
The Influence of Nonlinear High-Intensity Dynamic Processes on the Standing Wave Precession of a Non-Ideal Hemispherical Resonator


Abstract
:1. Introduction
2. Methods
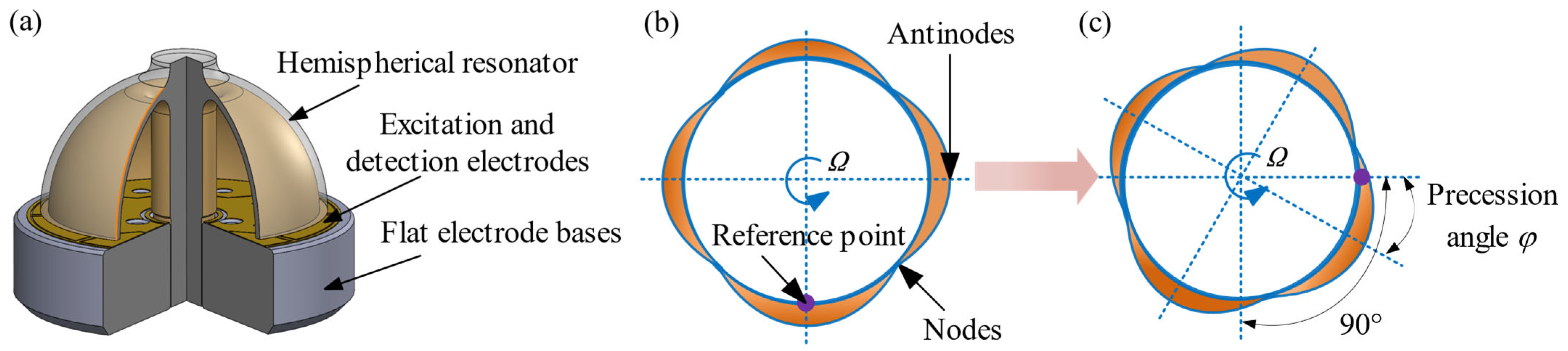
2.1. Basic Structure and Working Principle of HRG
2.2. Dynamical Models of Hemispherical Resonators
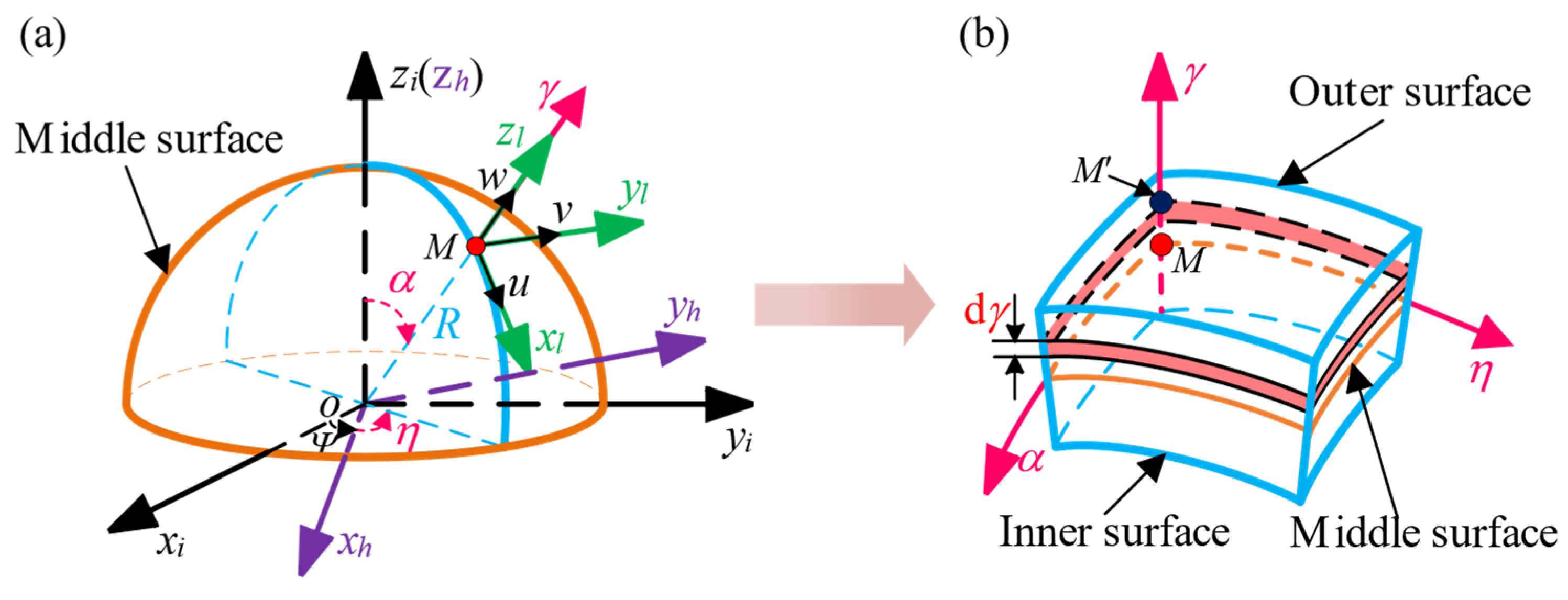
2.2.1. Strain Energy of Hemispherical Resonator
2.2.2. Kinetic Energy of the Hemispherical Resonator
2.2.3. Dynamic Equations of the Hemispherical Resonators
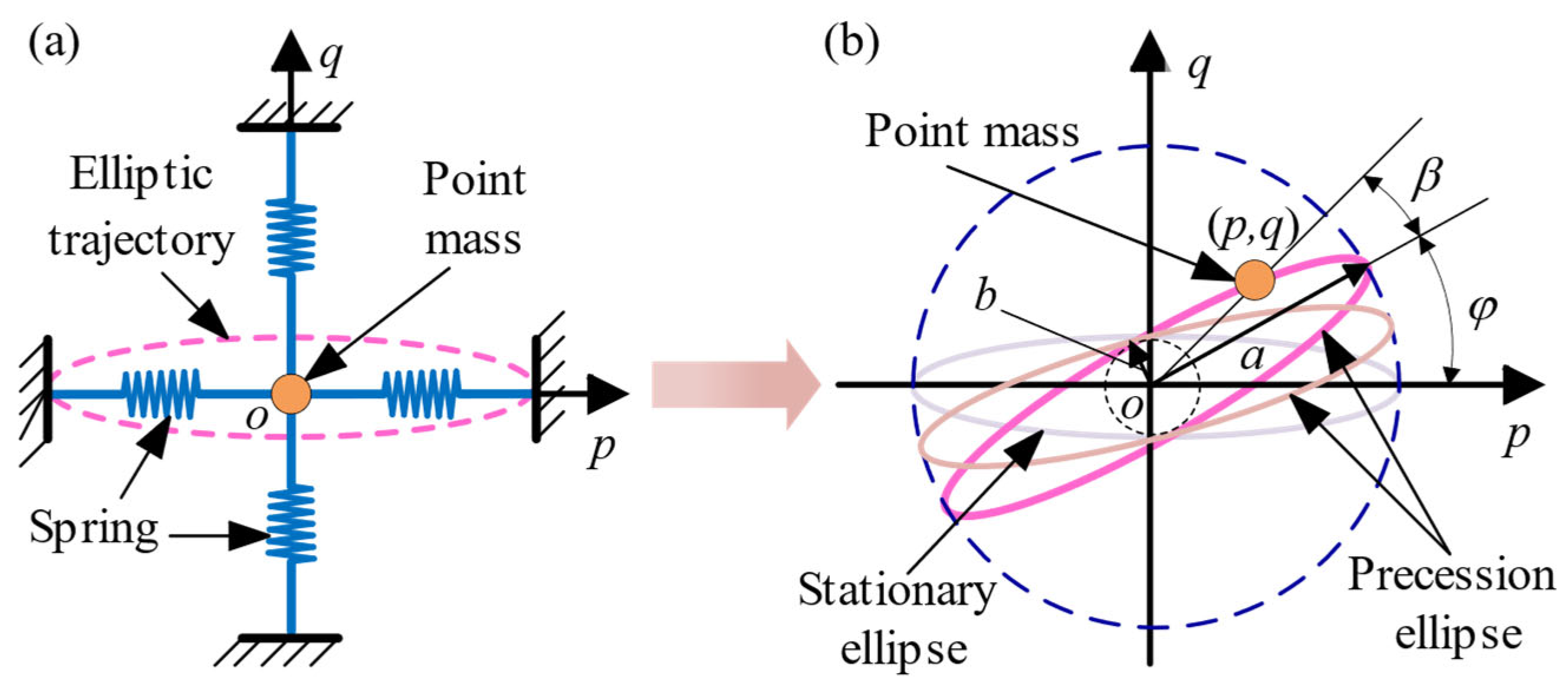
2.3. Method of Averaging
2.3.1. Solution to the Ideal Hemispherical Resonator
2.3.2. Solution to the Non-Ideal Hemispherical Resonator
3. Results and Discussion
3.1. Frequency Splitting and Angular Velocity
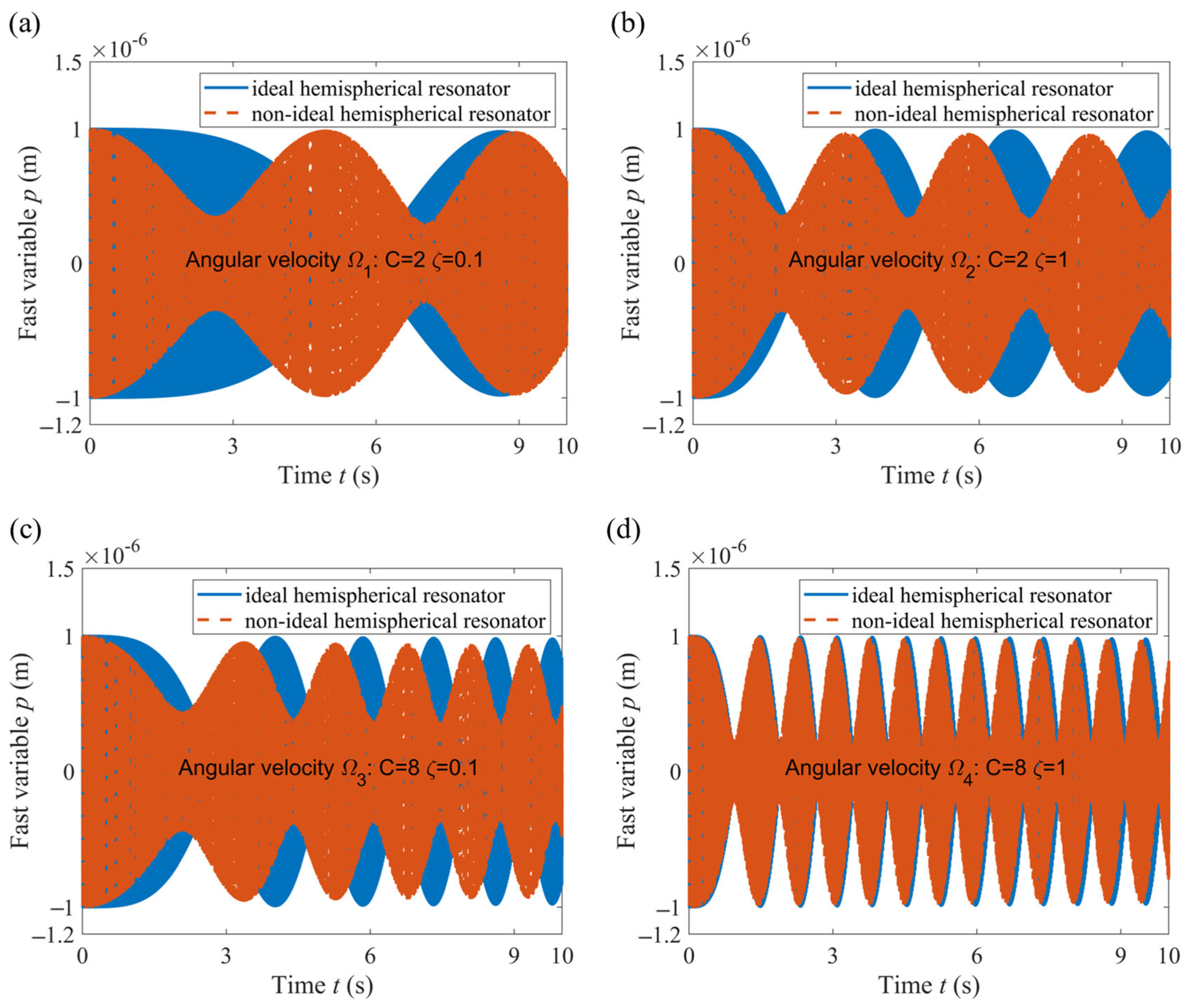
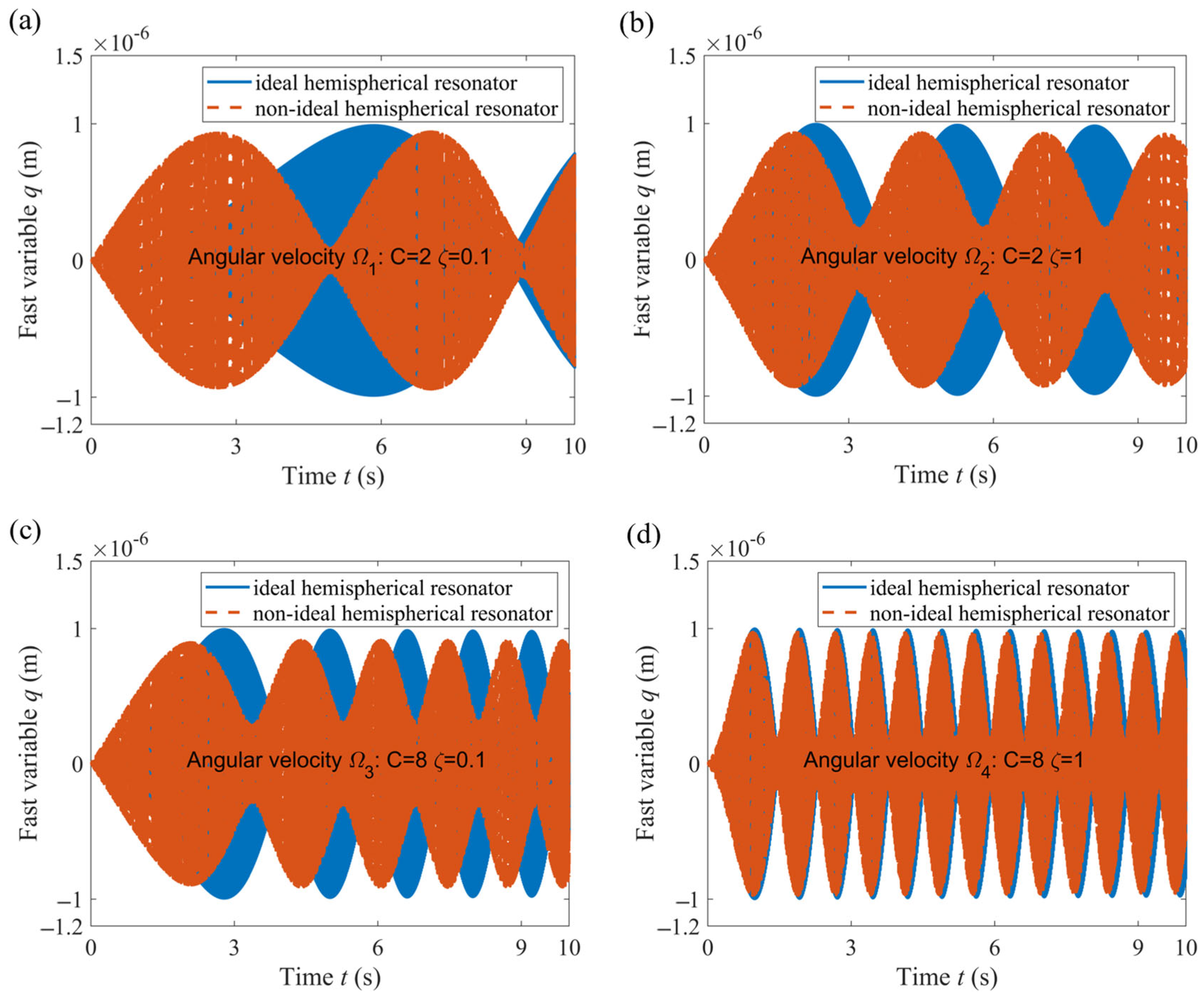
3.2. Comparison of the Change Law of Fast Variables
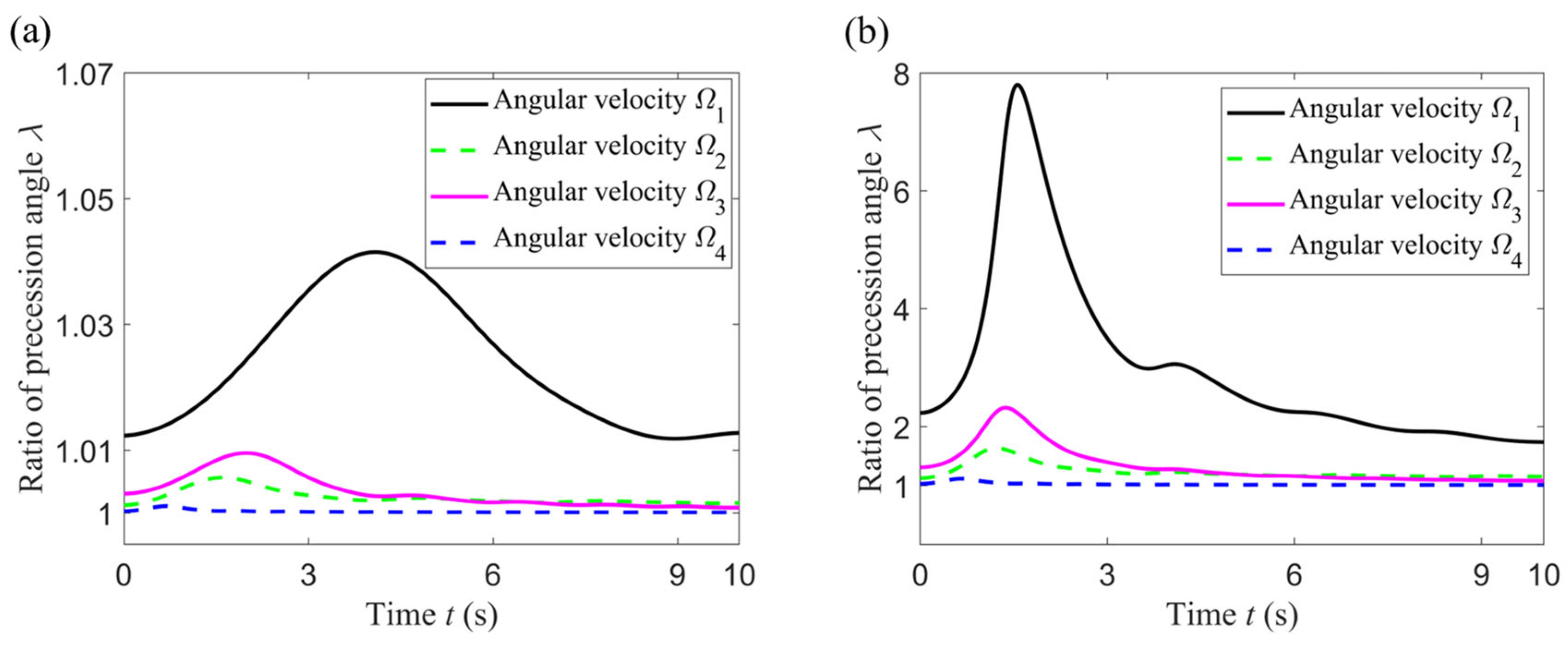
3.3. Comparison of the Change Law of Slow Variable
3.3.1. No Angular Velocity and Small Uniform Angular Velocity
3.3.2. High-Intensity Dynamic
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Coefficients of Strain Energy and Kinetic Energy
References
- Xu, Z.; Zhu, W.; Yi, G.; Fan, W. Dynamic modeling and output error analysis of an imperfect hemispherical shell resonator. J. Sound Vib. 2021, 498, 115964. [Google Scholar] [CrossRef]
- Vakhlyarsky, D.; Sorokin, F.; Gouskov, A.; Basarab, M.; Lunin, B. Approximation method for frequency split calculation of coriolis vibrating gyroscope resonator. J. Sound Vib. 2022, 526, 116733. [Google Scholar] [CrossRef]
- Remillieux, G.; Delhaye, F. Sagem Coriolis Vibrating Gyros: A vision realized. In Proceedings of the DGON Inertial Sensors and Systems Symposium (ISS), Karlsruhe, Germany, 16–17 September 2014. [Google Scholar]
- Thielman, L.O.; Bennett, S.; Barker, C.H.; Ash, M.E. Proposed IEEE Coriolis Vibratory Gyro standard and other inertial sensor standards. In Proceedings of the IEEE Position Location and Navigation Symposium, Palm Springs, CA, USA, 15–18 April 2002; pp. 351–358. [Google Scholar]
- Rozelle, D.M. The Hemispherical Resonator Gyro: From Wineglass to the Planets. In Proceedings of the AAS/AIAA 19th Space Flight Mechanics Meeting, Savannah, GA, USA, 8–12 February 2009; pp. 1157–1178. [Google Scholar]
- Maslov, A.; Maslov, D.; Ninalalov, I.; Merkuryev, I. Hemispherical Resonator Gyros (An Overview of Publications). Gyroscopy Navig. 2023, 14, 1–13. [Google Scholar] [CrossRef]
- Indeitsev, D.A.; Udalov, P.P.; Popov, I.A.; Lukin, A.V. Nonlinear Dynamics of the Hemispherical Resonator of a Rate-Integrating Gyroscope under Parametric Excitation of the Free Precession Mode. J. Mach. Manuf. Reliab. 2022, 51, 386–396. [Google Scholar] [CrossRef]
- QU, T. Review on the current advances, key technology and future trends of hemispherical resonator gyroscope. Opt. Optoelectron. Technol. 2022, 20, 1–15. [Google Scholar]
- Delhaye, F. HRG by SAFRAN The game-changing technology. In Proceedings of the 5th IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Lake Como, Italy, 26–29 March 2018; pp. 173–176. [Google Scholar]
- Jeanroy, A.; Bouvet, A.; Remillieux, G. HRG and marine applications. Gyroscopy Navig. 2014, 5, 67–74. [Google Scholar] [CrossRef]
- Matthews, A.; Rybak, F. Comparison of hemispherical resonator gyro and optical gyros. IEEE Aerosp. Electron. Syst. Mag. 1992, 7, 40–46. [Google Scholar] [CrossRef]
- Bryan, G.H. On the beats in the vibrations of a revolving cylinder or bell. In Cambridge Philosophical Society; Cambridge University: Cambridge, UK, 1890; pp. 101–111. [Google Scholar]
- Kim, J.-H.; Kim, J.-H. Trimming of imperfect hemispherical shell including point mass distributions. Int. J. Mech. Sci. 2017, 131, 847–852. [Google Scholar] [CrossRef]
- Lynch, D.D. Vibratory gyro analysis by the method of averaging. In Proceedings of the 2nd Saint Petersburg International Conference on Gyroscopic Technology and Navigation, St. Petersburg, Russia, 24–25 May 1995; pp. 26–34. [Google Scholar]
- Choi, S.-Y.; Kim, J.-H. Natural frequency split estimation for inextensional vibration of imperfect hemispherical shell. J. Sound Vib. 2011, 330, 2094–2106. [Google Scholar] [CrossRef]
- Basarab, M.; Lunin, B.; Matveev, V.; Chumankin, E. Balancing of hemispherical resonator gyros by chemical etching. Gyroscopy Navig. 2015, 6, 218–223. [Google Scholar] [CrossRef]
- Wang, C.; Ning, Y.; Huo, Y.; Yuan, L.; Cheng, W.; Tian, Z. Frequency splitting of hemispherical resonators trimmed with focused ion beams. Int. J. Mech. Sci. 2024, 261, 108682. [Google Scholar] [CrossRef]
- Huo, Y.; Wei, Z.; Ren, S.; Yi, G. High Precision Mass Balancing Method for the Fourth Harmonic of Mass Defect of Fused Quartz Hemispherical Resonator Based on Ion Beam Etching Process. IEEE Trans. Ind. Electron. 2023, 70, 9601–9613. [Google Scholar] [CrossRef]
- Basarab, M.; Lunin, B.; Vakhlyarskiy, D.; Chumankin, E. Investigation of nonlinear high-intensity dynamic processes in a non-ideal solid-state wave gyroscope resonator. In Proceedings of the 27th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 25–27 May 2020; pp. 1–4. [Google Scholar]
- Basarab, M.; Lunin, B. Solving the Coriolis Vibratory Gyroscope Motion Equations by Means of the Angular Rate B-Spline Approximation. Mathematics 2021, 9, 292. [Google Scholar] [CrossRef]
- Goncalves, P.B.; Silva, F.M.A.; Del Prado, Z.J.G.N. Reduced order models for the nonlinear dynamic analysis of shells. In Proceedings of the IUTAM Symposium on Analytical Methods in Nonlinear Dynamics, Darmstadt, Germany, 6–9 July 2016; pp. 118–125. [Google Scholar]
- Xu, J.; Yuan, X.; Wang, Y.Q. Unified nonlinear dynamic model for shells of revolution with arbitrary shaped meridians. Aerosp. Sci. Technol. 2024, 146, 108910. [Google Scholar] [CrossRef]
- Xu, Z. Elasticity, 5th ed.; Higher Education Press: Beijing, China, 2016; pp. 174–193. (In Chinese) [Google Scholar]
- Mattveev, V.A.; Lipatnikov, V.I.; Alekin, A.V.; Basarab, M.A. Solid State Wave Gyro, 1st ed.; Yang, Y.; Zhao, H., Translators; National Defense Industry Press: Beijing, China, 2009; pp. 17–28. (In Chinese) [Google Scholar]
- Blevins, R.D.; Plunkett, R. Formulas for natural frequency and mode shape. J. Appl. Mech. 1980, 47, 461. [Google Scholar] [CrossRef]
- Chang, C.; Hwang, J.; Chou, C. Modal precession of a rotating hemispherical shell. Int. J. Solids Struct. 1996, 33, 2739–2757. [Google Scholar] [CrossRef]
- Friedland, B.; Hutton, M. Theory and error analysis of vibrating-member gyroscope. IEEE Trans. Autom. Control 1978, 23, 545–556. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Variable | Value [unit] |
|---|---|---|
| R | Radius of the middle surface | 15 mm |
| H | Thickness | 0.85 mm |
| E | Young’s modulus | 76.7 GPa |
| ρ | Density | 2200 kg/m3 |
| μ | Poisson’s ratio | 0.17 |
| ρ0 | Average density | 2200 kg/m3 |
| ε4 | Relative amplitude | 1.0 × 10−4 |
| θ4 | Relative phase | π/7 rad |
| Symbol | Parameter C (rad/s) | Parameter ς (1/s) |
|---|---|---|
| Angular velocity Ω1 | 2.0 | 0.1 |
| Angular velocity Ω2 | 2.0 | 1.0 |
| Angular velocity Ω3 | 8.0 | 0.1 |
| Angular velocity Ω4 | 8.0 | 1.0 |
| Case Number | Parameter ε4 | Frequency Splitting Δf (Hz) |
|---|---|---|
| Case 1 (small) | 1.0 × 10−5 | Δf1 = 0.00397 |
| Case 2 (large) | 1.0 × 10−4 | Δf2 = 0.03970 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, W.; Ren, S.; Xi, B.; Tian, Z.; Ning, Y.; Huo, Y. The Influence of Nonlinear High-Intensity Dynamic Processes on the Standing Wave Precession of a Non-Ideal Hemispherical Resonator. Sensors 2024, 24, 2709. https://doi.org/10.3390/s24092709
Cheng W, Ren S, Xi B, Tian Z, Ning Y, Huo Y. The Influence of Nonlinear High-Intensity Dynamic Processes on the Standing Wave Precession of a Non-Ideal Hemispherical Resonator. Sensors. 2024; 24(9):2709. https://doi.org/10.3390/s24092709
Chicago/Turabian StyleCheng, Wei, Shunqing Ren, Boqi Xi, Zhen Tian, Youhuan Ning, and Yan Huo. 2024. "The Influence of Nonlinear High-Intensity Dynamic Processes on the Standing Wave Precession of a Non-Ideal Hemispherical Resonator" Sensors 24, no. 9: 2709. https://doi.org/10.3390/s24092709
APA StyleCheng, W., Ren, S., Xi, B., Tian, Z., Ning, Y., & Huo, Y. (2024). The Influence of Nonlinear High-Intensity Dynamic Processes on the Standing Wave Precession of a Non-Ideal Hemispherical Resonator. Sensors, 24(9), 2709. https://doi.org/10.3390/s24092709