Wireless Monitoring of Automobile Tires for Intelligent Tires

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Tire pressure monitoring systems
2.1. Indirect pressure monitoring
2.2. Direct pressure monitoring
3. Advanced intelligent tires
3.1. Indirect tire monitoring
3.2. Direct tire monitoring
4. Wireless data transmission
4.1 Active wireless transmission
4.2. Energy harvesting
4.3. Passive wireless transmission
5. Conclusions
References
- National Highway Traffic Safety Administration. Proposed new pneumatic tires for light vehicles FMVSS No. 139. 2001.
- Title 49 United States Code 30101. Transportation Recall Enhancement, Accountability, and Documentation (TREAD) Act; Public Law 106-414-NOV.1, 106th Congress, US, 2000. [Google Scholar]
- Smith, J.A.; Moore, J.S.; Holmbraker, S.; Bartlett, A.J.; Campbell, W.A. Tiresafe product overview; NHTSA-00-8572-1; National Highway Traffic Safety Administration, 2000. [Google Scholar]
- Grygier, P.; Garrott, W.R.; Mazzae, E.N.; Ur, J.D.M.; Hoover, R.L.; Elsasser, D.; Ranney, T.A. An evaluation of existing tire pressure monitoring systems; DOT 809 297; National Highway Traffic Safety Administration, 2001. [Google Scholar]
- Mazzae, E.N.; Ranney, T.A. Development of an automotive icon for indication of significant tire under-inflation. Proceedings of Human Factors and Ergonomics Society Annual Meeting, Minneapolis, USA; 2001; pp. 1641–1645. [Google Scholar]
- MacIsacc, J.D.J.; Garott, W.R. Preliminary findings of the effect of tire inflation pressure on the peak and slide coefficients of friction; DOT 809428; National Highway Traffic Safety Administration, 2002. [Google Scholar]
- National Highway Traffic Safety Administration. Federal motor vehicle safety standards; tire pressure monitoring systems; controls and displays NHTSA-2000-8572. 2000.
- National Highway Traffic Safety Administration. Federal motor vehicle safety standards; tire pressure monitoring systems; controls and displays NHTSA-2005-20586. 2005.
- Persson, N.; Ahlqvist, S.; Forssell, U.; Gustafsson, F. Low tyre pressure warning system using sensor fusion. SAE Conference Proceedings on Automotive and Transportation Technology Congress Exposition, Barcelona, Spain; 2001. 2001-01-3337. pp. 77–79. [Google Scholar]
- Minf, K. A smart tire pressure monitoring system. Sensors 2001, 18, 40–46. [Google Scholar]
- Umeno, T.; Asano, K.; Ohashi, H.; Yonetani, M.; Naitou, T.; Taguchi, T. Observer based estimation of parameter variations and its application to tyre pressure diagnosis. Control Eng. Pract. 2001, 9, 639–645. [Google Scholar]
- Yamagiwa, T.; Orita, M.; Harada, T. Development of a tire pressure monitoring system for motorcycles. JSAE Rev. 2003, 23, 495–496. [Google Scholar]
- Cullen, J.D.; Arvanitis, N.; Lucas, J.; Al-Shamma'a, A.I. In-field trials of a tyre pressure monitoring system based on segmented capacitance rings. Measurement 2002, 32, 181–192. [Google Scholar]
- Halfmann, C.; Ayoubi, M.; Holzmann, H. Supervision of vehicles' tyre pressures by measurement of body accelerations. Control Eng. Pract. 1997, 5, 1151–1159. [Google Scholar]
- Siddons, J.; Derbyshire, A. Tyre pressure measurement using smart low power microsystems. Sensor Rev. 1997, 17, 126–130. [Google Scholar]
- Gustafsson, F.; Drevo, M.; Forssell, U.; Lofgren, M.; Persson, N.; Quiklund, H. Virtual sensors of tire pressure and road friction. SAE Tech. Papers 2001, 2001-01-0796. [Google Scholar]
- Kowalewski, M. Monitoring and managing tire pressure. IEEE Pontentials 2004, 23, 8–10. [Google Scholar]
- Garrott, W.R.; Forkenbrock, G.J. Testing the effects of tire pressure monitoring system minimum activation pressure on the handling and rollover resistance of a 15-passenger van; DOT HS 809 701; National Highway Traffic Safety Administration, 2004. [Google Scholar]
- European Transport Safety Council. Road accident data in the enlarged European Union 2006, 1–30.
- Technical Research Centre of Finland (VTT). Intelligent tyre systems - state of the art and potential technologies; Deliverable D7, 2001. [Google Scholar]
- Persson, N.; Gustafsson, F.; Drevo, M. Indirect tire pressure monitoring using sensor fusion. Proceedings of SAE 2002, Detroit, USA; 2002. 2002-01-1250. [Google Scholar]
- Kojima, H.; Ohashi, H.; Kubota, K.; Fujiwara, K.; Tomiita, K.; Umeno, T. Development of tire pressure warning system using wheel speed sensor. JSAE Rev. 1998, 19, 106. [Google Scholar]
- Nabipoor, M.; Majlis, B.Y. A new passive telemetry LC pressure and temperature senosr optimized for TPMS. J. Phys.: Conf. Ser. 2006, 34, 770–775. [Google Scholar]
- Arshak, K.; Morris, D.; Arshak, A.; Korostynska, O.; Kaneswaran, K. Development of oxide thick film capacitors for a real time pressure monitoring system. Mater. Sci. Eng. C 2007, 27, 1406–1410. [Google Scholar]
- Oh, J.G.; Choi, B.; Lee, S.Y. SAW based passive sensor with passive signal conditioning using MEMS A/D converter. Sens. Actuat. A 2008, 141, 631–639. [Google Scholar]
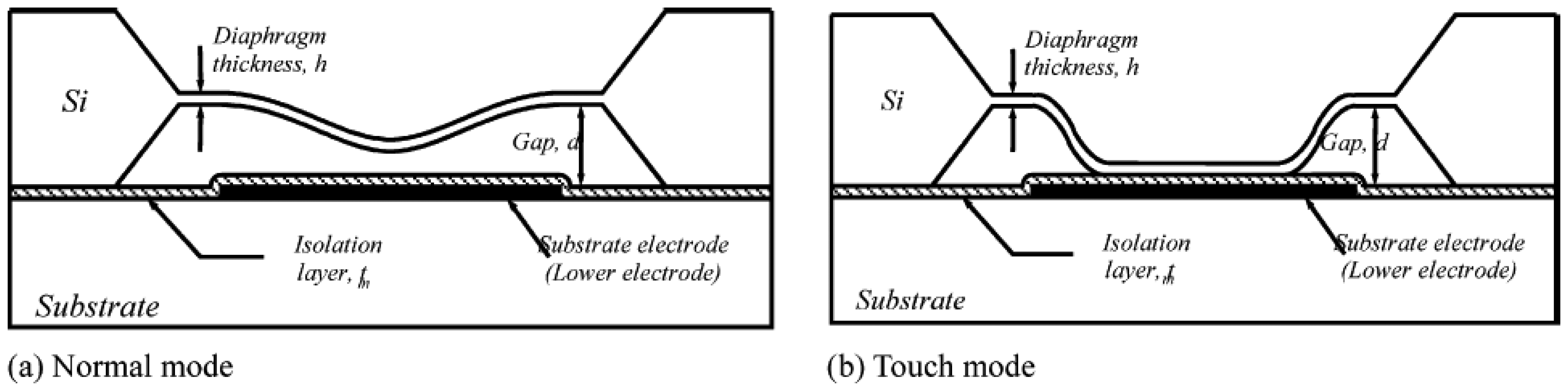
- Wang, Q.; Ko, W.H. Modeling of touch mode capacitive sensors and diaphragms. Sens. Actuat. A 1999, 75, 230–241. [Google Scholar]
- Ko, W.H.; Wang, Q. Touch mode capacitive pressure sensors. Sens. Actuat. A 1999, 75, 242–251. [Google Scholar]
- Wang, Q.; Ko, W.H. Si-to-Si fusion bonded touch mode capacitive pressure sensors. Mechatronics 1998, 8, 467–484. [Google Scholar]
- Yamamoto, S.; Nakao, O.; Nishimura, H. Touch mode capacitive pressure sensor for passive tire monitoring system. Proc. IEEE Sensors 2002, 2, 1582–1586. [Google Scholar]
- Sergio, M.; Manaresi, N.; Tartagni, M.; Guerrieri, R.; Canegallo, R. On road tire deformation measurement system using capacitive-resistive sensor. Proceedings of Second IEEE International Conference on Sensors, Toronto, Ontario, Canada; 2003; pp. 1059–1063. [Google Scholar]
- Magori, V.; Magori, V.R.; Seitz, N. On-line determination of tyre deformation, a novel sensor principle. Proceedings of IEEE Ultrasonics Symposium, Sendai, Japan; 1998; pp. 485–488. [Google Scholar]
- Zhang, X.; Wang, F.; Wang, Z.; Li, W.; He, D. Intelligent tires based on wireless passive surface acoustic wave sensors. Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems, Washington, D.C., USA; 2004; pp. 960–964. [Google Scholar]
- Schimetta, G.; Dollinger, F.; Scholl, G.; Weigel, R. Wireless pressure and temperature measurement using a SAW hybrid sensor. Proceedings of IEEE ultrasonics symposium, San Juan, Puerto Rico; 2000; pp. 445–448. [Google Scholar]
- Pohl, A.; Seifert, F. New applications of wirelessly interrogable passive SAW sensors. IEEE T. Microw. Theory 1998, 46, 2208–2212. [Google Scholar]
- Pohl, A.; Steindl, R.; Reindl, L. The “intelligent tire” utilizing passive SAW sensors -Measurement of tire friction. IEEE T. Instrum. Meas. 1999, 48, 1041–1046. [Google Scholar]
- Palmer, M.E.; Boyd, C.C.; McManus, J.; Meller, S. Wireless smart tires for road friction measurement and self state determination. 43rd AIAA/ASME/ASCE/AHS Structures, Structural Dynamics, and Materials Conference, Denver, Colorado, USA; 2002. AIAA-2002-1548. [Google Scholar]
- Gavine, A. Common sense? The latest in vehicle safety comes courtesy of continental with its potentially life-saving tread deformation sensor. Tire Technol. Int. 2001, 32–33. [Google Scholar]
- Todoroki, A.; Miyatani, S.; Shimamura, Y. Wireless strain monitoring using electrical capacitance change of tire: part I - with oscillating circuit. Smart Mater. Struct. 2003, 12, 403–409. [Google Scholar]
- Todoroki, A.; Miyatani, S.; Shimamura, Y. Wireless strain monitoring using electrical capacitance change of tire: part II - passive. Smart Mater. Struct. 2003, 12, 410–416. [Google Scholar]
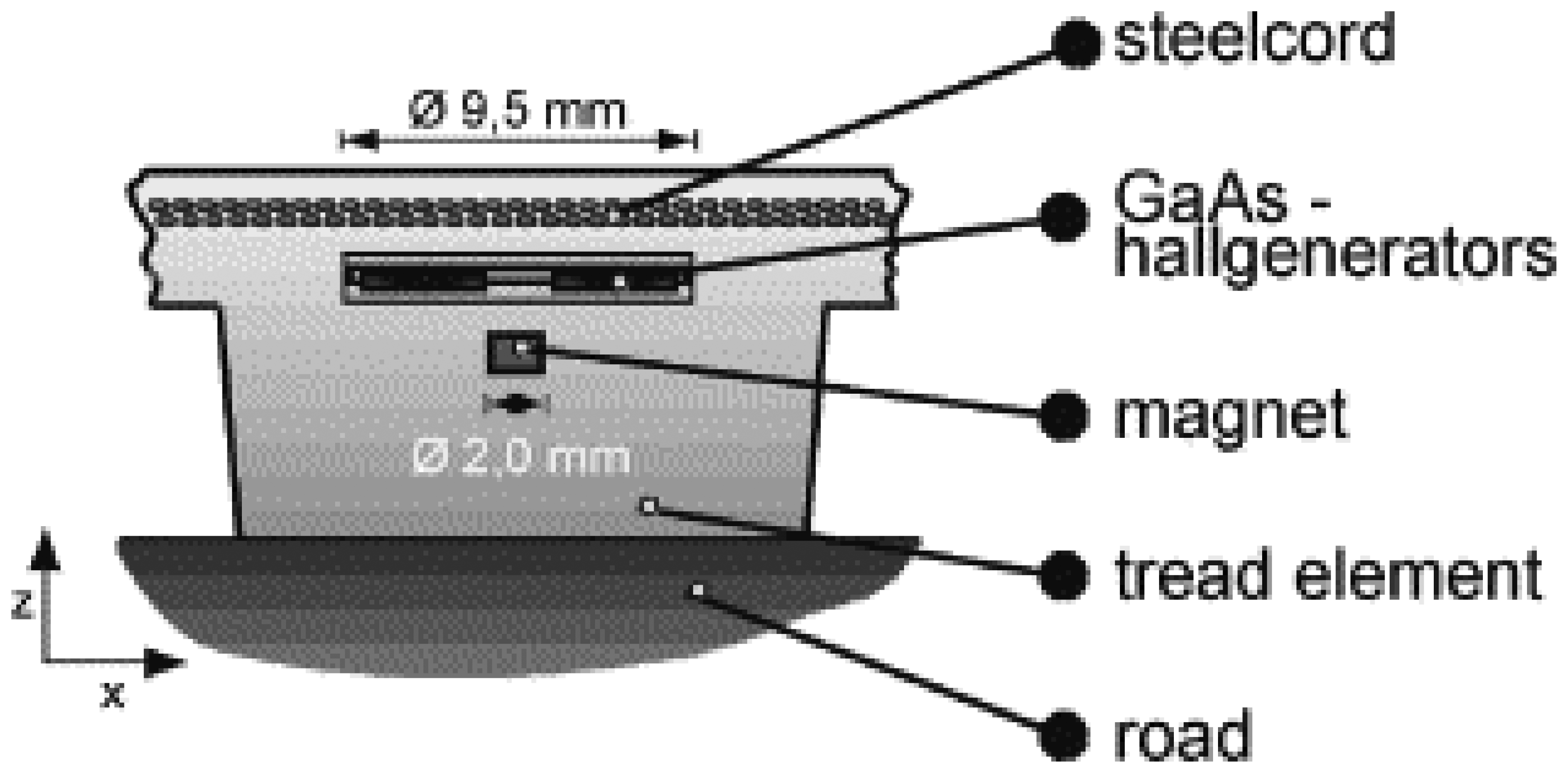
- Brandt, M.; Bachmann, V.; Vogt, A.; Fach, M.; Mayer, K.; Breuer, B.; Hartnagel, H.L. Highly sensitive AlGaAs/GaAs position sensors for measurement of tyre tread deformation. Electron. Lett. 1998, 34, 760–762. [Google Scholar]
- Yilmazoglu, O.; Brandt, M.; Sigmund, J.; Genc, E.; Hartnagel, H.L. Integrated InAs/GaSb 3D magnetic field sensors for “the intelligent tire”. Sens. Actuat. A 2001, 94, 59–63. [Google Scholar]
- Li, L.; Wang, F.-Y.; Zhou, Q. Integrated longitudinal and lateral tire/road friction modeling and monitoring for vehicle motion control. IEEE Trans. Intell. Transp. Syst. 2006, 7, 1–19. [Google Scholar]
- Technical Research Centre of Finland (VTT). Dissemination and use plan (DUP); Deliverable D5, 2002. [Google Scholar]
- Technical Research Centre of Finland (VTT). Needs of various user groups, the interview method and -results; Deliverable 6, 2001. [Google Scholar]
- Technical Research Centre of Finland (VTT). Final report including technical implementation plan (annex); Deliverable 22/23, 2001. [Google Scholar]
- Makinen, T. Intelligent tyre promoting accident-free traffic. Proceedings of IEEE 5th International Conference on Intelligent Transportation Systems, Singapore; 2002; pp. 606–609. [Google Scholar]
- Parwardhan, S.; Tan, H.S.; Tomizuka, M. Experimental results of a tire-burst controller for AHS. Control Eng. Pract. 1997, 5, 1615–1622. [Google Scholar]
- Lee, C.; Hedrick, K.; Yi, K. Real-time slip-based estimation of maximum tire-road friction coefficient. IEEE/ASME Trans. Mechatron. 2004, 9, 454–458. [Google Scholar]
- Mauer, G.F. A fuzzy logic controller for an ABS braking system. IEEE Trans. Fuzzy Syst. 1995, 3, 381–388. [Google Scholar]
- Zhang, X.; Wang, Z.; Li, W.; He, D.; Wang, F. A fuzzy logic controller for an intelligent tires system. Proceedings of IEEE Intelligent Vehicles Symposium; 2005; pp. 875–881. [Google Scholar]
- Gustafsson, F. Slip-based tire-road friction estimation. Automatica 1997, 33, 1087–1099. [Google Scholar]
- Gustafsson, F. Monitoring tire-road friction using the wheel slip. IEEE Contr. Sys. Mag. 1998, 18, 42–49. [Google Scholar]
- Yi, J.; Alvarez, L.; Horowitz, R. Adaptive emergency braking control with underestimation of friction coefficient. IEEE T. Contr. Sys. T. 2002, 10, 381–392. [Google Scholar]
- Miyasaki, N.; Fukumoto, M.; Sogo, Y.; Tsukinoki, H. Antilock brake system (M-Abs) based on the friction coefficient between the wheel and the road surface. SAE Tech. Papers 1990, 9000207. [Google Scholar]
- Miyazaki, N.; Sonoda, H.; Tamaki, H.; Yamaguchi, T.; Ueno, S. A novel antilock braking system (M-Abs) using pure 4 axial directional forces. SAE Tech. Papers 1999, 108, 862–872. [Google Scholar]
- Ohori, M.; Ishizuka, T.; Fujita, T.; Masaki, N.; Suizu, Y. Fundamental study of smart tire system. Proceedings of 2006 IEEE Intelligent Transportation Systems Conference, Toronto, Canada; 2006; pp. 1519–1524. [Google Scholar]
- Kamada, T.; Fukudome, H.; Fujita, T.; Murase, M. Experimental study on ABS control by measuring forces between road surface and tires. Proceedings of AVEC'06, Arnhem, The Netherlands; 2006. AVEC060165. [Google Scholar]
- Umeno, T. Estimation of Tire-Road Friction by Tire Rotational Vibration Model. R&D Rev. Toyota CRDL 2002, 37, 53–58. [Google Scholar]
- Bevly, D.M.; Gerdes, J.C.; Wilson, C.; Zhang, G. The use of GPS based velocity measurements for improved vehicle state estimation. Proceedings of the American Control Conference, Chicago, Illinois, USA; 2000; 4, pp. 2538–2542. [Google Scholar]
- Carlson, C.R.; Gerdes, J.C. Consistent nonlinear estimation of longitudinal tire stiffness and effective radius. IEEE T. Contr. Sys. T. 2005, 13, 1010–1020. [Google Scholar]
- Miller, S.L.; Youngberg, B.; Millie, A.; Schweizer, P.; Gerdes, J.C. Calculating longitudinal wheel slip and tire parameters using GPS velocity. Proceedings of the American control conference, Arlington, VA, USA; 2001; pp. 1800–1805. [Google Scholar]
- Carlson, C.R.; Gerdes, J.C. Nonlinear estimation of longitudinal tire slip under several driving conditions. Proceedings of the 2003 American Control Conference, Denver, Colorado, USA; 2003; 6, pp. 4975–4980. [Google Scholar]
- Hahn, J.-O.; Rajamani, R. GPS-based real-time identification of tire-road friction coefficient. IEEE T. Contr. Sys. T. 2002, 10, 331–343. [Google Scholar]
- Daily, R.; Bevly, D.M. The use of GPS for vehicle stability control systems. IEEE T. Ind. Electron. 2004, 51, 270–277. [Google Scholar]
- Pohl, A.; Ostermayer, G.; Reindl, L.; Seifert, F. Monitoring the tire pressure at cars using passive SAW sensors. Proceedings of IEEE Ultrasonics Symposium, Toronto, Ont., Canada; 1997; 1, pp. 471–174. [Google Scholar]
- Schimetta, G.; Dollinger, F.; Weigel, R. A wireless pressure-measurement system using a SAW hybrid sensor. IEEE T. Microw. Theory 2000, 48, 2730–2735. [Google Scholar]
- Pohl, A.; Seifert, F. Wirelessly interrogable SAW-sensors for vehicular applications. Proceedings of IEEE Instrumentation and Measurement Technology Conference, Brussels, Belgium; 1996; 2, pp. 1465–1468. [Google Scholar]
- Scholl, G.; Korden, C.; Riha, E.; Ruppel, C.C.W.; Wolff, U.; Riha, G.; Reindl, L.; Weigel, R.; Div, S.; Ag, E. SAW-based radio sensor systems for short-range applications. IEEE Microw. Mag. 2003, 4, 68–76. [Google Scholar]
- Pohl, A. A review of wireless SAW sensors. IEEE T. Ultrason. Ferr. 2000, 47, 317–332. [Google Scholar]
- Gruber, S.; Semsch, M.; Strothjohann, T.; Breuer, B. Elements of a mechatronic vehicle corner. Mechatronics 2002, 12, 1069–1080. [Google Scholar]
- Tjiu, W.; Ahanchian, A.; Majlis, B.Y. Development of tire condition monitoring system (TCMS) based on MEMS sensors. Proceedings of IEEE International Conference on Semiconductor Electronics, Kuala Lumpur, Malaysia; 2004; pp. 350–353. [Google Scholar]
- Yi, J.G. A piezo-sensor-based “smart tire” system for mobile robots and vehicles. IEEE-ASME T. Mech. 2008, 13, 95–103. [Google Scholar]
- Savaresi, S.M.; Tanelli, M.; Langthaler, P.; Del Re, L. New regressors for the direct identification of tire deformation in road vehicles via “in-tire” accelerometers. IEEE T. Contr. Sys. T. 2008, 16, 769–780. [Google Scholar]
- Shin, K.H.; Moon, C.R.; Lee, T.H.; Lim, C.H.; Kim, Y.J. Flexible wireless pressure sensor module. Sens. Actuat. A 2005, 123-124, 30–35. [Google Scholar]
- Tung, S.; Witherspoon, S.R.; Roe, L.A.; Silano, A.; Maynard, D.P.; Ferraro, N. A MEMS-based flexible sensor and actuator system for space inflatable structures. Smart Mater. Struct. 2001, 10, 1230–1239. [Google Scholar]
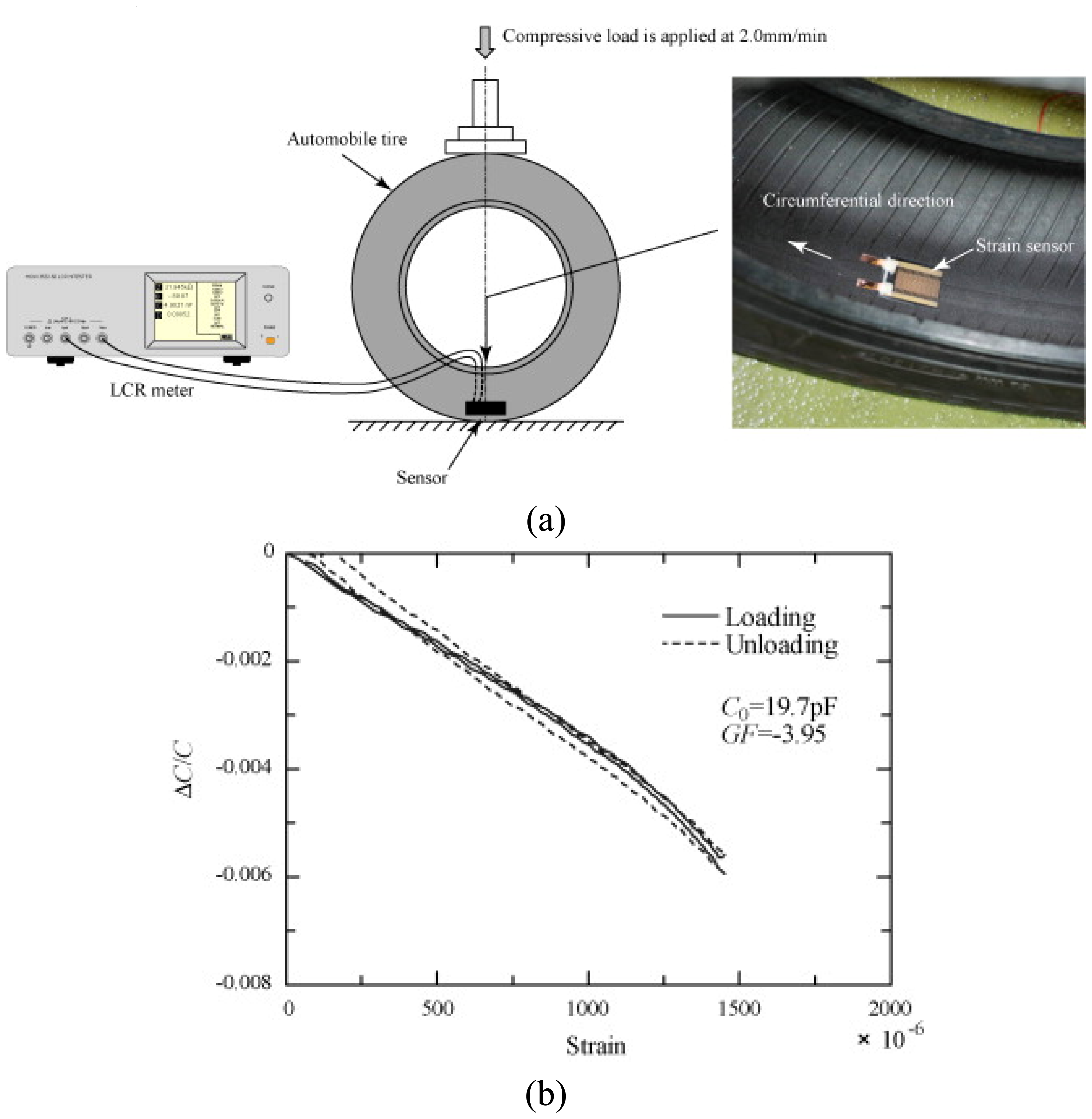
- Matsuzaki, R.; Todoroki, A. Wireless flexible capacitive sensor based on ultra-flexible epoxy resin for strain measurement of automobile tires. Sens. Actuat. A 2007, 140, 32–42. [Google Scholar]
- Matsuzaki, R.; Keating, T.; Todoroki, A.; Hiraoka, N. Rubber-based strain sensor fabricated using photolithography for intelligent tires. Sens. Actuat. A 2008, 148, 1–9. [Google Scholar]
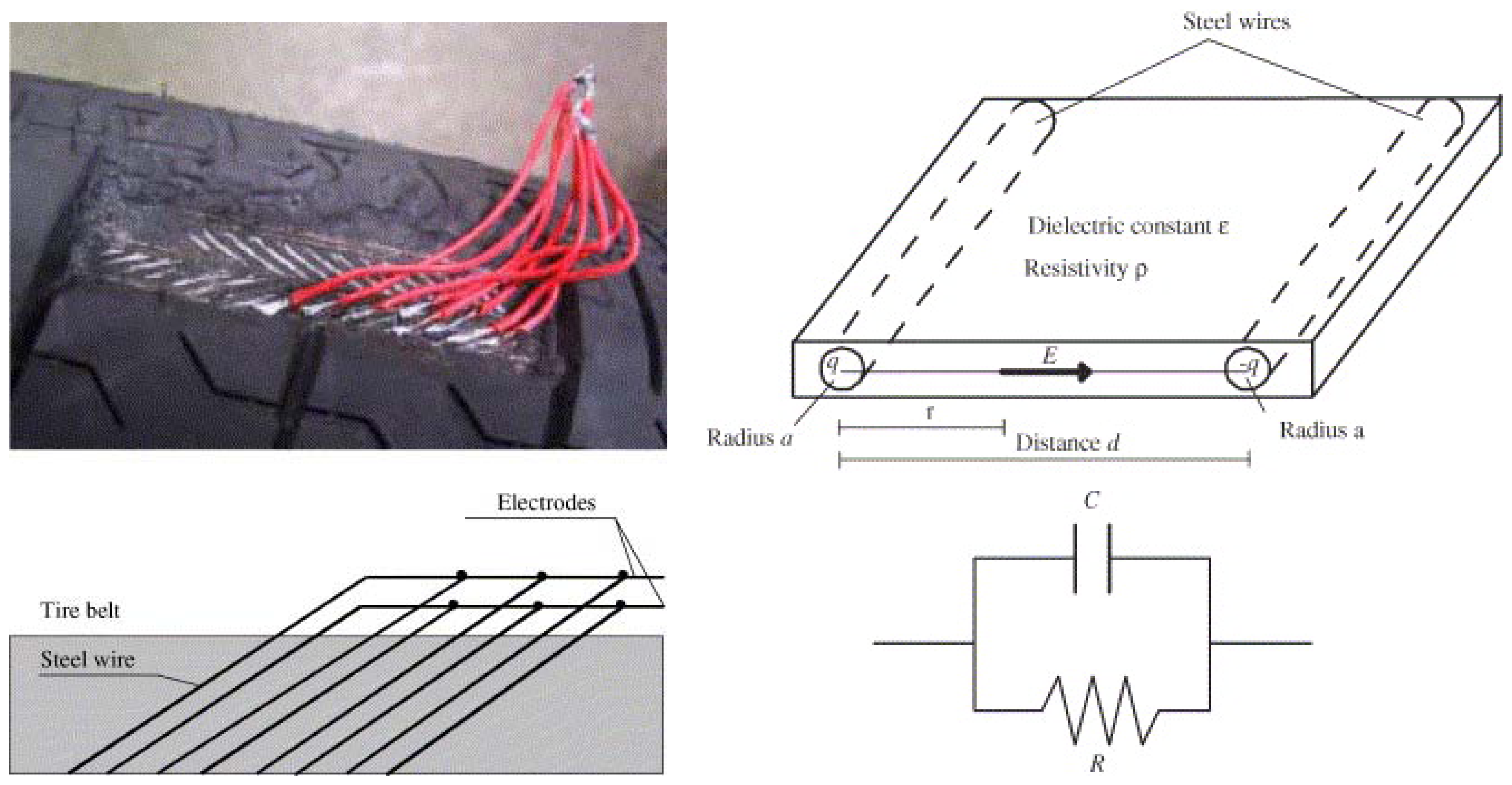
- Matsuzaki, R.; Todoroki, A. Wireless strain monitoring of tires using electrical capacitance changes with an oscillating circuit. Sens. Actuat. A 2005, 119, 323–331. [Google Scholar]
- Matsuzaki, R.; Todoroki, A. Passive wireless strain monitoring of actual tire using capacitance-resistance change and multiple spectral features. Sens. Actuat. A 2005, 126, 277–286. [Google Scholar]
- Matsuzaki, R.; Todoroki, A. Passive wireless strain monitoring of tyres using capacitance and tuning frequency changes. Smart Mater. Struct. 2005, 14, 561–568. [Google Scholar]
- Matsuzaki, R.; Todoroki, A.; Kobayashi, H.; Shimamura, Y. Passive wireless strain monitoring of a tire using capacitance and electromagnetic induction change. Adv. Compos. Mater. 2005, 14, 147–164. [Google Scholar]
- Sergio, M.; Manaresi, N.; Tartagni, M.; Canegallo, R.; Guerrieri, R. On a road tire deformation measurement system using a capacitive-resistive sensor. Smart Mater. Struct. 2006, 15, 1700–1706. [Google Scholar]
- Marsh, D. Safety check - Wireless sensors eye tire pressure. Edn 2004, 49, 31–37. [Google Scholar]
- Kolle, C.; Scherr, W.; Hammerschmidt, D.; Pichler, G.; Motz, M.; Schaffer, B.; Forster, B.; Ausserlechner, U. Ultra low-power monolithically integrated, capacitive pressure sensor for tire pressure monitoring. Sensors 2004, 1, 244–247. [Google Scholar]
- Meninger, S.; Mur-Miranda, J.O.; Amirtharajah, R.; Chandrakasan, A.P.; Lang, J.H. Vibration-to-electric energy conversion. IEEE T. Vlsi. Syst. 2001, 9, 64–76. [Google Scholar]
- Shearwood, C.; Yates, R.B. Development of an electromagnetic micro-generator. Electron. Lett. 1997, 33, 1883–1884. [Google Scholar]
- Pan, C.T.; Wu, T.T. Development of a rotary electromagnetic microgenerator. J. Micromech. Microeng. 2007, 17, 120–128. [Google Scholar]
- Amirtharajah, R.; Chandrakasan, A.P. Self-powered signal processing using vibration-based power generation. IEEE J. Solid-State Circ. 1998, 33, 687–695. [Google Scholar]
- Jeong, S.-J.; Kim, M.-S.; Song, J.-S.; Lee, H.-K. Two-layered piezoelectric bender device for micro-power generator. Sens. Actuat. A 2008, 148, 158–167. [Google Scholar]
- White, N.M.; Glynne-Jones, P.; Beeby, S.P. A novel thick-film piezoelectric micro-generator. Smart Mater. Struct. 2001, 10, 850–852. [Google Scholar]
- Elvin, N.G.; Elvin, A.A.; Spector, M. A self-powered mechanical strain energy sensor. Smart Mater. Struct. 2001, 10, 293–299. [Google Scholar]
- Synder, D.S. Piezoelectric reed power supply for use in abnormal tire condition warning systems. US Patent 4510484, 1985. [Google Scholar]
- Wang, X.D.; Song, J.H.; Liu, J.; Wang, Z.L. Direct-current nanogenerator driven by ultrasonic waves. Science 2007, 316, 102–105. [Google Scholar]
- Wang, X.D.; Liu, J.; Song, J.H.; Wang, Z.L. Integrated nanogenerators in biofluid. Nano Lett. 2007, 7, 2475–2479. [Google Scholar]
- Qin, Y.; Wang, X.D.; Wang, Z.L. Microfibre-nanowire hybrid structure for energy scavenging. Nature 2008, 451, 809–813. [Google Scholar]
- Jachowicz, R.S.; Wojtowicz, G.; Weremczuk, J. A non-contact passive electromagnetic transmitter to any capacitive sensor - design, theory, and model tests. Sens. Actuat. A 2000, 85, 402–408. [Google Scholar]
- Butler, J.C.; Vigliotti, A.J.; Verdi, F.W.; Walsh, S.M. Wireless, passive, resonant-circuit, inductively coupled inductive strain sensor. Sens. Actuat. A 2002, 102, 61–66. [Google Scholar]







© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Matsuzaki, R.; Todoroki, A. Wireless Monitoring of Automobile Tires for Intelligent Tires. Sensors 2008, 8, 8123-8138. https://doi.org/10.3390/s8128123
Matsuzaki R, Todoroki A. Wireless Monitoring of Automobile Tires for Intelligent Tires. Sensors. 2008; 8(12):8123-8138. https://doi.org/10.3390/s8128123
Chicago/Turabian StyleMatsuzaki, Ryosuke, and Akira Todoroki. 2008. "Wireless Monitoring of Automobile Tires for Intelligent Tires" Sensors 8, no. 12: 8123-8138. https://doi.org/10.3390/s8128123
APA StyleMatsuzaki, R., & Todoroki, A. (2008). Wireless Monitoring of Automobile Tires for Intelligent Tires. Sensors, 8(12), 8123-8138. https://doi.org/10.3390/s8128123