Fluid Lubrication and Cooling Effects in Diamond Grinding of Human Iliac Bone


 ,
,
Abstract
:1. Introduction
2. Materials and Methods
3. Results
4. Discussion
- (1)
- Differences due to the perfusion fluid environments
- (2)
- Difference due to the tissue
- (3)
- Difference between manual and milling machines
4.1. Limitations of this Study
4.2. Challenges and Prospects for Future Studies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bürger, T.; Laible, U.; Pritschow, G. Design and Test of a Safe Numerical Control for Robotic Surgery. CIRP Ann. 2001, 50, 295–298. [Google Scholar] [CrossRef]
- Mitsuishi, M.; Warisawa, S.; Tajima, F.; Suzuki, M.; Tanimoto, K.; Kuramoto, K. Development of a 9 Axes Machine Tool for Bone Cutting. CIRP Ann. 2003, 52, 323–328. [Google Scholar] [CrossRef]
- Mitsuishi, M.; Warisawa, S.; Sugita, N. Determination of the Machining Characteristics of a Biomaterial Using a Machine Tool Designed for Total Knee Arthroplasty. CIRP Ann. 2004, 53, 107–112. [Google Scholar] [CrossRef]
- Sun, Y.; Jiang, Z.; Qi, X.; Hu, Y.; Li, B.; Zhang, J. Model-based spinal deformation compensation in robot-assisted decompressive laminectomy. Mechatronics 2019, 59, 115–126. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, L.; Jiang, Z.; Li, B.; Hu, Y.; Tian, W. State recognition of decompressive laminectomy with multiple information in robot-assisted surgery. Artif. Intell. Med. 2020, 102, 101763. [Google Scholar] [CrossRef]
- Jamil, M.; Khan, A.M.; Mia, M.; Iqbal, A.; Gupta, M.K.; Sen, B. Evaluating the effect of micro-lubrication in orthopedic drilling. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2019, 233, 1024–1041. [Google Scholar] [CrossRef]
- Yasutomi, K.; Sakai, K.; Shizuka, H. Effect of tool tilt angle on cutting characteristics in micro-ball end milling. Proc. Manuf. Mach. Tool Conf. 2019, 13, A35. [Google Scholar] [CrossRef]
- Budak, E.; Ozturk, E.; Tunc, L. Modeling and simulation of 5-axis milling processes. CIRP Ann. 2009, 58, 347–350. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Jiang, Z.; Qi, X.; Hu, Y.; Li, B.; Zhang, J. Robot-Assisted Decompressive Laminectomy Planning Based on 3D Medical Image. IEEE Access 2018, 6, 22557–22569. [Google Scholar] [CrossRef]
- Osa, T.; Abawi, C.F.; Sugita, N.; Chikuda, H.; Sugita, S.; Tanaka, T.; Oshima, H.; Moro, T.; Tanaka, S.; Mitsuishi, M. Hand-Held Bone Cutting Tool with Autonomous Penetration Detection for Spinal Surgery. IEEE/ASME Trans. Mechatron. 2015, 20, 3018–3027. [Google Scholar] [CrossRef]
- Ponnusamy, K.; Chewning, S.; Mohr, C. Robotic Approaches to the Posterior Spine. Spine 2009, 34, 2104–2109. [Google Scholar] [CrossRef] [PubMed]
- Itoh, S.; Ito, Y.; Shikita, T. Basic Study on Bone Cutting Forces for Developing Surgical Instruments. Bull. JSME 1983, 26, 2295–2301. [Google Scholar] [CrossRef] [Green Version]
- Carter, D.R.; Hayes, W.C. Compact bone fatigue damage--I. Residual strength and stiffness. J. Biomech. 1977, 10, 325–337. [Google Scholar] [CrossRef]
- Vashishth, D.; Behiri, J.; Bonfield, W. Crack growth resistance in cortical bone: Concept of microcrack toughening. J. Biomech. 1997, 30, 763–769. [Google Scholar] [CrossRef]
- Wenzel, T.; Schaffler, M.; Fyhrie, D. In vivo trabecular microcracks in human vertebral bone. Bone 1996, 19, 89–95. [Google Scholar] [CrossRef]
- Schaffler, M.; Choi, K.; Milgrom, C. Aging and matrix microdamage accumulation in human compact bone. Bone 1995, 17, 521–525. [Google Scholar] [CrossRef]
- Yeni, Y.N.; Fyhrie, D.P. Fatigue damage-fracture mechanics interaction in cortical bone. Bone 2002, 30, 509–514. [Google Scholar] [CrossRef]
- Zysset, P.K.; Guo, X.E.; Hoffler, C.E.; E Moore, K.; A Goldstein, S. Elastic modulus and hardness of cortical and trabecular bone lamellae measured by nanoindentation in the human femur. J. Biomech. 1999, 32, 1005–1012. [Google Scholar] [CrossRef]
- Gu, P.; Li, L. Fabrication of Biomedical Prototypes with Locally Controlled Properties Using FDM. CIRP Ann. 2002, 51, 181–184. [Google Scholar] [CrossRef]
- Li, Q.; Du, Z.; Yu, H. Trajectory planning for robot-assisted laminectomy decompression based on CT images. IOP Conf. Ser. Mater. Sci. Eng. 2020, 768, 042037. [Google Scholar] [CrossRef]
- Monafo, W.W.; Eliasson, S.G. Sciatic nerve function following hindlimb thermal injury. J. Surg. Res. 1987, 43, 344–350. [Google Scholar] [CrossRef]
- Dupuy, D.E.; Hong, R.; Oliver, B.; Goldberg, S.N. Radiofrequency ablation of spinal tumors: Temperature distribution in the spinal canal. AJR Am. J. Roentgenol. 2000, 175, 1263–1266. [Google Scholar] [CrossRef] [PubMed]
- Letcher, F.S.; Goldring, S. The Effect of Radiofrequency Current and Heat on Peripheral Nerve Action Potential in the Cat. J. Neurosurg. 1968, 29, 42–47. [Google Scholar] [CrossRef] [Green Version]
- Abbott, Z.; Smuck, M.; Haig, A.; Sagher, O. Irreversible Spinal Nerve Injury from Dorsal Ramus Radiofrequency Neurotomy: A Case Report. Arch. Phys. Med. Rehabil. 2007, 88, 1350–1352. [Google Scholar] [CrossRef] [PubMed]
- Hosono, N.; Miwa, T.; Mukai, Y.; Takenaka, S.; Makino, T.; Fuji, T. Potential risk of thermal damage to cervical nerve roots by a high-speed drill. J. Bone Jt. Surgery. Br. Vol. 2009, 91, 1541–1544. [Google Scholar] [CrossRef] [PubMed]
- Tamai, K.; Suzuki, A.; Takahashi, S.; Akhgar, J.; Rahmani, M.S.; Hayashi, K.; Ohyama, S.; Nakamura, H. The incidence of nerve root injury by high-speed drill can be reduced by chilled saline irrigation in a rabbit model. Bone Jt. J. 2017, 99, 554–560. [Google Scholar] [CrossRef]
- Takenaka, S.; Hosono, N.; Mukai, Y.; Tateishi, K.; Fuji, T.; Surgeon, O. Significant reduction in the incidence of C5 palsy after cervical laminoplasty using chilled irrigation water. Bone Jt. J. 2016, 98, 117–124. [Google Scholar] [CrossRef] [PubMed]
- Xu, D.; Pollock, M. Experimental nerve thermal injury. Brain 1994, 117, 375–384. [Google Scholar] [CrossRef]
- Hasan, S.; Härtl, R.; Hofstetter, C.P. The benefit zone of full-endoscopic spine surgery. J. Spine Surg. 2019, 5, S41–S56. [Google Scholar] [CrossRef]
- Sasaki, M.; Morris, S.; Goto, T.; Iwatsuki, K.; Yoshimine, T. Spray-irrigation system attached to high-speed drills for simultaneous prevention of local heating and preservation of a clear operative field in spinal surgery. Neurol. Med. Chir. 2010, 50, 900–904. [Google Scholar] [CrossRef] [Green Version]
- Ozturk, E.; Tunc, L.T.; Budak, E. Investigation of lead and tilt angle effects in 5-axis ball-end milling processes. Int. J. Mach. Tools Manuf. 2009, 49, 1053–1062. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.-D.; Chen, Q.; Ning, S.-H.; Ding, W.-Y.; Yang, D.-L. Modified eggshell procedure via posterior approach for sclerosing thoracic disc herniation: A preliminary study. J. Orthop. Surg. Res. 2016, 11, 102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Korez, R.; Ibragimov, B.; Likar, B.; Pernuš, F.; Vrtovec, T. A Framework for Automated Spine and Vertebrae Interpolation-Based Detection and Model-Based Segmentation. IEEE Trans. Med. Imaging 2015, 34, 1649–1662. [Google Scholar] [CrossRef] [PubMed]
- Yao, J.; Burns, J.E.; Forsberg, D.; Seitel, A.; Rasoulian, A.; Abolmaesumi, P.; Hammernik, K.; Urschler, M.; Ibragimov, B.; Korez, R.; et al. A multi-center milestone study of clinical vertebral CT segmentation. Comput. Med. Imaging Graph. 2016, 49, 16–28. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, D.; Xiong, T.; Xu, D.; Huang, Q.; Liu, D.; Zhou, S.K.; Xu, Z.; Park, J.; Chen, M.; Tran, T.D.; et al. Automatic Vertebra Labeling in Large-Scale 3D CT Using Deep Image-to-Image Network with Message Passing and Sparsity Regularization. Lect. Notes Comput. Sci. 2017, 633–644. [Google Scholar] [CrossRef] [Green Version]
- Ibragimov, B.; Korez, R.; Likar, B.; Pernuš, F.; Xing, L.; Vrtovec, T. Segmentation of Pathological Structures by Landmark-Assisted Deformable Models. IEEE Trans. Med. Imaging 2017, 36, 1457–1469. [Google Scholar] [CrossRef] [PubMed]
- Lessmann, N.; Van Ginneken, B.; De Jong, P.A.; Išgum, I. Iterative fully convolutional neural networks for automatic vertebra segmentation and identification. Med. Image Anal. 2019, 53, 142–155. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Squires, A.; Seifabadi, R.; Xu, S.; Agarwal, H.K.; Bernardo, M.; Pinto, P.A.; Choyke, P.; Wood, B.; Tse, Z.T. Robotic System for MRI-Guided Focal Laser Ablation in the Prostate. IEEE ASME Trans. Mechatron. 2017, 22, 107–114. [Google Scholar] [CrossRef]
- Galetta, M.S.; Leider, J.D.; Divi, S.N.; Goyal, D.K.; Schroeder, G.D. Robotics in spinal surgery. Ann. Transl. Med. 2019, 7, S165. [Google Scholar] [CrossRef]
- Tian, W.; Fan, M.; Zeng, C.; Liu, Y.; He, D.; Zhang, Q. Telerobotic Spinal Surgery Based on 5G Network: The First 12 Cases. Neurospine 2020, 17, 114–120. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
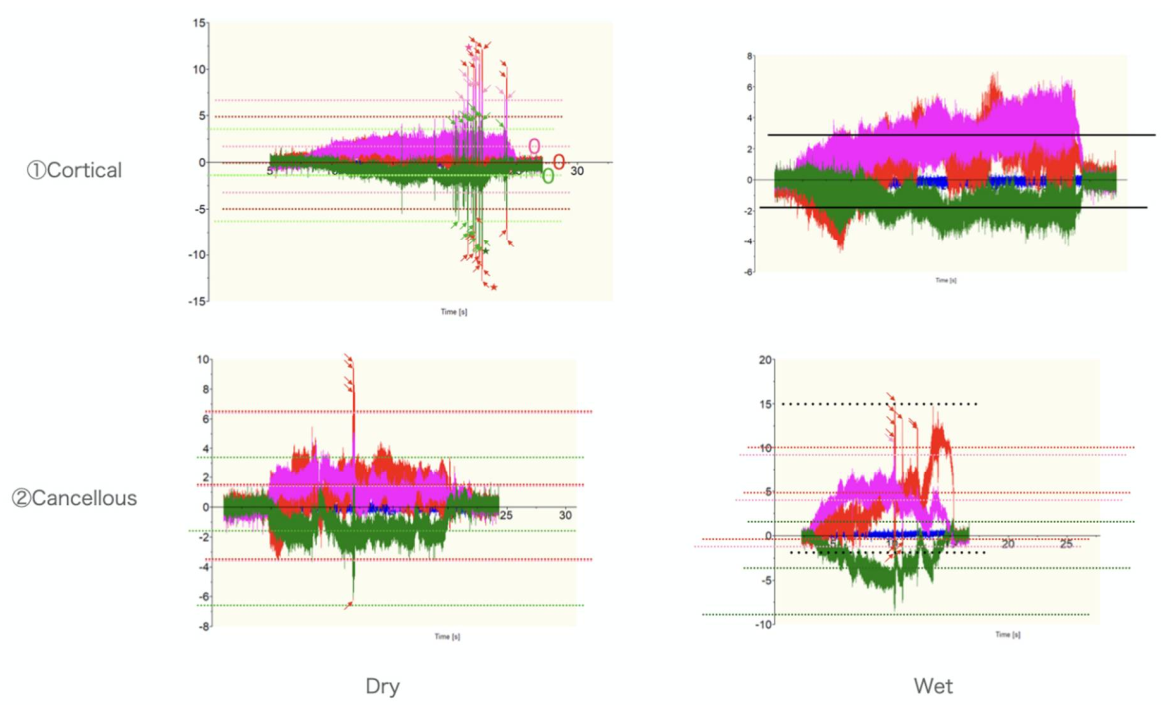
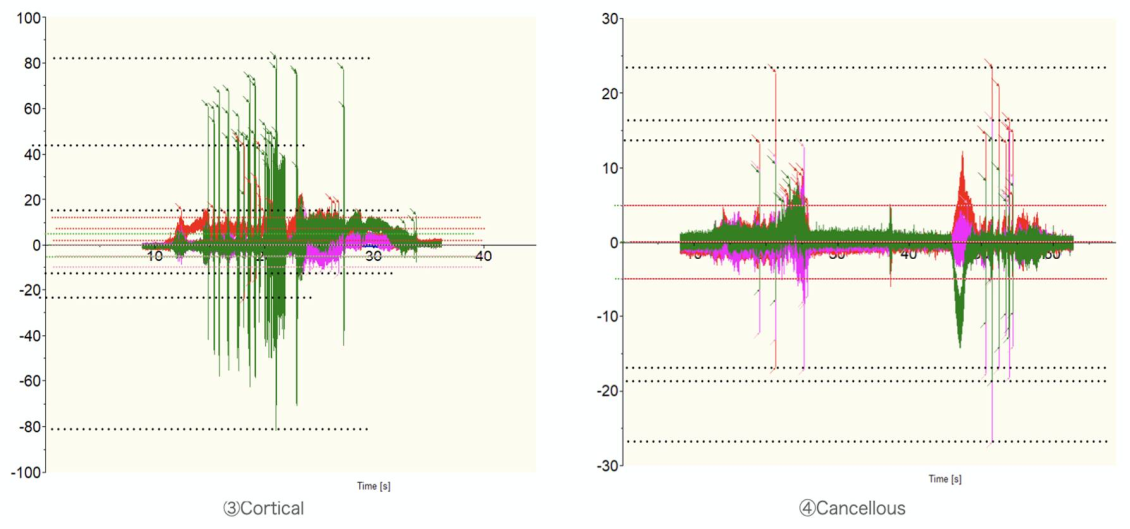
| Series | Tissue | Atmosphere | Feed | Direction | Grinding Force (Base ± Amplitude, N) | Spike (Frequency & Force, N) | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| x | y | z | x | y | z | |||||
| 1d | Cortical | Dry | Manual | y(−) | −1.5 ±1.5 | −2.0 ±2.0 | 0 ±1.0 | 23 −10~5 | 10 −1~11 | 21 −12~13 |
| 1w | Cortical | Wet | Manual | y(−) | −2.0 ±2.0 | −3.0 ±3.0 | −3.0 ±4.0 | 0 | 0 | 0 |
| 2d | Cancellous | Dry | Manual | y(−) | −1.5 ±1.0 | 1.5 ±1.5 | 1.5 ±2.5 | 0 | 0 | 5 −6~10 |
| 2w | Cancellous | Wet | Manual | y(−) | −3.5 ±2.0 | 4.0 ±1.5 | 5.0 ±2.5 | 0 | 1 11 | 11 −2~15 |
| 3 | Cortical | Wet | Machine | x(−) | 0 ±5.0 | −5.0 ±5.0 | −8.0 ±3.0 | 92 −80~80 | 10 −12~15 | 19 −23~43 |
| 4 | Cancellous Cortical | Wet | Machine | x(−)y(5)x(+) | 0 ±3.0 | 0 ±3.0 | 0 ±3.0 | 21 −18~13 | 25 −27~17 | 21 −17~24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kitahama, Y.; Shizuka, H.; Kimura, R.; Suzuki, T.; Ohara, Y.; Miyake, H.; Sakai, K. Fluid Lubrication and Cooling Effects in Diamond Grinding of Human Iliac Bone. Medicina 2021, 57, 71. https://doi.org/10.3390/medicina57010071
Kitahama Y, Shizuka H, Kimura R, Suzuki T, Ohara Y, Miyake H, Sakai K. Fluid Lubrication and Cooling Effects in Diamond Grinding of Human Iliac Bone. Medicina. 2021; 57(1):71. https://doi.org/10.3390/medicina57010071
Chicago/Turabian StyleKitahama, Yoshihiro, Hiroo Shizuka, Ritsu Kimura, Tomo Suzuki, Yukoh Ohara, Hideaki Miyake, and Katsuhiko Sakai. 2021. "Fluid Lubrication and Cooling Effects in Diamond Grinding of Human Iliac Bone" Medicina 57, no. 1: 71. https://doi.org/10.3390/medicina57010071
APA StyleKitahama, Y., Shizuka, H., Kimura, R., Suzuki, T., Ohara, Y., Miyake, H., & Sakai, K. (2021). Fluid Lubrication and Cooling Effects in Diamond Grinding of Human Iliac Bone. Medicina, 57(1), 71. https://doi.org/10.3390/medicina57010071