


An Autocollimator Axial Measurement Method Based on the Strapdown Inertial Navigation System

Abstract
:1. Introduction
2. Methodologies
2.1. System Composition
2.2. Measurement Modeling
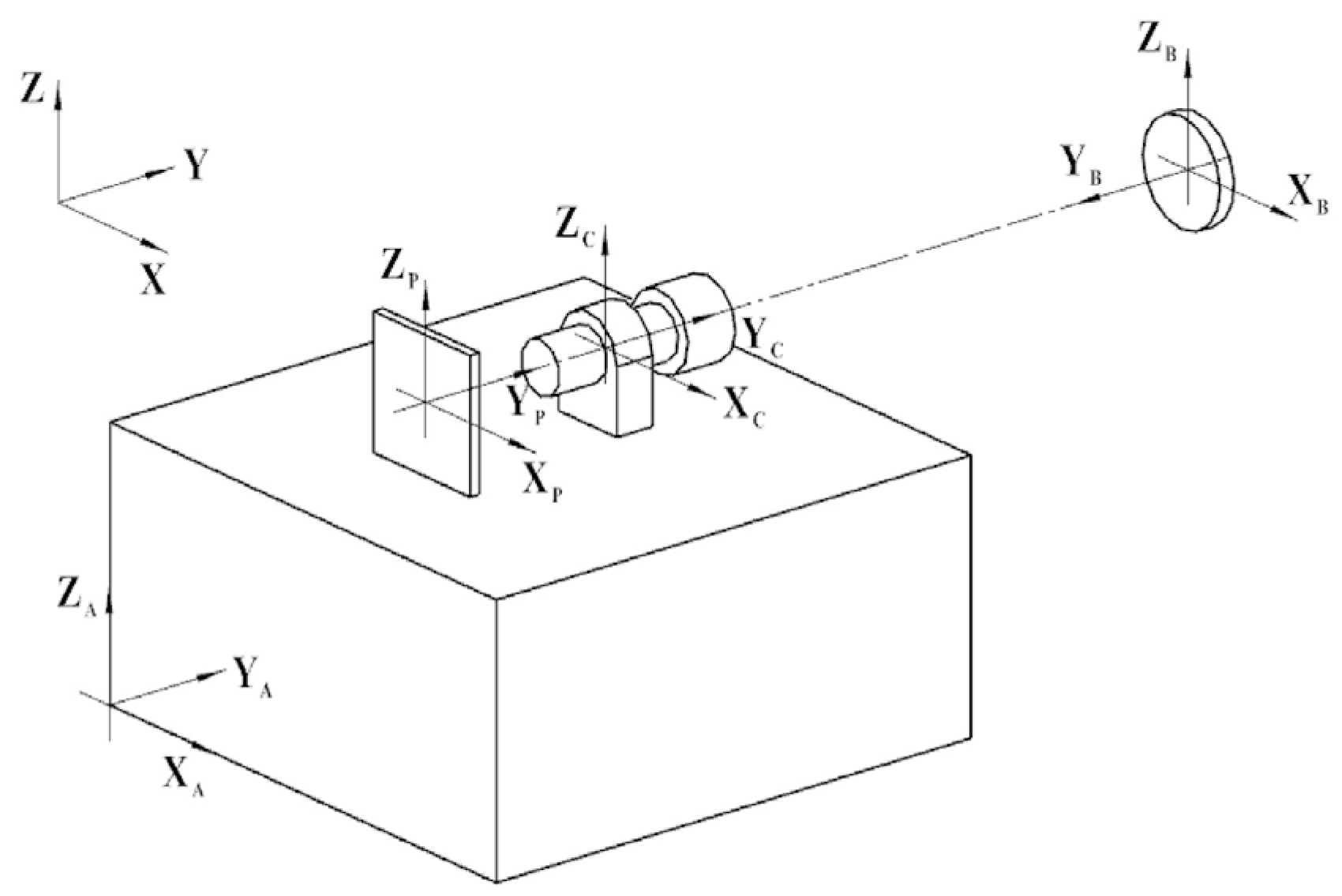
2.2.1. Coordinate System Establishment
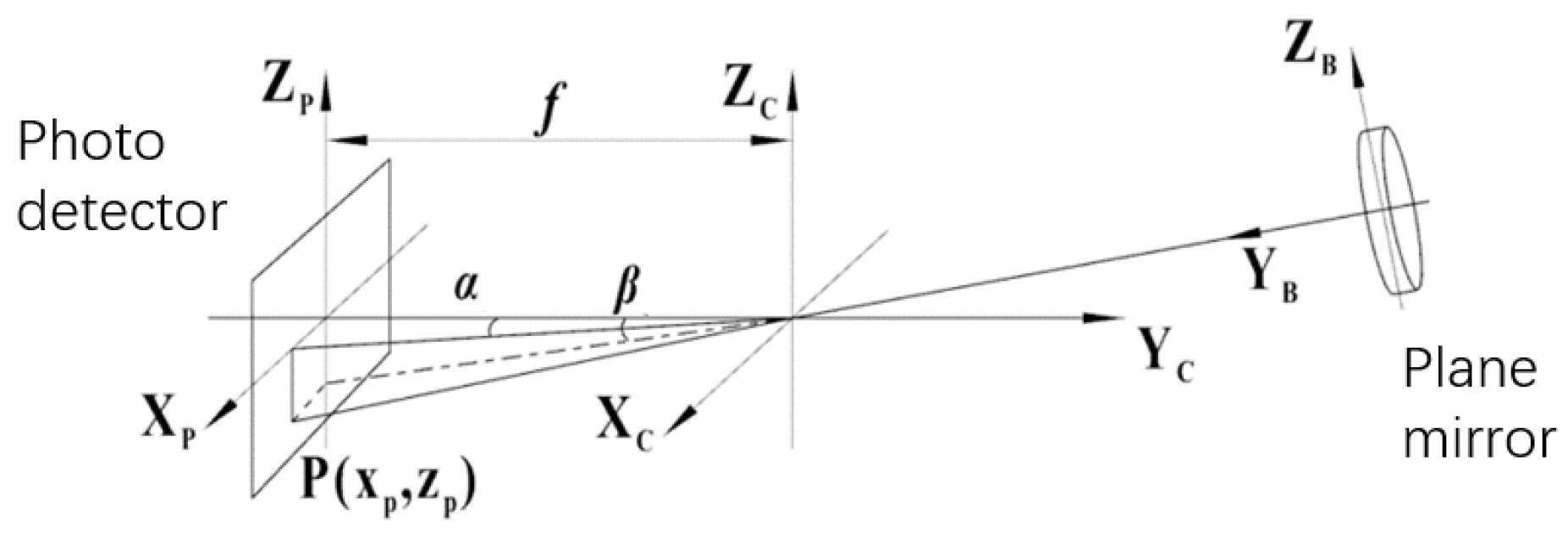
2.2.2. Measurement Modeling of the Autocollimator
2.2.3. Measurement Modeling of the SINS
- Yaw angle, αA: the horizontal angle between the projection of the YA-axis onto the horizontal plane and the actual north direction;
- Pitch angle, βA: the angle between the YA-axis in the vertical projection plane and the horizontal plane;
- Roll angle, γA: the angle between the XA-axis in the vertical projection plane and the horizontal plane.

2.3. Measurement Error Analysis
2.3.1. Installation Errors
2.3.2. Focal Length Errors
2.3.3. Pixel Errors
2.3.4. SINS Measurement Errors
2.4. Experiments
- The installation error was taken as γ = ±0.003°;
- The focal length error was taken as ±0.05 mm;
- The CMOS sensor measurement error was taken as ±0.1 pixel;
- The SINS measurement error was taken as ±0.001° in yaw, pitch, and roll;
- The parallel light pipes had a measurement accuracy of ±0.2″ in yaw and pitch;
- The roll adjustment table had a ±15° adjustment range.
3. Results
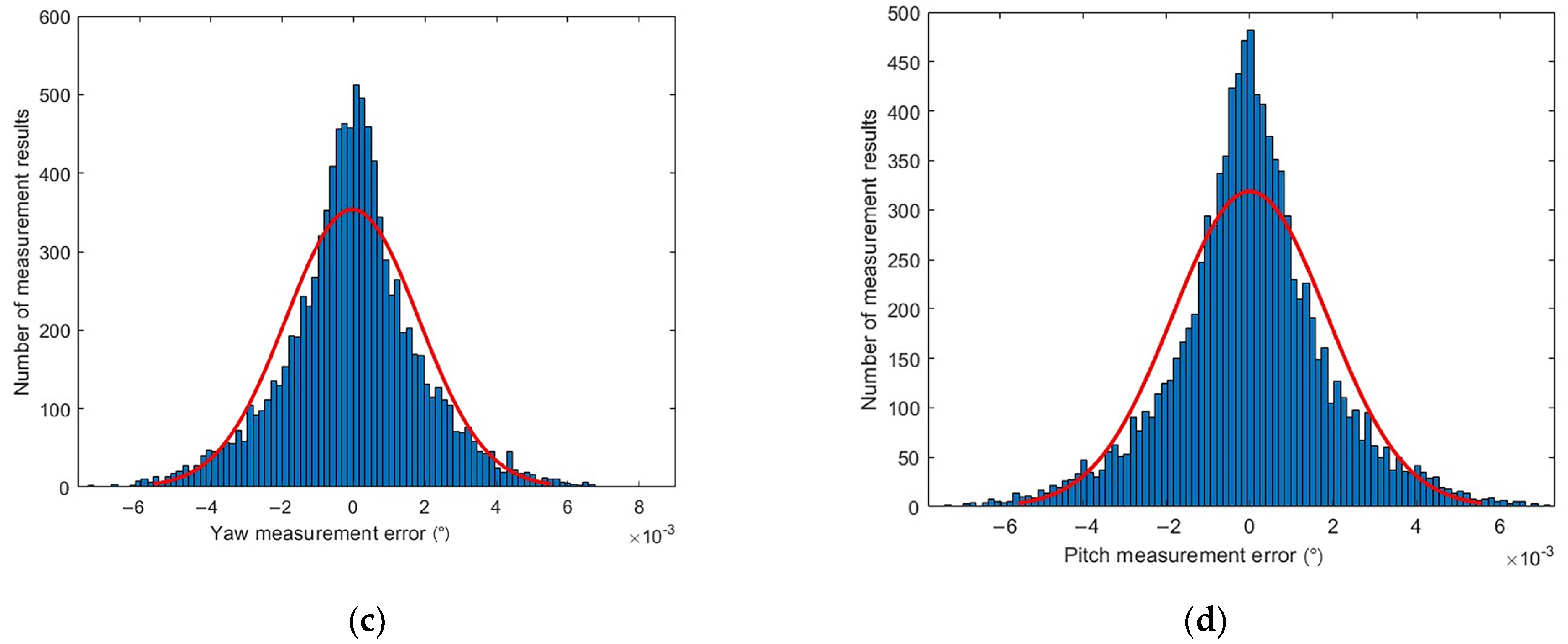
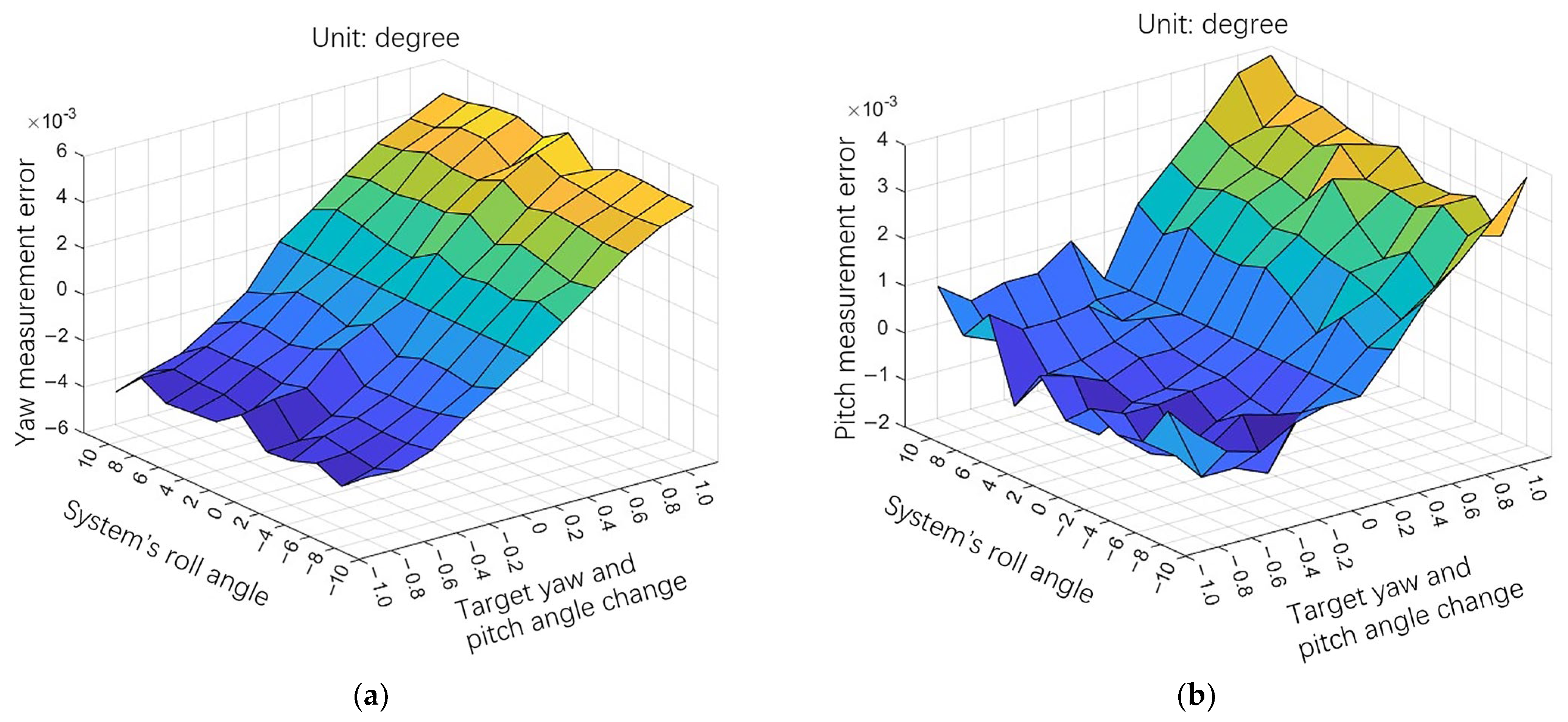
3.1. Simulation Results
- The installation error was taken as γ = ±0.003°;
- The focal length error was taken as ±0.05 mm;
- The CMOS sensor measurement error was taken as ±0.1 pixel;
- The SINS measurement error was taken as ±0.001° in yaw, pitch, and roll.
- Randomly generate an initial set of truth data, including the measurement of the system’s roll angle (within ±5°) and the yaw and pitch angles of the plane mirror axis measured with the autocollimator (within ±4.5°);
- Based on the generated truth data, back-project the theoretical truth data measured with the sensor, and randomly add the error data in Section 3.1 to them as the measurement data of the sensor;
- Substituting the sensor measurement data into Equation (4), recalculate the yaw and pitch angles of the plane mirror as measurements;
- Calculate the difference between the measured data and the true value data as the measurement error.
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kumar, A.S.A.; George, B.; Mukhopadhyay, S.C. Technologies and Applications of Angle Sensors: A Review. IEEE Sens. J. 2021, 21, 7195–7206. [Google Scholar] [CrossRef]
- Gao, W.; Kim, S.W.; Bosse, H.; Haitjema, H.; Chena, Y.L.; Lu, X.D.; Knapp, W.; Weckenmann, A.; Estler, W.T.; Kunzmann, H. Measurement technologies for precision positioning. CIRP Ann.-Manuf. Technol. 2015, 64, 773–796. [Google Scholar] [CrossRef]
- Zheng, F.; Long, F.; Zhao, Y.; Yu, C.; Jia, P.; Zhang, B.; Yuan, D.; Feng, Q. High-Precision Small-Angle Measurement of Laser-Fiber Autocollimation Using Common-Path Polarized Light Difference. IEEE Sens. J. 2023, 23, 9237–9245. [Google Scholar] [CrossRef]
- Mandal, L.; Singh, J.; Ganesan, A.R. Michelson Interferometer with mirrored right-angled prism for measurement of tilt with double sensitivity. J. Opt. 2023, 53, 1545–1550. [Google Scholar] [CrossRef]
- Meng, F.; Yang, G.; Yang, J.; Lu, H.; Dong, Z.; Kang, R.; Guo, D.; Qin, Y. Error Analysis of Normal Surface Measurements Based on Multiple Laser Displacement Sensors. Sensors 2024, 24, 2059. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Ma, R.; Cao, F.; Luo, L.; Li, X. A Review: High-Precision Angle Measurement Technologies. Sensors 2024, 24, 1755. [Google Scholar] [CrossRef] [PubMed]
- Zou, Y.; Zhang, N.; Yuan, H.; Liu, C.; Liu, D. High precision deflection angle measurement of irregular light spot. Chin. Space Sci. Technol. 2022, 42, 107–113. [Google Scholar]
- Guo, Y.; Cheng, H.; Liu, G. Three-degree-of-freedom autocollimation angle measurement method based on crosshair displacement and rotation. Rev. Sci. Instrum. 2023, 94, 0126806. [Google Scholar] [CrossRef] [PubMed]
- Yan, L.; Yan, Y.; Chen, B.; Lou, Y. A Differential Phase-Modulated Interferometer with Rotational Error Compensation for Precision Displacement Measurement. Appl. Sci. 2022, 12, 5002. [Google Scholar] [CrossRef]
- Kim, K.; Jang, K.W.; Ryu, J.K.; Jeong, K.H. Biologically inspired ultrathin arrayed camera for high-contrast and high-resolution imaging. Light Sci. Appl. 2020, 9, 28. [Google Scholar] [CrossRef]
- Guo, J.; Lin, L.; Li, S.; Chen, J.; Wang, S.; Wu, W.; Cai, J.; Zhou, T.; Liu, Y.; Huang, W. Ferroelectric superdomain controlled graphene plasmon for tunable mid-infrared photodetector with dual-band spectral selectivity. Carbon 2022, 189, 596–603. [Google Scholar] [CrossRef]
- Guo, J.; Lin, L.; Li, S.; Chen, J.; Wang, S.; Wu, W.; Cai, J.; Liu, Y.; Ye, J.; Huang, W. WSe2/MoS2 van der Waals Heterostructures Decorated with Au Nanoparticles for Broadband Plasmonic Photodetectors. ACS Appl. Nano Mater. 2022, 5, 587–596. [Google Scholar] [CrossRef]
- Guo, J.; Liu, Y.; Lin, L.; Li, S.; Cai, J.; Chen, J.; Huang, W.; Lin, Y.; Xu, J. Chromatic Plasmonic Polarizer-Based Synapse for All-Optical Convolutional Neural Network. Nano Lett. 2023, 23, 9651–9656. [Google Scholar] [CrossRef]
- Kong, Q.; Wen, L. Fast tilt measurement based on optical block. Opt. Laser Technol. 2022, 148, 107731. [Google Scholar] [CrossRef]
- Du, M.-x.; Yan, Y.-f.; Zhang, R.; Cai, C.-l.; Yu, X.; Bai, S.-p.; Yu, Y. 3D position angle measurement based on a lens array. Chin. Opt. 2022, 15, 45–55. [Google Scholar] [CrossRef]
- Ren, W.; Cui, J.; Tan, J. Precision roll angle measurement system based on autocollimation. Appl. Opt. 2022, 61, 3811–3818. [Google Scholar] [CrossRef] [PubMed]
- Dorofeev, N.V.; Kuzichkin, O.R.; Tsaplev, A.V. Accelerometric Method of Measuring the Angle of Rotation of the KinematicMechanisms of Nodes. Appl. Mech. Mater. 2015, 770, 592–597. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, X.; Mai, G.; Hu, R. Measurement Method for Angle Acceleration of Turn-table Based on Accelerometer. J. Astronaut. Metrol. Meas. 2015, 35, 14–16. [Google Scholar]
- Lu, Y.-l.; Pan, Y.-J.; Li, L.-l.; Liu, Y.; Peng, H. Measurement method of projectile’s heading and pitching angle velocities based on biaxial accelerometer. J. Chin. Inert. Technol. 2015, 23, 160–164. [Google Scholar]
- Ren, C.; Guo, D.; Zhang, L.; Wang, T. Research on Nonlinear Compensation of the MEMS Gyroscope under Tiny Angular Velocity. Sensors 2022, 22, 6577. [Google Scholar] [CrossRef]
- Lijia, Y.; Qiang, L.; Guochen, W.; Hualiang, S.; Qingzhi, Z. An on-orbit high-precision angular vibration measuring device based on laser gyro. Proc. SPIE 2022, 12169, 1216943. [Google Scholar]
- Liu, Y.; Luo, X.; Chen, X. Improvement of angle random walk of fiber-optic gyroscope using polarization-maintaining fiber ring resonator. Opt. Express 2022, 30, 29900–29906. [Google Scholar] [CrossRef] [PubMed]
- Ma, R.; Yu, H.; Ni, K.; Zhou, Q.; Li, X.; Wu, G. Angular velocity measurement system based on optical frequency comb. In Proceedings of the Conference on Semiconductor Lasers and Applications IX, Hangzhou, China, 21–23 October 2019. [Google Scholar]
- Ren, Y.; Zhang, F.; Liu, F.; Hu, X.; Fu, Y. Accuracy test method of multi-instrument cooperative measurement. Proc. SPIE 2022, 12282, 1228219. [Google Scholar]
- Kim, J.-A.; Lee, J.Y.; Kang, C.-S.; Woo, J.H. Hybrid optical measurement system for evaluation of precision two-dimensional planar stages. Measurement 2022, 194, 111023. [Google Scholar] [CrossRef]
- Suvorkin, V.; Garcia-Fernandez, M.; González-Casado, G.; Li, M.; Rovira-Garcia, A. Assessment of Noise of MEMS IMU Sensors of Different Grades for GNSS/IMU Navigation. Sensors 2024, 24, 1953. [Google Scholar] [CrossRef] [PubMed]
- Chang, L.; Bian, Q.; Zuo, Y.; Zhou, Q. SINS/GNSS-Integrated Navigation Based on Group Affine SINS Mechanization in Local-Level Frame. IEEE/ASME Trans. Mechatron. 2023, 28, 2471–2482. [Google Scholar] [CrossRef]
- Zhao, L.; Kang, Y.; Cheng, J.; Fan, R. A MFKF Based SINS/DVL/USBL Integrated Navigation Algorithm for Unmanned Underwater Vehicles in Polar Regions. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 3875–3880. [Google Scholar] [CrossRef]
- Liu, X.; Liu, X.; Wang, L.; Huang, Y.; Wang, Z. SINS/DVL Integrated System with Current and Misalignment Estimation for Midwater Navigation. IEEE Access 2021, 9, 51332–51342. [Google Scholar] [CrossRef]
- Feng, L.; Qu, X.; Ye, X.; Wang, K.; Li, X. Fast Feature Matching in Visual-Inertial SLAM. In Proceedings of the 2022 17th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 11–13 December 2022; pp. 500–504. [Google Scholar] [CrossRef]
- Cheng, Q.; Hu, H.; Li, L.; Wang, X.; Luo, X.; Zhang, X. Distortion analysis and focal length testing of off-axis optical system. Opt. Precis. Eng. 2022, 30, 2839–2846. [Google Scholar] [CrossRef]
- Wei, M.S.; Xing, F.; You, Z. A real-time detection and positioning method for small and weak targets using a 1D morphology-based approach in 2D images. Light Sci. Appl. 2018, 3, 18006. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Roll Angle (°) | Data Type | Measurement Groups | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| −0.001 | Mirror yaw (°) | 58.9891 | 59.1843 | 59.3862 | 59.5881 | 59.7882 | 59.9858 | 58.7882 | 58.5838 | 58.3834 | 58.1838 | 57.9819 |
| Mirror pitch (°) | 90.2941 | 90.4921 | 90.6908 | 90.8952 | 91.0932 | 91.2998 | 90.0947 | 89.8982 | 89.6941 | 89.4959 | 89.2971 | |
| xp in CMOS | 996.21 | 1082.25 | 1171.07 | 1259.81 | 1347.67 | 1434.39 | 908.08 | 818.45 | 730.23 | 642.92 | 554.45 | |
| zp in CMOS | 985.64 | 1072.45 | 1159.24 | 1248.72 | 1334.92 | 1425.21 | 898.62 | 812.91 | 723.92 | 637.33 | 550.85 | |
| 2.010 | Mirror yaw (°) | 58.9342 | 59.1346 | 59.3338 | 59.5343 | 59.7375 | 59.9371 | 58.7369 | 58.5367 | 58.3347 | 58.1356 | 57.9309 |
| Mirror pitch (°) | 90.2945 | 90.4973 | 90.6951 | 90.8961 | 91.0947 | 91.2951 | 90.0933 | 89.8943 | 89.6949 | 89.4949 | 89.2946 | |
| xp in CMOS | 996.78 | 1081.68 | 1166.11 | 1251.16 | 1337.37 | 1421.56 | 912.98 | 828.17 | 742.57 | 658.29 | 571.78 | |
| zp in CMOS | 985.57 | 1077.33 | 1166.81 | 1257.67 | 1347.51 | 1437.87 | 894.77 | 805.01 | 715.01 | 624.82 | 534.54 | |
| 4.002 | Mirror yaw (°) | 58.9664 | 59.1654 | 59.3642 | 59.5692 | 59.7686 | 59.9669 | 58.7627 | 58.5658 | 58.3646 | 58.1605 | 57.9634 |
| Mirror pitch (°) | 90.2976 | 90.4936 | 90.6922 | 90.8951 | 91.0959 | 91.2957 | 90.0921 | 89.8914 | 89.6961 | 89.4982 | 89.2925 | |
| xp in CMOS | 996.29 | 1077.64 | 1158.83 | 1242.53 | 1323.64 | 1404.31 | 913.21 | 832.94 | 750.86 | 667.69 | 587.58 | |
| zp in CMOS | 985.66 | 1077.11 | 1170.01 | 1264.51 | 1358.31 | 1451.31 | 889.87 | 796.47 | 705.27 | 613.01 | 517.77 | |
| 6.003 | Mirror yaw (°) | 58.9835 | 59.1883 | 59.3879 | 59.5843 | 59.7841 | 59.9892 | 58.7867 | 58.5819 | 58.3824 | 58.1865 | 57.9832 |
| Mirror pitch (°) | 90.2931 | 90.4925 | 90.6961 | 90.8969 | 91.0935 | 91.2999 | 90.0967 | 89.8933 | 89.6947 | 89.4956 | 89.2954 | |
| xp in CMOS | 996.43 | 1076.82 | 1154.83 | 1231.56 | 1309.67 | 1389.84 | 919.34 | 839.02 | 761.07 | 684.71 | 605.31 | |
| zp in CMOS | 985.58 | 1081.81 | 1179.34 | 1275.66 | 1370.41 | 1469.31 | 891.17 | 793.71 | 698.31 | 603.02 | 507.11 | |
| 8.007 | Mirror yaw (°) | 59.0043 | 59.2053 | 59.4065 | 59.6031 | 59.8038 | 60.0064 | 58.8056 | 58.6067 | 58.4061 | 58.2053 | 58.0048 |
| Mirror pitch (°) | 90.2923 | 90.4947 | 90.6924 | 90.8946 | 91.0965 | 91.2957 | 90.0921 | 89.8955 | 89.6918 | 89.4951 | 89.2913 | |
| xp in CMOS | 996.53 | 1071.88 | 1147.14 | 1220.53 | 1295.46 | 1371.41 | 922.08 | 847.62 | 772.76 | 697.43 | 622.66 | |
| zp in CMOS | 985.35 | 1085.26 | 1182.96 | 1282.49 | 1382.28 | 1480.58 | 886.62 | 789.21 | 689.19 | 592.02 | 492.45 | |
| 10.005 | Mirror yaw (°) | 59.0086 | 59.2059 | 59.4079 | 59.6074 | 59.8075 | 60.0061 | 58.8081 | 58.6015 | 58.4021 | 58.2022 | 58.0018 |
| Mirror pitch (°) | 90.2878 | 90.4854 | 90.6857 | 90.8844 | 91.0879 | 91.2847 | 90.0821 | 89.8816 | 89.6849 | 89.4802 | 89.2815 | |
| xp in CMOS | 996.58 | 1066.86 | 1139.08 | 1210.33 | 1281.35 | 1352.29 | 924.97 | 850.85 | 779.46 | 708.71 | 637.19 | |
| zp in CMOS | 985.35 | 1085.76 | 1187.43 | 1288.21 | 1391.17 | 1490.91 | 882.17 | 780.19 | 680.59 | 577.41 | 477.05 | |
| −2.006 | Mirror yaw (°) | 58.9537 | 59.1531 | 59.3571 | 59.5554 | 59.7552 | 59.9555 | 58.7547 | 58.5509 | 58.3521 | 58.1568 | 57.9529 |
| Mirror pitch (°) | 90.2958 | 90.4984 | 90.6992 | 90.8985 | 91.0972 | 91.2952 | 90.0911 | 89.8948 | 89.6965 | 89.4907 | 89.2906 | |
| xp in CMOS | 996.41 | 1087.01 | 1179.91 | 1270.05 | 1360.52 | 1451.51 | 905.81 | 813.51 | 723.12 | 634.23 | 542.01 | |
| zp in CMOS | 985.56 | 1071.19 | 1155.72 | 1239.63 | 1323.51 | 1406.63 | 899.65 | 817.05 | 733.63 | 647.11 | 563.26 | |
| −4.004 | Mirror yaw (°) | 59.0021 | 59.2047 | 59.4041 | 59.6004 | 59.8015 | 60.0088 | 58.8028 | 58.6031 | 58.4021 | 58.2037 | 58.0012 |
| Mirror pitch (°) | 90.2947 | 90.4979 | 90.6974 | 90.8953 | 91.0954 | 91.2957 | 90.0922 | 89.8922 | 89.6928 | 89.4938 | 89.2909 | |
| xp in CMOS | 996.21 | 1091.18 | 1184.89 | 1276.97 | 1371.23 | 1468.07 | 902.77 | 809.02 | 715.01 | 622.04 | 527.32 | |
| zp in CMOS | 985.37 | 1067.94 | 1148.86 | 1229.01 | 1310.05 | 1390.91 | 903.54 | 822.61 | 742.01 | 661.53 | 579.94 | |
| −6.000 | Mirror yaw (°) | 58.9945 | 59.1977 | 59.3999 | 59.5983 | 59.7976 | 59.9975 | 58.7913 | 58.5925 | 58.3916 | 58.1939 | 57.9945 |
| Mirror pitch (°) | 90.2922 | 90.4963 | 90.6957 | 90.8931 | 91.0932 | 91.2976 | 90.0955 | 89.8923 | 89.6914 | 89.4948 | 89.2926 | |
| xp in CMOS | 996.27 | 1094.52 | 1191.97 | 1287.85 | 1383.99 | 1480.52 | 898.61 | 802.44 | 705.53 | 610.31 | 514.13 | |
| zp in CMOS | 985.32 | 1064.99 | 1142.36 | 1218.89 | 1296.79 | 1376.34 | 909.37 | 830.68 | 752.81 | 676.65 | 598.34 | |
| −8.001 | Mirror yaw (°) | 58.9714 | 59.1781 | 59.3785 | 59.5754 | 59.7751 | 59.9758 | 58.7727 | 58.5719 | 58.3701 | 58.1722 | 57.9702 |
| Mirror pitch (°) | 90.2911 | 90.4971 | 90.6935 | 90.8979 | 91.0926 | 91.2933 | 90.0906 | 89.8917 | 89.6966 | 89.4977 | 89.2969 | |
| xp in CMOS | 996.14 | 1098.83 | 1197.91 | 1296.01 | 1394.55 | 1494.01 | 897.39 | 798.02 | 698.53 | 600.47 | 500.78 | |
| zp in CMOS | 985.68 | 1062.31 | 1135.11 | 1211.58 | 1283.52 | 1358.11 | 911.36 | 837.71 | 765.87 | 692.09 | 617.83 | |
| −10.006 | Mirror yaw (°) | 58.9665 | 59.1671 | 59.3617 | 59.5681 | 59.7611 | 59.9665 | 58.7616 | 58.5667 | 58.3666 | 58.1639 | 57.9635 |
| Mirror pitch (°) | 90.2917 | 90.4933 | 90.6942 | 90.8944 | 91.0939 | 91.2957 | 90.0971 | 89.8946 | 89.6902 | 89.4913 | 89.2969 | |
| xp in CMOS | 996.36 | 1098.48 | 1198.05 | 1302.56 | 1401.21 | 1505.27 | 893.01 | 793.38 | 691.28 | 588.71 | 487.71 | |
| zp in CMOS | 985.79 | 1057.29 | 1129.02 | 1199.38 | 1270.61 | 1341.91 | 917.94 | 845.85 | 773.25 | 703.45 | 635.44 | |
| Roll Angle (°) | Data Type | Measurement Groups | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| −0.001 | Yaw error (°) | 0.0016 | 0.0029 | 0.0040 | 0.0048 | 0.0053 | −0.0007 | −0.0014 | −0.0027 | −0.0028 | −0.0031 |
| Pitch error (°) | 0.0013 | 0.0018 | 0.0028 | 0.0026 | 0.0031 | −0.0004 | −0.0007 | −0.0008 | −0.0013 | −0.0008 | |
| 2.010 | Yaw error (°) | 0.0011 | 0.0021 | 0.0033 | 0.0043 | 0.0042 | −0.0016 | −0.0025 | −0.0034 | −0.0041 | −0.0042 |
| Pitch error (°) | 0.0009 | 0.0016 | 0.0021 | 0.0026 | 0.0026 | −0.0004 | −0.0005 | −0.0006 | −0.0006 | −0.0003 | |
| 4.002 | Yaw error (°) | 0.0013 | 0.0026 | 0.0036 | 0.0042 | 0.0047 | −0.0012 | −0.0024 | −0.0030 | −0.0034 | −0.0041 |
| Pitch error (°) | 0.0004 | 0.0015 | 0.0016 | 0.0025 | 0.0026 | −0.0006 | −0.0009 | −0.0013 | −0.0012 | −0.0006 | |
| 6.003 | Yaw error (°) | 0.0011 | 0.0023 | 0.0035 | 0.0040 | 0.0047 | −0.0012 | −0.0024 | −0.0031 | −0.0036 | −0.0037 |
| Pitch error (°) | 0.0010 | 0.0013 | 0.0020 | 0.0028 | 0.0028 | −0.0007 | −0.0005 | −0.0010 | −0.0010 | −0.0005 | |
| 8.007 | Yaw error (°) | 0.0015 | 0.0020 | 0.0033 | 0.0040 | 0.0046 | −0.0014 | −0.0022 | −0.0031 | −0.0038 | −0.0042 |
| Pitch error (°) | 0.0006 | 0.0010 | 0.0015 | 0.0024 | 0.0022 | −0.0004 | −0.0015 | −0.0012 | −0.0012 | 0.0004 | |
| 10.005 | Yaw error (°) | 0.0011 | 0.0022 | 0.0033 | 0.0041 | 0.0046 | −0.0010 | −0.0019 | −0.0029 | −0.0034 | −0.0033 |
| Pitch error (°) | 0.0008 | 0.0017 | 0.0023 | 0.0030 | 0.0037 | 0 | −0.0002 | −0.0006 | −0.0004 | 0.0002 | |
| −2.006 | Yaw error (°) | 0.0009 | 0.0025 | 0.0035 | 0.0037 | 0.0046 | −0.0013 | −0.0019 | −0.0030 | −0.0039 | −0.0039 |
| Pitch error (°) | 0.0011 | 0.0017 | 0.0021 | 0.0031 | 0.0029 | −0.0003 | −0.0003 | −0.0006 | −0.0003 | −0.0001 | |
| −4.004 | Yaw error (°) | 0.0010 | 0.0025 | 0.0035 | 0.0044 | 0.0050 | −0.0009 | −0.0022 | −0.0028 | −0.0036 | −0.0040 |
| Pitch error (°) | 0.0011 | 0.0020 | 0.0023 | 0.0028 | 0.0030 | 0.0001 | −0.0002 | −0.0004 | −0.0005 | −0.0010 | |
| −6.000 | Yaw error (°) | 0.0013 | 0.0023 | 0.0037 | 0.0044 | 0.0049 | −0.0008 | −0.0020 | −0.0029 | −0.0036 | −0.0041 |
| Pitch error (°) | 0.0014 | 0.0020 | 0.0023 | 0.0030 | 0.0032 | −0.0002 | 0.0003 | 0.0002 | 0.0002 | 0.0007 | |
| −8.001 | Yaw error (°) | 0.0015 | 0.0024 | 0.0033 | 0.0039 | 0.0046 | −0.0014 | −0.0022 | −0.0029 | −0.0035 | −0.0035 |
| Pitch error (°) | 0.0010 | 0.0018 | 0.0025 | 0.0027 | 0.0032 | 0 | −0.0003 | −0.0003 | −0.0003 | −0.0005 | |
| −10.006 | Yaw error (°) | 0.0010 | 0.0021 | 0.0031 | 0.0038 | 0.0045 | −0.0018 | −0.0028 | −0.0037 | −0.0041 | −0.0046 |
| Pitch error (°) | 0.0014 | 0.0021 | 0.0028 | 0.0036 | 0.0038 | 0.0010 | −0.0005 | 0.0005 | 0.0003 | 0.0008 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, W.; Li, J.; Liu, S.; Han, Y.; Liu, X.; Wang, Z.; Jiang, C. An Autocollimator Axial Measurement Method Based on the Strapdown Inertial Navigation System. Sensors 2024, 24, 2590. https://doi.org/10.3390/s24082590
Ma W, Li J, Liu S, Han Y, Liu X, Wang Z, Jiang C. An Autocollimator Axial Measurement Method Based on the Strapdown Inertial Navigation System. Sensors. 2024; 24(8):2590. https://doi.org/10.3390/s24082590
Chicago/Turabian StyleMa, Wenjia, Jianrong Li, Shaojin Liu, Yan Han, Xu Liu, Zhiqian Wang, and Changhong Jiang. 2024. "An Autocollimator Axial Measurement Method Based on the Strapdown Inertial Navigation System" Sensors 24, no. 8: 2590. https://doi.org/10.3390/s24082590
APA StyleMa, W., Li, J., Liu, S., Han, Y., Liu, X., Wang, Z., & Jiang, C. (2024). An Autocollimator Axial Measurement Method Based on the Strapdown Inertial Navigation System. Sensors, 24(8), 2590. https://doi.org/10.3390/s24082590