
Comparative Study on Simulated Outdoor Navigation for Agricultural Robots

 , and
, and 
Abstract
:1. Introduction
- A new comparative study for autonomous navigation including the behavior cloning method is proposed.
- We tested popular SLAM algorithms developed for indoor environments in the agricultural outdoor environment and validated their performance.
- So far, to the best of the author’s knowledge, there is no comparative analyses of SLAM algorithms with DNN-based BC techniques together.
2. Related Work
2.1. SLAM Comparative Study
2.2. Behavior Cloning
3. Methods
3.1. SLAM Algorithms
3.1.1. Laser-Based Mapping
Gmapping
Cartographer
3.1.2. Vision-Based Mapping
RTAB-Map
3.1.3. Laser-Based Localization
Adaptive Monte Carlo Localization
3.1.4. Vision-Based Localization
RTAB-Map Localization
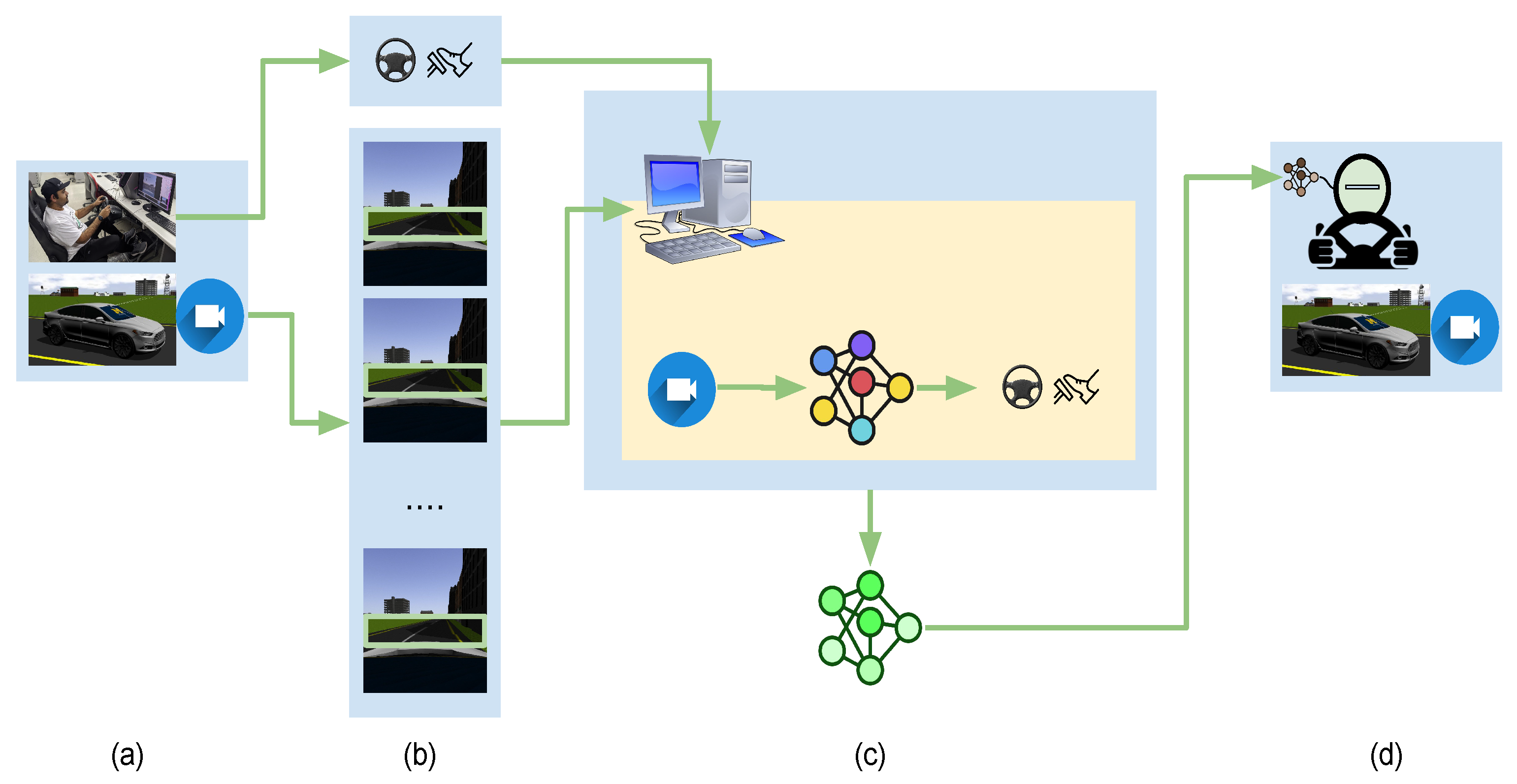
3.2. Behavior Cloning
3.2.1. Data Collection
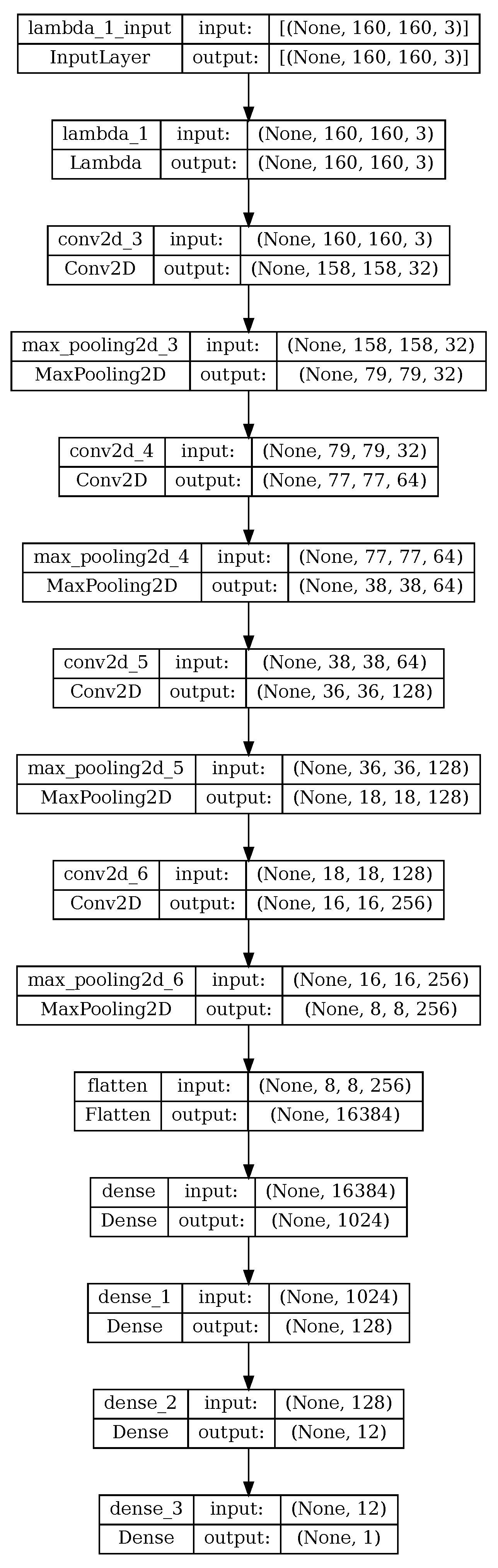
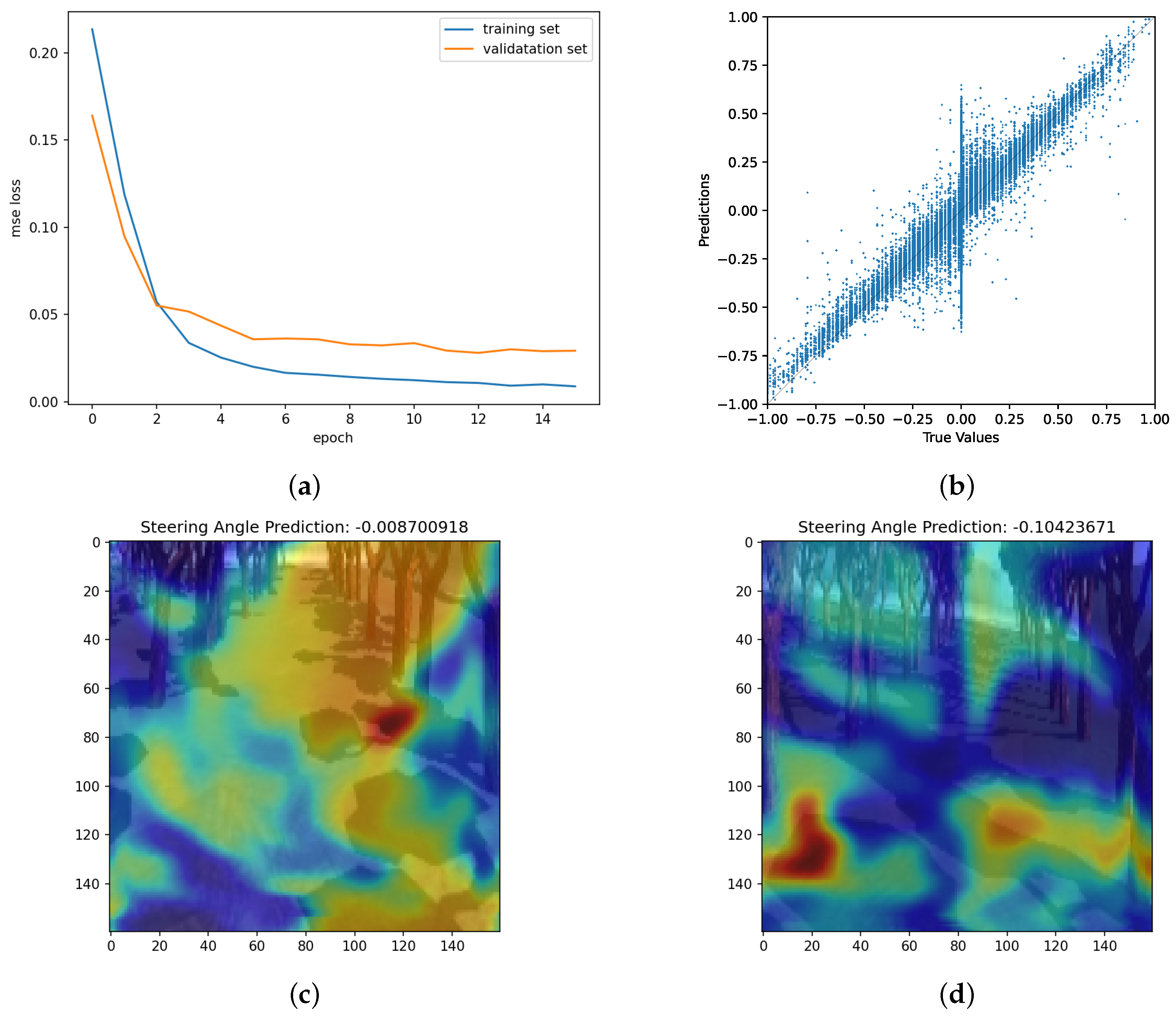
3.2.2. Neural Network
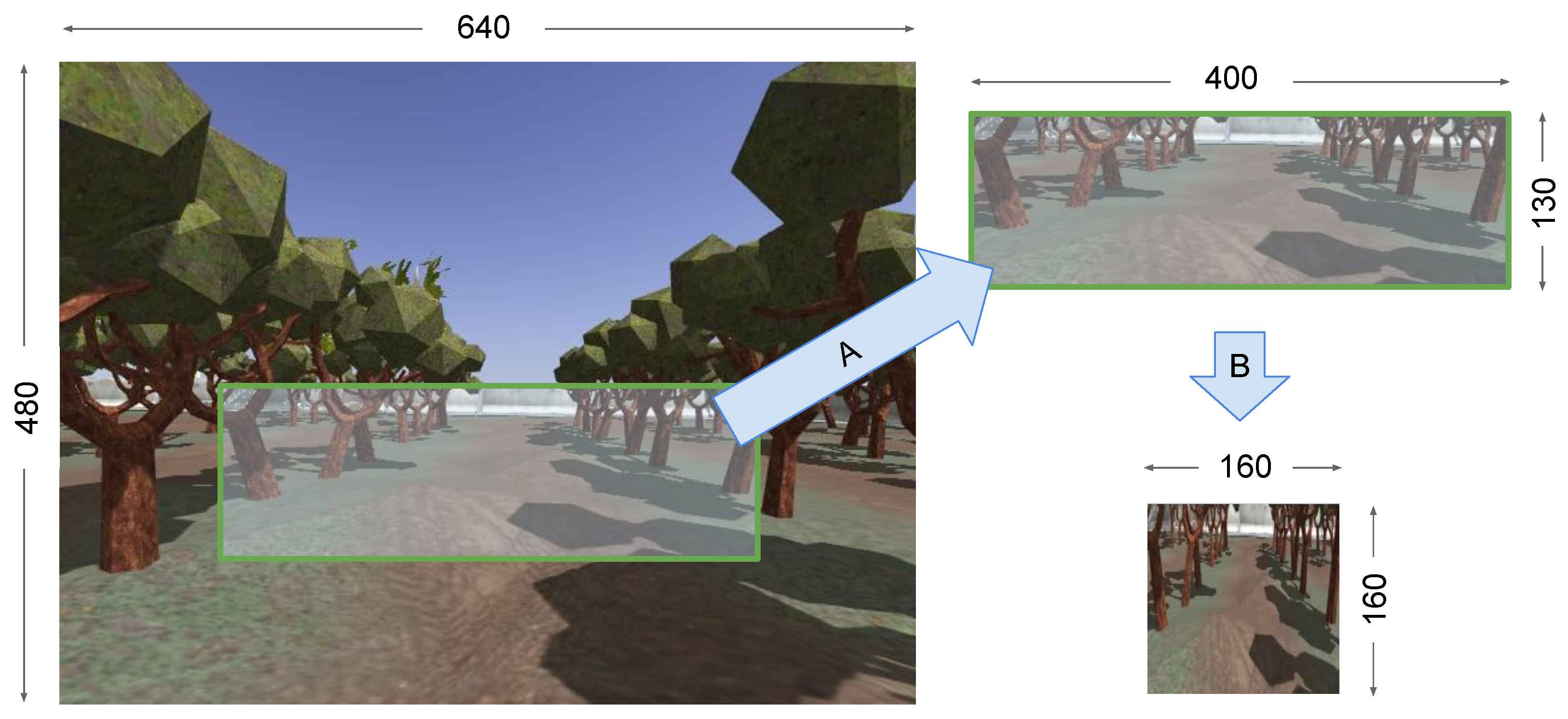
3.2.3. Data Normalization
3.2.4. Training
3.2.5. Performance Metrics
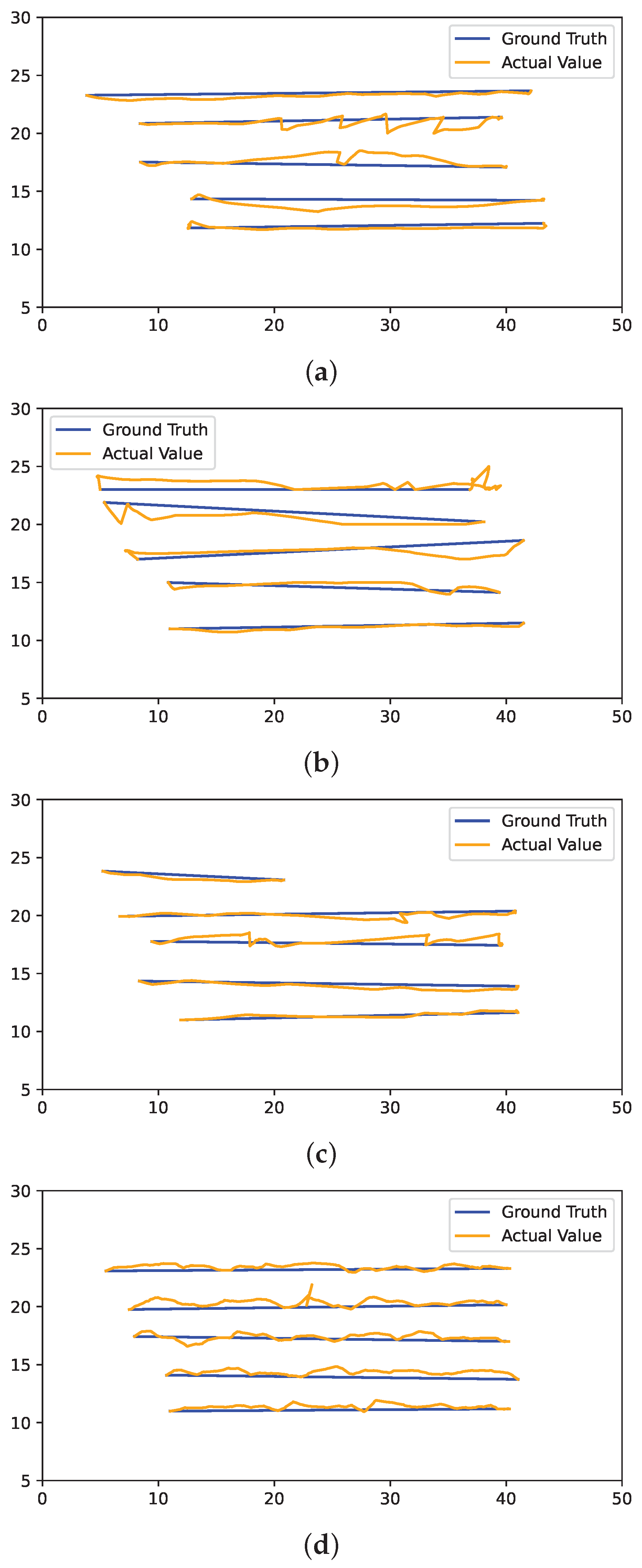
Driving Deviation
Completion Time
Autonomy
4. Experimental Setup
4.1. Environment
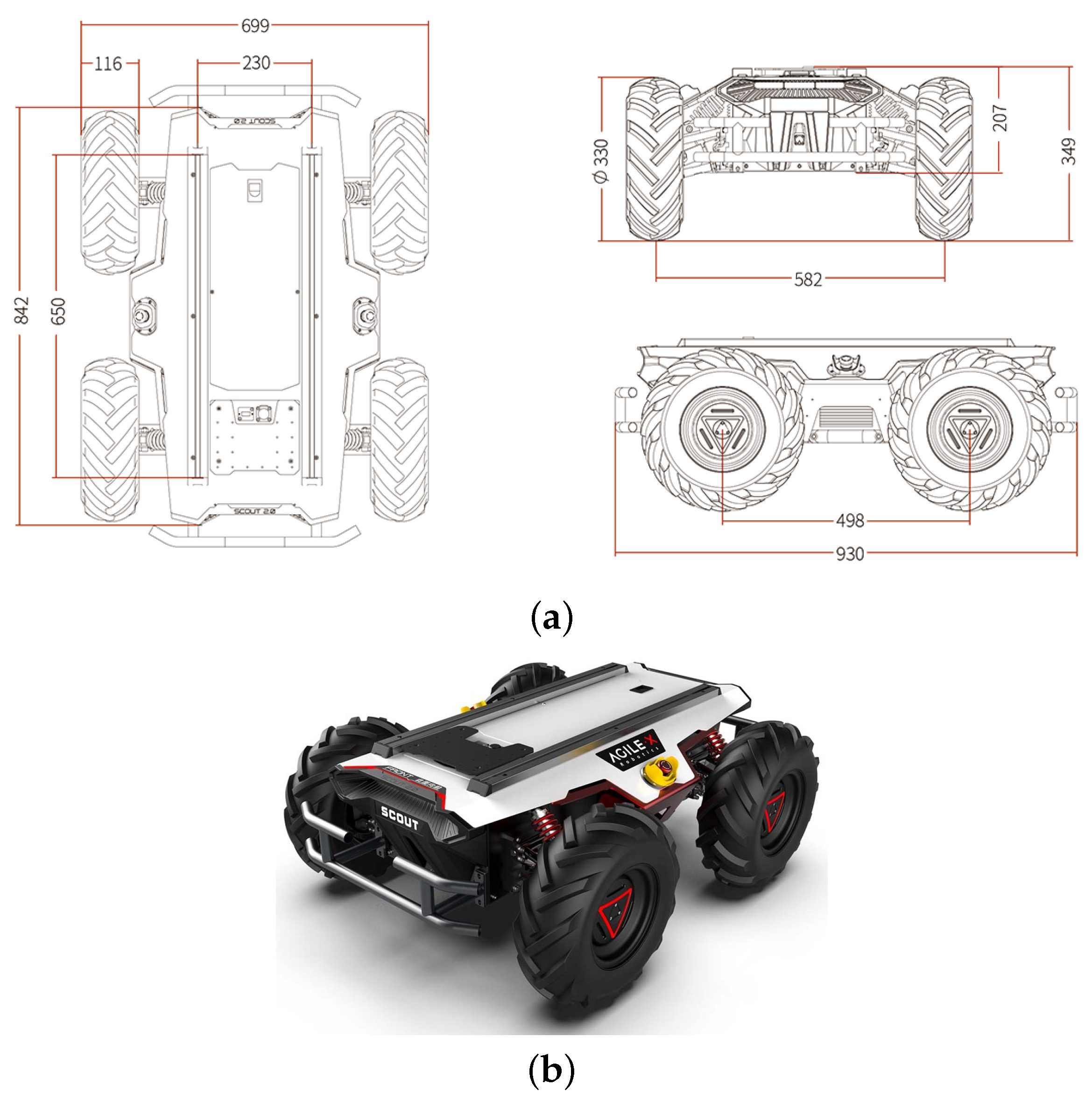
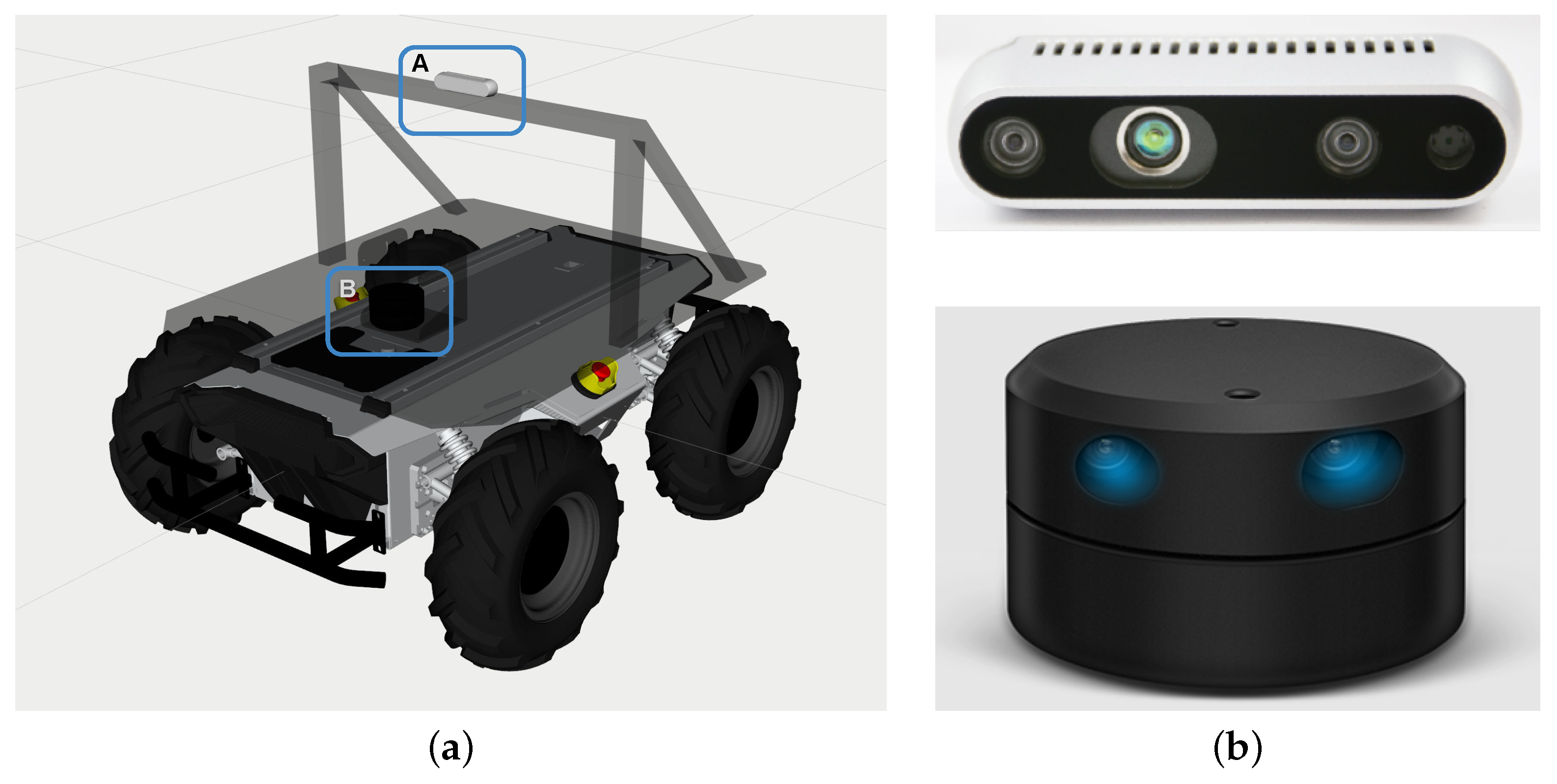
4.1.1. Scout 2.0
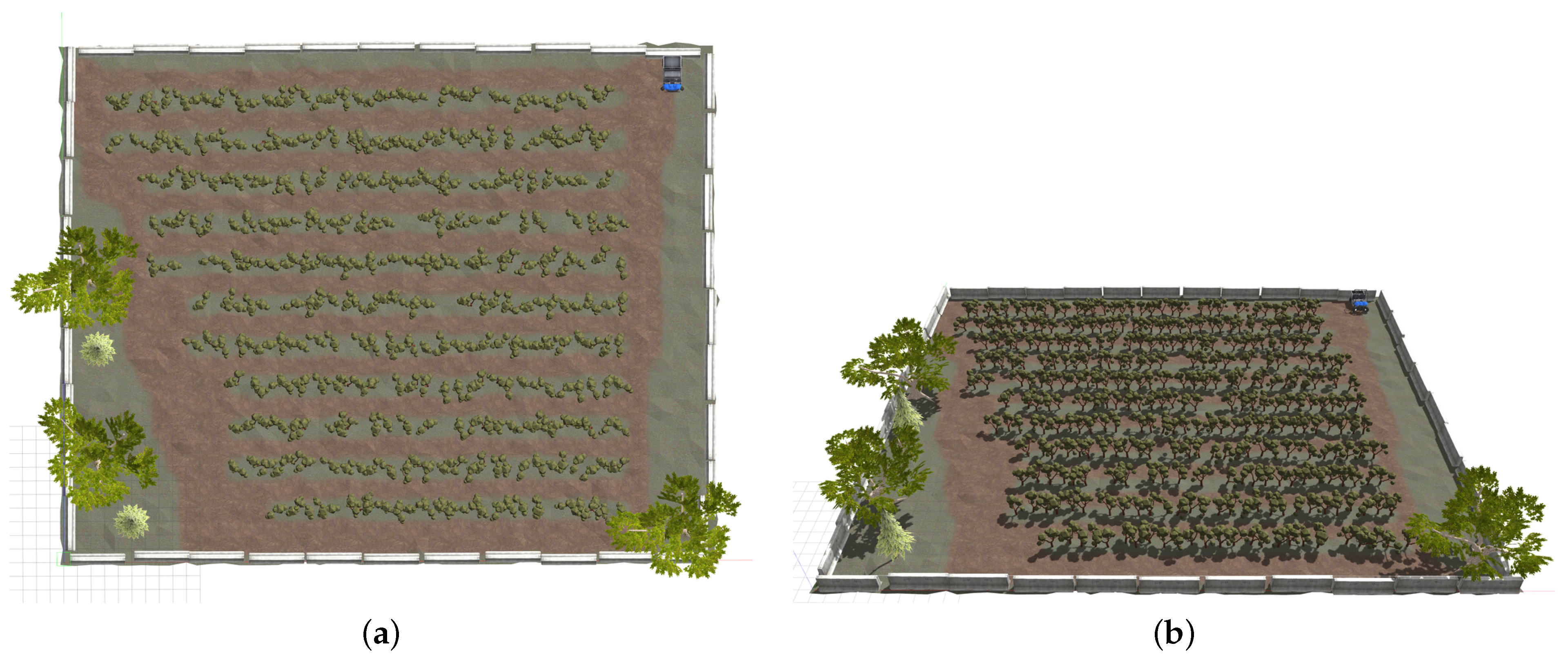
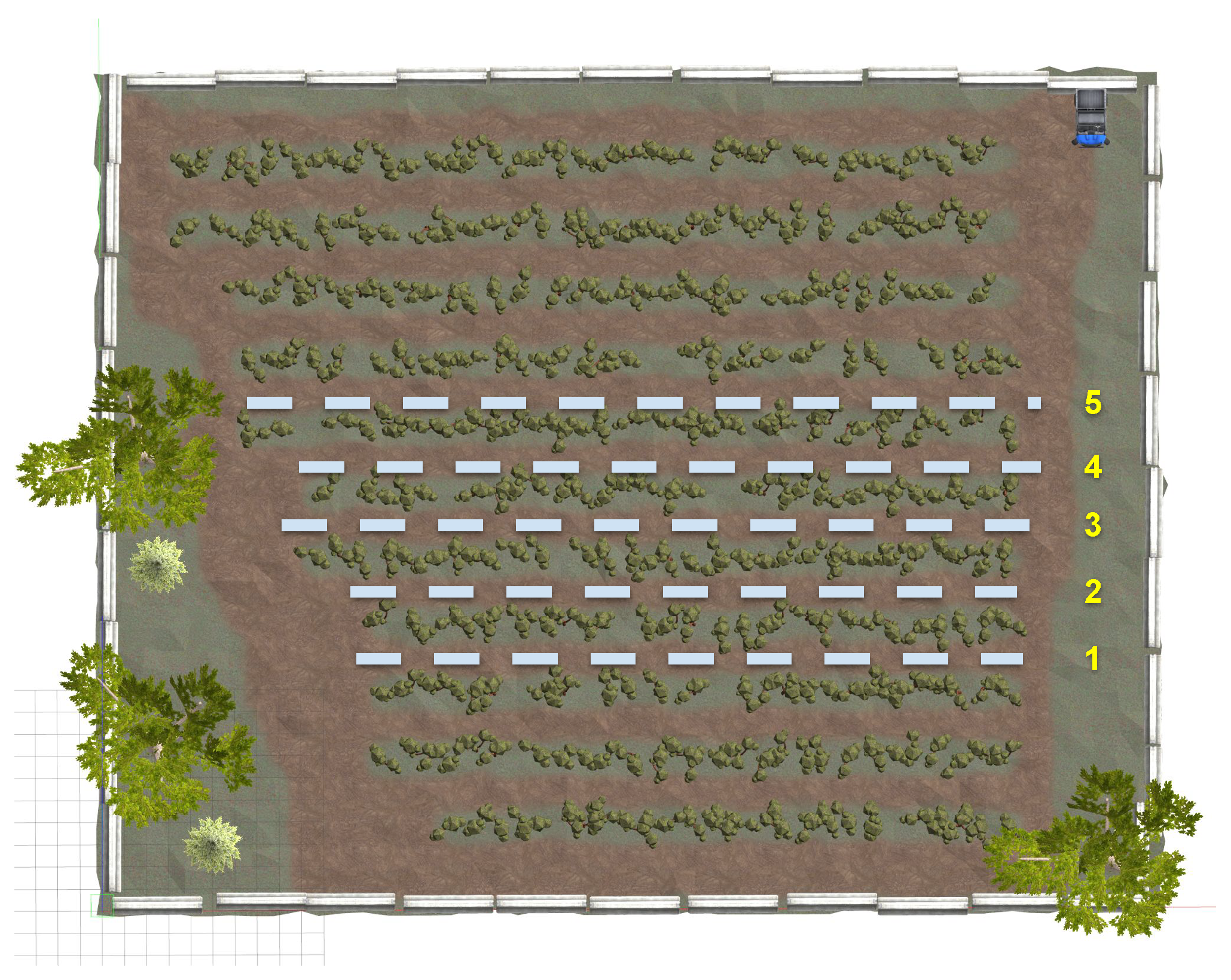
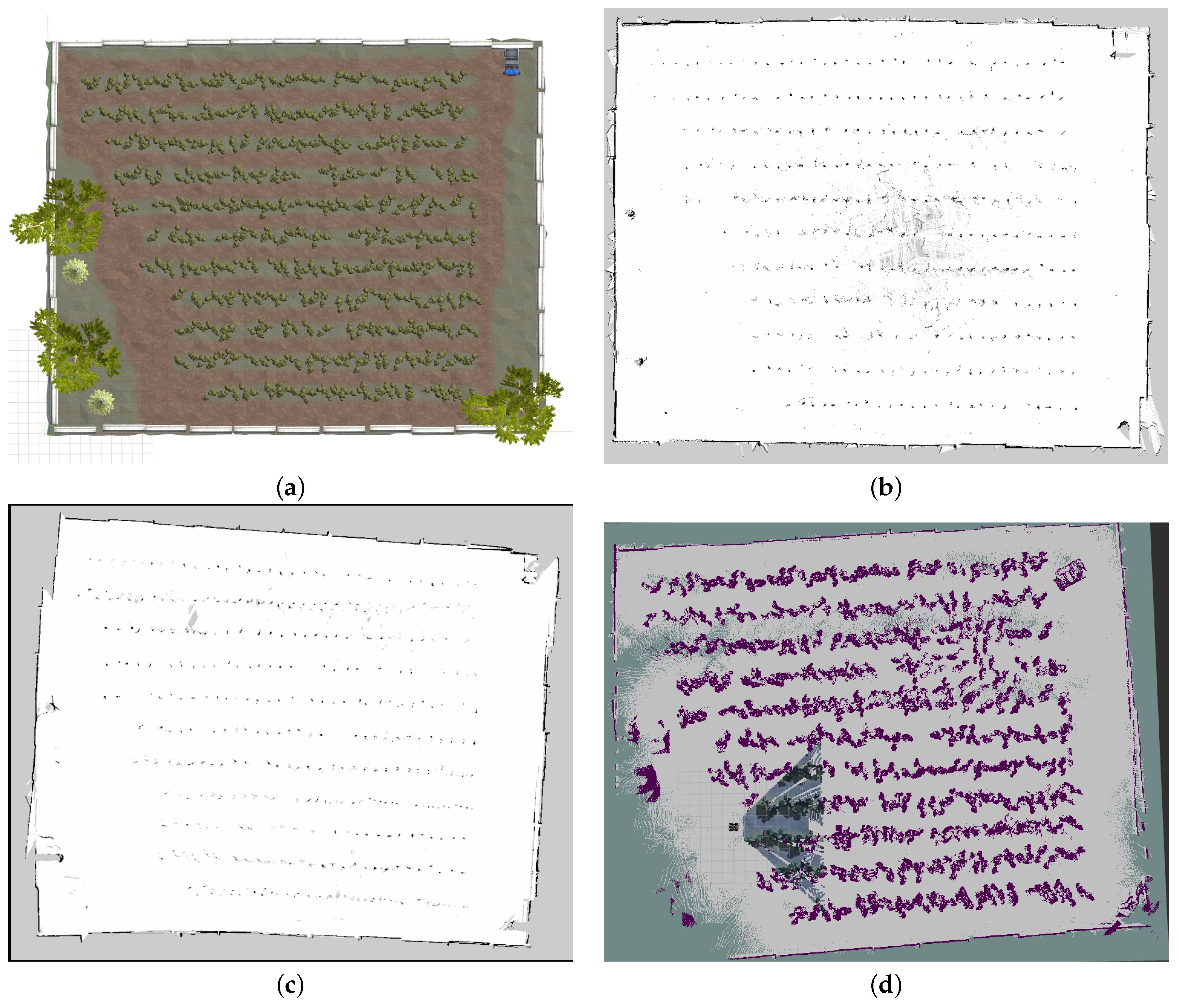
4.1.2. Orchard Farm
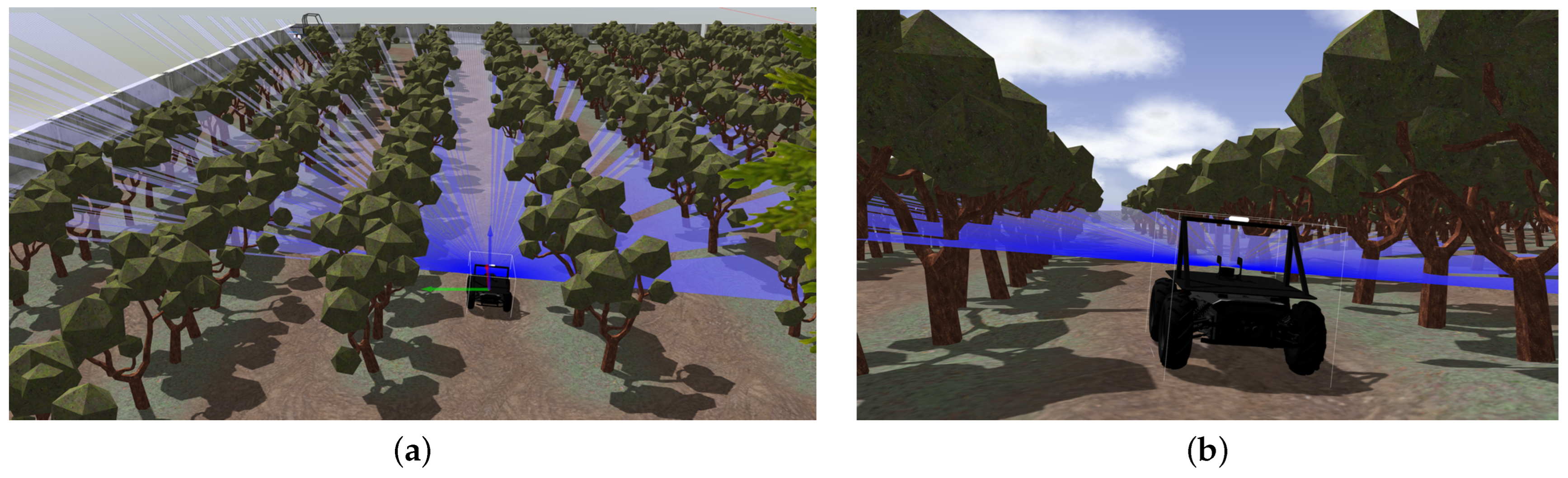
4.2. Simulation Environment
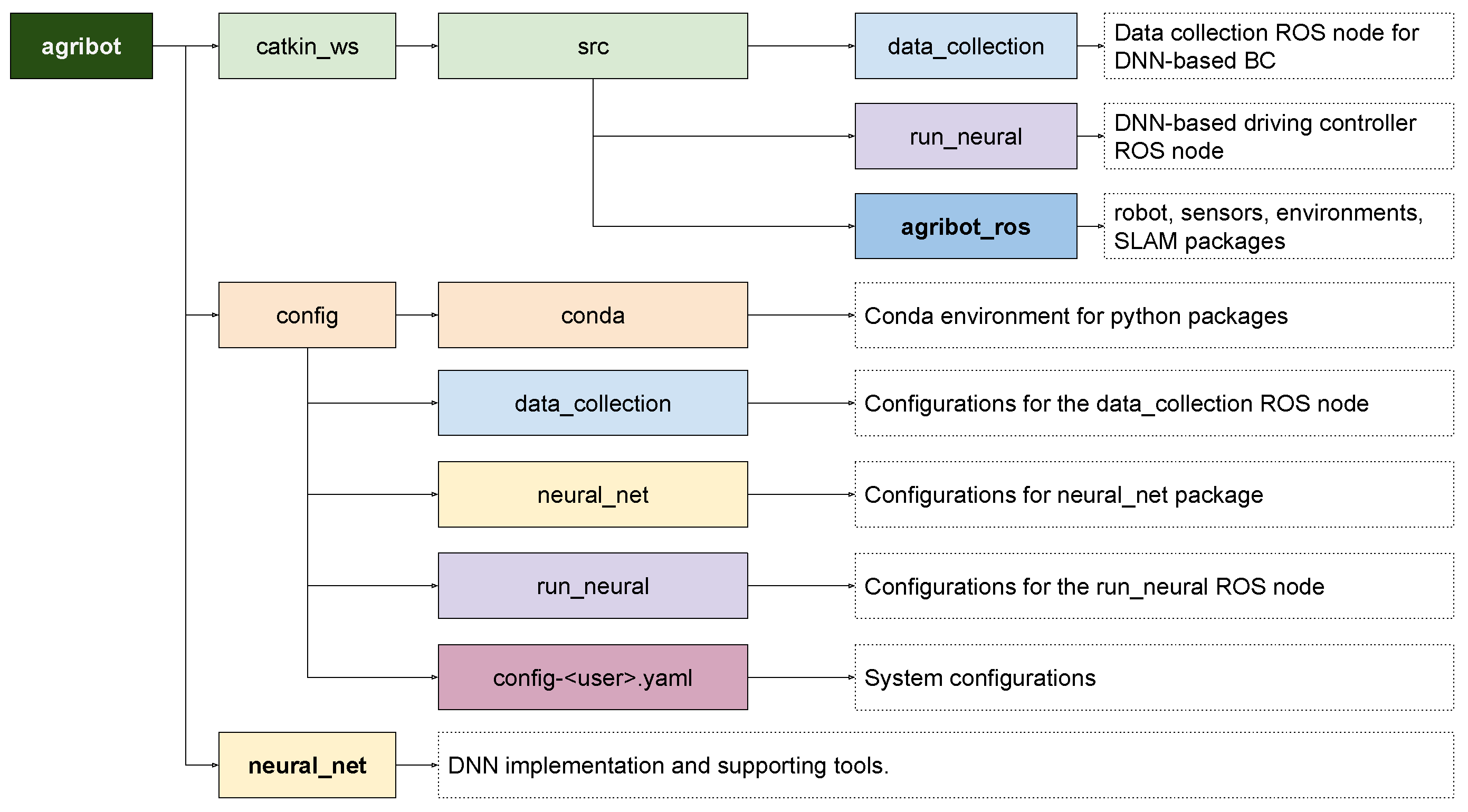
4.3. Implementation
4.3.1. Agricultural Robot
4.3.2. SLAM Algorithms
4.3.3. DNN-Based BC
5. Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SLAM | Simultaneous Localization and Mapping |
| DNN | Deep Neural Network |
| CNN | Convolutional Neural Network |
| BC | Behavior Cloning |
| AMCL | Adaptive Monte Carlo Localization |
| ROS | Robot Operating System |
References
- Talaviya, T.; Shah, D.; Patel, N.; Yagnik, H.; Shah, M. Implementation of artificial intelligence in agriculture for optimisation of irrigation and application of pesticides and herbicides. Artif. Intell. Agric. 2020, 4, 58–73. [Google Scholar] [CrossRef]
- Karfakis, P.T.; Couceiro, M.S.; Portugal, D. NR5G-SAM: A SLAM Framework for Field Robot Applications Based on 5G New Radio. Sensors 2023, 23, 5354. [Google Scholar] [CrossRef] [PubMed]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved Techniques for Grid Mapping With Rao-Blackwellized Particle Filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar] [CrossRef]
- Labbé, M.; Michaud, F. RTAB-Map as an open-source lidar and visual simultaneous localization and mapping library for large-scale and long-term online operation. J. Field Robot. 2019, 36, 416–446. [Google Scholar] [CrossRef]
- Bojarski, M.; Del Testa, D.; Dworakowski, D.; Firner, B.; Flepp, B.; Goyal, P.; Jackel, L.D.; Monfort, M.; Muller, U.; Zhang, J.; et al. End to End Learning for Self-Driving Cars. arXiv 2016, arXiv:1604.07316. [Google Scholar] [CrossRef]
- Kim, D.; Khalil, A.; Nam, H.; Kwon, J. OPEMI: Online Performance Evaluation Metrics Index for Deep Learning-Based Autonomous Vehicles. IEEE Access 2023, 11, 16951–16963. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, B.; Zhou, J.; Yan, Y.; Tian, G.; Gu, B. Recent developments and applications of simultaneous localization and mapping in agriculture. J. Field Robot. 2022, 39, 956–983. [Google Scholar] [CrossRef]
- Kasar, A. Benchmarking and Comparing Popular Visual SLAM Algorithms. arXiv 2018, arXiv:1811.09895. [Google Scholar] [CrossRef]
- Computer Vision Group-Datasets. Available online: https://cvg.cit.tum.de/data/datasets (accessed on 5 February 2024).
- Garigipati, B.; Strokina, N.; Ghabcheloo, R. Evaluation and comparison of eight popular Lidar and Visual SLAM algorithms. In Proceedings of the 2022 25th International Conference on Information Fusion, FUSION, Linköping, Sweden, 4–7 July 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- ROS: Home. Available online: https://www.ros.org/ (accessed on 5 February 2024).
- Liu, X.; Lin, Y.; Huang, H.; Qiu, M. Comparative Analysis of Three Kinds of Laser SLAM Algorithms. In Proceedings of the Algorithms and Architectures for Parallel Processing: 20th International Conference (ICA3PP 2020), New York, NY, USA, 2–4 October 2020; Proceedings, Part II. Springer: Berlin/Heidelberg, Germany, 2020; pp. 463–476. [Google Scholar] [CrossRef]
- Li, Z.X.; Cui, G.H.; Li, C.L.; Zhang, Z.S. Comparative Study of Slam Algorithms for Mobile Robots in Complex Environment. In Proceedings of the 2021 6th International Conference on Control, Robotics and Cybernetics (CRC), Shanghai, China, 9–11 October 2021; pp. 74–79. [Google Scholar] [CrossRef]
- Ibragimov, I.Z.; Afanasyev, I.M. Comparison of ROS-based visual SLAM methods in homogeneous indoor environment. In Proceedings of the 2017 14th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, A.; Zhong, Y. An Indoor Mobile Robot 2D Lidar Mapping Based on Cartographer-Slam Algorithm. Taiwan Ubiquitous Inf. 2022, 7, 795–804. [Google Scholar]
- Tiozzo Fasiolo, D.; Scalera, L.; Maset, E.; Gasparetto, A. Experimental Evaluation and Comparison of LiDAR SLAM Algorithms for Mobile Robotics. In Proceedings of the Advances in Italian Mechanism Science; Mechanisms and Machine Science. Niola, V., Gasparetto, A., Quaglia, G., Carbone, G., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 795–803. [Google Scholar] [CrossRef]
- Alam Khan, M.S.; Hussian, D.; Khan, S.; Rehman, F.U.; Bin Aqeel, A.; Khan, U.S. Implementation of SLAM by using a Mobile Agribot in a Simulated Indoor Environment in Gazebo. In Proceedings of the 2021 International Conference on Robotics and Automation in Industry (ICRAI), Rawalpindi, Pakistan, 26–27 October 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Ratul, M.T.A.; Mahmud, M.S.A.; Abidin, M.S.Z.; Ayop, R. Design and Development of GMapping based SLAM Algorithm in Virtual Agricultural Environment. In Proceedings of the 2021 11th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–28 August 2021; pp. 109–113. [Google Scholar] [CrossRef]
- Habibie, N.; Nugraha, A.M.; Anshori, A.Z.; Ma’sum, M.A.; Jatmiko, W. Fruit mapping mobile robot on simulated agricultural area in Gazebo simulator using simultaneous localization and mapping (SLAM). In Proceedings of the 2017 International Symposium on Micro-NanoMechatronics and Human Science (MHS), Nagoya, Japan, 3–6 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Pomerleau, D.A. ALVINN: An autonomous land vehicle in a neural network. In NIPS’88: Proceedings of the 1st International Conference on Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 1988; pp. 305–313. [Google Scholar]
- DAVE: Autonomous Off-Road Vehicle Control Using End-to-End Learning. Available online: https://cs.nyu.edu/~yann/research/dave/ (accessed on 5 February 2024).
- Chen, Z.; Huang, X. End-to-end learning for lane keeping of self-driving cars. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2027; pp. 1856–1860. [Google Scholar] [CrossRef]
- Bojarski, M.; Yeres, P.; Choromanska, A.; Choromanski, K.; Firner, B.; Jackel, L.; Muller, U. Explaining How a Deep Neural Network Trained with End-to-End Learning Steers a Car. arXiv 2017, arXiv:1704.07911. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, L.; Tian, B.; Tian, W.; Li, L.; Cao, D. End-to-End Autonomous Driving: An Angle Branched Network Approach. IEEE Trans. Veh. Technol. 2019, 68, 11599–11610. [Google Scholar] [CrossRef]
- Wu, T.; Luo, A.; Huang, R.; Cheng, H.; Zhao, Y. End-to-End Driving Model for Steering Control of Autonomous Vehicles with Future Spatiotemporal Features. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 950–955, ISBN 9781728140049. [Google Scholar] [CrossRef]
- Thrun, S. Learning Occupancy Grid Maps with Forward Sensor Models. Auton. Robot. 2003, 15, 111–127. [Google Scholar] [CrossRef]
- Introduction to Loop Closure Detection in SLAM. Available online: https://www.thinkautonomous.ai/blog/loop-closure/ (accessed on 5 February 2024).
- TORO-Tree-Based Network Optimizer. Available online: https://openslam-org.github.io/toro.html (accessed on 5 February 2024).
- Chen, W.; Huang, T.; Maalla, A. Research on Adaptive Monte Carlo Location Method Based on Fusion Posture Estimation. In Proceedings of the 2019 IEEE 3rd Advanced InformationManagement, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 1209–1213. [Google Scholar] [CrossRef]
- AgileX Scout Unmanned Ground Vehicle 2.0. Available online: https://www.trossenrobotics.com/scout-2-0 (accessed on 2 April 2024).
- Clearpath Additional Simulation Worlds. Available online: https://github.com/clearpathrobotics/cpr_gazebo (accessed on 2 April 2024).
- YDLIDAR G4|Focus on Lidar Sensor Solutions. Available online: https://www.ydlidar.com/products/view/3.html (accessed on 2 April 2024).
- Depth Camera D435i-Intel® RealSense™ Depth and Tracking Cameras. Available online: https://www.intelrealsense.com/depth-camera-d435i/ (accessed on 2 April 2024).
- Gazebo. Available online: https://gazebosim.org/home (accessed on 2 April 2024).
- Kwon, J. AgriBot: Intelligent Agricultural Robot. Available online: https://github.com/jrkwon/agribot (accessed on 2 April 2024).
- Kwon, J. ROS Packages for Intelligent Agricultural Robot. Available online: https://github.com/jrkwon/agribot_ros (accessed on 2 April 2024).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Sensors | Map | Navigation |
|---|---|---|---|
| GMapping [3] | LiDAR | Yes | AMCL |
| Cartographer [4] | LiDAR | Yes | AMCL |
| RTAB-Map [5] | Camera | Yes | RTAB-Map |
| DNN-based BC [6] | Camera | No | DNN |
| Algorithms | Driving Deviation: (m) ↓ | Completion Time: (s) ↓ | Autonomy: ↑ | |||
|---|---|---|---|---|---|---|
| LR | RL | LR | RL | LR | RL | |
| GMapping | 35.17 (±0.36) | 35.03 (±0.51) | 99.97 (±18.24) | 99.88 (±34.20) | 98.79% (±1) | 100.00% (±0) |
| Cartographer | 35.25 (±0.50) | 35.35 (±0.72) | 133.17 (±63.60) | 96.16 (±29.70) | 96.26% (±3) | 95.00% (±4) |
| RTAB-Map | 34.62 (±0.41) | 34.29 (±0.40) | 99.47 (±37.32) | 94.16 (±32.79) | 96.38% (±3) | 92.35% (±6) |
| DNN-based BC | 34.45 (±0.25) | 34.22 (±0.41) | 237.99 (±16.19) | 239.54 (±19.36) | 100.00% (±0) | 100.00% (±0) |
| Algorithms | Normalized DD: ↓ | Normalized CT: ↓ | Autonomy: ↑ | |||
|---|---|---|---|---|---|---|
| LR | RL | LR | RL | LR | RL | |
| GMapping | 0.90 | 0.71 | 0.004 | 0.04 | 98.79% | 100.00% |
| Cartographer | 1.00 | 1.00 | 0.24 | 0.01 | 96.26% | 95.00% |
| RTAB-Map | 0.21 | 0.06 | 0.00 | 0.00 | 96.38% | 92.35% |
| DNN-based BC | 0.00 | 0.00 | 1.00 | 1.00 | 100.00% | 100.00% |
| Scenario | Weights () | Algorithms | Weighted Performance: P ↑ |
|---|---|---|---|
| Precision | 0.85, 0.075, 0.075 | Gmapping | 0.23 |
| Cartographer | 0.13 | ||
| RTAB-Map | 0.87 | ||
| DNN-based BC | 0.92 | ||
| Speed | 0.075, 0.85, 0.075 | Gmapping | 0.93 |
| Cartographer | 0.72 | ||
| RTAB-Map | 0.96 | ||
| DNN-based BC | 0.15 | ||
| Autonomy | 0.075, 0.075, 0.85 | Gmapping | 0.92 |
| Cartographer | 0.87 | ||
| RTAB-Map | 0.83 | ||
| DNN-based BC | 0.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khanzada, F.K.; Delavari, E.; Jeong, W.; Cho, Y.S.; Kwon, J. Comparative Study on Simulated Outdoor Navigation for Agricultural Robots. Sensors 2024, 24, 2487. https://doi.org/10.3390/s24082487
Khanzada FK, Delavari E, Jeong W, Cho YS, Kwon J. Comparative Study on Simulated Outdoor Navigation for Agricultural Robots. Sensors. 2024; 24(8):2487. https://doi.org/10.3390/s24082487
Chicago/Turabian StyleKhanzada, Feeza Khan, Elahe Delavari, Woojin Jeong, Young Seek Cho, and Jaerock Kwon. 2024. "Comparative Study on Simulated Outdoor Navigation for Agricultural Robots" Sensors 24, no. 8: 2487. https://doi.org/10.3390/s24082487
APA StyleKhanzada, F. K., Delavari, E., Jeong, W., Cho, Y. S., & Kwon, J. (2024). Comparative Study on Simulated Outdoor Navigation for Agricultural Robots. Sensors, 24(8), 2487. https://doi.org/10.3390/s24082487