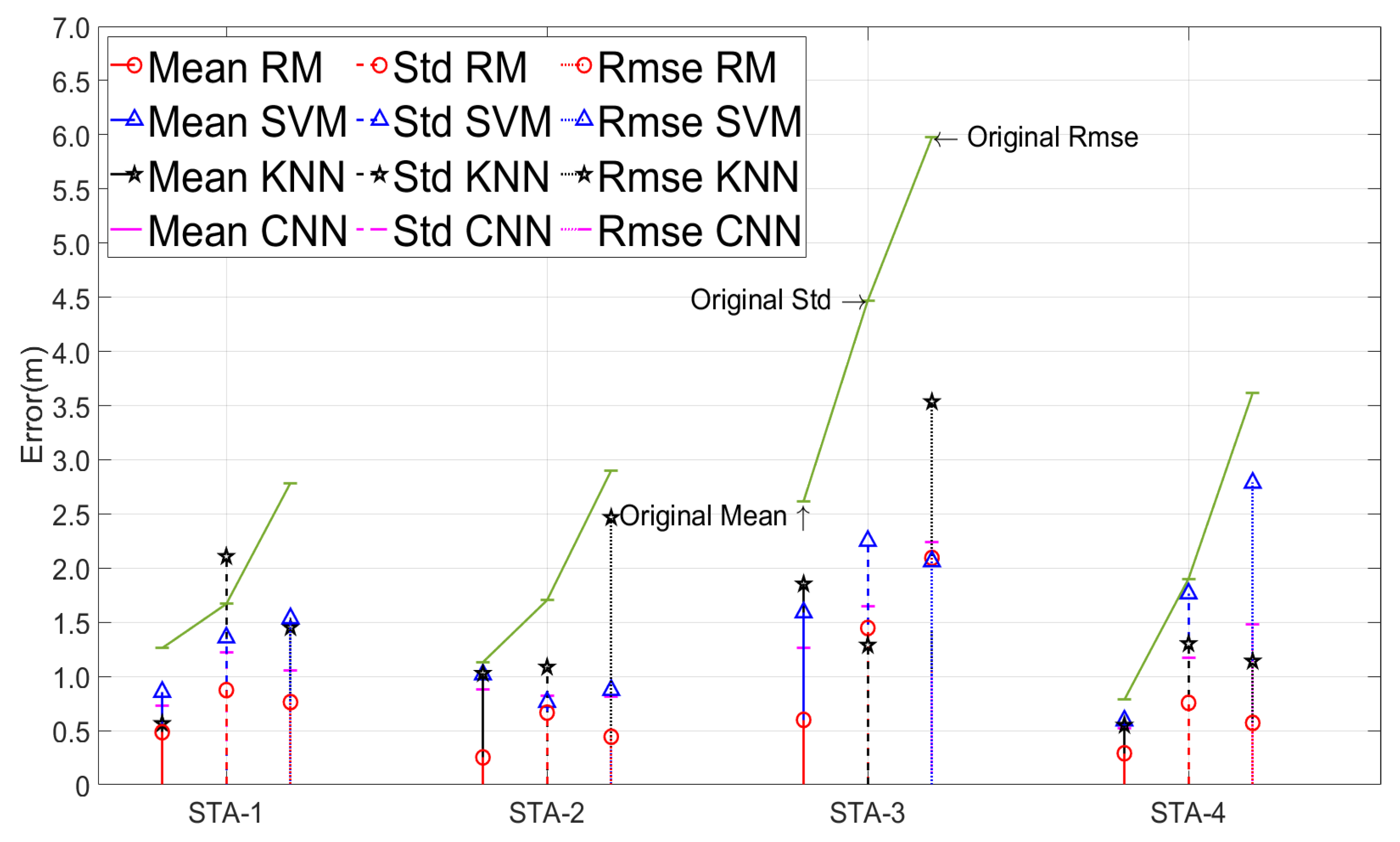
5.2. Ranging Error Mitigation Evaluation
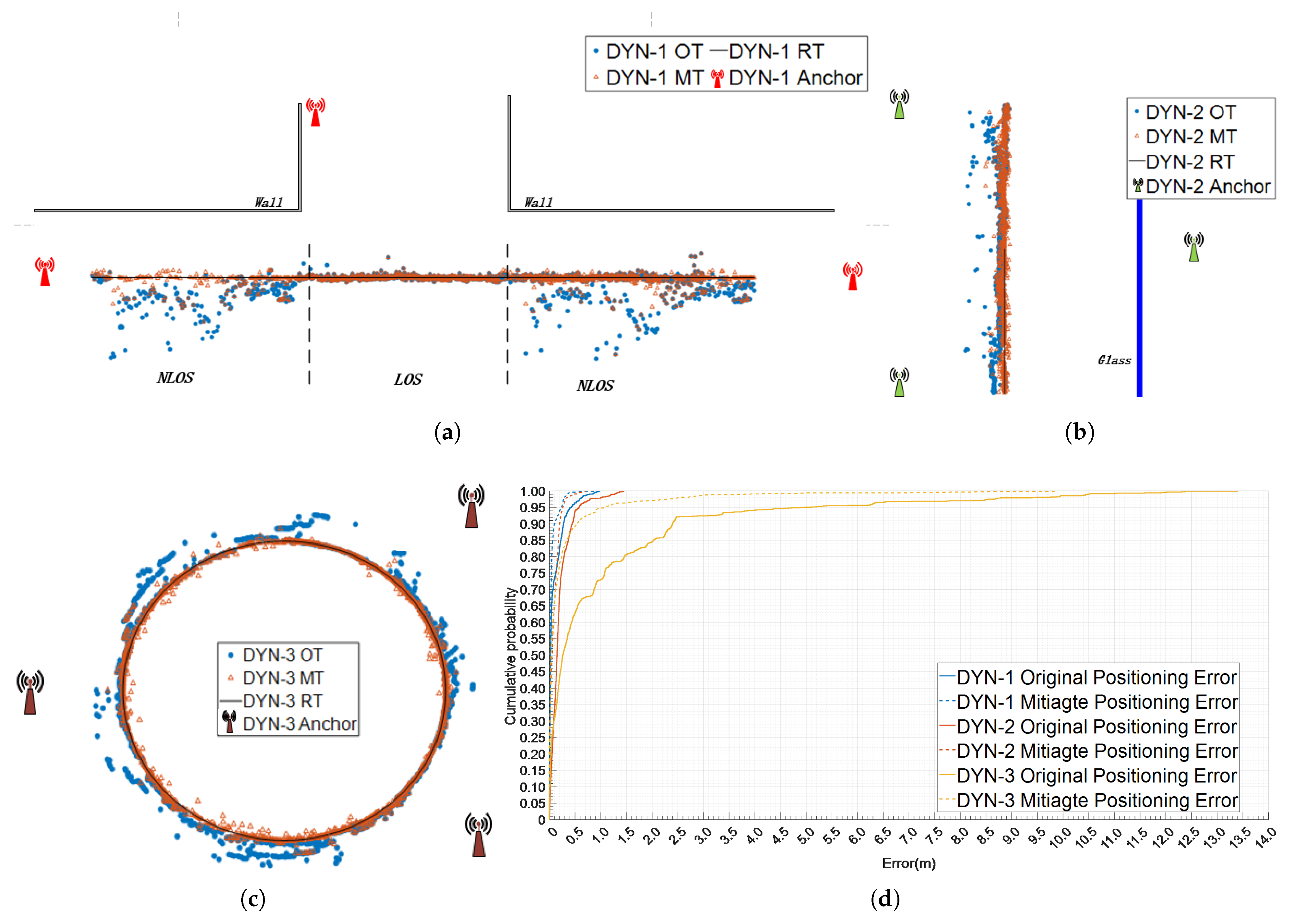
5.3. Positioning Experiment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Elsheikh, M.; Iqbal, U.; Noureldin, A.; Korenberg, M. The Implementation of Precise Point Positioning (PPP): A Comprehensive Review. Sensors 2023, 23, 8874. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Shi, K. Few-Shot Learning for WiFi Fingerprinting Indoor Positioning. Sensors 2023, 23, 8458. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Nguyen, K.A.; Luo, Z. Wifi access points line-of-sight detection for indoor positioning using the signal round trip time. Remote Sens. 2022, 14, 6052. [Google Scholar] [CrossRef]
- Verde, D.; Romero, L.; Faria, P.M.; Paiva, S. Indoor Content Delivery Solution for a Museum Based on BLE Beacons. Sensors 2023, 23, 7403. [Google Scholar] [CrossRef]
- Li, J.; Sun, L.; Liu, D.; Yu, R.; Wang, X. An Algorithm with Iteration Uncertainty Eliminate Based on Geomagnetic Fingerprint under Mobile Edge Computing for Indoor Localization. Sensors 2022, 22, 9032. [Google Scholar] [CrossRef] [PubMed]
- Che, F.; Ahmed, Q.Z.; Lazaridis, P.I.; Sureephong, P.; Alade, T. Indoor Positioning System (IPS) Using Ultra-Wide Bandwidth (UWB) mdash;For Industrial Internet of Things (IIoT). Sensors 2023, 23, 5710. [Google Scholar] [CrossRef]
- Zhu, F.; Yu, K.; Lin, Y.; Wang, C.; Wang, J.; Chao, M. Robust LOS/NLOS Identification for UWB Signals Using Improved Fuzzy Decision Tree Under Volatile Indoor Conditions. IEEE Trans. Instrum. Meas. 2023, 72, 1–11. [Google Scholar] [CrossRef]
- Gan, X.; Yu, B.; Huang, L.; Jia, R.; Zhang, H.; Sheng, C.; Fan, G.; Wang, B. Doppler differential positioning technology using the BDS/GPS indoor array pseudolite system. Sensors 2019, 19, 4580. [Google Scholar] [CrossRef]
- Zheng, Y.; Sheng, M.; Liu, J.; Li, J. Exploiting AoA Estimation Accuracy for Indoor Localization: A Weighted AoA-Based Approach. IEEE Wirel. Commun. Lett. 2019, 8, 65–68. [Google Scholar] [CrossRef]
- Kelly, D.; Reinhardt, S.; Stanley, R.; Einhorn, M. PulsON second generation timing chip: Enabling UWB through precise timing. In Proceedings of the 2002 IEEE Conference on Ultra Wideband Systems and Technologies (IEEE Cat. No. 02EX580), Baltimore, MD, USA, 21–23 May 2002; IEEE: Piscataway, NJ, USA, 2002; pp. 117–121. [Google Scholar]
- Michel, L.; Hentenryck, P.V. Localizer. Constraints 2000, 5, 43–84. [Google Scholar] [CrossRef]
- Xu, J.; Ma, M.; Law, C.L. AOA cooperative position localization. In Proceedings of the IEEE GLOBECOM 2008-2008 IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–5. [Google Scholar]
- Ferreira, A.G.; Fernandes, D.; Branco, S.; Catarino, A.P.; Monteiro, J.L. Feature Selection for Real-Time NLOS Identification and Mitigation for Body-Mounted UWB Transceivers. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Kim, D.H.; Farhad, A.; Pyun, J.Y. UWB Positioning System Based on LSTM Classification with Mitigated NLOS Effects. IEEE Internet Things J. 2022, 10, 1822–1835. [Google Scholar] [CrossRef]
- Güvenç, İ.; Chong, C.C.; Watanabe, F.; Inamura, H. NLOS identification and weighted least-squares localization for UWB systems using multipath channel statistics. EURASIP J. Adv. Signal Process. 2007, 2008, 271984. [Google Scholar] [CrossRef]
- Schroeder, J.; Galler, S.; Kyamakya, K.; Jobmann, K. NLOS detection algorithms for ultra-wideband localization. In Proceedings of the 2007 4th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 22–22 March 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 159–166. [Google Scholar]
- Borras, J.; Hatrack, P.; Mandayam, N.B. Decision theoretic framework for NLOS identification. In Proceedings of the VTC’98, 48th IEEE Vehicular Technology Conference. Pathway to Global Wireless Revolution (Cat. No. 98CH36151), Ottawa, ON, Canada, 21 May 1998; IEEE: Piscataway, NJ, USA, 1998; Volume 2, pp. 1583–1587. [Google Scholar]
- Chen, P.C. A non-line-of-sight error mitigation algorithm in location estimation. In Proceedings of the WCNC, 1999 IEEE Wireless Communications and Networking Conference (Cat. No. 99TH8466), New Orleans, LA, USA, 21–24 September 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 1, pp. 316–320. [Google Scholar]
- Jiao, L.; Xing, J.; Zhang, X.; Zhang, J.; Zhao, C. LCC-Rwgh: A NLOS error mitigation algorithm for localization in wireless sensor network. In Proceedings of the 2007 IEEE International Conference on Control and Automation, Guangzhou, China, 30 May–1 June 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1354–1359. [Google Scholar]
- Zihajehzadeh, S.; Yoon, P.K.; Kang, B.S.; Park, E.J. UWB-Aided Inertial Motion Capture for Lower Body 3-D Dynamic Activity and Trajectory Tracking. IEEE Trans. Instrum. Meas. 2015, 64, 3577–3587. [Google Scholar] [CrossRef]
- Marano, S.; Gifford, W.M.; Wymeersch, H.; Win, M.Z. NLOS identification and mitigation for localization based on UWB experimental data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar] [CrossRef]
- Kolakowski, M.; Modelski, J. Detection of direct path component absence in NLOS UWB channel. In Proceedings of the 2018 22nd International Microwave and Radar Conference (MIKON), Poznan, Poland, 14–17 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 247–250. [Google Scholar]
- Cwalina, K.K.; Rajchowski, P.; Blaszkiewicz, O.; Olejniczak, A.; Sadowski, J. Deep learning-based LOS and NLOS identification in wireless body area networks. Sensors 2019, 19, 4229. [Google Scholar] [CrossRef] [PubMed]
- Stahlke, M.; Kram, S.; Mutschler, C.; Mahr, T. NLOS detection using UWB channel impulse responses and convolutional neural networks. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Wang, F.; Xu, Z.; Zhi, R.; Chen, J.; Zhang, P. Los/nlos channel identification technology based on cnn. In Proceedings of the 2019 6th NAFOSTED Conference on Information and Computer Science (NICS), Hanoi, Vietnam, 12–13 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 200–203. [Google Scholar]
- Jiang, C.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. An UWB channel impulse response de-noising method for NLOS/LOS classification boosting. IEEE Commun. Lett. 2020, 24, 2513–2517. [Google Scholar] [CrossRef]
- Silva, B.; Hancke, G.P. IR-UWB-based non-line-of-sight identification in harsh environments: Principles and challenges. IEEE Trans. Ind. Inform. 2016, 12, 1188–1195. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C.C.; Watanabe, F. NLOS identification and mitigation for UWB localization systems. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1571–1576. [Google Scholar]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A novel NLOS mitigation algorithm for UWB localization in harsh indoor environments. IEEE Trans. Veh. Technol. 2018, 68, 686–699. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhao, D.; Zuo, S.; Zhang, T.; Ma, D. A low complexity NLOS error mitigation method in UWB localization. In Proceedings of the 2015 IEEE/CIC International Conference on Communications in China (ICCC), Shenzhen, China, 2–4 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Venkatesh, S.; Buehrer, R.M. NLOS mitigation using linear programming in ultrawideband location-aware networks. IEEE Trans. Veh. Technol. 2007, 56, 3182–3198. [Google Scholar] [CrossRef]
- Yao, L.; Wu, Y.W.A.; Yao, L.; Liao, Z.Z. An integrated IMU and UWB sensor based indoor positioning system. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–8. [Google Scholar]
- Zeng, Q.; Liu, D.; Lv, C. UWB/binocular VO fusion algorithm based on adaptive kalman filter. Sensors 2019, 19, 4044. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Zeng, Q.; Lv, C.; Yu, H.; Ou, B. Mobile Robot Integrated Navigation Algorithm Based on Template Matching VO/IMU/UWB. IEEE Sens. J. 2021, 21, 27957–27966. [Google Scholar] [CrossRef]
- Wu, S.; Ma, Y.; Zhang, Q.; Zhang, N. NLOS error mitigation for UWB ranging in dense multipath environments. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1565–1570. [Google Scholar]
- Heidari, M.; Pahlavan, K. Identification of the absence of direct path in toa-based indoor localization systems. Int. J. Wirel. Inf. Netw. 2008, 15, 117–127. [Google Scholar] [CrossRef]
- Wang, S.; Mao, G.; Zhang, J.A. Joint time-of-arrival estimation for coherent UWB ranging in multipath environment with multi-user interference. IEEE Trans. Signal Process. 2019, 67, 3743–3755. [Google Scholar] [CrossRef]
- Kim, D.H.; Pyun, J.Y. NLOS identification based UWB and PDR hybrid positioning system. IEEE Access 2021, 9, 102917–102929. [Google Scholar] [CrossRef]
- Yang, B.; Li, J.; Zhang, H. Resilient Indoor Localization System Based on UWB and Visual—Inertial Sensors for Complex Environments. IEEE Trans. Instrum. Meas. 2021, 70, 1–14. [Google Scholar] [CrossRef]
- Jiang, C.; Shen, J.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. UWB NLOS/LOS classification using deep learning method. IEEE Commun. Lett. 2020, 24, 2226–2230. [Google Scholar] [CrossRef]
- Han, K.; Xing, H.; Deng, Z.; Du, Y. A RSSI/PDR-based probabilistic position selection algorithm with NLOS identification for indoor localisation. ISPRS Int. J. Geo-Inf. 2018, 7, 232. [Google Scholar] [CrossRef]
- Saeed, R.A.; Khatun, S.; Ali, B.M.; Khazani, M.A. Ultra-wideband (UWB) geolocation in NLOS multipath fading environments. In Proceedings of the 2005 13th IEEE International Conference on Networks Jointly Held with the 2005 IEEE 7th Malaysia International Conf on Communic, Kuala Lumpur, Malaysia, 16–18 November 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 2, p. 6. [Google Scholar]
- Song, X.; Wang, X. An uwb cyclostationary detection algorithm based on nonparametric cusum. In Proceedings of the Innovative Mobile and Internet Services in Ubiquitous Computing: Proceedings of the 14th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS-2020), Lodz, Poland, 1–3 July 2020; Springer: Cham, Switzerland, 2021; pp. 94–103. [Google Scholar]
- Li, F.; Xie, W.; Wang, J.; Liu, S. A new two-step ranging algorithm in NLOS environment for UWB systems. In Proceedings of the 2006 Asia-Pacific Conference on Communications, Busan, Republic of Korea, 31 August–1 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1–5. [Google Scholar]
- Bocus, M.; Piechocki, R.; Chetty, K. A Comparison of UWB CIR and WiFi CSI for Human Activity Recognition. In Proceedings of the IEEE Radar Conference (RadarCon), Virtual, 10–14 May 2021. [Google Scholar]
- Corbalán, P.; Picco, G.P. Ultra-wideband concurrent ranging. ACM Trans. Sens. Netw. (TOSN) 2020, 16, 1–41. [Google Scholar] [CrossRef]
- Kuhn, M.J.; Turnmire, J.; Mahfouz, M.R.; Fathy, A.E. Adaptive leading-edge detection in UWB indoor localization. In Proceedings of the 2010 IEEE Radio and Wireless Symposium (RWS), New Orleans, LA, USA, 10–14 January 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 268–271. [Google Scholar]
- Decawave Ltd. DW1000 User Manual. 2015. Available online: https://www.decawave.com/sites/default/files/resources/dw1000_user_manual_2.11.pdf (accessed on 7 October 2019).
- Klir, G.; Yuan, B. Fuzzy Sets and Fuzzy Logic; Prentice Hall: Hoboken, NJ, USA, 1995; Volume 4. [Google Scholar]
- Zimmermann, H.J. Fuzzy Set Theory—And Its Applications; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Yang, H.; Wang, Y.; Seow, C.K.; Sun, M.; Si, M.; Huang, L. UWB Sensor-Based Indoor LOS/NLOS Localization with Support Vector Machine Learning. IEEE Sens. J. 2023, 23, 2988–3004. [Google Scholar] [CrossRef]
- Decawave Ltd. Application Note DW1000 Metrics for Estimation of Non Line of Sight Operating Conditions. 2018. Available online: https://www.qorvo.com/products/p/DW1000#documents (accessed on 8 August 2018).
- Olejniczak, A.; Blaszkiewicz, O.; Cwalina, K.K.; Rajchowski, P.; Sadowski, J. Deep Learning Approach for LOS and NLOS Identification in the Indoor Environment. In Proceedings of the 2020 Baltic URSI Symposium (URSI), Warsaw, Poland, 5–8 October 2020; pp. 104–107. [Google Scholar] [CrossRef]
- Baldi, P.; Vershynin, R. The capacity of feedforward neural networks. Neural Netw. 2019, 116, 288–311. [Google Scholar] [CrossRef] [PubMed]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- IEEE 802.15.4-2011; IEEE Standard for Local and Metropolitan Area Networks—Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs). IEEE Standards Association: Piscataway, NJ, USA, 2011.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean | Median | 25% | 75% | |
|---|---|---|---|---|
| LOS | 12,939 | 13,005 | 12,308 | 13,639 |
| NLOS | 8848 | 8848 | 7544 | 11,021 |
| Location | Obstacle | Distances | |
|---|---|---|---|
| STA-1 | CUMT | Wall | 3.09, 4.95, 7.03, 9.10, 11.00, 13.01, 15.08 |
| STA-2 | CUMT | Human | 1.01, 3.21, 5.10, 6.08, 7.15, 8.14, 9.18, 10.22 |
| STA-3 | LAB | Human | 1.10, 2.29, 3.56, 4.80, 6.01, 7.14, 8.50, 9.56, 10.68 |
| STA-4 | LAB | Glass | 1.60, 3.04, 4.10, 5.21, 6.38, 7.56, 8.64, 9.49, 10.86 |
| CP | Stage | Number | CP | Stage | Number |
|---|---|---|---|---|---|
| ENS | 180 | SDS | 25 | ||
| ENS | 463 | ENS | 402 | ||
| SDS | 96 | k | SDS | 220 | |
| SRS | - | SDS | 96 |
| Scene | Method | Accuracy | Scene | Method | Accuracy | ||||
|---|---|---|---|---|---|---|---|---|---|
| STA-1 | Two-Step | 93.32 | 92.82 | 93.63 | STA-3 | Two-Step | 98.17 | 98.98 | 96.94 |
| K-NN [30] | 77.11 | 74.81 | 81.61 | K-NN | 81.97 | 77.60 | 82.78 | ||
| LS-SVM [21] | 83.00 | 89.90 | 81.70 | LS-SVM | 85.50 | 93.38 | 81.60 | ||
| CNN [24] | 89.01 | 91.20 | 87.43 | CNN | 94.13 | 95.60 | 92.62 | ||
| STA-2 | Two-Step | 93.44 | 94.18 | 92.91 | STA-4 | Two-Step | 95.28 | 96.88 | 93.12 |
| K-NN | 80.65 | 73.72 | 86.87 | K-NN | 75.48 | 73.56 | 79.89 | ||
| LS-SVM | 84.00 | 92.85 | 83.20 | LS-SVM | 86.90 | 93.20 | 80.50 | ||
| CNN | 90.51 | 93.60 | 88.72 | CNN | 92.37 | 93.03 | 89.09 |
| I-LOS | I-NLOS | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | STD | RMSE | Mean | STD | RMSE | ||||
| STA-1 | Original | 0.0566 | 0.2131 | 0.0454 | STA-1 | Original | 1.2615 | 1.7035 | 2.9014 |
| Mitigated | 0.0513 | 0.2085 | 0.0435 | Mitigated | 0.4850 | 0.6658 | 0.4432 | ||
| STA-2 | Original | 0.0546 | 0.2028 | 0.0411 | STA-2 | Original | 1.1315 | 1.6692 | 2.7859 |
| Mitigated | 0.0476 | 0.1746 | 0.0305 | Mitigated | 0.2524 | 0.8736 | 0.7630 | ||
| STA-3 | Original | 0.1571 | 0.4814 | 0.2319 | STA-3 | Original | 2.6189 | 4.4700 | 5.9747 |
| Mitigated | 0.0595 | 0.2244 | 0.0503 | Mitigated | 0.5988 | 1.4471 | 2.0936 | ||
| STA-4 | Original | 0.1209 | 0.4095 | 0.1677 | STA-4 | Original | 0.7854 | 1.9021 | 3.6174 |
| Mitigated | 0.1010 | 0.3987 | 0.1532 | Mitigated | 0.2904 | 0.7557 | 0.5709 |
| DYN-1 | DYN-2 | DYN-3 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Method | Mean | STD | RMSE | Mean | STD | RMSE | Mean | STD | RMSE |
| Original | 0.0953 | 0.1563 | 0.0244 | 0.2014 | 0.2166 | 0.0469 | 1.0329 | 1.9864 | 3.9425 |
| Mitigated | 0.0424 | 0.0774 | 0.0110 | 0.0834 | 0.0999 | 0.0260 | 0.5237 | 0.8001 | 1.6396 |
| K-NN | 0.0638 | 0.1036 | 0.0169 | 0.1418 | 0.1405 | 0.0301 | 0.7218 | 1.2940 | 2.2721 |
| LS-SVM | 0.0607 | 0.0946 | 0.0152 | 0.1225 | 0.1310 | 0.0325 | 0.6535 | 1.2264 | 2.1731 |
| CNN | 0.0551 | 0.0847 | 0.0139 | 0.1201 | 0.1207 | 0.0292 | 0.6287 | 1.0112 | 1.9799 |
| LSTM-EKF [14] | 0.0509 | 0.0907 | 0.0128 | 0.1016 | 0.1101 | 0.0285 | 0.6041 | 0.9239 | 1.8953 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Wang, Y.; Xu, S.; Bi, J.; Jia, H.; Seow, C. Ultra-Wideband Ranging Error Mitigation with Novel Channel Impulse Response Feature Parameters and Two-Step Non-Line-of-Sight Identification. Sensors 2024, 24, 1703. https://doi.org/10.3390/s24051703
Yang H, Wang Y, Xu S, Bi J, Jia H, Seow C. Ultra-Wideband Ranging Error Mitigation with Novel Channel Impulse Response Feature Parameters and Two-Step Non-Line-of-Sight Identification. Sensors. 2024; 24(5):1703. https://doi.org/10.3390/s24051703
Chicago/Turabian StyleYang, Hongchao, Yunjia Wang, Shenglei Xu, Jingxue Bi, Haonan Jia, and Cheekiat Seow. 2024. "Ultra-Wideband Ranging Error Mitigation with Novel Channel Impulse Response Feature Parameters and Two-Step Non-Line-of-Sight Identification" Sensors 24, no. 5: 1703. https://doi.org/10.3390/s24051703
APA StyleYang, H., Wang, Y., Xu, S., Bi, J., Jia, H., & Seow, C. (2024). Ultra-Wideband Ranging Error Mitigation with Novel Channel Impulse Response Feature Parameters and Two-Step Non-Line-of-Sight Identification. Sensors, 24(5), 1703. https://doi.org/10.3390/s24051703