1. Introduction
The drilling and blasting method is the most commonly used method for tunnel construction. Different from the shield method, which depends primarily on mechanical cutting, the tunneling footage using the drilling and blasting method is achieved by blasting the rock. The process mainly includes drilling, blasting, ventilation, support, and slag discharge. This method is more flexible in construction, lower in cost, and more adaptable to geological conditions compared with the shield method. Moreover, it is especially suitable for tunnel projects with long distances and changeable geological conditions [
1]. As of 2019, the total length of the tunnels built in China is around 10,000, of which more than 90% were completed using the drilling and blasting method [
2]. The whole process of the drilling and blasting method has been mechanized, while drilling is the core step. The jumbo drill, as the main equipment for the drilling process, greatly impacts on the building speed and construction quality. Further, time spent on processes such as the blasting and support of each blasting cycle is fixed, so building speed mainly depends on the feed speed of the jumbo drill. Feed speed refers to the distance that the drill bit of the hydraulic rock drill drills on the tunnel face in a unit of time when the machine performs the blasthole drilling operation. The unit is m/min. Under specific working conditions, increasing the feed speed to reduce the construction cost is one of the key decision-making issues for tunnel construction [
3].
Previous research showed that the feed speed of the jumbo drill is mainly affected by geological conditions and driving parameters. The geological conditions can be characterized by surrounding rock classification [
4]. The driving parameters include impact pressure, feed pressure, rotational pressure, water pressure, and water flow [
5]. The influence of driving parameters on feed speed is reflected in two aspects. First, the matching relation between driving parameters will affect the feed speed. If the impact pressure and rotational pressure do not meet the performance required by feed pressure, it will lead to abnormal drilling conditions such as sticking and idling, and then it will make the feed speed abnormal and will accelerate drilling tool wear. The reasonable matching of the above driving parameters is the basis for normal drilling. Second, driving parameters are not perfectly positively correlated with feed speed. Excessive feed pressure, for example, can cause the drill pipe to bend significantly, which, in turn, decreases feed speed. Under specific working conditions, it is practical to optimize driving parameters to increase the feed speed.
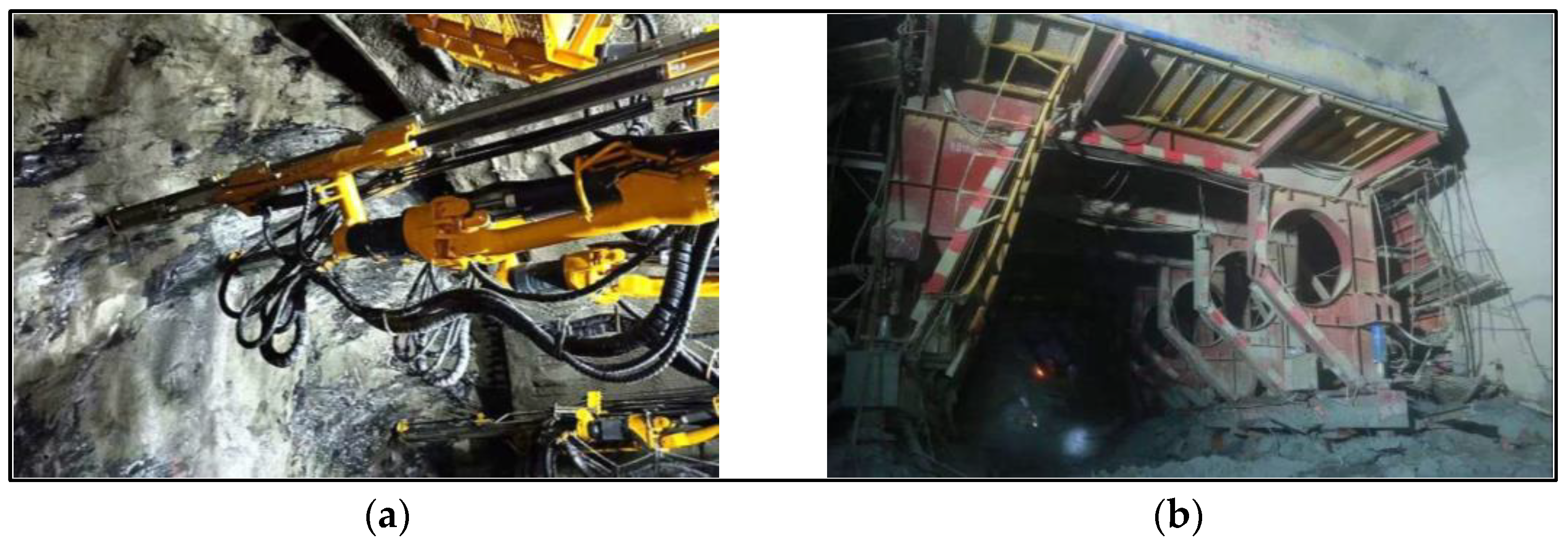
Tunnel construction is of high risk. An unreasonable tunneling process can easily cause serious engineering accidents, such as face collapse, rock bursts, mud, and water in a rush [
6]. For this reason, the matching relation of driving parameters and corresponding feed speed is required to ensure high reliability. Meanwhile, due to the complex working conditions, which are mainly reflected in the changeable geological conditions and the limitation of the operating status of the service equipment, driving parameters and corresponding feed speed should respond to the changes in time to avoid invalid optimized results [
7]. That is to say, the optimized results need to have high efficiency.
Figure 1 shows the complex working conditions and the mud and water in the rush accident.
The driving parameter optimization for the jumbo drill under specific working conditions can be represented as follows.
where
is the objective function, and
is the feed speed of the jumbo drill. Constraints (
) depend on the specific working conditions, including constraints of geological conditions (
) and constraints of driving parameters (
), such as feed pressure and impact pressure [
8].
and
are the lower bound and upper bound of the value range of the driving parameters, respectively, in the current state of the equipment.
Generally speaking, methods of driving parameter optimization in tunnel engineering include experiments, numerical simulations, and optimization algorithms. The experimental method refers to testing the influence of the driving parameters on the optimized objective using experiments to obtain the optimal solution [
9]. However, the experiment environment is often difficult to build. What is more, this method is low in efficiency, so it cannot meet the requirement of a timely response to the changeable working conditions. The numerical simulation method refers to simplifying the tunnel engineering problem into a mathematical model and obtaining the approximate solution by numerical analysis [
10]. The impact of driving parameters on the optimized objective can be efficiently reflected by this method, which meets the requirement of high efficiency. However, the reliability of the results is generally low because the simulation process needs to simplify the boundary conditions, and the constitutive model of the analysis software does not necessarily match the engineering problem, which may affect the results [
11].
With the development of artificial intelligence and its application to engineering, optimization algorithms represented by swarm intelligence algorithms have gradually been used in tunnel engineering [
12]. Mikaeil R et al. employed a fuzzy C-mean clustering algorithm to assess the risk level of tunnel construction based on geological conditions, groundwater flow and other factors [
13]. Moreover, the effectiveness of the intelligent model was verified on Iranian road tunnels. Afradi A et al. used the fuzzy logic method to predict the penetration rate of the tunnel boring machine, and the input parameters included compressive strength, density of the rock, and so on [
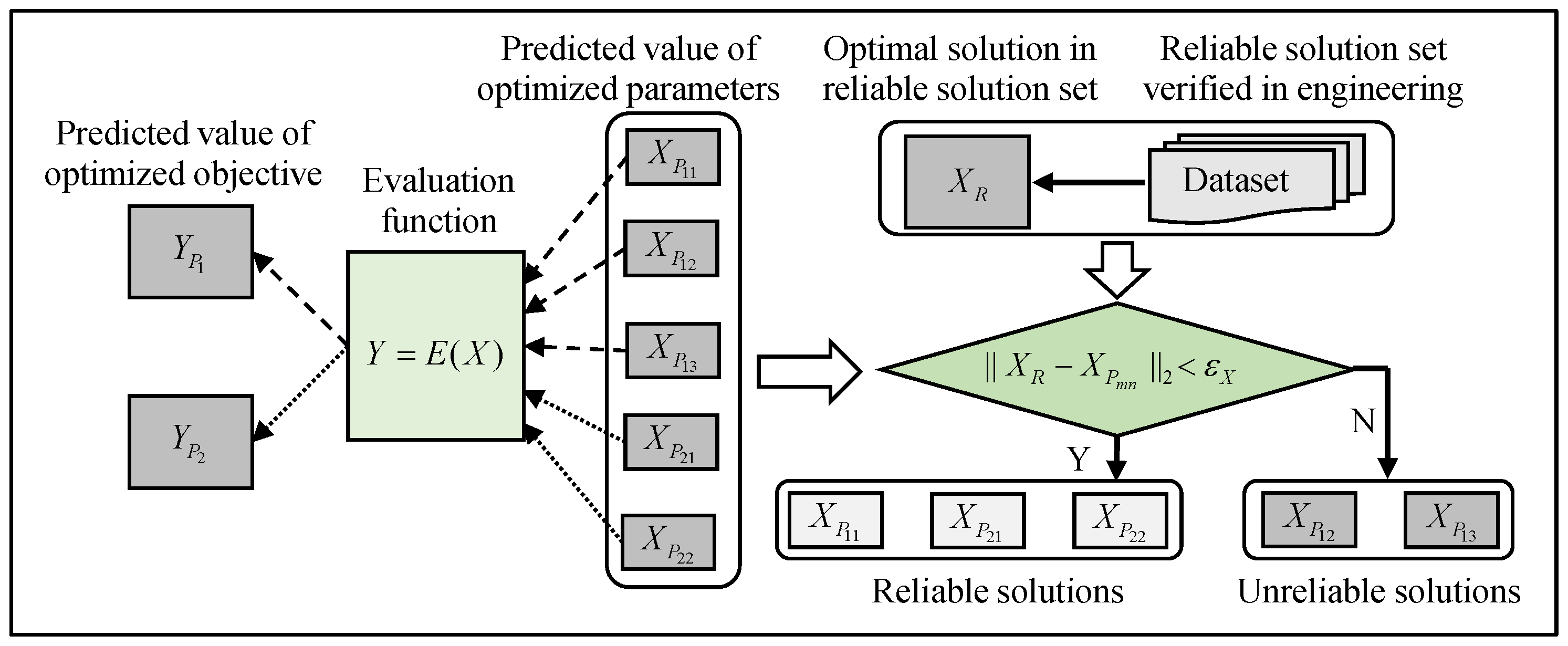
14]. The results show that the prediction accuracy is better than the traditional mechanistic models. There are two key issues for swarm intelligence algorithms: (1) establish the evaluation criteria of the optimization problem, which is also called the evaluation function; (2) establish the heuristic rules that realize rapid convergence. The main problems existing in the above issues are as follows.
I. The evaluation function reflects the mechanism of the driving parameters to the optimized objective to a certain extent. So, the accuracy is very high under specific working conditions, which ensures the high reliability of the optimized results [
15]. The solution of the evaluation function is mainly based on the model-driven method. Concretely, a mathematical model was constructed according to prior knowledge, such as the principles of the engineering problem and data distribution characteristics, and experimental data were used to fit the coefficients [
5]. However, the difficulty of constructing a mathematical model lies in the fact that the considerable and interrelated domain knowledge of engineering problems makes it hard to determine the main parameters and the form of the model [
16]. The existing models for predicting feed speed are in the form of a polynomial with two features [
17,
18]. First, these models cover the relationship between a single driving parameter and feed speed without considering the influence of the matching relation of the driving parameters on feed speed. Second, these models are built based on specific experimental conditions, so the ability to generalize to other working conditions is poor. Therefore, the above models based on the model-driven method are not suitable for tunnel engineering with complex working conditions [
19]. The data-driven evaluation function can handle the nonlinear relationship between the high-dimensional parameters. Moreover, the model can be continuously updated according to the data under complex working conditions to improve the applicability of the evaluation function cross-working conditions. Guo D et al. mixed random forest and LSTM algorithms to establish an intelligent driving model for the tunnel boring machine [
20]. Multiple variables, such as geological conditions and torque, are used to predict the cutter speed and penetration speed, and they provide a decision-making reference for the operation process. Kim D employed an ensemble learning algorithm to predict the surface settlement of the urban tunnels according to more than 40 input parameters [
21]. The accuracy of the method was improved by more than 10% compared with the traditional method and is applicable to complex geological conditions.
II. Swarm intelligence algorithms have been applied in the field of tunnel optimization. Wang H et al. proposed a differential evolution-based multi-objective genetic algorithm to optimize the feed speed and cutter speed of the tunnel boring machine under different geological conditions [
22]. Moreover, the results show that the optimization results are better than those of the manual experience. Kim K et al. used the particle swarm optimization (PSO) algorithm to optimize the drainage system of the undersea tunnel and simulated the water boundary conditions of the optimal drainage system [
23]. The optimized results reduce the construction cost under the premise of ensuring hydraulic stability. The shortcomings of swarm intelligence algorithms are that the convergence rate is greatly affected by initial values and the search rate is low, leading to the difficulty in meeting the requirement of high efficiency for tunnel construction [
24].
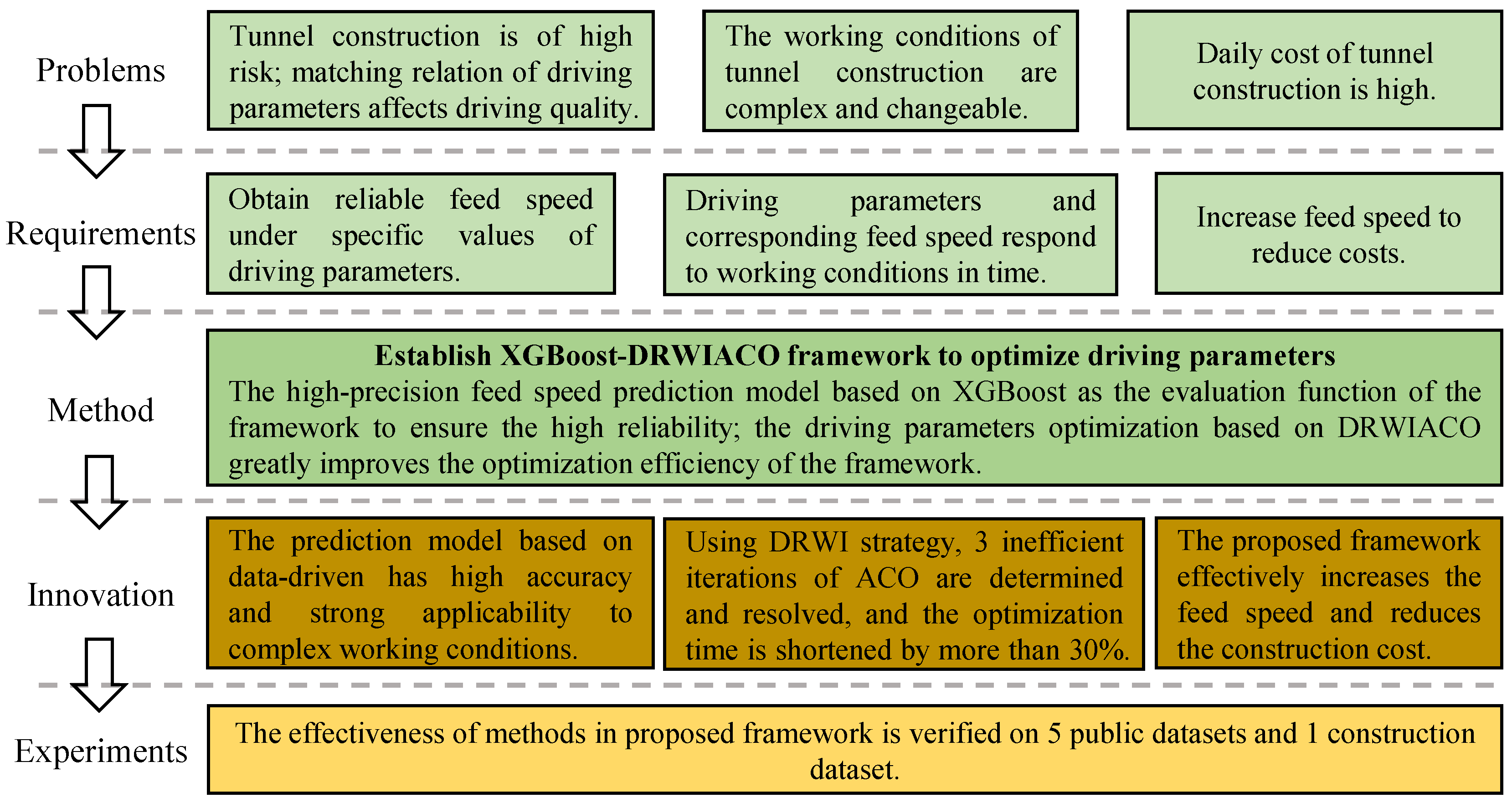
Given the above problems, the XGBoost-DRWIACO framework is proposed in this paper. Moreover, the research findings are applied to driving parameter optimization to increase the feed speed of the jumbo drill. The following research is carried out.
I. The XGBoost-DRWIACO framework is established in
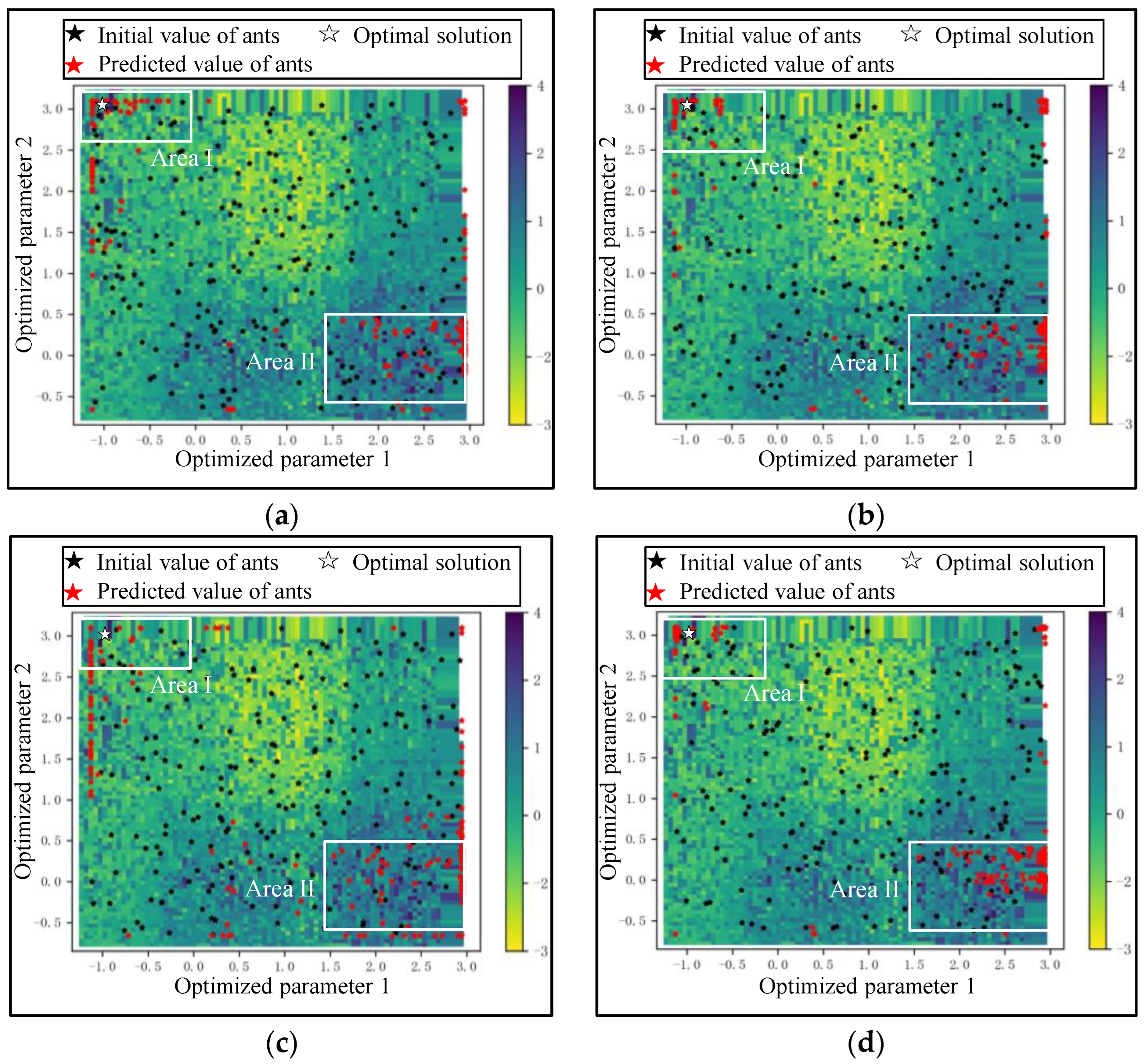
Section 2. Part 1 of the framework is a high-accuracy prediction model for feed speed based on XGBoost. According to construction data in different working conditions, the model realizes effective mapping between driving parameters and feed speed. As an evaluation function, it is suitable for driving parameter optimization under complex working conditions. Part 2 of the framework is an improved ant colony algorithm based on dimension reduction while iterating strategy (DRWIACO). The algorithm resolves three situations that lead to the inefficient iteration of the ant colony algorithm (ACO), thereby improving efficiency compared with ACO.
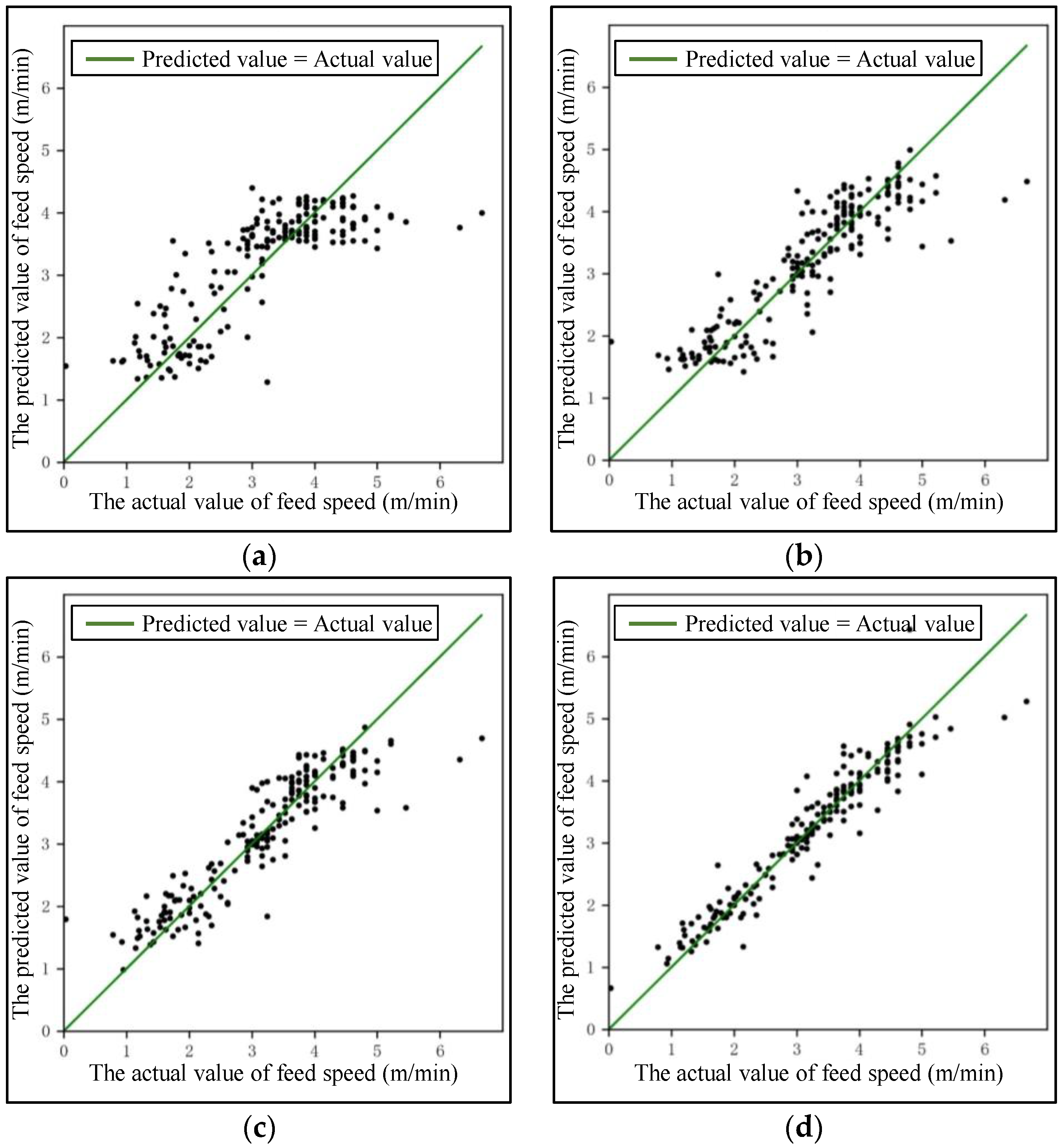
II. The effectiveness of the prediction model for feed speed and the DRWIACO are verified in
Section 4. Then, driving parameter optimization using the XGBoost-DRWIACO framework is carried out on the construction dataset. The optimized results with high accuracy and efficiency are proved to meet the needs for tunnel construction and improve the economic benefit.
4. Conclusions
To fulfill the requirements of high reliability and efficiency for optimizing the driving parameters of the jumbo drill, a method based on the XGBoost-DRWIACO framework to optimize the driving parameters to increase feed speed was proposed. This method solves the defects of low accuracy under complex working conditions for the model-driven evaluation function and low efficiency of swarm intelligent algorithms. The optimized results meet the above-mentioned requirements in tunnel engineering and reduce construction costs. This method has the potential to be applied to tunnel construction decision-making and production automation. The contributions of this paper are as follows.
I. An idea of using the data-driven method to establish the evaluation function was proposed, and a prediction model for feed speed based on XGBoost was established. The accuracy of the model under complex working conditions is better than that of the model-driven methods and the comparative data-driven methods.
II. DRWIACO was proposed to resolve three situations that cause the inefficient iterations of ACO. It shows that the efficiency of DRWIACO increased by more than 30%, with the accuracy loss being less than 5% compared with ACO in five public datasets.
III. The experimental results reveal that the error of DRWIACO was less than 10%, and the efficiency increased by over 30% compared with the comparison methods, which meet the requirements of high accuracy and efficiency for tunnel construction. It demonstrates a 19% increase in economic efficiency by comparing the cost before and after optimization.
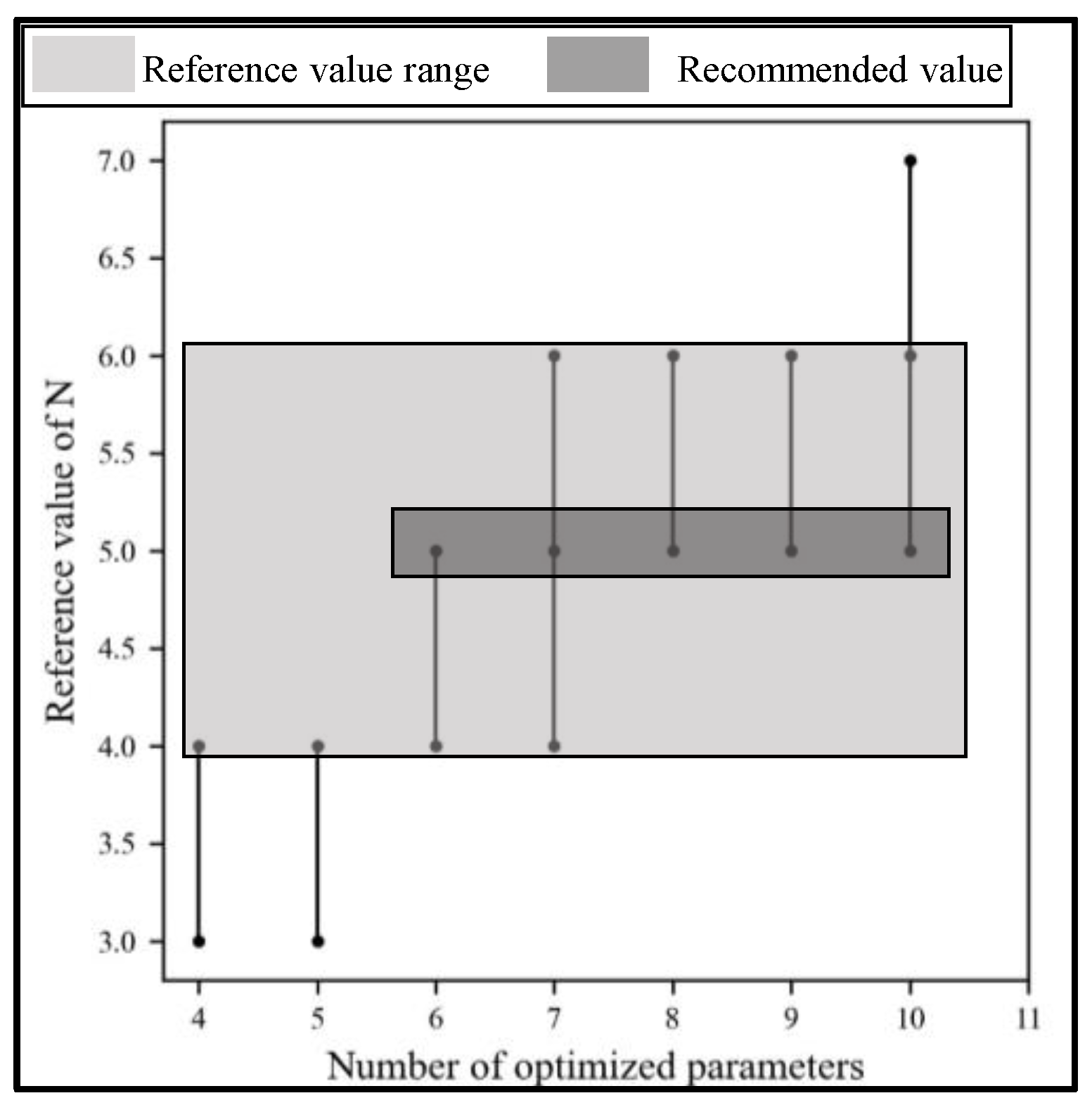
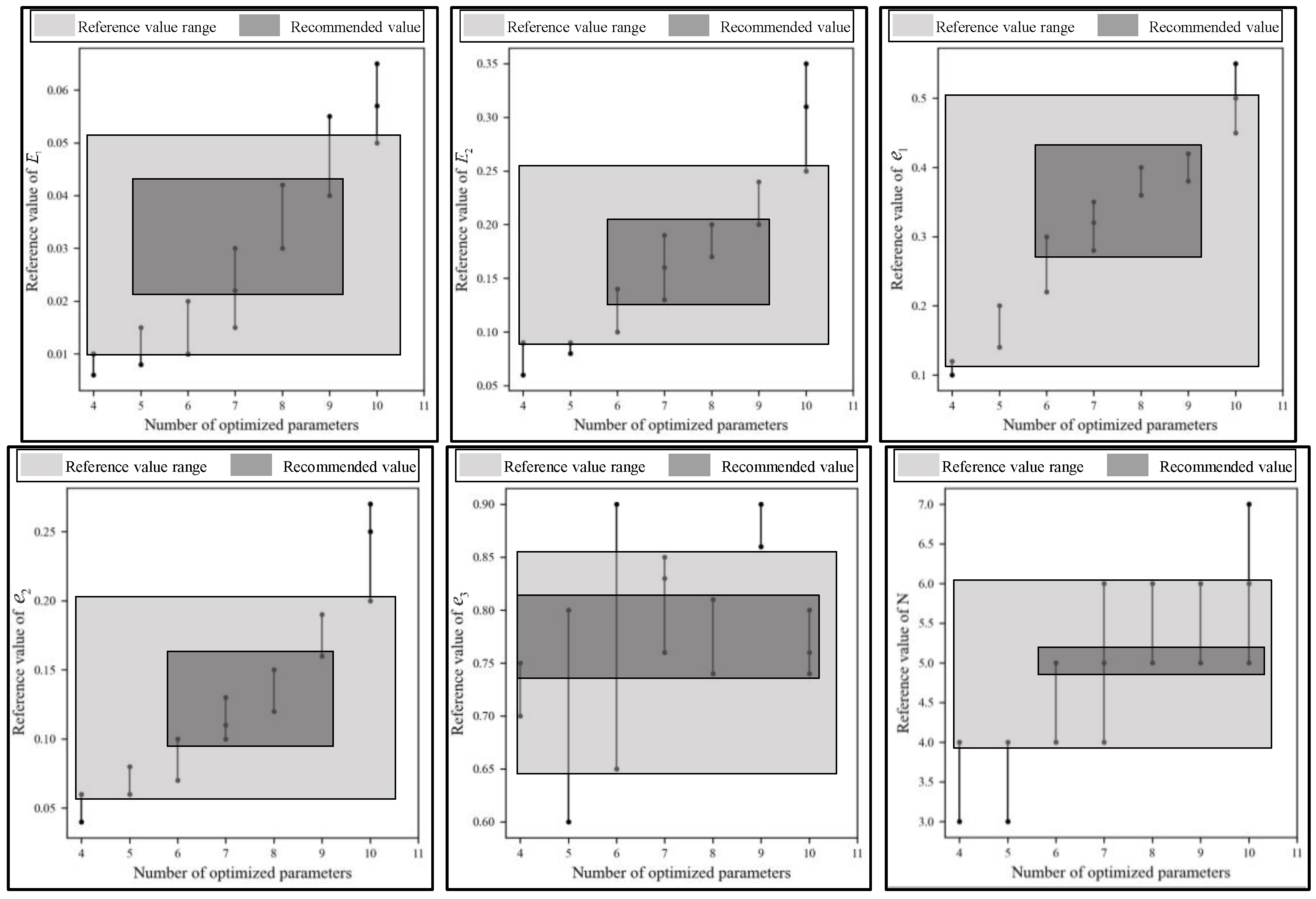
It should be noted that six thresholds need to be assigned in DRWIACO. The reference value range was given by experiments in limited datasets. The values of the thresholds should be adjusted within this value range based on the specific dataset. It is necessary to further study the relationship between optimized parameters and the values of the thresholds to simplify the thresholds assignment.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










