Sustainable Agriculture by Increasing Nitrogen Fertilizer Efficiency Using Low-Resolution Camera Mounted on Unmanned Aerial Vehicles

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Plots
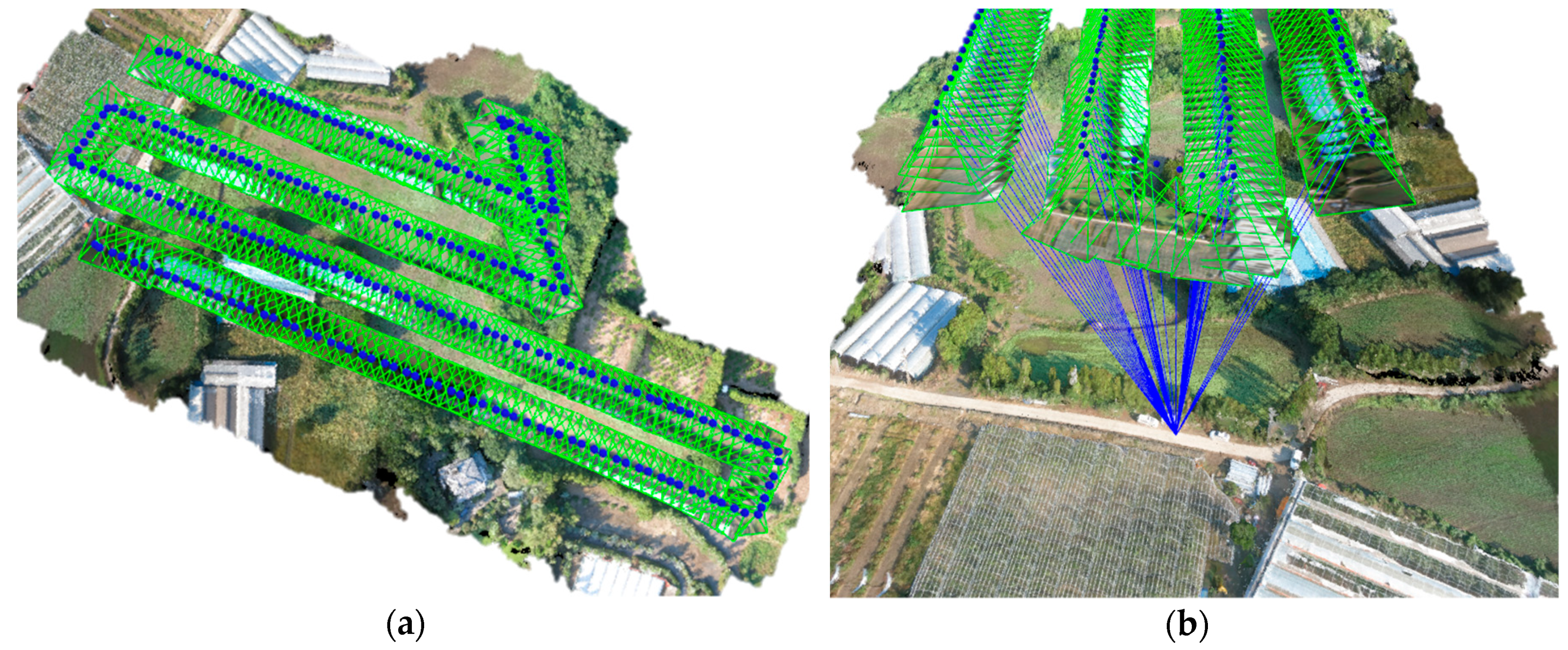
2.2. Unmanned aerial vehicles (UAVs) Flight and Image Acquisition
2.3. Image Processing
2.4. Near Infrared (NIR) Vegetation Index
2.5. Plant Sampling and Chlorophyll Analysis
2.6. Statistical Analysis
3. Results
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Raun, W.R.; Johnson, G.V. Improving Nitrogen Use Efficiency for Cereal Production. Agron. J. 1999, 91, 357. [Google Scholar] [CrossRef]
- Solari, F.; Shanahan, J.; Ferguson, R.; Schepers, J.; Gitelson, A. Active Sensor Reflectance Measurements of Corn Nitrogen Status and Yield Potential. Agron. J. 2008, 100, 571. [Google Scholar] [CrossRef]
- Lee, S.-D.; Kwon, S.-S. Carbon Sequestration in the Urban Areas of Seoul with Climate Change: Implication for Open Innovation in Environmental Industry. J. Open Innov. Technol. Mark. Complex. 2018, 4, 48. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Wilson, M.; Kamruzzaman, M. Disruptive Impacts of Automated Driving Systems on the Built Environment and Land Use: An Urban Planner’s Perspective. J. Open Innov. Technol. Mark. Complex. 2019, 5, 24. [Google Scholar] [CrossRef]
- Davis, G.H.; Lee, C.K.; Bradley, E.; Payne, B. Geohydrologic interpretations of a volcanic island from environmental isotopes. Water Resour. Res. 1970, 6, 99–109. [Google Scholar] [CrossRef]
- Hahn, J.; Lee, Y.; Kim, N.; Hahn, C.; Lee, S. The groundwater resources and sustainable yield of Cheju volcanic island, Korea. Environ. Earth Sci. 1997, 33, 43–53. [Google Scholar] [CrossRef]
- Won, J.-H.; Kim, J.-W.; Koh, G.-W.; Lee, J.-Y. Evaluation of hydrogeological characteristics in Jeju Island, Korea. Geosci. J. 2005, 9, 33–46. [Google Scholar] [CrossRef]
- Lee, K.-S.; Kim, J.-M.; Lee, D.-R.; Kim, Y.; Lee, D. Analysis of water movement through an unsaturated soil zone in Jeju Island, Korea using stable oxygen and hydrogen isotopes. J. Hydrol. 2007, 345, 199–211. [Google Scholar] [CrossRef]
- Lee, S.-D. Wintering Habitat Use Pattern of Red-Crowned Cranes in the Korean Demilitarized Zone. J. Open Innov. Technol. Mark. Complex. 2018, 4, 58. [Google Scholar] [CrossRef]
- Han, S.; Hendrickson, L.; Ni, B. In Comparison of satellite remote sensing and aerial photography for ability to detect in-season nitrogen stress in corn. In Proceedings of the 2001 ASAE Annual Meeting, Sacramento, CA, USA, 30 July–1 August 2001; American Society of Agricultural and Biological Engineers: St. Joseph, MA, USA, 2001; p. 1. [Google Scholar]
- Schepers, J.S.; Francis, D.D.; Vigil, M.; Below, F.E. Comparison of corn leaf nitrogen concentration and chlorophyll meter readings. Commun. Soil Sci. Plant Anal. 1992, 23, 2173–2187. [Google Scholar] [CrossRef]
- Kim, D.-W.; Yun, H.S.; Jeong, S.-J.; Kwon, Y.-S.; Kim, S.-G.; Lee, W.S.; Kim, H.-J. Modeling and Testing of Growth Status for Chinese Cabbage and White Radish with UAV-Based RGB Imagery. Remote Sens. 2018, 10, 563. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.; Schell, J.; Deering, D. Monitoring vegetation systems in the great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309–317. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Chappelle, E.W.; Kim, M.S.; McMurtrey, J.E., III. Ratio analysis of reflectance spectra (RARS): An algorithm for the remote estimation of the concentrations of chlorophyll a, chlorophyll b, and carotenoids in soybean leaves. Remote Sens. Environ. 1992, 39, 239–247. [Google Scholar] [CrossRef]
- Montgomery, D.C.; Peck, E.A.; Vining, G.G. Introduction to Linear Regression Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 821. [Google Scholar]
- Salamí, E.; Barrado, C.; Pastor, E. UAV Flight Experiments Applied to the Remote Sensing of Vegetated Areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Rasmussen, J.; Ntakos, G.; Nielsen, J.; Svensgaard, J.; Poulsen, R.N.; Christensen, S. Are vegetation indices derived from consumer-grade cameras mounted on UAVs sufficiently reliable for assessing experimental plots? Eur. J. Agron. 2016, 74, 75–92. [Google Scholar] [CrossRef]
- Huete, A.; Huete, A. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Duigan, S.P.; Richardson, A.D.; Berlyn, G.P. An evaluation of noninvasive methods to estimate foliar chlorophyll content. New Phytol. 2002, 153, 185–194. [Google Scholar] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Date | Flight Speed (m·s−1) | Flight Altitude (m) | The Number of Images | Ground Sample Distance (GSD) (cm·Pixel−1) | Flight Time | Illumination | Wind (m·s−1) |
|---|---|---|---|---|---|---|---|
| 13 October 2018 | 2 | 80 | 2135 | 8.12 | 4–5 pm | Clear | 1.5 |
| Source of Variation | df | Sum of Square | Mean Square | F Statistics | p Value |
|---|---|---|---|---|---|
| Regression | 1 | 24.6246 | 24.6246 | 80.631 | <0.0001 |
| Residuals | 9 | 2.7486 | 0.3054 |
| Source of Variation | df | Sum of Square | Mean Square | F Statistics | p Value |
|---|---|---|---|---|---|
| Lack of Fit | 9 | 5.4972 | 0.6108 | 0.1808 | 0.992 |
| Error Pure | 11 | 37.168 | 3.3789 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-W.; Min, T.-S.; Kim, Y.; Silva, R.R.; Hyun, H.-N.; Kim, J.-S.; Kim, K.-H.; Kim, H.-J.; Chung, Y.S. Sustainable Agriculture by Increasing Nitrogen Fertilizer Efficiency Using Low-Resolution Camera Mounted on Unmanned Aerial Vehicles. Int. J. Environ. Res. Public Health 2019, 16, 3893. https://doi.org/10.3390/ijerph16203893
Kim D-W, Min T-S, Kim Y, Silva RR, Hyun H-N, Kim J-S, Kim K-H, Kim H-J, Chung YS. Sustainable Agriculture by Increasing Nitrogen Fertilizer Efficiency Using Low-Resolution Camera Mounted on Unmanned Aerial Vehicles. International Journal of Environmental Research and Public Health. 2019; 16(20):3893. https://doi.org/10.3390/ijerph16203893
Chicago/Turabian StyleKim, Dong-Wook, Tae-Sun Min, Yoonha Kim, Renato Rodrigues Silva, Hae-Nam Hyun, Ju-Sung Kim, Kyung-Hwan Kim, Hak-Jin Kim, and Yong Suk Chung. 2019. "Sustainable Agriculture by Increasing Nitrogen Fertilizer Efficiency Using Low-Resolution Camera Mounted on Unmanned Aerial Vehicles" International Journal of Environmental Research and Public Health 16, no. 20: 3893. https://doi.org/10.3390/ijerph16203893
APA StyleKim, D. -W., Min, T. -S., Kim, Y., Silva, R. R., Hyun, H. -N., Kim, J. -S., Kim, K. -H., Kim, H. -J., & Chung, Y. S. (2019). Sustainable Agriculture by Increasing Nitrogen Fertilizer Efficiency Using Low-Resolution Camera Mounted on Unmanned Aerial Vehicles. International Journal of Environmental Research and Public Health, 16(20), 3893. https://doi.org/10.3390/ijerph16203893