
Comparing Video Analysis to Computerized Detection of Limb Position for the Diagnosis of Movement Control during Back Squat Exercise with Overload

 , , ,
, , ,  , ,
, ,  , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
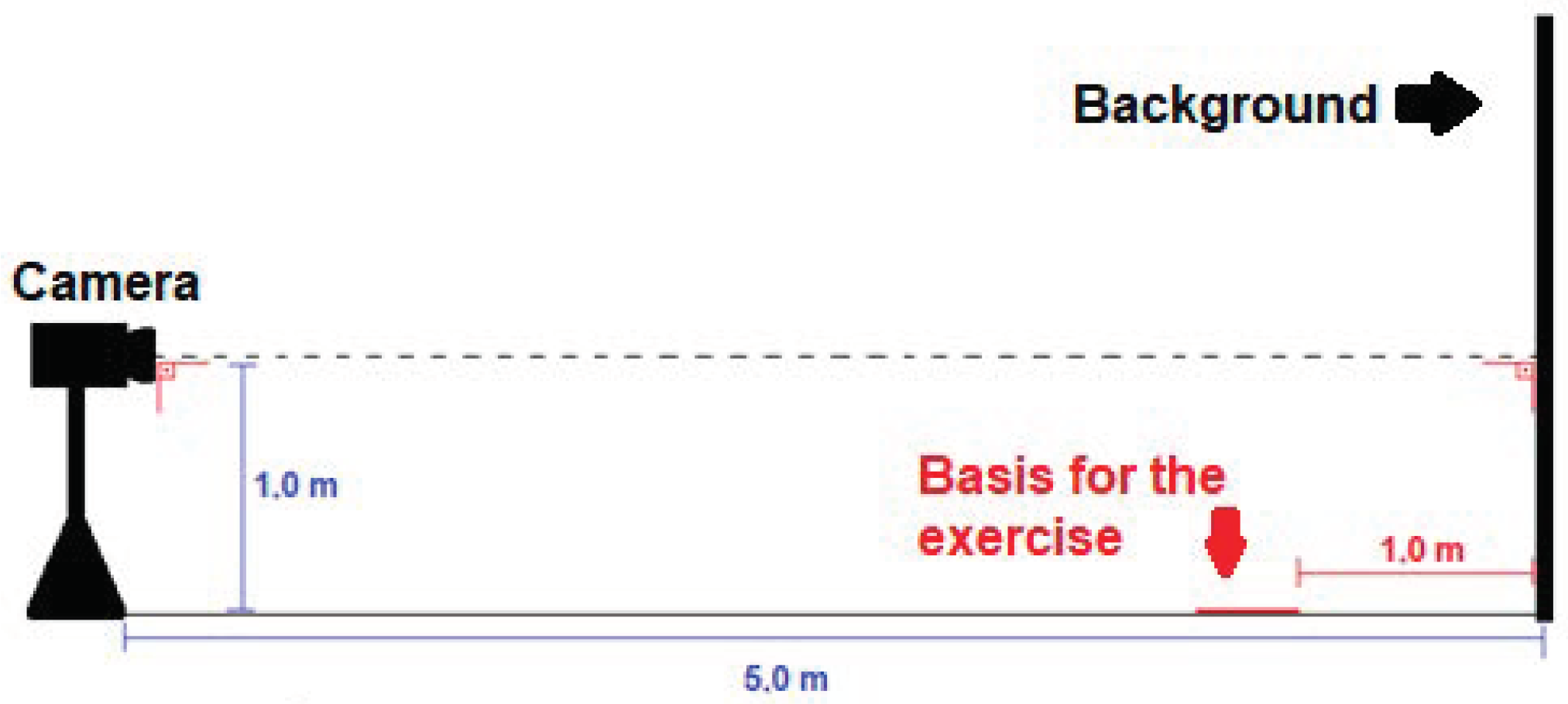
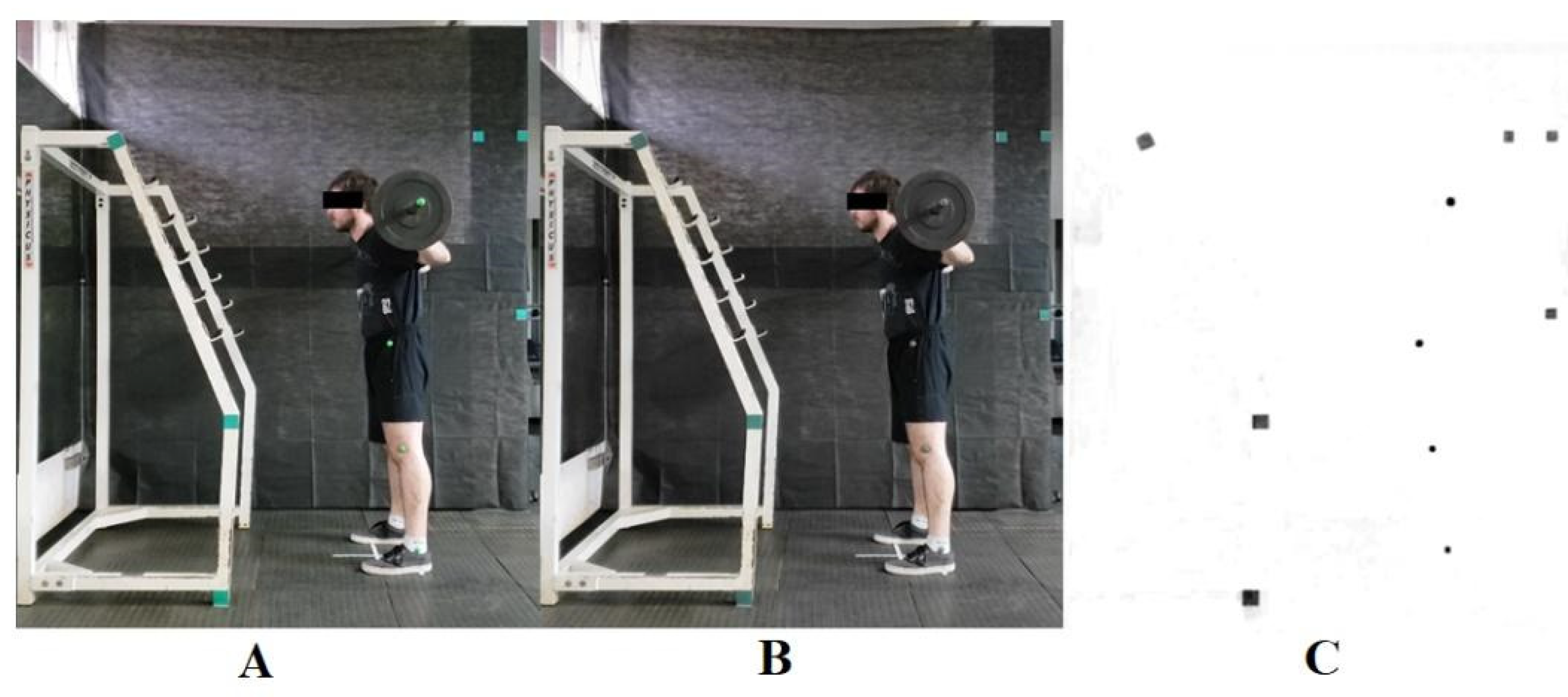
2.2. Data Collection
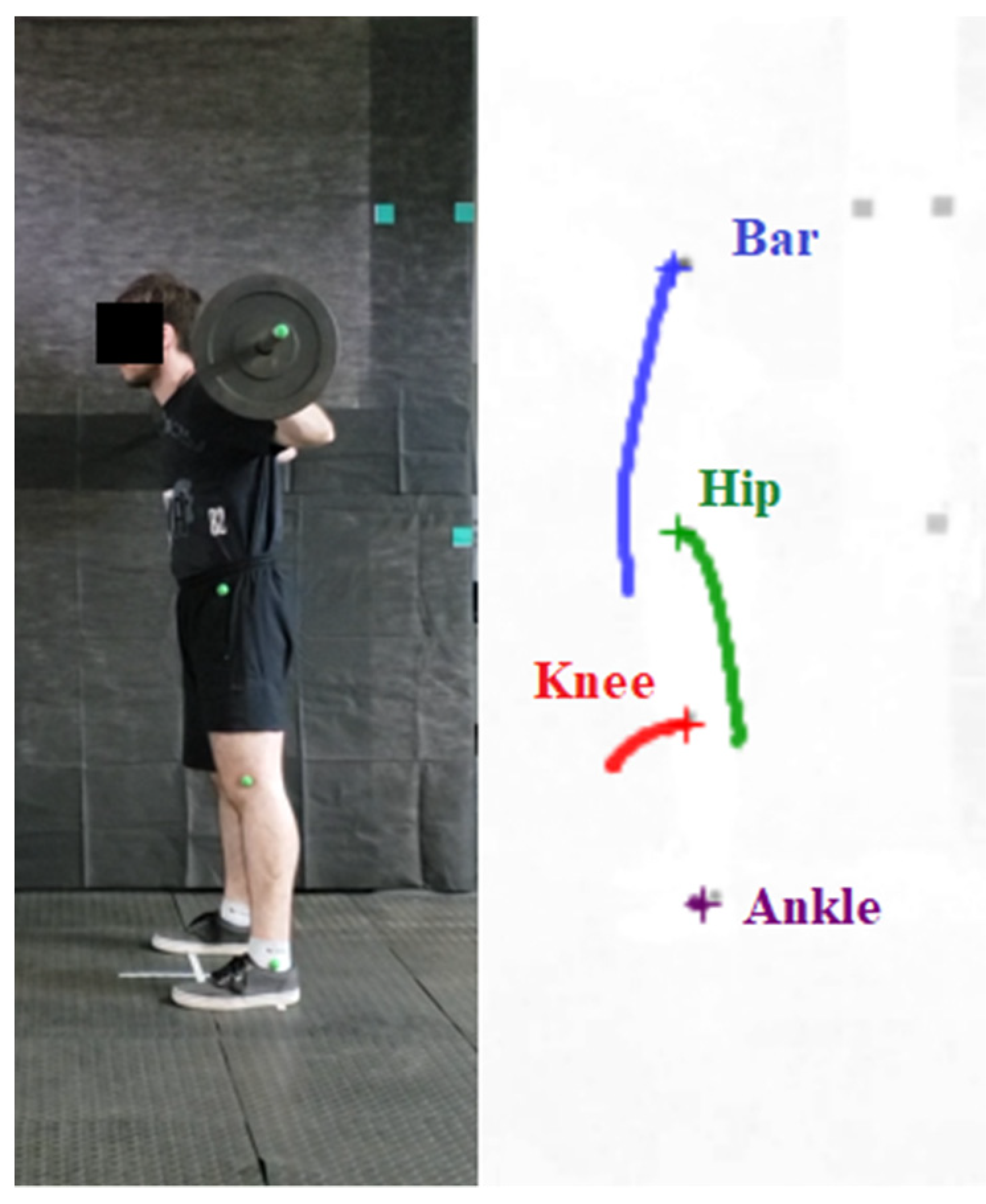
2.3. Displacement and Vertical Distance Measurements
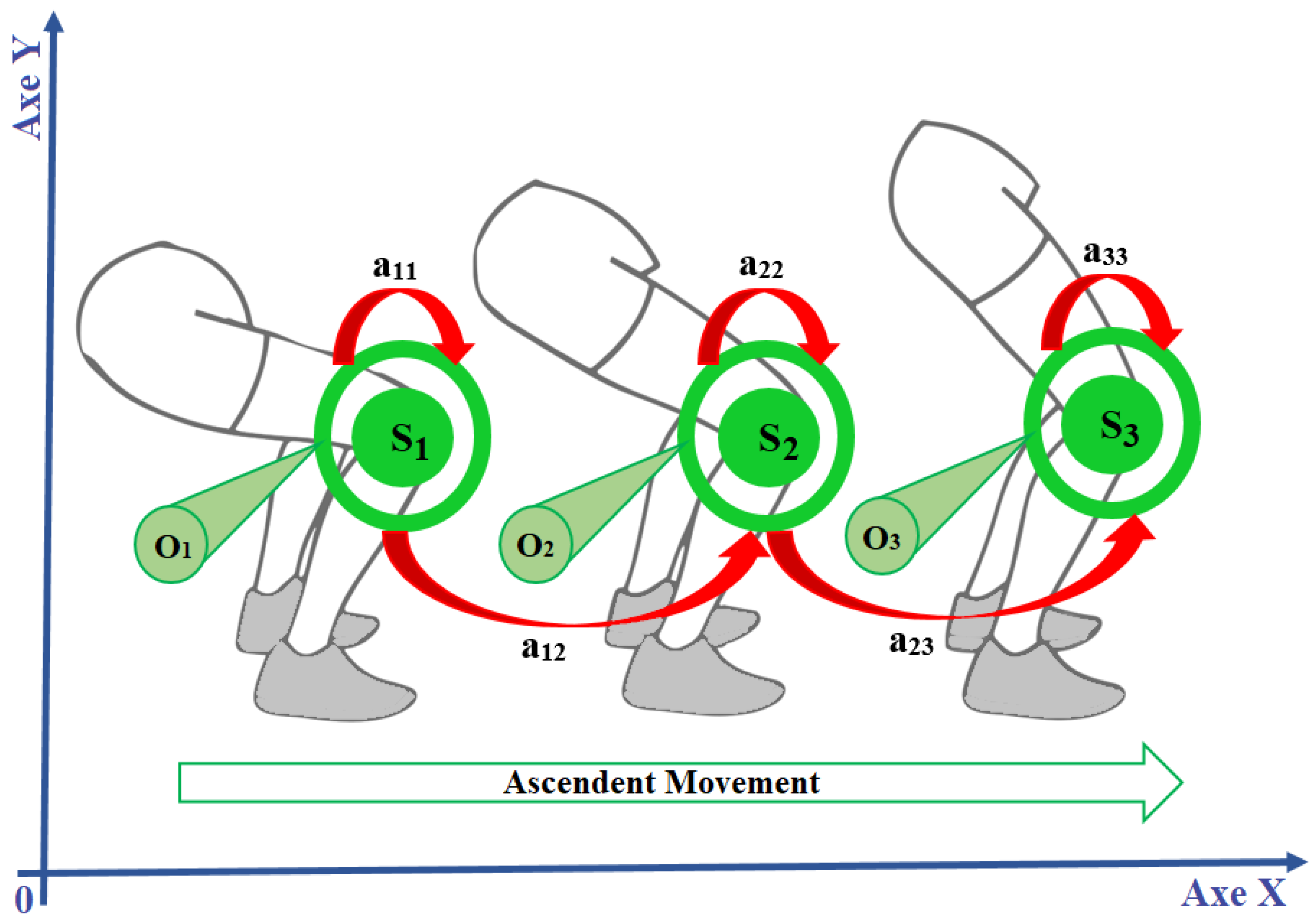
2.4. Modelling with HMMs
- N represents the number of states in the model;
- S = {S1, S2, …, SN} corresponds to the set of individual states in the model;
- M represents the number of distinct observations by state;
- O = {ok}, k = 1, …, M corresponds to the set of individual observations;
- A = {aij} corresponds to the distribution of transition probabilities of states and is calculated as follows:Thus, the probability that the model moves to state Sj at time t + 1 depends only on the state Si at time t, which is characteristic of a Markovian model.
- corresponds to the probability distribution of the observation in each state and is calculated as follows:
- corresponds to the initial distribution of states;
- λ represents the model given by λ = {A, B, π}.
2.5. Human Evaluation
2.6. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Keogh, J.W.L.; Wilson, G.J.; Weatherby, R.E. A Cross-Sectional Comparison of Different Resistance Training Techniques in the Bench Press. J. Strength Cond. Res. 1999, 13, 247–258. [Google Scholar]
- Kraemer, W.; Ratamess, N.; Fry, A.; Triplett-McBride, T.; Koziris, L.; Bauer, J.; Lynch, J.; Fleck, S. Influence of Resistance Training Volume and Periodization on Physiological and Performance Adaptations in Collegiate Women Tennis Players. Am. J. Sports Med. 2000, 28, 626–633. [Google Scholar] [CrossRef]
- Kraemer, W.J.; Ratamess, N.A. Fundamentals of resistance training: Progression and exercise prescription. Med. Sci. Sports Exerc. 2004, 36, 674–688. [Google Scholar] [CrossRef]
- Pollock, M.L.; Gaesser, G.A.; Butcher, J.D.; Després, J.P.; Dishman, R.K.; Franklin, B.A.; Garber, C.E. ACSM Position Stand: The Recommended Quantity and Quality of Exercise for Developing and Maintaining Cardiorespiratory and Muscular Fitness, and Flexibility in Healthy Adults. Med. Sci. Sports Exerc. 1998, 30, 975–991. [Google Scholar] [CrossRef]
- Kraemer, W.J.; Ratamess, N.A.; French, D.N. Resistance Training for Health and Performance. Curr. Sports Med. Rep. 2002, 1, 165–171. [Google Scholar] [CrossRef]
- Yu, J.S.; Habib, P.A. Common Injuries Related to Weightlifting: MR Imaging Perspective. Semin. Musculoskelet. Radiol. 2005, 9, 289–301. [Google Scholar] [CrossRef] [PubMed]
- Kolber, M.J.; Beekhuizen, K.S.; Cheng, M.S.S.; Hellman, M.A. Shoulder injuries attributed to resistance training: A brief review. J. Strength Cond. Res. 2010, 24, 1696–1704. [Google Scholar] [CrossRef]
- Butragueno, J.; Benito, P.J.; Maffuli, N. Injuries in Strength Training: Review and Practical Application. Eur. J. Hum. Mov. 2014, 32, 29–47. [Google Scholar]
- Knudson, D.V.; Morrison, G.S. Qualitative Analysis of Human Movement; Human Kinetics: Champaign, IL, USA, 2002. [Google Scholar]
- Magill, R.A. Motor Learning and Control: Concepts and Applications, 9th ed.; McGraw Hill: New York, NY, USA, 2011. [Google Scholar]
- Ploetz, T.; Fink, G.A. Markov Models for Handwriting Recognition; Springer: London, UK, 2011. [Google Scholar]
- Abdelkader, M.F.; Abd-Almageed, W.; Srivastava, A.; Chellappa, R. Silhouette-based Gesture and Action Recognition via Modeling Trajectories on Riemannian Shape Manifolds. Comput. Vis. Image Underst. 2011, 115, 439–455. [Google Scholar] [CrossRef]
- Correa, M.; Ruiz-del-solar, J.; Verschae, R.; Jong, L.; Castillo, N. Real-Time Hand Gesture Recognition for Human Robot Interaction. Lect. Notes Comput. Sci. 2009, 5949, 46–57. [Google Scholar] [CrossRef]
- Nam, Y.; Wohn, K. Recognition of Space-time Hand-gestures using Hidden Markov Model. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Hong Kong, China, 1–4 July 1996; pp. 51–58. [Google Scholar] [CrossRef]
- Mendes, N.; Ferrer, J.; Vitorino, J.; Safeea, M.; Neto, P. Human Behavior and Hand Gesture Classification for Smart Human-robot Interaction. Procedia Manuf. 2017, 11, 91–98. [Google Scholar] [CrossRef]
- Ghojogh, B.; Mohammadzade, H.; Mokari, M. Fisherposes for Human Action Recognition Using Kinect Sensor Data. IEEE Sens. J. 2018, 18, 1612–1627. [Google Scholar] [CrossRef]
- Hoque, S.M.A.; Haq, M.S.; Hasanuzzaman, M. Computer Vision Based Gesture Recognition for Desktop Object Manipulation. In Proceedings of the International Conference on Innovation in Engineering and Technology (ICIET), Dhaka, Bangladesh, 27–28 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Li, G.; Meng, Y.; Yan, C.; Song, C. Improvement and Implementation of Dynamic Gesture Recognition Algorithm Based on Kinect. Chin. High Technol. Lett. 2019, 29, 841–851. [Google Scholar] [CrossRef]
- Sutopo, J.; Abd Ghani, M.K.; Burhanuddin, M.A.; Zulhawati. Gesture Recognition of Dance using Chain Code and Hidden Markov Model. Int. J. Adv. Trends Comput. Sci. Eng. 2019, 8, 3194–3199. [Google Scholar] [CrossRef]
- Arslan, M.; Cruz, C.; Ginhac, D. Semantic Trajectory Insights for Worker Safety in Dynamic Environments. Autom. Constr. 2019, 106, 102854. [Google Scholar] [CrossRef]
- Urgo, M.; Tarabini, M.; Tolio, T. A Human Modelling and Monitoring Approach to Support the Execution of Manufacturing Operations. CIRP Ann. 2019, 68, 5–8. [Google Scholar] [CrossRef]
- Vildjiounaite, E.; Huotari, V.; Kallio, J.; Kyllönen, V.; Mäkelä, S.M.; Gimel’farb, G. Unobtrusive assessment of stress of office workers via analysis of their motion trajectories. Pervasive Mob. Comput. 2019, 58, 101028. [Google Scholar] [CrossRef]
- Singla, A.; Roy, P.P.; Dogra, D.P. Visual Rendering of Shapes on 2D Display Devices Guided by Hand Gestures. Displays 2019, 57, 18–33. [Google Scholar] [CrossRef]
- Tran, C.; Doshi, A.; Trivedi, M.M. Modeling and Prediction of Driver Behavior by Foot Gesture Analysis. Comput. Vis. Image Underst. 2012, 116, 435–445. [Google Scholar] [CrossRef]
- Yamada, K.; Matsuura, K.; Hamagami, K.; Inui, H. Motor Skill Development using Motion Recognition Based on an HMM. Procedia Comput. Sci. 2013, 22, 1112–1120. [Google Scholar] [CrossRef]
- Carrasco, M.; Clady, X. Exploiting Eye–hand Coordination to Detect Grasping Movements. Image Vis. Comput. 2012, 30, 860–874. [Google Scholar] [CrossRef]
- Haji-Abolhassani, A.; Clark, J.J. An inverse Yarbus process: Predicting Observers’ Task From Eye Movement Patterns. Vis. Res. 2014, 103, 127–142. [Google Scholar] [CrossRef]
- Pao, H.K.; Fadlil, J.; Lin, H.Y. Trajectory Analysis for user Verification and Recognition. Knowl. Based Syst. 2012, 34, 81–90. [Google Scholar] [CrossRef]
- Fujii, K.; Gras, G.; Salerno, A.; Yang, G.Z. Gaze Gesture Based Human Robot Interaction for Laparoscopic Surgery. Med. Image Anal. 2018, 44, 196–214. [Google Scholar] [CrossRef] [PubMed]
- VanWye, W.R.; Hoover, D.L. Management of a Patient’s Gait Abnormality Using Smartphone Technology In-clinic for improved Qualitative Analysis: A Case Report. Physiother. Theory Pract. 2018, 34, 403–410. [Google Scholar] [CrossRef] [PubMed]
- McKean, M.R.; Dunn, P.K.; Burkett, B.J. Quantifying the Movement and the Influence of Load in the Back Squat exercise. J. Strength Cond. Res. 2010, 24, 1671–1679. [Google Scholar] [CrossRef] [PubMed]
- Escamilla, R.F.; Fleisig, G.S.; Zheng, N.I.G.E.L.; Barrentine, S.W.; Wilk, K.E.; Andrews, J.R. Biomechanics of the Knee During Closed Kinetic Chain and Open Kinetic Chain Exercises. Med. Sci. Sports Exerc. 1998, 30, 556–569. [Google Scholar] [CrossRef] [PubMed]
- Mota, Y.L.; Mochizuki, L.; Carvalho, G.A. Influência da Resolução e da Distância da Câmera nas Medidas Feitas pelo Software de Avaliação Postural (sapo). Rev. Bras. Med. Esporte 2011, 17, 334–338. [Google Scholar] [CrossRef]
- Nor Adnan, N.M.; Ab Patar, M.N.A.; Lee, H.; Yamamoto, S.I.; Jong-Young, L.; Mahmud, J. Biomechanical Analysis Using Kinovea for sports application. IOP Conf. Ser. Mater. Sci. Eng. 2018, 342, 012097. [Google Scholar] [CrossRef]
- Dæhlin, T.E.; Krosshaug, T.; Chiu, L.Z.F. Enhancing Digital Video Analysis of Bar Kinematics in Weightlifting: A Case Study. J. Strength Cond. Res. 2017, 31, 1592–1600. [Google Scholar] [CrossRef]
- Balsalobre-Fernández, C.; Tejero-González, C.M.; del Campo-Vecino, J.; Bavaresco, N. The Concurrent Validity and Reliability of a Low-Cost, High-Speed Camera-Based Method for Measuring the Flight Time of Vertical Jumps. J. Strength Cond. Res. 2014, 28, 528–533. [Google Scholar] [CrossRef]
- Puig-Diví, A.; Escalona-Marfil, C.; Padullés-Riu, J.M.; Busquets, A.; Padullés-Chando, X.; Marcos-Ruiz, D. Validity and Reliability of the Kinovea Program in Obtaining Angles and Distances Using Coordinates In 4 Perspectives. PLoS ONE 2019, 14, e0216448. [Google Scholar] [CrossRef]
- Wang, S.; Chen, J.; Wang, H.; Zhang, D. Degradation Evaluation of Slewing Bearing using HMM and Improved GRU. Measurement 2019, 146, 385–396. [Google Scholar] [CrossRef]
- Juang, B.H.; Rabiner, L.R. A Probabilistic Distance Measure for Hidden Markov Models. AT&T Tech. J. 1985, 64, 391–408. [Google Scholar] [CrossRef]
- Juang, B.H.; Rabiner, L.R. Hidden Markov Models for Speech Recognition. Technometrics 1991, 33, 251–272. [Google Scholar] [CrossRef]
- Rabiner, L.R.; Juang, B.H. Fundamentals of Speech Recognition; Pearson Education India: Noida, India, 1993. [Google Scholar]
- Hong, K.; Lin, G. State Classification of Transformers using Nonlinear Dynamic Analysis and Hidden Markov models. Measurement 2019, 147, 106851. [Google Scholar] [CrossRef]
- Fink, G.A. Markov Models for Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Nguyen, T.-N.; Huynh, H.-H.; Meunier, J. Skeleton-Based Abnormal Gait Detection. Sensors 2016, 16, 1792. [Google Scholar] [CrossRef] [PubMed]
- Ghahramani, Z. Zoubin Ghahramani Software. 2019. Available online: http://mlg.eng.cam.ac.uk/zoubin/software.html (accessed on 20 May 2023).
- Nguyen, N. An Analysis and Implementation of the Hidden Markov Model to Technology Stock Prediction. Risks 2017, 5, 62. [Google Scholar] [CrossRef]
- Herta, C. K-Mean Cluster Algorithm. Available online: http://www.christianherta.de/kmeans.php (accessed on 15 May 2023).
- Mathworks. Hidden Markov Models (HMM)—MATLAB & Simulink. 2023. Available online: https://www.mathworks.com/help/stats/hidden-markov-models-hmm.html (accessed on 24 May 2023).
- Andersson, M.; Gustafsson, F.; St-Laurent, L.; Prevost, D. Recognition of Anomalous Motion Patterns in Urban Surveillance. IEEE J. Sel. Top. Signal Process. 2013, 7, 102–110. [Google Scholar] [CrossRef]
- Kaufman, L.; Rousseeuw, P.J. Finding Groups in Data: An Introduction to Cluster Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Rabiner, L. A Tutorial on Hidden Markov Models and Selected Applications in Speech Recognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef]
- Tang, W.; Hu, J.; Zhang, H.; Wu, P.; He, H. Kappa coefficient: A popular measure of rater agreement. Shanghai Arch. Psychiatry 2015, 27, 62–67. [Google Scholar] [CrossRef]
- Peres, A.B.; Espada, M.C.; Santos, F.J.; Robalo, R.A.M.; Dias, A.A.P.; Muñoz-Jiménez, J.; Sancassani, A.; Massini, D.A.; Pessôa Filho, D.M. Accuracy of Hidden Markov Models in Identifying Alterations in Movement Patterns during Biceps-Curl Weight-Lifting Exercise. Appl. Sci. 2023, 13, 573. [Google Scholar] [CrossRef]
- Pueo, B.; Lopez, J.J.; Mossi, J.M.; Colomer, A.; Jimenez-Olmedo, J.M. Video-Based System for Automatic Measurement of Barbell Velocity in Back Squat. Sensors 2021, 21, 925. [Google Scholar] [CrossRef] [PubMed]
- Scott, S.H. Role of Motor Cortex in Coordinating Multi-joint Movements: Is it Time for a new Paradigm? Can. J. Physiol. Pharmacol. 2000, 78, 923–933. [Google Scholar] [CrossRef] [PubMed]
- Taborri, J.; Scalona, E.; Palermo, E.; Rossi, S.; Cappa, P. Validation of Inter-Subject Training for Hidden Markov Models Applied to Gait Phase Detection in Children with Cerebral Palsy. Sensors 2015, 15, 24514–24529. [Google Scholar] [CrossRef] [PubMed]
- Baechle, T.R.; Earle, R.W. Essentials of Strength Training and Conditioning; Human Kinetics: Champaign, IL, USA, 2008. [Google Scholar]
- Collins, J.J.; De Luca, C.J. Open-loop and closed-loop control of posture: A Random-walk Analysis of Center-of-pressure Trajectories. Exp. Brain Res. 1993, 95, 308–318. [Google Scholar] [CrossRef] [PubMed]
- Latash, M.L. Neurophysiological Basis of Movement, 2nd ed.; Human Kinetics: Champaign, IL, USA, 2008; p. 427. [Google Scholar]
- Porz, N.; Knecht, U.; Sick, B.; Murina, E.; Barros, N.; Schucht, P.; Herrmann, E.; Gralla, J.; Wiest, R.; El-Koussy, M.; et al. Computer-Aided Radiological Diagnostics Improves the Preoperative Diagnoses of Medulloblastoma, Pilocytic Astrocytoma, and Ependymoma: A Reproducibility Study. Clin. Transl. Neurosci. 2018, 2, 26. [Google Scholar] [CrossRef]
- Fang, R.; Tang, K.D.; Snavely, N.; Chen, T. Towards Computational Models of Kinship Verification. In Proceedings of the 2010 IEEE International Conference on Image Processing (ICIP), Hong Kong, China, 26–29 September 2010; pp. 1577–1580. [Google Scholar] [CrossRef]
- Aggarwal, J.K.; Cai, Q. Human Motion Analysis: A review. Comp Vis. Image Understand 1999, 73, 428–440. [Google Scholar] [CrossRef]
- Poppe, R. Vision-based Human Motion Analysis: An overview. Comp Vis. Image Understand 2007, 108, 4–18. [Google Scholar] [CrossRef]
- Carroll, W.R.; Bandura, A. Role of Timing of Visual Monitoring and Motor Rehearsal in Observational Learning of Action Patterns. J. Motor Behav. 2013, 17, 269–281. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- Zawadka, M.; Smolka, J.; Skublewska-Paszkowska, M.; Lukasik, E.; Gawda, P. How Are Squat Timing and Kinematics in The Sagittal Plane Related to Squat Depth? J. Sports Sci. Med. 2020, 19, 500–507. [Google Scholar] [PubMed]
- Lv, F.; Nevatia, R. Recognition and Segmentation of 3-D Human Action Using HMM and Multi-class AdaBoost. In Proceedings of the Computer Vision-ECCV, 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006. [Google Scholar] [CrossRef]
- Bengtsson, V.; Berglund, L.; Öhberg, F.; Aasa, U. Thoracolumbar and Lumbopelvic Spinal Alignment During the Barbell Back Squat: A Comparison Between Men and Women. Int. J. Sports Phys. Ther. 2023, 18, 820–830. [Google Scholar] [CrossRef] [PubMed]
- Knopfli, C.; Achermann, B.; Oberhofer, K.; Lorenzetti, S.R. First Insights in the Relationship between Lower Limb Anatomy and Back Squat Performance in Resistance-Trained Males and Females. Bioengineering 2023, 10, 865. [Google Scholar] [CrossRef] [PubMed]
- Zawadka, M.; Smolka, J.; Skublewska-Paszkowska, M.; Lukasik, E.; Bys, A.; Zielinski, G.; Gawda, P. Sex-dependent Differences in Single-leg Squat Kinematics and their Relationship to Squat Depth in Physically Active Individuals. Sci. Rep. 2020, 10, 19601. [Google Scholar] [CrossRef]
- Sayers, M.G.; Bachem, C.; Schütz, P.; Taylor, W.R.; List, R.; Lorenzetti, S.; Nasab, S.H. The Effect of Elevating the Heels on Spinal Kinematics and Kinetics During the Back Squat in Trained and Novice Weight Trainers. J. Sports Sci. 2020, 38, 1000–1008. [Google Scholar] [CrossRef]
- Lee, J.H.; Sung, I.Y.; Yoo, J.Y. Therapeutic Effects of Strengthening Exercise on Gait Function of Cerebral Palsy. Disabil. Rehabil. 2008, 30, 1439–1444. [Google Scholar] [CrossRef]
- Giblin, G.; Farrow, D.; Reid, M.; Ball, K.; Abernethy, B. Perceiving movement patterns: Implications for skill evaluation, correction and development. RICYDE. Rev. Int. Cien Deporte. 2014, 11, 5–17. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load—0% | Load—50% | Load—75% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Volunteer | Barbell | Hip | Knee | Ankle | Barbell | Hip | Knee | Ankle | Barbell | Hip | Knee | Ankle |
| 01 | 56.0 | 26.5 | 8.1 | 0.5 | 59.6 | 32.8 | 8.8 | 0.3 | 56.0 | 31.2 | 7.8 | 0.4 |
| 02 | 62.5 | 37.5 | 8.2 | 0.2 | 56.0 | 35.3 | 7.4 | 0.2 | 55.6 | 33.9 | 6.9 | 0.2 |
| 03 | 65.3 | 40.3 | 11.5 | 0.6 | 65.6 | 41.7 | 11.5 | 0.7 | 62.3 | 38.0 | 10.5 | 0.6 |
| 04 | 63.6 | 25.6 | 8.1 | 1.3 | 66.9 | 31.0 | 9.4 | 0.9 | 63.2 | 32.5 | 9.8 | 1.0 |
| 05 | 63.0 | 28.2 | 7.4 | 0.6 | 67.1 | 35.2 | 8.8 | 0.5 | 69.1 | 37.2 | 9.7 | 0.5 |
| 06 | 54.1 | 25.5 | 8.0 | 0.3 | 58.0 | 31.9 | 9.2 | 0.2 | 58.5 | 31.5 | 9.5 | 0.2 |
| 07 | 79.3 | 39.5 | 10.8 | 0.2 | 75.5 | 34.2 | 9.5 | 0.3 | 65.8 | 26.0 | 7.3 | 0.2 |
| 08 | 59.0 | 31.5 | 8.0 | 0.3 | 63.5 | 36.2 | 9.5 | 0.4 | 64.6 | 37.8 | 9.8 | 0.6 |
| 09 | 72.7 | 38.6 | 11.0 | 0.4 | 75.7 | 44.4 | 12.0 | 0.4 | 79.3 | 46.7 | 13.6 | 0.6 |
| 10 | 46.7 | 29.9 | 7.2 | 0.5 | 49.0 | 30.9 | 8.7 | 0.4 | 50.0 | 31.8 | 8.1 | 0.5 |
| Mean ± SD | 62.2 ± 9.2 | 32.3 ± 6.1 | 8.8 ± 1.6 | 0.5 ± 0.3 | 63.7 ± 8.4 | 35.4 ± 4.5 | 9.5 ± 1.3 | 0.4 ± 0.2 | 62.4 ± 8.2 | 34.7 ± 5.6 | 9.3 ± 2.0 | 0.5 ± 0.2 |
| Volunteers | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Loads | p/n | 01 | 02 | 03 | 04 | 05 | 06 | 07 | 08 | 09 | 10 | |
| Knee | 0–50% | p | … | … | … | … | 0.000 | 0.028 | … | 0.001 | 0.021 | 0.009 |
| n | 30 | 40 | 20 | 30 | 20 | |||||||
| 0–75% | p | 0.901 | 0.007 | 0.035 | 0.023 | 0.000 | 0.013 | 0.002 | 0.000 | 0.000 | … | |
| n | 30 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | ||||
| Hip | 0–50% | p | 0.024 | … | … | 0.003 | 0.003 | 0.000 | … | 0.033 | 0.003 | … |
| n | 30 | 20 | 40 | 45 | 35 | 30 | ||||||
| 0–75% | p | … | … | … | 0.001 | 0.001 | 0.001 | 0.004 | 0.009 | 0.000 | … | |
| n | 20 | 35 | 45 | 20 | 35 | 35 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peres, A.B.; Sancassani, A.; Castro, E.A.; Almeida, T.A.F.; Massini, D.A.; Macedo, A.G.; Espada, M.C.; Hernández-Beltrán, V.; Gamonales, J.M.; Pessôa Filho, D.M. Comparing Video Analysis to Computerized Detection of Limb Position for the Diagnosis of Movement Control during Back Squat Exercise with Overload. Sensors 2024, 24, 1910. https://doi.org/10.3390/s24061910
Peres AB, Sancassani A, Castro EA, Almeida TAF, Massini DA, Macedo AG, Espada MC, Hernández-Beltrán V, Gamonales JM, Pessôa Filho DM. Comparing Video Analysis to Computerized Detection of Limb Position for the Diagnosis of Movement Control during Back Squat Exercise with Overload. Sensors. 2024; 24(6):1910. https://doi.org/10.3390/s24061910
Chicago/Turabian StylePeres, André B., Andrei Sancassani, Eliane A. Castro, Tiago A. F. Almeida, Danilo A. Massini, Anderson G. Macedo, Mário C. Espada, Víctor Hernández-Beltrán, José M. Gamonales, and Dalton M. Pessôa Filho. 2024. "Comparing Video Analysis to Computerized Detection of Limb Position for the Diagnosis of Movement Control during Back Squat Exercise with Overload" Sensors 24, no. 6: 1910. https://doi.org/10.3390/s24061910
APA StylePeres, A. B., Sancassani, A., Castro, E. A., Almeida, T. A. F., Massini, D. A., Macedo, A. G., Espada, M. C., Hernández-Beltrán, V., Gamonales, J. M., & Pessôa Filho, D. M. (2024). Comparing Video Analysis to Computerized Detection of Limb Position for the Diagnosis of Movement Control during Back Squat Exercise with Overload. Sensors, 24(6), 1910. https://doi.org/10.3390/s24061910