1. Introduction
Reduction in size and power consumption of consumer electronics has opened up many new opportunities for low power wireless sensor networks. Such networks have significant potential in a variety of applications, including monitoring of animal health and behaviour, structural monitoring for mining equipment and measuring water salinity levels of oceans and rivers.
With these opportunities come a number of new challenges. Sensor nodes are usually battery powered, so as sensor networks increase in number and size, replacement of depleted batteries becomes time consuming and wasteful. Additionally, a battery that is large enough to last the life, say five years, of a sensor node would dominate the overall size of the node, and thus would not be very attractive or practical. Additionally, the battery chemistries often involve toxic heavy metals, and present disposal issues, regardless of rechargeable technology.
As a result, there is a clear need to explore novel alternatives to power sensor networks/nodes, as existing battery technology hinders the widespread deployment of these networks. By harvesting energy from their local environment, sensor networks can achieve much greater run-times, years not months, with potentially lower cost and weight.
Power for wireless sensor nodes can be split into two main technology categories: energy storage and energy harvesting. This paper reviews the state-of-the art technology in each of these fields, outlining different powering options for sensor nodes. These include energy storage utilizing batteries, capacitors, fuel cells, heat engines and betavoltaic systems and energy harvesting methodologies including photovoltaics, temperature gradients, fluid flow, pressure variations and motion harvesting.
Energy storage is the basis of present technology and involves powering the sensor node from energy stored at the node; a key example of this is batteries. This energy may be stored in different forms ranging from electrical charge to hydrocarbon based fuels. By itself, energy storage cannot deliver energy indefinitely, as at some stage the energy will be depleted and need replenishing. The metric used for comparison of these devices is their average energy density, Joules per unit volume; typically this is J/cm3.
Energy harvesting is a newer approach and relies on technology to gather energy from the surrounding environment using, for example, solar cells or fluid turbines. It involves converting the ambient energy inherent in the sensor node's environment into electrical energy. By doing so, a sensor node will have the opportunity to extend its life to a range determined by the failure of its own components rather than by its previously limited power supply. The metric used for comparison of energy harvesting devices differs from that used for energy storage as they don't have a fixed amount of energy intrinsic to their volume. Therefore, energy harvesting devices will be rated on their average power density or Watts per unit volume, W/cm3, rather than their average energy density.
In general, energy harvesting will not directly power a sensor. This may be because the levels of power are too low, or it may be as a result of the power being in the wrong form. Typically, sensors and nodes require a voltage in the range 2 – 10 V and peak direct current of approximately 100 mA. Some energy harvesting techniques generate much higher voltages, produce AC power, or simply do not have sufficient power to run the node directly. The result of this is that electronics are required to condition the power for the device and, critically, secondary energy storage in the form of capacitors or rechargeable batteries will be required. Section 4 deals with issues of power conditioning.
Many of the power options involve taking a technology which has been proven on large scale applications and scaling it down to dimensions suitable for the sensor node. This approach often runs into technical difficulties due to different effects which come into play at smaller scales. Some of these effects, which are detailed in this report, include thermal effects as a device's ratio of surface area to volume changes, viscosity issues involving fluid flow at smaller scale and problems related to increasing volume taken up by battery connectors, packaging and other essential hardware. However, through the persistent work of researchers, many technologies have overcome these obstacles and are nearing fruition.
It should be noted that in the context of this review, the term micro-scale is used to describe nodal elements with sizes of approximately 100 mm on a side, masses of less than 100 gm (not including batteries or associated transducers) and power requirements of less than 100 mW.
To give examples of the energy requirements of sensor nodes,
Table 1 shows a number of commercially available nodes and their various levels of power consumption.
The Fleck3 is a CSIRO product and a range of data was easily sourced, unlike the XBeeTM and MICAzTM which are both commercial products, for which full specifications were unavailable. The power consumption is very dependant on the various transmit/store duty cycle components and should not be interpreted as a measure of the efficiency of the device. Note that the nodes in
Table 1 are often able to operate at lower power consumption. It is not the purpose of this review to compare individual nodes and manufacturers. Rather, the purpose of
Table 1 is to indicate the relative amount of energy required for each node, for the following arbitrary duty cycle: In every 3 minute cycle, 1% (1.8 s) listening, 20 ms transmit time, and the remainder (178.18 s) sleeping.
The final two columns in
Table 1 show the number of alkaline AA cells needed to power the node and the length of time they will last for the given duty cycle. Alkaline AA cells were chosen as alkaline chemistry is well established, has a reasonable shelf life, AA cells offer a good trade-off between capacity and size (2850 mAh from 8.3 cm
3 [
2]) and that most readers would have some familiarity with them as they are commonly used in household devices. Note that the values quoted in
Table 1 do not allow for powering sensors connected to the device. Typically, the power requirements of some sort of physical sensor to measure temperature or humidity, for example, need to be considered. The magnitude of this power could easily exceed the power requirement of the node itself, effectively halving the battery life.
2. Energy Storage
2.1. Batteries
The most common power sources for wireless sensor nodes are batteries. Batteries combine good energy density with a range of commercially available sizes while also supplying their energy at precisely the voltage levels required of modern electronics, eliminating the need for intermediate power conditioning electronics. A battery can store energy chemically and can release it as electricity through a chemical reaction which transfers electrons from its anode to its cathode. The power output of a particular battery is limited by a number of factors including: the relative potentials of the anode and cathode materials, and the surface area of the electrodes.
Batteries can be classed in two main categories, primary and secondary. Primary batteries are not easily recharged using electricity, while secondary batteries can reverse the chemical reaction through a recharging process whereby energy is delivered back into the battery and stored in the form of chemical bonds.
When using primary batteries the lifetime of the sensor node is determined by the fixed amount of energy initially stored in the battery. The amount of energy stored depends on the energy density and volume of the battery. For sensor node applications, it is desirable to minimise the volume, and with improvements in battery energy density reaching a plateau, batteries are forcing a large trade-off between the node's lifetime and its volume.
The capacity of a battery is specified by the manufacturer and is achieved by the use of specific discharge rates. Each manufacturer can use their nominated methodology, of which there are many. As an example based on [
2], the following is used for non-rechargeable batteries: A discharge rate of 25 mA is applied until the voltage reaches 0.8 V. The time in hours that is taken is then multiplied by the discharge rate (25 mA) to calculate a milliamp-hour (mAh) capacity. An alkaline battery that cannot be recharged has effectively reached the end of its life at 0.8 V. It still contains significant ‘overhead’ energy but this energy is unable to be used. When the battery is thrown out this energy is effectively wasted. This does not apply to rechargeable batteries, as they can be topped up hundreds of times.
For rechargeable batteries, a similar methodology is nominated by a manufacturer to achieve the rated capacity. For example [
2] bases their capacities on a 0.1 capacity charge followed by a 0.2 capacity discharge. So a rechargeable battery with a stated capacity of 1,000 mAh will only get that capacity if it is charged at a maximum of 100 mA (for 10 hrs) and then discharged at 200 mA (for 5 hrs). Other examples of discharge rates include a 1 hour rate and a 20 hour rate. Thus a 1,000 mAh battery will achieve this capacity using the 1 hour rate if discharged at 1,000 mA. The 20 hour rate is typically used on sealed lead acid batteries as they do not perform well at the 1 hour rate. Importantly, a battery will only achieve the nominated capacity if discharged at the nominated rate. A higher or lower discharge rate will result in a different capacity due to internal energy changes. Typically if a lower discharge rate is used then the battery will supply a slightly higher capacity. This is important for wireless nodes as they typically consume much less than the nominated discharge rate, and thus the battery should last slightly longer than predicted from the capacity. At very low discharge rates shelf life becomes an issue which is addressed below.
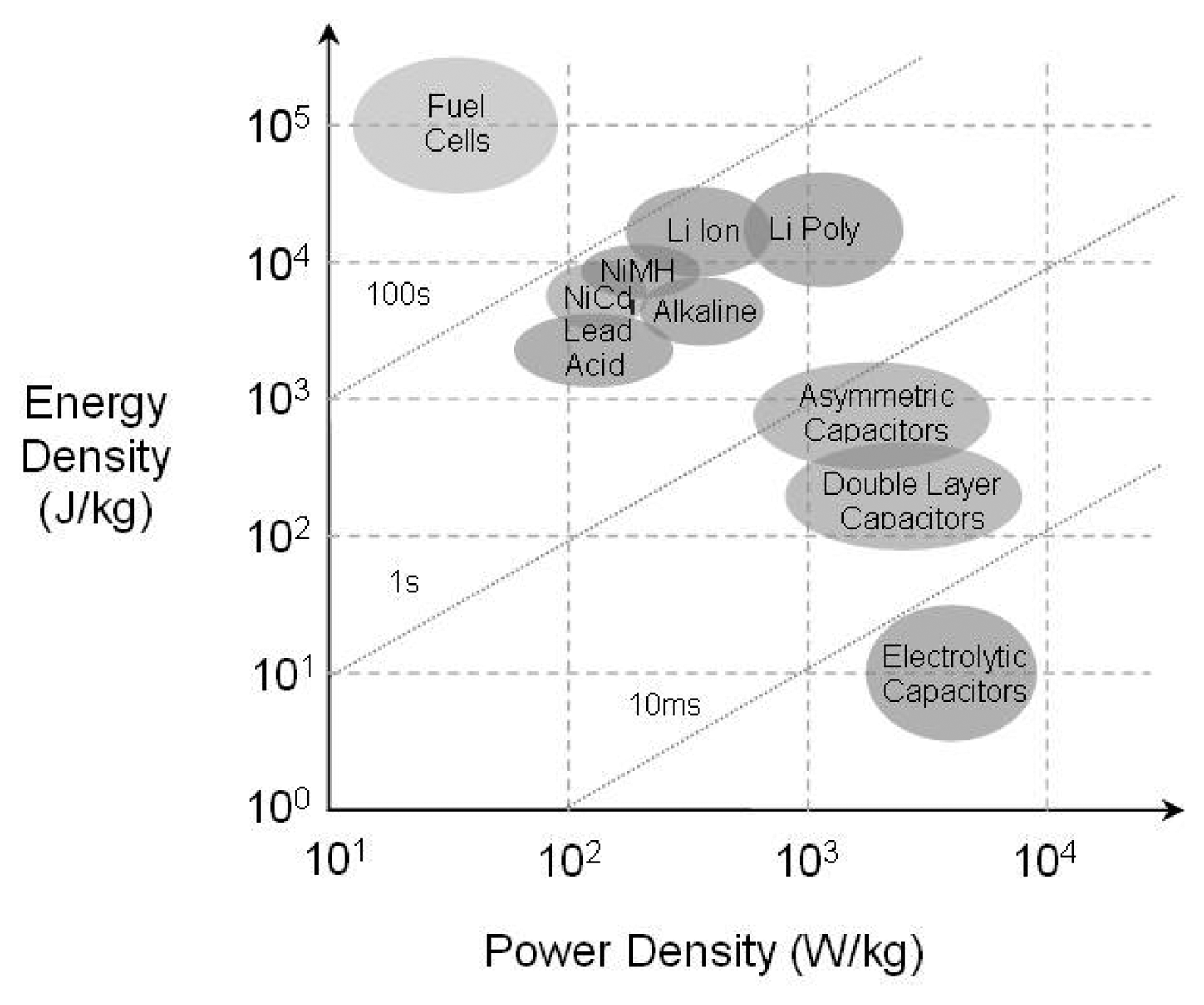
Like primary batteries there are different types of secondary batteries whose characteristics are determined by their internal chemistries. Conventional chemistries such as Nickel-Zinc (NiZn), Nickel Metal Hydride (NiMH) and Nickel-Cadmium (NiCd), offer high energy densities and good discharge rates, but with the disadvantages of short cycle life and adverse “memory” effects. Lithium-ion batteries overcome these drawbacks, with a higher energy density and discharge rate, higher cell voltage, longer cycle life and elimination of “memory” effects [
3]. However their major disadvantage is the particular care required when recharging to avoid overheating and permanent damage.
Figure 1 shows the relative strengths of the different battery chemistries in terms of their energy and power densities.
Some battery chemistries have problems with shelf life. Standard alkaline batteries have shelf lives of around seven years; while newer lithium based systems (both primary and secondary) have even longer lives. Other secondary (rechargeable) chemistries like Nickel Metal Hydride (NiMH) lose 1 − 2% of their capacity per day of storage.
Secondary batteries provide the option of extending the sensor node's lifetime, relative to that of a primary battery, through their recharging ability. However, this means they need to run in conjunction with another device capable of supplying power. This arrangement is usually desirable as quite often the device supplying the power does so intermittently. A battery can store these bursts of energy and provide the electronics with a stable constant energy interface. A robust system will require electronics to control the charging and discharging of the battery in a way that maximises its life as incorrect charging profiles diminish the battery's usable life.
Two promising new fields of research in battery technology are micro-batteries and flexible batteries. Micro-batteries seek not only to reduce the size of the actual battery but also to improve integration with the electronics they are powering. The goal of micro-batteries is therefore to produce a battery on a chip. The main challenge is overcoming small power outputs due to the surface area limitations of micro-batteries, however work into three-dimensional surfaces seem promising [
9]. The second field involves a new breed of lightweight flexible batteries [
48] which can be moulded to any shape allowing them to serve a double purpose of acting as structural material, thus reducing the total volume of the sensor node.
2.2. Capacitors
Capacitors store energy in the electric field between a pair of oppositely charged conductors. They have significantly higher power density than batteries, as they are able to charge and discharge over much shorter periods of time. However, their energy density is two to three orders of magnitude lower. This makes capacitors ideal for providing short bursts of high power with low duty cycles giving the capacitor time to recharge before the next burst of power is needed.
This effect may mean a combination of capacitor and battery could solve the power requirement across a normal nodal duty cycle. A battery can be used to provide the low power requirements on sleep and receive mode, while a capacitor can provide the high power required for RF transmission on short duty cycles.
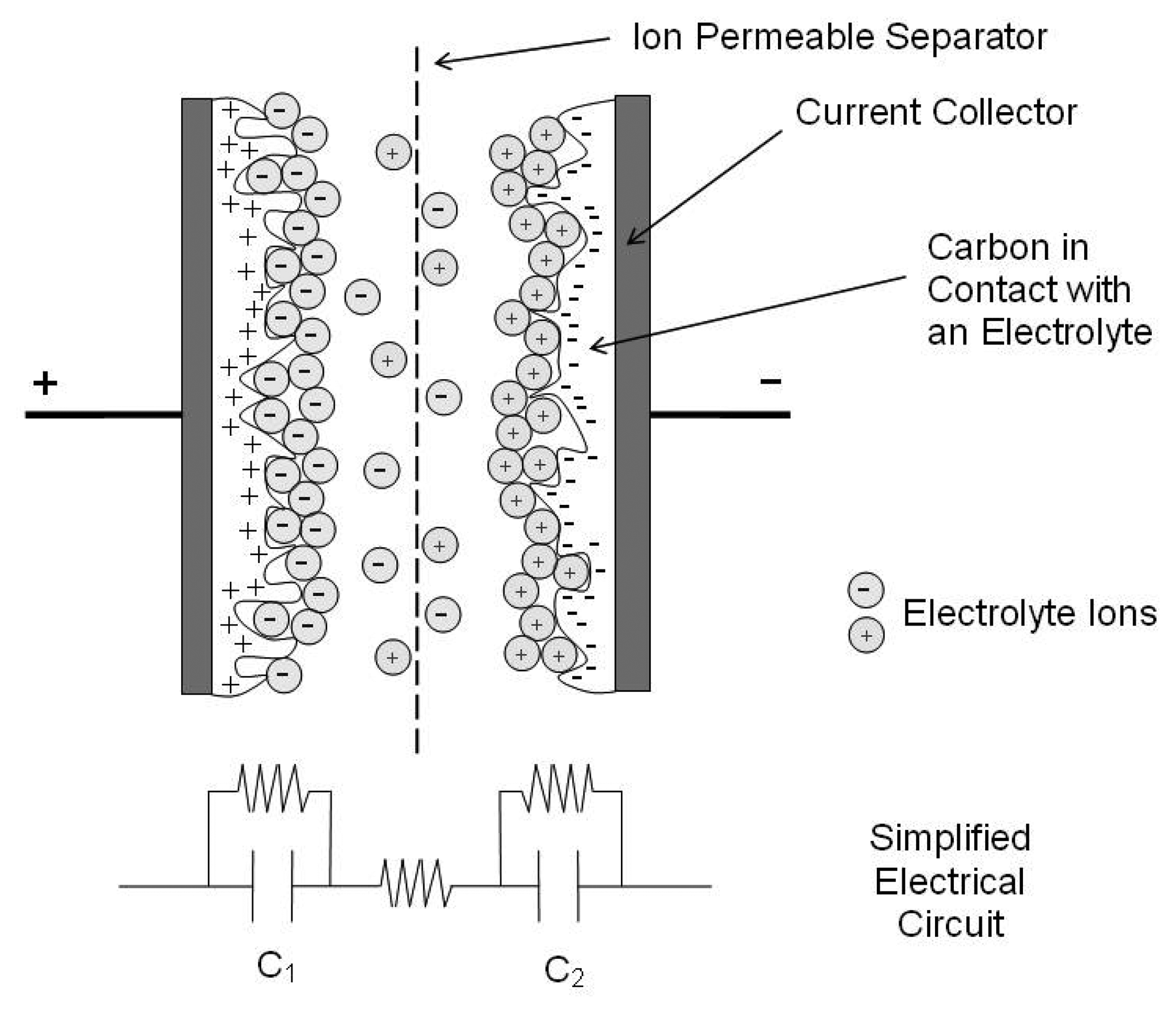
Continued research into capacitors strives to increase their energy density, with a new breed of supercapacitors.
Figure 2 shows a charged supercapacitor. The critical difference between a supercapacitor and a standard capacitor is in the surface area supplied by the electrode and the thinness of the double layer formed at the electrode-electrolyte interface. In a standard capacitor the area is simply the surface area of a nominally flat plate. However, the use of porous materials such as carbon effectively increases the surface area of each electrode enormously. This allows capacitors with values of the order of 2000 F in packages approximating standard battery sizes.
The simplified circuit shown in
Figure 2 hints at a further improvement: Capacitors in series add such that the total capacitance of a cell is given by:
Thus, for a supercapacitor both C
1 and C
2 are large and this leads to a C
CELL approximately half the size of C
1 or C
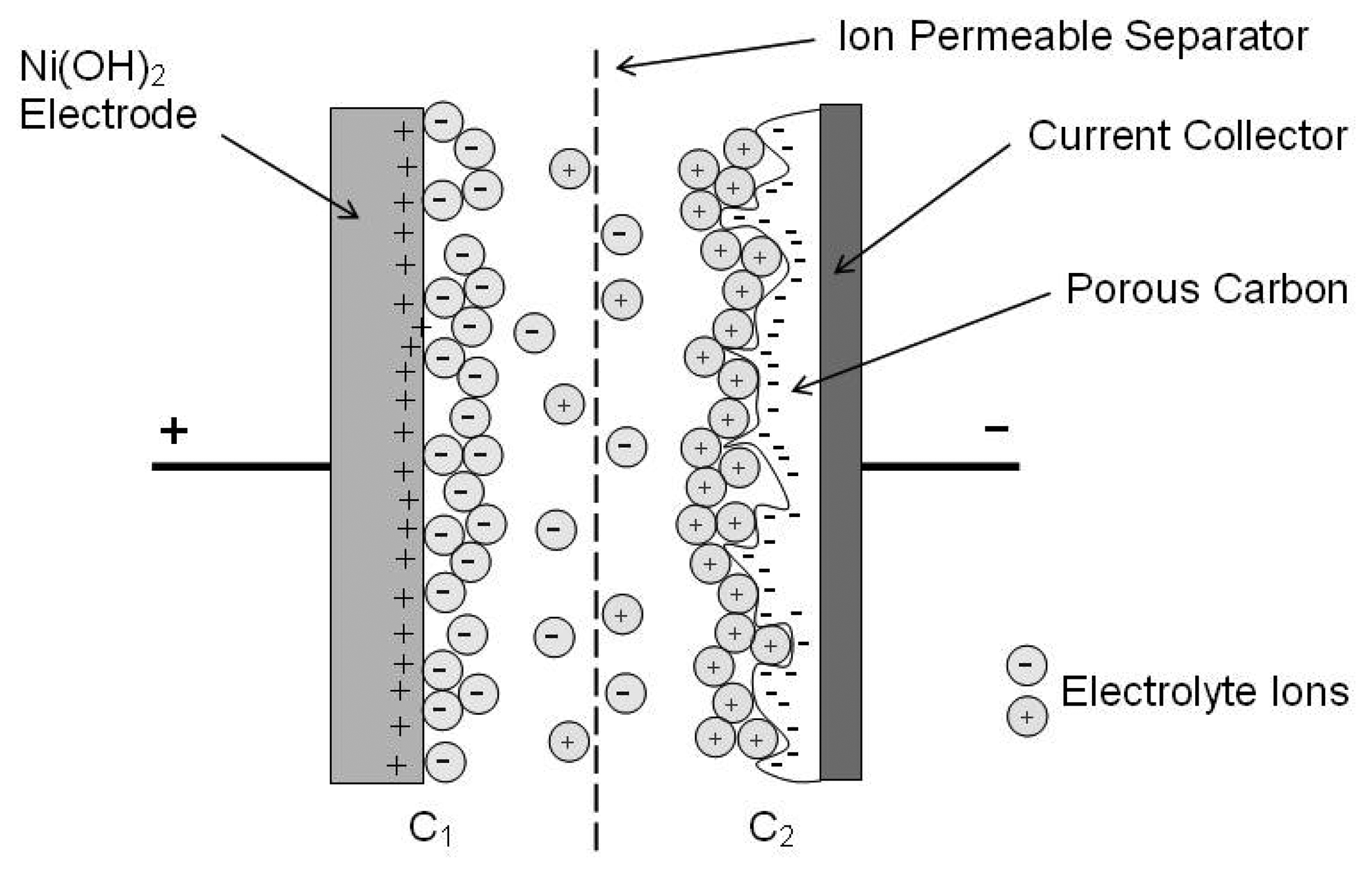
2. This has lead to the development of so called asymmetric capacitors, as seen in
Figure 3. An asymmetric supercapacitor typically consists of a battery type electrode (usually a faradaic or intercalating metal oxide) and an electrochemical capacitor type electrode (high surface area carbon). In such an arrangement, the carbon electrode has a much greater capacity than the battery electrode. Thus C
CELL approaches the capacitance of the carbon electrode alone, resulting in a much larger energy storage capability of a comparable symmetric carbon based supercapacitor. This has lead to development of cells with capacitance values in excess of 8,000 F.
The increase in capacitance values has led to energy storage capabilities approaching that of some battery chemistries, such as lead-acid storage cells, and power storage capabilities and order of magnitude greater. Critically, the efficiency of capacitors exceeds 90% while batteries have typical values of 60–70%.
There has also been recent work by CSIRO into a combination of lead acid battery and supercapacitor [
6]. Although the specific application here is for hybrid cars, the technology should be applicable to sensor nodes.
Figure 1 shows a comparison of the energy and power densities of the energy storage devices just discussed: capacitor, supercapacitor and battery.
Some supercapacitors are capable of more than 500,000 charge cycles before noticeable deterioration (compared with about 1,000 for rechargeable batteries) [
6]. This factor, along with short charging times and high power densities, make supercapacitors attractive as secondary power sources in place of rechargeable batteries in some wireless sensor network applications [
7].
2.3. Micro-Fuel Cells
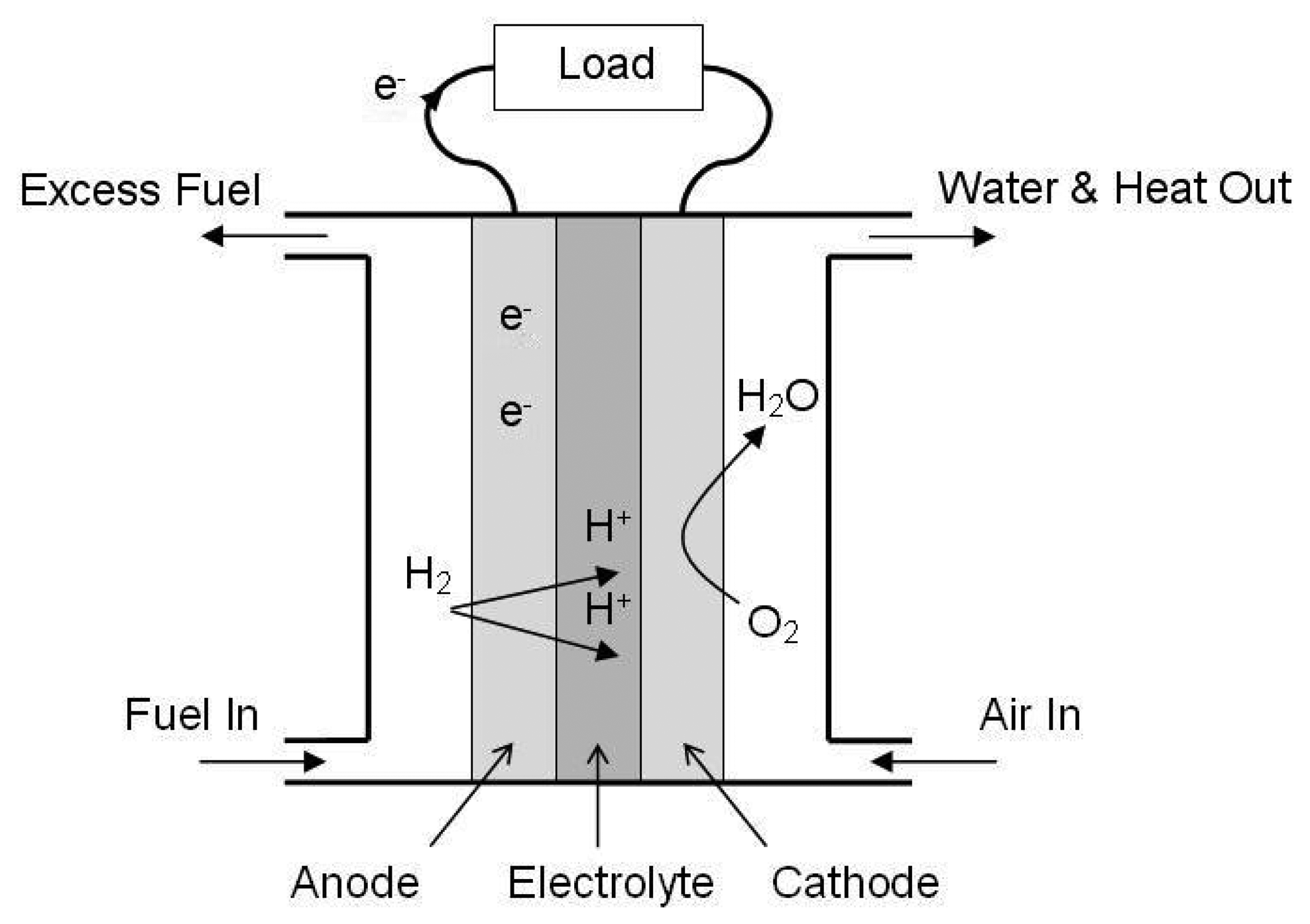
Like batteries, fuel cells convert stored chemical energy into electricity. Generally, liquid fuels have much higher energy density than battery chemistries. In the fuel cell, such as the one shown in
Figure 4, a catalyst promotes the separation of the electrons from the protons of hydrogen atoms drawn from the fuel. The electrons are then available for use by an external circuit, while the protons diffuse through an electrolyte to recombine with the electrons and oxygen on the other side producing water molecules [
7]. This technology was pioneered for the NASA space program and has been used on large scales for decades but recent work has focused on reducing their size to replace consumer batteries [
8].
As with batteries, the major performance restriction of micro-scale fuels cells results from the small electrode surface area. An opportunity may exist to combine the work of Hart
et al. [
9] involving three dimensional surfaces in battery electrodes, with the noted shortcomings of fuel cell electrodes. Another hindrance is the plumbing for the fuel reservoir which at micro-scales is seen as a harder task than micro-fabricating the electrodes. The main issue here is due to flow considerations and ensuring that the fuel flows throughout the cell particularly to the finer tubing at the extremities.
Matsushita Battery has developed a direct methanol fuel cell (DMFC) incorporated with a lithium ion battery. This system is approximately 400 cm
3, with peak output of 20 W and an average of 13 W [
49]. This corresponds to a average power density of 0.03 W/cm
3. Angstrom Power has completed a six month test program using a hydrogen fuel cell. The fuel is supplied as hydrogen absorbed in a metal hydride. The volume of the fuel storage is around 6 cm
3, and the fuel cell itself can be made in many forms. The two presently available are a cylindrical, 1 W unit with a volume of 10 cm
3, and a rectangular 0.38 W unit with a volume of 2.5 cm
3 [
50]. The average power densities for these, including the fuel storage, are 0.06 W/cm
3 and 0.04 W/cm
3, respectively.
2.4. Radioactive Power Sources
The use of radioactive materials as a power source is attractive due to their extremely high average energy densities, approximately 10
5 kJ/cm
3 [
10]. Like many other power sources it has been used in the large scale for decades but has not yet fully transferred down to a scale useful for sensor nodes. The main technical reason for this is the lack of a high conversion efficiency mechanism at the micro-scale.
Early research into small scale radioactive energy conversion focussed on thermal heating using the kinetic energy of emitted particles. The heat could be converted into electricity using thermoelectric or thermionic techniques which require high temperatures (300 – 900 K) for efficient operation. This scheme works well for operations requiring power in the Watt to kilowatt range but doesn't scale down for micro-power applications since with reducing size, the surface-to-volume ratio increases, leading to high heat leakage to the surroundings, i.e. thermal heat management at the micro-scale is a tough engineering challenge [
11].
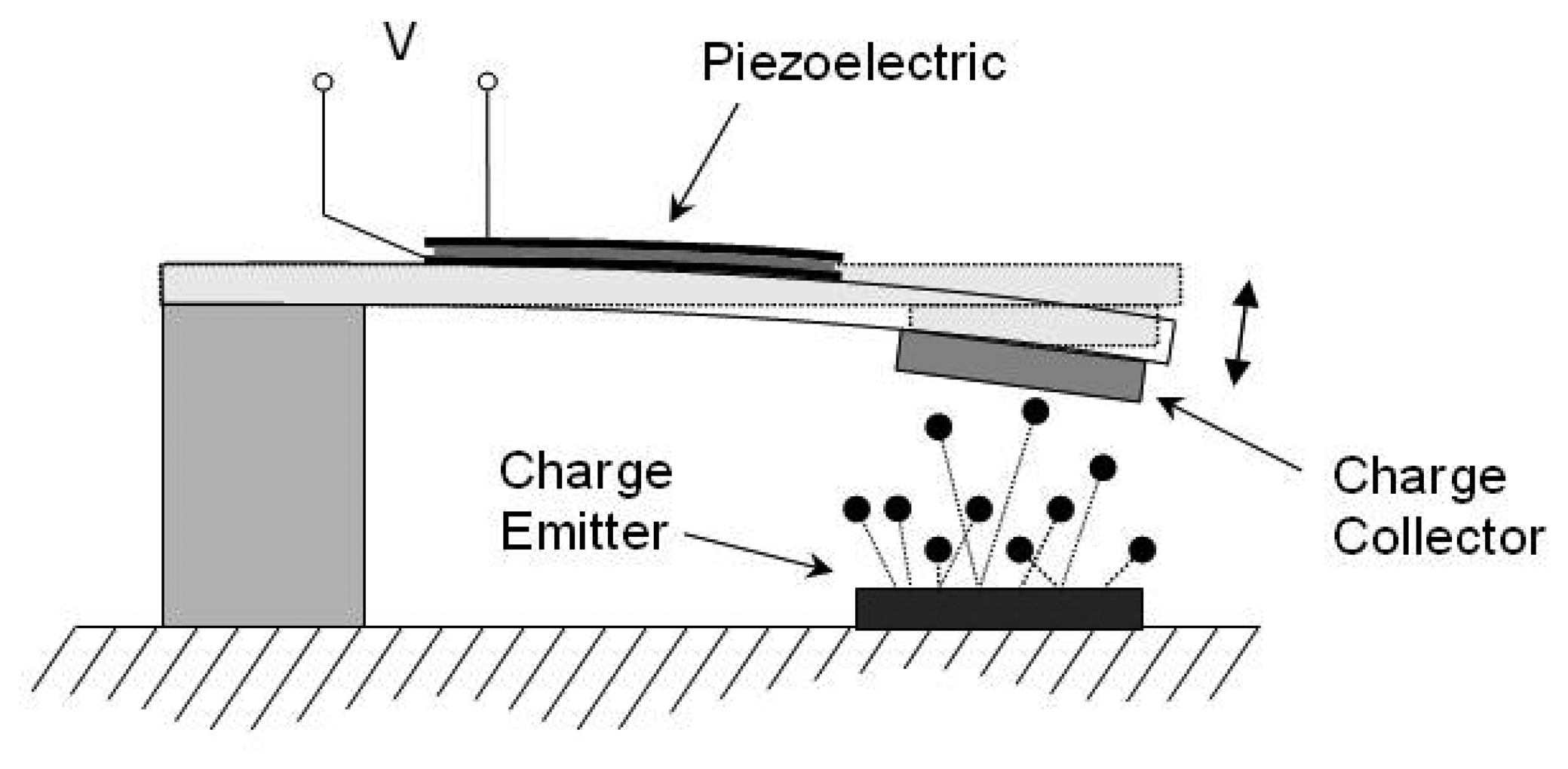
To date the most promising work for applications in powering wireless sensor nodes is by Lal
et al. [
11] where they have used a radioactive isotope to actuate a conductive cantilever. As shown in
Figure 5 the emitted electrons collect on the cantilever which causes an electrostatic attraction forcing the cantilever to bend towards the source. When contact is made the charge differential is dissipated and the cantilever oscillates about its equilibrium position. A piezoelectric plate will convert the mechanical energy of the oscillation into electrical energy. They have demonstrated a power conversion efficiency of 2 − 3% using this radioactive-to-mechanical-to electrical conversion cycle with power outputs in the tens of microwatts, which could power low-power electronics or trickle charge a battery or capacitor.
The weakness of useable radioactive sources is their low power density. Typically, the longer the half-life of an element, the lower the power density. As such they do not by themselves offer a standalone solution to the powering of sensor nodes. However, they are an extremely consistent power source with long lifetimes governed by the half-life of the source which in some cases can be centuries. Because of this they are often put into the energy harvesting category, but strictly speaking they are in fact an energy storage source. Possible uses include extending the life of batteries, charging capacitors, or providing power to applications which need very low power. Due to safety concerns the use of radioactive material is a highly political and controversial topic. As
Table 2 shows, although some groups of betavoltaics offer good power density, they also require extensive shielding.
The company BetaVoltaic Industry [
12] has indicated that the energy sources shown in
Table 2 are probably only suitable for military or space applications and they are investigating other beta sources such as Potassium-40, Molybdenum-100 and Zinc-70. However, other references indicate that Potassium- 40 has substantial gamma radiation (about 11% of all decay events) [
14], and Zinc-70 is a stable isotope that does not undergo radioactive decay [
14]. Zinc-69 is a beta emitter, but with a half-life of less than 1 h. These factors would seem to preclude these elements from a civilian betavoltaic battery system.
The isotope used in Lal
et al. [
11] is Nickel-63. When a calculation to determine the power capacity of this isotope was completed it revealed power density orders of magnitude less than those quoted in
Table 2. It is unclear what the sources of error are. However, the system in Lal
et al. [
11] has been peer reviewed.
It should be noted that there are a number of misconceptions about beta sources of radiation. Although generally less dangerous than gamma emitters, beta sources are still capable of high levels of activity, and in general they should not be handled without adequate protection. The Australian Radiation Protection and Nuclear Safety Authority (ARPANSA) list all of the elements in
Table 2, except Cerium-144, Nickel- 63 and Thallium-204 as “Highly Radioactive Sources” if they exceed a defined activity level [
15]. This definition is used to determine if a substance needs an
export permit. All radioactive substances require an
import permit to Australia.
A second level of hazard comes from the use of lead shielding. Because lead shielding is very effective at slowing down the beta particle it can release a secondary source of radiation. This is similar to X-rays and is called bremsstrahlung, literally brake radiation.
In order to reduce the levels of this secondary radiation, it is suggested [
16] that materials of low mass number, such as aluminium or plastic, are used as shielding. A shield of 10 mm thick Perspex or 3 mm thick aluminium is suggested. The cited reference gives an example of a 1.7 MeV phosphorus source. That would re-emit 4.6% of its energy as bremsstrahlung with lead shielding but less than 1% with aluminium and less than 0.5% with Perspex. Perspex has the added advantages of being transparent and easier to clean.
4. Power Conditioning Considerations
None of the energy harvesting techniques outlined in Section 3 produces stable DC power readily useable by the node. As such each technology needs to employ a power conditioning strategy to transition from the raw energy outputted from the harvester to an interface useable by the node. The following section outlines power conditioning aspects for the particular case of vibration energy harvesting. For the sake of brevity only vibration energy harvesting will be considered, as the reported techniques can be easily carried over to other energy harvesting technologies.
The electrical energy created by the vibration energy harvester needs to be conditioned before being used or stored for later use by the sensor node. One method for conditioning the electrical energy is to use a passive rectifier. Passive rectifiers consist of a diode bridge and a large filter capacitor [
39] to [
41]. The diode bridge provides the same polarity of output voltage for any polarity of the input voltage. The filter capacitor helps smooth the output voltage from the load.
In order to improve the harvesting efficiency of this rectifier technique, researchers have added a dc-dc converter [
40], as shown in
Figure 15. By controlling the switching duty cycle of the dc-dc converter via a control algorithm Ottman
et al. [
40] found harvesting efficiencies (i.e. mechanical-to-electrical conversion) could be greatly increased. Although, Ottman
et al. report a 325% increase in harvested power over the passive diode bridge technique for periodic disturbances, their results are not a harvesting efficiency, rather they are the improvement across the dc-dc converter.
Under laboratory conditions the passive rectifier dc-dc converter technique looks encouraging as it attempts to crudely consider the dynamics of electromechanical (or vibration energy harvesting) systems, and adapt to slow changing disturbances (less than 1 Hz). However, the technique fails when vibration disturbance are quasi periodic and/or broadband.
Vibration sources are often assumed to be periodic which also limits the applicability of present vibration energy harvesting techniques. Not only are most ‘real-life’ vibration sources broadband, the dynamics of the electromechanical system (mechanical structure, transducer, rectifier circuitry and load) also vary with changing operating and environmental conditions, such as temperature, which can affect the harvesting performance [
42] and [
43]. Additionally, harvesting performance is also affected by transducer nonlinearities, in particular electroactive polymer materials such as Polyvinylidene Fluoride (PVDF).
Despite the net generation of electrical energy from a transducer with a passive rectifier dc-dc converter technique [
39] and [
41], the transducer still needs to overcome the semiconductor diode voltage drop of the rectifying/conditioning circuit before vibration energy can be harvested. This voltage drop is typically 0.6 volts and therefore the transducer needs to generate a voltage greater than 0.6 V before an electrical current can be harvested or flow into the load. This is critical when vibration energy harvesting systems utilize a transducer with low internal impedance such as electromagnetic transducers.
In an attempt to overcome diode voltage drop and broadband issues for shunt vibration control, Fleming
et al. [
42] developed a novel active rectifier to simulate shunt impedances. The technique was initially proposed as a self-powering shunt impedance, as shunt vibration controls are required to simulate large reactive impedances, of the order of kHz. Fleming's
et al. self-powering shunt demonstrated that it could simulate impedances and provide vibration control to a mechanical structure, however, it was unable to power itself. It appeared the self-powering shunt controller could not be autonomous due to the highly reactive electrical power flowing around the circuitry for shunt impedances. Despite the lack of autonomy, the potential to increase vibration energy harvesting efficiencies was realised.
Scruggs [
44] also theoretically considers using an active rectifier, similar to that of Fleming
et al. [
42]. Scruggs found that by controlling the voltage and current, or impedance, for the active rectifier the vibration energy harvesting system could be reduced to a standard optimal control problem, which may be solved to maximise the harvesting efficiency performance. This system works well, however, in order to compensate for discrepancies in the model, operating and environmental changes in the system, the controller is ‘de-tuned’, and hence reduces the effective harvesting efficiency performance.
In order to address the changing operating and environmental conditions, as well as the broadband issues, a novel adaptive vibration energy harvesting technique was proposed by Ward
et al. [
45]. The technique demonstrated the use of an adaptive learning algorithm to maximise the amount of vibration energy available i.e. increase the energy harvesting performance. Results of an experimental apparatus using an electromagnetic transducer showed harvesting (mechanical-to-electrical energy conversion) efficiencies of 27 − 34%.
While most researchers have been concerned with rectifier circuit efficiency, some researchers have attempted to investigate the harvesting efficiency i.e. mechanical-to-electrical energy conversion [
45] and [
47]. Ultimately the cost, size, weight and energy output of vibration energy harvesting will be important for wireless sensors nodes.
5. Discussion
This review has identified the developing problem inherent with present energy and power supply methods for wireless sensor nodes. One issue is modern battery energy densities failing to improve at the same rate as other components in a wireless sensor node. This leads to existing sensor node volumes being dominated by that of the battery volume. In addition, the power demands of sensor nodes can range up to 6 orders of magnitude. This range is caused by the varying power demands of different modes, such as transmission, data collection or reception of signals. To further complicate the issue, these modes are done varying duty cycles. Recent solutions involve catering for the largest demand leaving the power system massively over sized for large portions of the node's operating time.
Reviewing the work into power technologies for sensor nodes reveals that there are many different approaches which seem to have the capability of solving the aforementioned problems. Energy harvesting delivers long life, while micro-batteries provide back-up power and micro-supercapacitors enable high power pulses. However, to date there is no ‘one size fits all’, robust system available on the marketplace to provide power for wireless sensor networks for an arbitrary application. One reason for this is due to the bulk of research focusing on one particular technology only for the solution. The problem with this is that in scenarios where one technology may thrive, others may fail, while in a different scenario the first technology may fail while others thrive. This has the effect of making these power systems very application specific. This seems to call for a power system which utilises a hybrid solution of many different technologies able to cater to any scenario. In the last few years this idea has been investigation with papers starting exploration of this scheme [
51] to [
54].
Research thus far into hybrid power solutions for wireless sensor nodes has been elementary, mostly outlining the potentials and benefits of such systems but failing to get into the detail of how such systems would be optimised. The problems faced in the integration of individual energy storage and harvesting technologies for varying power loads is similar to that of faced by distribute energy or micro-grids. Just as a micro-grid relies on smart software and electronics to integrate numerous sources and loads, to control and manage energy and power, and to provide system stability, so to should the sensor node's “nanogrid” rely on such smart aids to ensure its optimal operation.
Short of a ‘one size fits all’ solution for powering sensor nodes, designers need to choose the right mix of energy storage and harvesting options for their particular application. Once again, drawing inspiration from micro-grids reveals the strength of the National Renewable Energy Laboratory's (NREL) HOMER™ software. HOMER™ is considered to be one of the world's most powerful and widely used micro-power design models. HOMER™ simulates and optimises stand-alone and grid-connected power systems comprising any combination of wind turbines, photovoltaic (PV) arrays, run-of-river hydro power, biomass power, internal combustion engine generators, micro-turbines, fuel cells, batteries, and hydrogen storage, serving both electrical and thermal loads [
55]. A similar software package for use by sensor network “nanogrid” designers would prove beneficial.
Some of the individual technologies themselves showed areas of achievable improvements. As mentioned in the vibration harvesting section work into dynamic resonant tuning of the oscillating harvester is lacking as well as a harvester with more than one degree of freedom. Also there seems to be some synergy between the harvesting techniques employed for vibrations and the radioactive actuated piezoelectric cantilever, perhaps a device could be made incorporating both giving the advantage of the consistent power supply of the radioisotope to balance out the intermittent, stochastic nature of the vibration source, and the advantage of high power density of vibration harvesters to balance out the low power density of the radioisotope.
The use of flexible batteries and flexible solar cells seems beneficial due to their ability to double as structural components for sensor networks. This factor may allow them to be used as part of the node structure and thus cut down on volume and mass of the node. The use of temperature differentials was discussed; unfortunately however the low efficiencies that come with environmental differentials of approximately 10 K may limit the use of this source of energy except for specific applications near heat sources. Finally, two energy harvesting techniques were found for which no research could be uncovered at the micro-scale. These were wind power and pressure variations. At the micro-scale these may offer some interesting areas of study. Due to the scaling issues the utilisation of these forms of energy at this scale may require altogether different technologies.
Table 4 is a summary of technologies discussed in this review. Generally, all technologies will require secondary storage except batteries, capacitors and fuel cells. Capacitors are similar to rechargeable batteries, although with differing volumetric power and energy measures. Fuel cells are similar to primary batteries, except for the use of a liquid fuel rather than a chemical paste.
Commercial availability is a determination of whether a member of the non-scientific community can buy the product. All of the noted technologies, except those involving pressure gradients, are available at an academic level. Finally, it should be noted that most technologies have a very wide range of available performance figures. This is a reflection of the wide range of methodologies that exist even within the same general theme. As technologies mature, these levels of variance should be expected to narrow.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}