
Low-Cost Approach to an Instream Water Depth Sensor Construction Using Differential Pressure Sensors and Arduino Microcontrollers

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
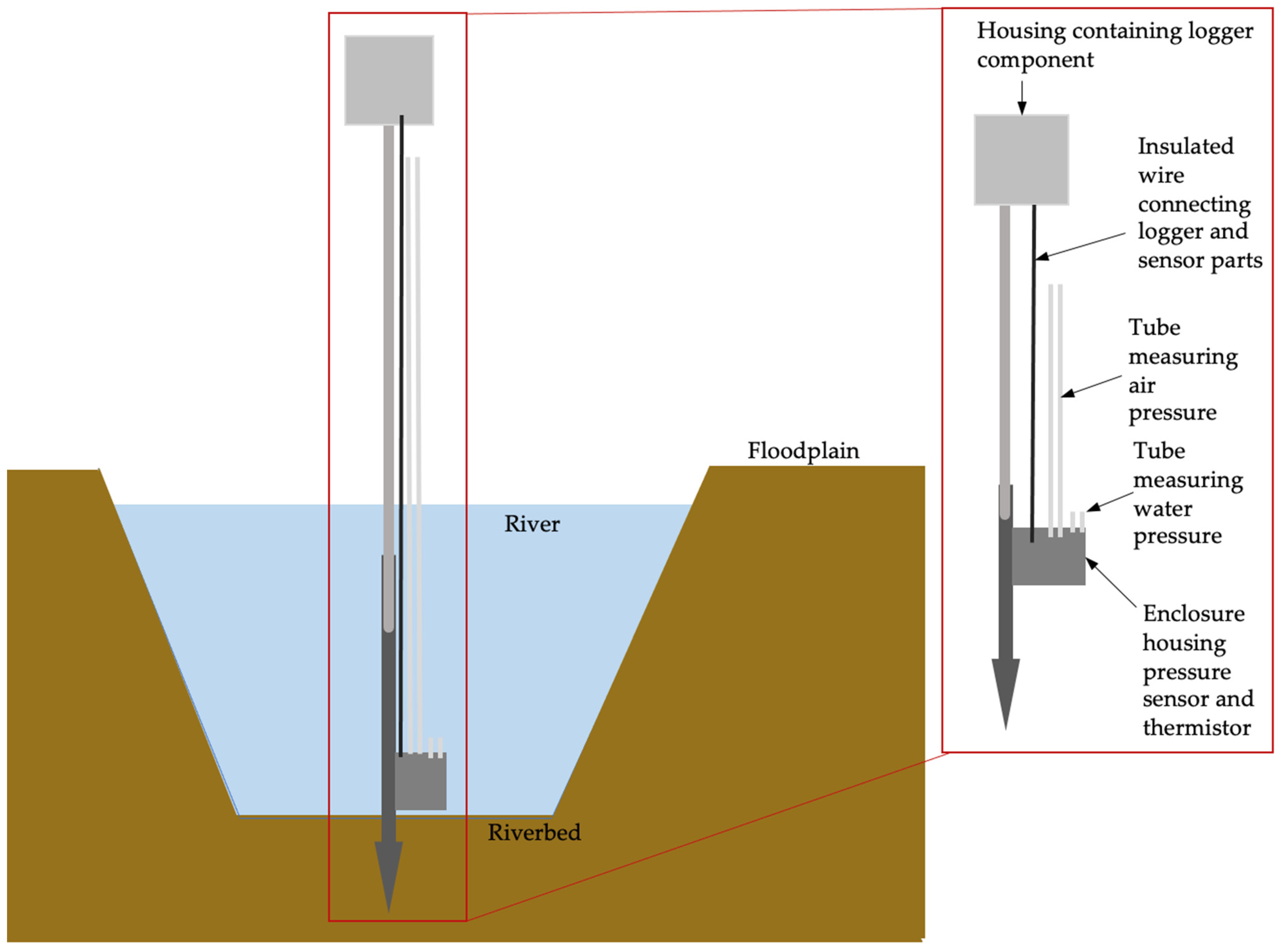
2.1. Water Depth Logger Design
2.2. Key Components
2.2.1. Arduino Microcontroller
2.2.2. Differential Pressure Sensors
2.2.3. Thermistor
2.2.4. Power Consumption
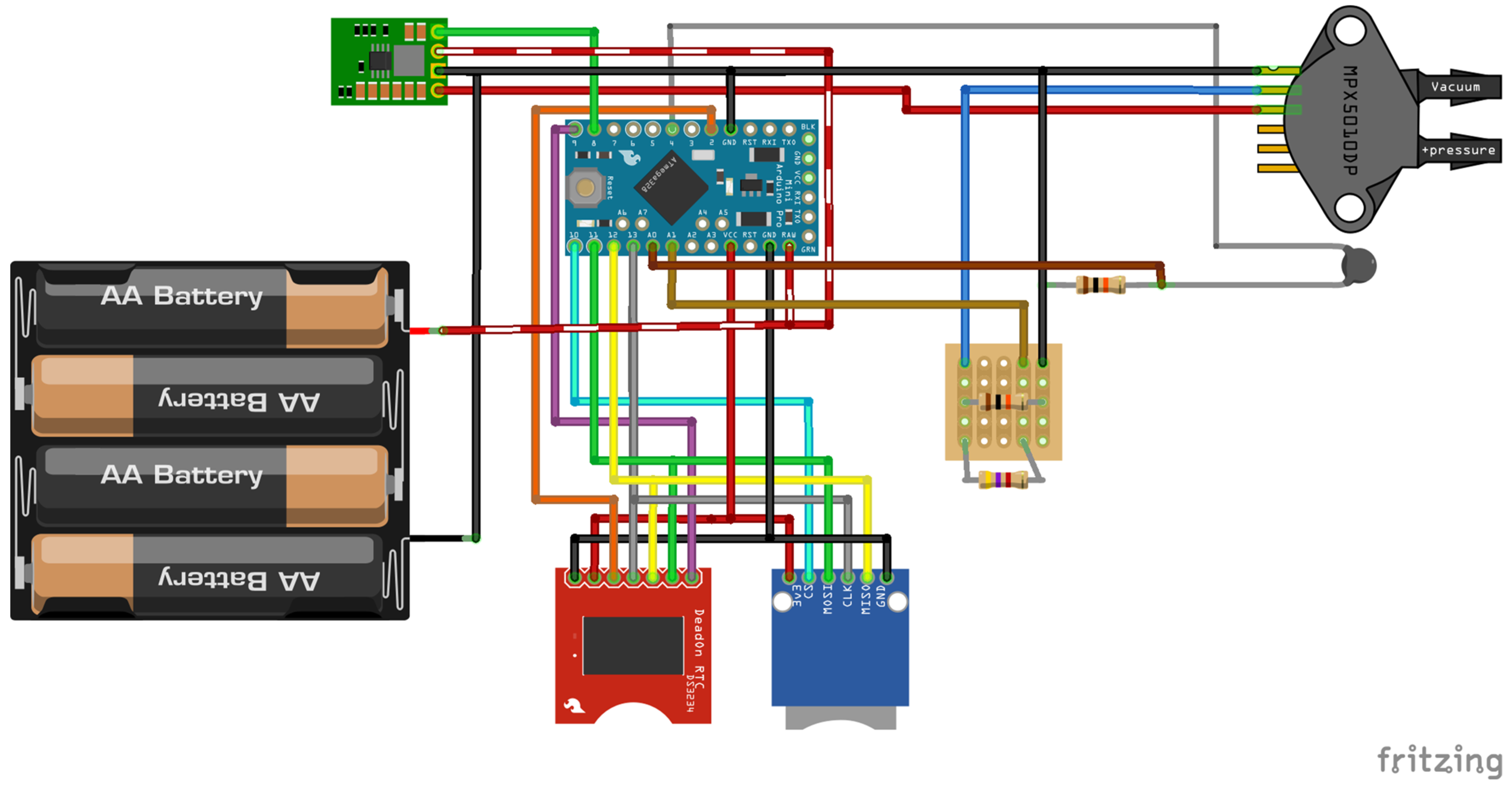
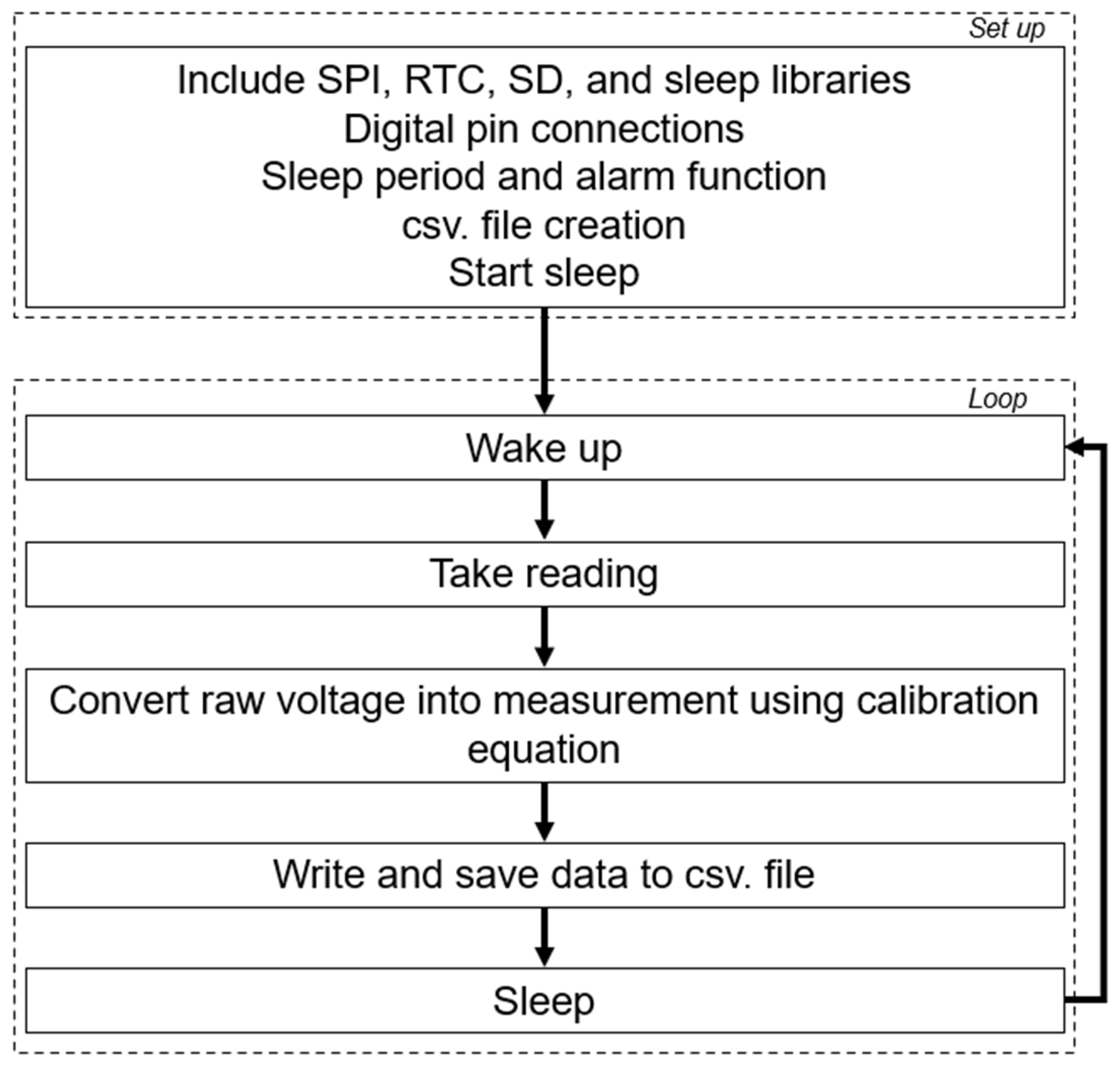
2.3. Wiring and Coding
2.4. Sensor Calibration
2.4.1. Pressure
2.4.2. Temperature
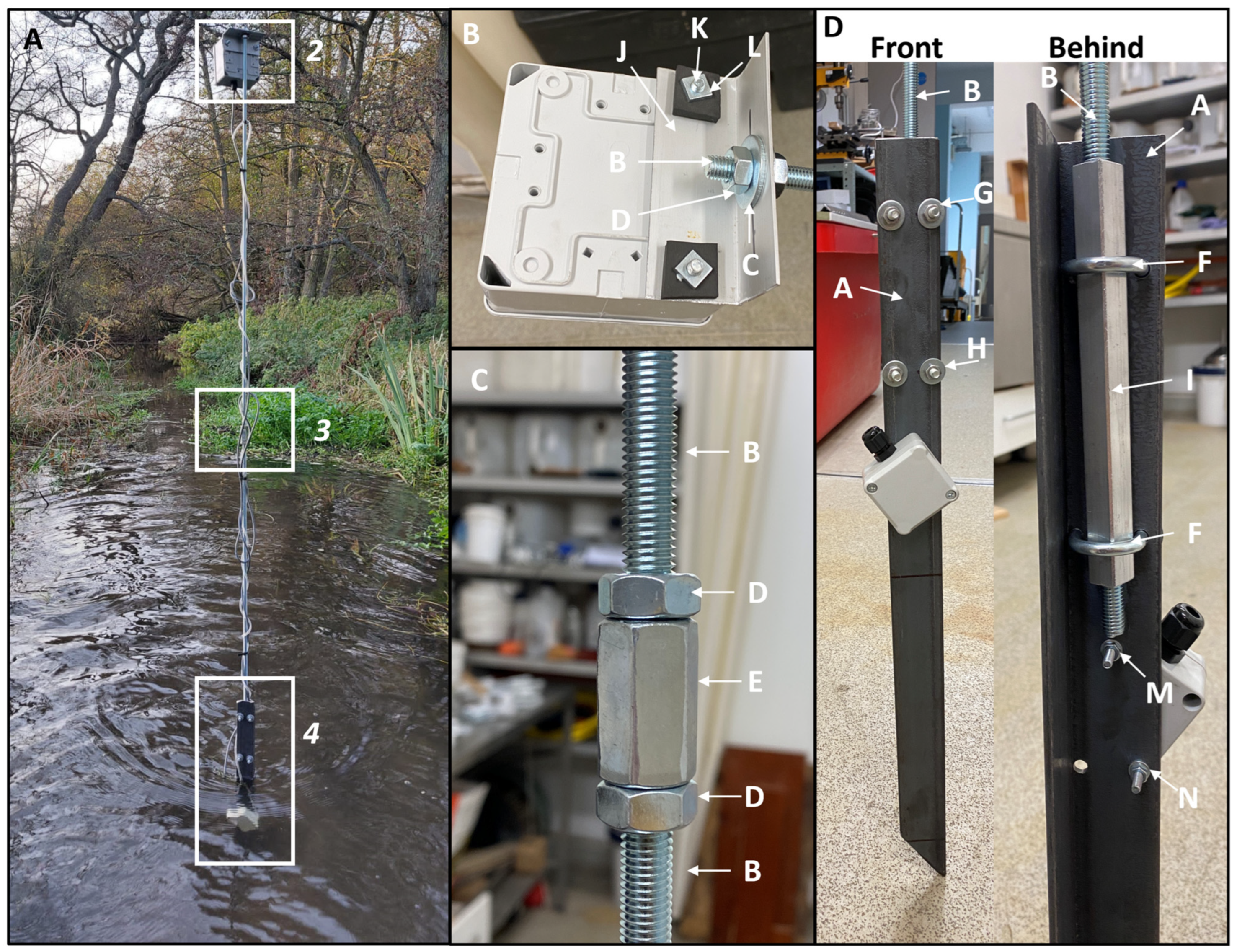
2.5. Field Test Design

3. Results
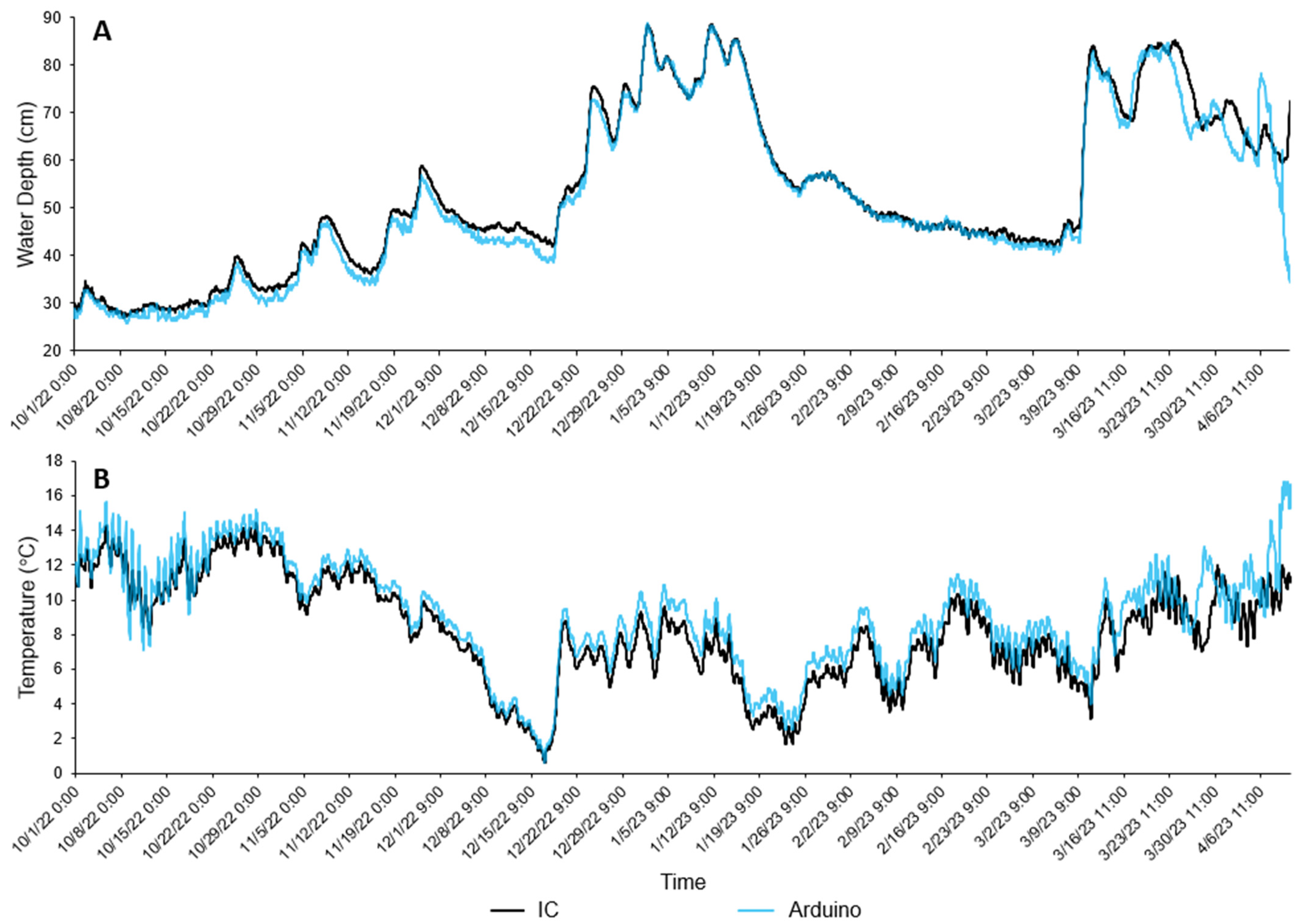
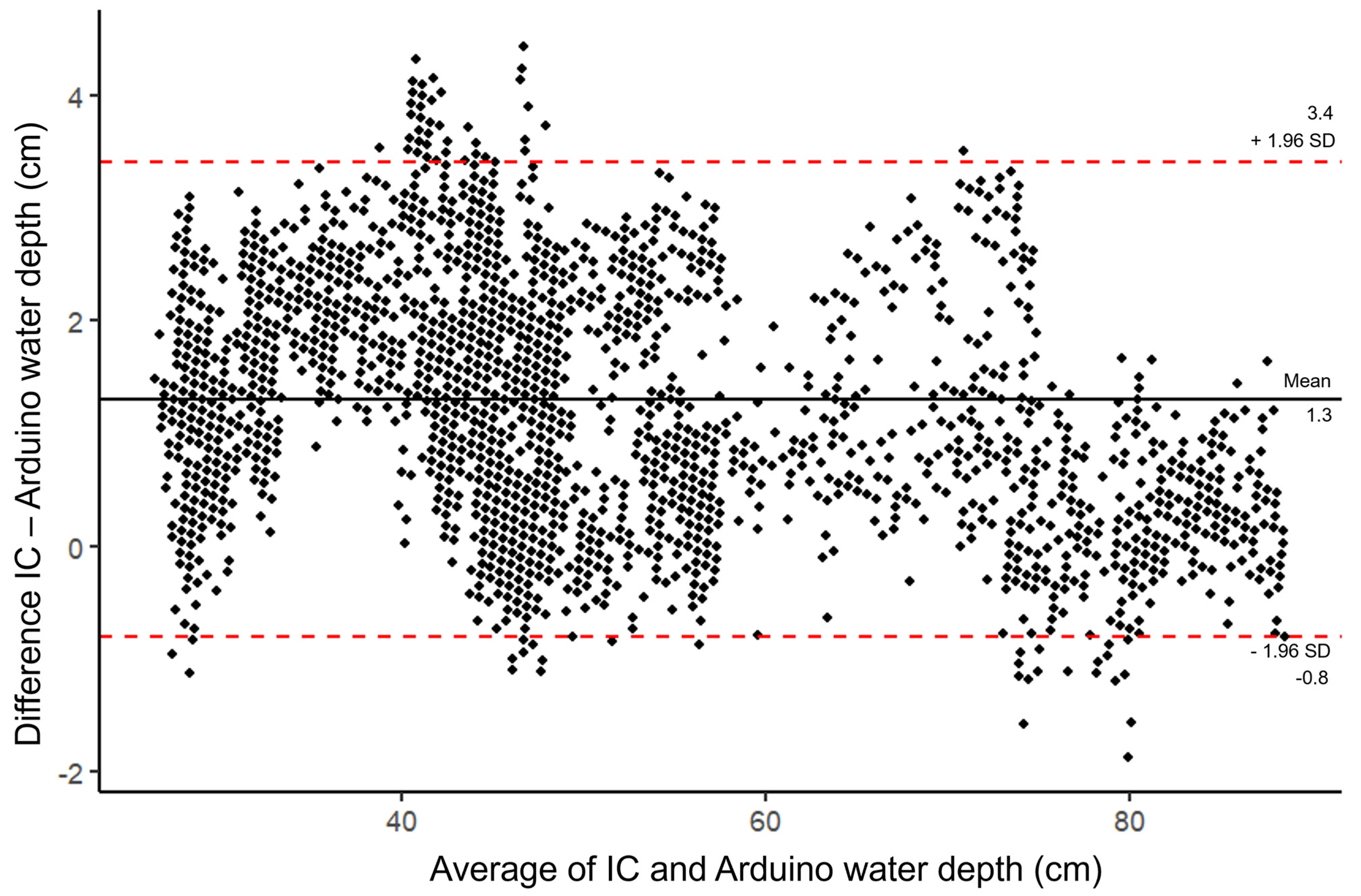
3.1. Water Depth
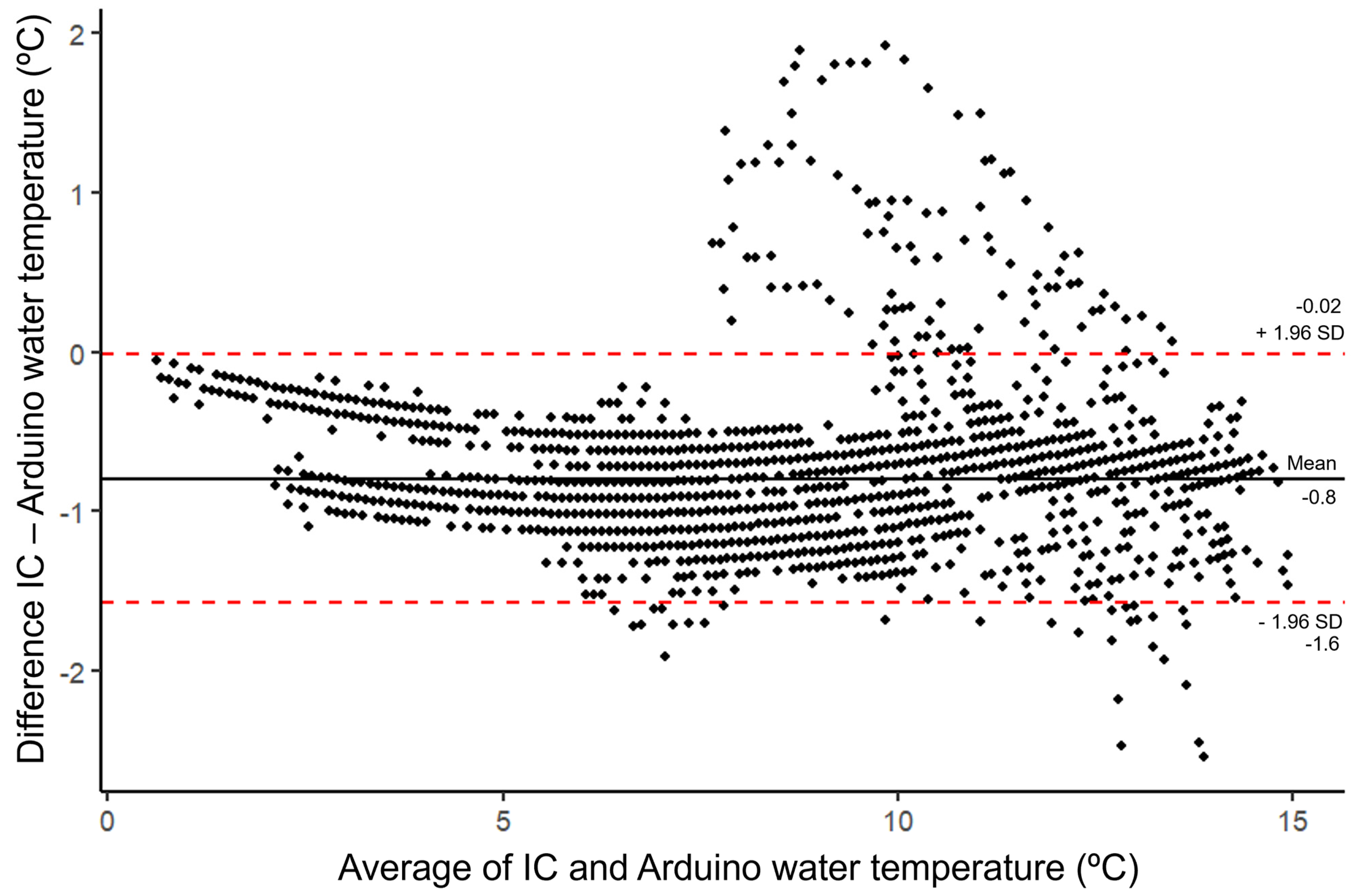
3.2. Temperature
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gleick, P.H. Climate Change, Hydrology, and Water Resources. Rev. Geophys. 1989, 27, 329–344. [Google Scholar] [CrossRef]
- Fry, M.J.; Swain, O. Hydrological Data Management Systems within a National River Flow Archive; Kirby, C., Ed.; British Hydrological Society, Newcastle University: Newcastle upon Tyne, UK, 2010; pp. 808–815. [Google Scholar]
- Hannaford, J. Climate-Driven Changes in UK River Flows: A Review of the Evidence. Prog. Phys. Geogr. Earth Environ. 2015, 39, 29–48. [Google Scholar] [CrossRef]
- Lagerspetz, E.; Motlagh, N.H.; Arbayani Zaidan, M.; Fung, P.L.; Mineraud, J.; Varjonen, S.; Siekkinen, M.; Nurmi, P.; Matsumi, Y.; Tarkoma, S.; et al. MegaSense: Feasibility of Low-Cost Sensors for Pollution Hot-Spot Detection. In Proceedings of the 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), Helsinki-Espoo, Finland, 22–25 July 2019; Volume 1, pp. 1083–1090. [Google Scholar] [CrossRef]
- Liu, X.; Jayaratne, R.; Thai, P.; Kuhn, T.; Zing, I.; Christensen, B.; Lamont, R.; Dunbabin, M.; Zhu, S.; Gao, J.; et al. Low-Cost Sensors as an Alternative for Long-Term Air Quality Monitoring. Environ. Res. 2020, 185, 109438. [Google Scholar] [CrossRef] [PubMed]
- Chan, K.; Schillereff, D.N.; Baas, A.C.; Chadwick, M.A.; Main, B.; Mulligan, M.; O’Shea, F.T.; Pearce, R.; Smith, T.E.; van Soesbergen, A.; et al. Low-Cost Electronic Sensors for Environmental Research: Pitfalls and Opportunities. Prog. Phys. Geogr. Earth Environ. 2021, 45, 305–338. [Google Scholar] [CrossRef]
- Mahajan, S.; Luo, C.-H.; Wu, D.-Y.; Chen, L.-J. From Do-It-Yourself (DIY) to Do-It-Together (DIT): Reflections on Designing a Citizen-Driven Air Quality Monitoring Framework in Taiwan. Sustain. Cities Soc. 2021, 66, 102628. [Google Scholar] [CrossRef]
- Dougherty, D. The Maker Movement. Innov. Technol. Gov. Glob. 2012, 7, 11–14. [Google Scholar] [CrossRef]
- Rose, K.; Eldridge, S.; Chapin, L. The Internet of Things: An Overview. Internet Soc. 2015, 80, 1–53. [Google Scholar]
- Rafalow, M. Tinkering Online: Digital Supports for Making and Sharing. In Makeology; Routledge: London, UK, 2016. [Google Scholar]
- Poh, J.-J.; Wu, W.-L.; Goh, N.W.-J.; Tan, S.M.-X.; Gan, S.K.-E. Spectrophotometer On-the-Go: The Development of a 2-in-1 UV–Vis Portable Arduino-Based Spectrophotometer. Sens. Actuators A Phys. 2021, 325, 112698. [Google Scholar] [CrossRef]
- Alimenti, F.; Bonafoni, S.; Gallo, E.; Palazzi, V.; Vincenti Gatti, R.; Mezzanotte, P.; Roselli, L.; Zito, D.; Barbetta, S.; Corradini, C.; et al. Noncontact Measurement of River Surface Velocity and Discharge Estimation with a Low-Cost Doppler Radar Sensor. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5195–5207. [Google Scholar] [CrossRef]
- Clilverd, H.M.; Thompson, J.R.; Heppell, C.M.; Sayer, C.D.; Axmacher, J.C. River–Floodplain Hydrology of an Embanked Lowland Chalk River and Initial Response to Embankment Removal. Hydrol. Sci. J. 2013, 58, 627–650. [Google Scholar] [CrossRef]
- Walton, S.E.; Nunn, A.D.; Probst, W.N.; Bolland, J.D.; Acreman, M.; Cowx, I.G. Do Fish Go with the Flow? The Effects of Periodic and Episodic Flow Pulses on 0+ Fish Biomass in a Constrained Lowland River. Ecohydrology 2017, 10, e1777. [Google Scholar] [CrossRef]
- Bolland, J.D.; Nunn, A.D.; Lucas, M.C.; Cowx, I.G. The Habitat Use of Young-of-the-Year Fishes during and after Floods of Varying Timing and Magnitude in a Constrained Lowland River. Ecol. Eng. 2015, 75, 434–440. [Google Scholar] [CrossRef]
- Copp, G.H. Microhabitat Use of Fish Larvae and 0+ Juveniles in a Highly Regulated Section of the River Great Ouse. Regul. Rivers Res. Manag. 1997, 13, 267–276. [Google Scholar] [CrossRef]
- Champkin, J.D.; Copp, G.H.; Sayer, C.D.; Clilverd, H.M.; George, L.; Vilizzi, L.; Godard, M.J.; Clarke, J.; Walker, A.M. Responses of Fishes and Lampreys to the Re-Creation of Meanders in a Small English Chalk Stream. River Res. Appl. 2018, 34, 34–43. [Google Scholar] [CrossRef]
- Yan, K.; Di Baldassarre, G.; Solomatine, D.P.; Schumann, G.J.-P. A Review of Low-Cost Space-Borne Data for Flood Modelling: Topography, Flood Extent and Water Level. Hydrol. Process. 2015, 29, 3368–3387. [Google Scholar] [CrossRef]
- Urone, P.P.; Hinrichs, R. 13.2 Thermal Expansion of Solids and Liquids. In College Physics 2e; Openstax: Houston, TX, USA, 2022. [Google Scholar]
- Steinhart, J.S.; Hart, S.R. Calibration Curves for Thermistors. Deep Sea Res. Oceanogr. Abstr. 1968, 15, 497–503. [Google Scholar] [CrossRef]
- Petts, G.E.; Bickerton, M.A. River Wissey: Linking Ecology and Hydrology; National Rivers Authority: Peterborough, UK, 1994; p. 105.
- Altman, D.G.; Bland, J.M. Measurement in Medicine: The Analysis of Method Comparison Studies. J. R. Stat. Soc. Ser. D Stat. 1983, 32, 307–317. [Google Scholar] [CrossRef]
- Giavarina, D. Understanding Bland Altman Analysis. Biochem. Med. 2015, 25, 141–151. [Google Scholar] [CrossRef]
- Gonzaga, B.A.; Alves, D.L.; Albuquerque, M.D.G.; Espinoza, J.M.D.A.; Almeida, L.P.; Weschenfelder, J. Development of a Low-Cost Ultrasonic Sensor for Groundwater Monitoring in Coastal Environments: Validation Using Field and Laboratory Observations. J. Coast. Res. 2020, 95, 1001–1005. [Google Scholar] [CrossRef]
- Webb, B.W.; Nobilis, F. Long-Term Changes in River Temperature and the Influence of Climatic and Hydrological Factors. Hydrol. Sci. J. 2007, 52, 74–85. [Google Scholar] [CrossRef]
- Tetzlaff, D.; Carey, S.K.; McNamara, J.P.; Laudon, H.; Soulsby, C. The Essential Value of Long-Term Experimental Data for Hydrology and Water Management. Water Resour. Res. 2017, 53, 2598–2604. [Google Scholar] [CrossRef]
- Laudon, H.; Sponseller, R.A. How Landscape Organization and Scale Shape Catchment Hydrology and Biogeochemistry: Insights from a Long-Term Catchment Study. WIREs Water 2018, 5, e1265. [Google Scholar] [CrossRef]
- Schoener, G. Time-Lapse Photography: Low-Cost, Low-Tech Alternative for Monitoring Flow Depth. J. Hydrol. Eng. 2018, 23, 06017007. [Google Scholar] [CrossRef]
- Dimitriadis, P.; Koutsoyiannis, D.; Iliopoulou, T.; Papanicolaou, P. A Global-Scale Investigation of Stochastic Similarities in Marginal Distribution and Dependence Structure of Key Hydrological-Cycle Processes. Hydrology 2021, 8, 59. [Google Scholar] [CrossRef]
- Hurst, H.E. Long-Term Storage Capacity of Reservoirs. Trans. Am. Soc. Civ. Eng. 1951, 116, 770–799. [Google Scholar] [CrossRef]
- Pearce, R.H.; Chadwick, M.A.; Francis, R. Experiential Learning in Physical Geography Using Arduino Low-Cost Environmental Sensors. J. Geogr. High. Educ. 2022, 48, 54–73. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part Name | Quantity | Cost/Item (£) | Total Cost (£) |
|---|---|---|---|
| Arduino pro mini 3.3 V | 1 | 4.90 | 4.90 |
| Micro SD card 1 GB | 1 | 4.28 | 4.28 |
| Real-time clock (RTC) module DS3234 | 1 | 20.10 | 20.10 |
| Micro SD card holder 3.3 V | 1 | 0.13 | 0.13 |
| 10 kΩ thermistor | 1 | 3.94 | 3.94 |
| MPX5050DP differential pressure sensor 50 kPa | 1 | 23.66 | 23.66 |
| PCB screw terminals (2-terminal) | 12 | 0.21 | 2.52 |
| Battery holder, coil spring (4 × AA) | 1 | 1.26 | 1.26 |
| AA Batteries | 4 | 0.28 | 1.12 |
| Battery snap connector | 1 | 0.69 | 0.69 |
| 4-core cable (~1.5 m) | 1 | 0.75 | 0.75 |
| Cable glands (4 mm minimum, IP68) | 2 | 1.05 | 2.10 |
| Rubber tubing (3 mm × >1 m) | 1 | 0.77 | 0.77 |
| Small enclosure | 1 | 3.27 | 3.27 |
| Larger enclosure | 1 | 13.10 | 13.10 |
| Epoxy (250 g) | 1 | 6.83 | 6.83 |
| 10 kΩ 0.4 W ± 1% resistor | 2 | 0.13 | 0.26 |
| 4.7 kΩ 2 W ± 5% resistor | 1 | 0.108 | 0.108 |
| 5 V step up regulator | 1 | 12.80 | 12.80 |
| Insulated wire | 1 | 0.29 | 0.29 |
| CH340 USB to TTL serial adapter | 1 | 2.99 | 2.99 |
| Jumper wires—connected 6″ (F/F, 20 pack) | 1 | 1.72 | 1.72 |
| Arduino Pro Mini V1 PCB Design | 1 | 5.47 | 5.47 |
| Total | 113.05 |
| Part Name | Label | Quantity | Cost/Item (£) | Total Cost (£) |
|---|---|---|---|---|
| Angle iron (40 mm × 40 mm × 3 mm) 1 m | A | 1 | 4.17 | 4.17 |
| M10 steel threaded bar (1000 mm) | B | 2 | 3.40 | 6.80 |
| M10 × 2.5 mm washers | C | 2 | 0.11 | 0.22 |
| M10 nuts | D | 2 | 0.06 | 0.12 |
| M10 joining nuts | E | 1 | 0.57 | 0.57 |
| M6 U-bolts | F | 2 | 1.04 | 2.08 |
| M6 hex nuts | G | 4 | 0.08 | 0.33 |
| M6 × 1.6 mm washers | H | 4 | 0.07 | 0.27 |
| Angle aluminium (12.7 mm × 12.7 mm × 3.2 mm) 20 cm | I | 1 | 0.36 | 0.36 |
| Angle aluminium (101.6 mm × 101.6 mm × 3.2 mm) 20 cm | J | 1 | 4.80 | 4.80 |
| M8 bolts | K | 2 | 0.11 | 0.22 |
| M8 × 2 mm washers * | L | 2 | 0.09 | 0.18 |
| M4 nuts * | M | 2 | 0.05 | 0.10 |
| M4 × 1 mm washers * | N | 2 | 0.04 | 0.08 |
| Total | 20.30 |
| Performance Metric | Arduino-Based Logger | Industrial Comparison * | ||
| Operating voltage | 5 V | NA | ||
| Power supply | 4 × AA batteries | NA | ||
| Estimated battery life | 4.5 months at 1 reading per hour | 5 years at 1 reading per min. | ||
| Memory | ~33.3 million ^ | 75,000 data points | ||
| Cost | £113.05 | £408 | ||
| Clock accuracy | ±3.5 ppm from −40 to +85 °C (±184 min/yr) | ±1 min/year (−20 to 80 °C) (0.0190258 ppm) | ||
| Sensor Specific Metric | Water Depth | Temperature | Water Depth | Temperature |
| Accuracy | ±0.5 cm | ±0.1 °C | ||
| Data range | <5.09 m | 0 to +70 °C | <5 m | −20 to 80 °C |
| Arduino-Based Logger | Industrial Comparison | |||
|---|---|---|---|---|
| Water Depth (cm) | Temperature (°C) | Water Depth (cm) | Temperature (°C) | |
| Mean | 48.01 | 8.82 | 49.31 | 8.02 |
| Median | 44.99 | 8.69 | 46.2 | 7.8 |
| SD | 15.72 | 3.12 | 15.34 | 3.13 |
| CV (%) | 32.74 | 35.37 | 31.01 | 38.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pearce, R.H.; Chadwick, M.A.; Main, B.; Chan, K.; Sayer, C.D.; Patmore, I.R. Low-Cost Approach to an Instream Water Depth Sensor Construction Using Differential Pressure Sensors and Arduino Microcontrollers. Sensors 2024, 24, 2488. https://doi.org/10.3390/s24082488
Pearce RH, Chadwick MA, Main B, Chan K, Sayer CD, Patmore IR. Low-Cost Approach to an Instream Water Depth Sensor Construction Using Differential Pressure Sensors and Arduino Microcontrollers. Sensors. 2024; 24(8):2488. https://doi.org/10.3390/s24082488
Chicago/Turabian StylePearce, Reagan H., Michael A. Chadwick, Bruce Main, Kris Chan, Carl D. Sayer, and Ian R. Patmore. 2024. "Low-Cost Approach to an Instream Water Depth Sensor Construction Using Differential Pressure Sensors and Arduino Microcontrollers" Sensors 24, no. 8: 2488. https://doi.org/10.3390/s24082488
APA StylePearce, R. H., Chadwick, M. A., Main, B., Chan, K., Sayer, C. D., & Patmore, I. R. (2024). Low-Cost Approach to an Instream Water Depth Sensor Construction Using Differential Pressure Sensors and Arduino Microcontrollers. Sensors, 24(8), 2488. https://doi.org/10.3390/s24082488