
Hydrodynamic Characteristics of Different Undulatory Underwater Swimming Positions Based on Multi-Body Motion Numerical Simulation Method


Abstract
:1. Introduction
2. Numerical Method
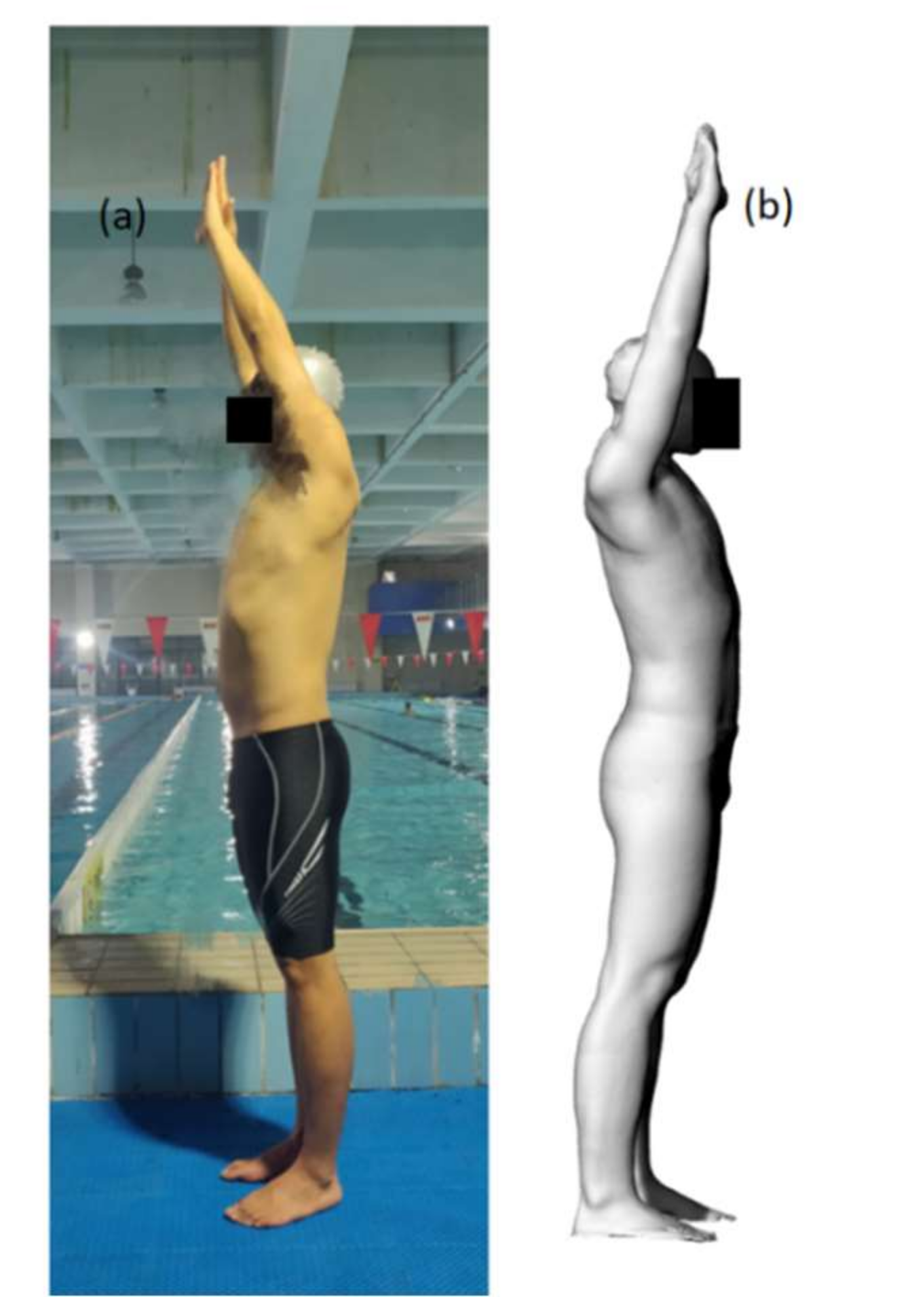
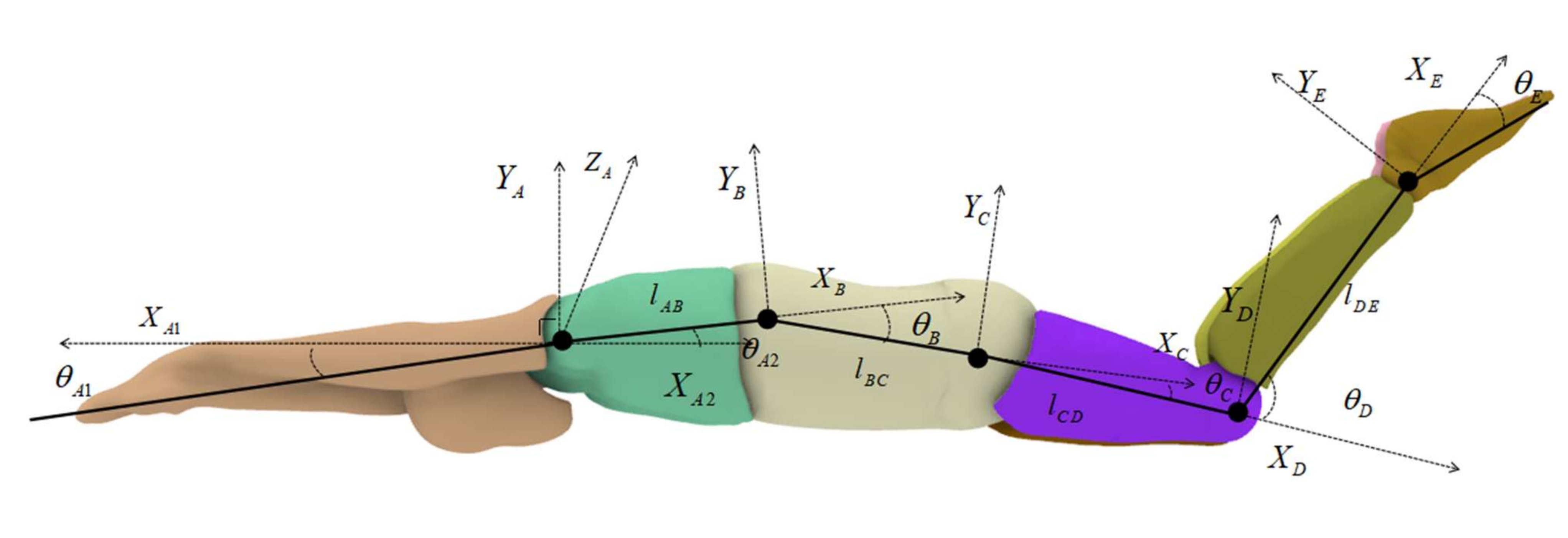
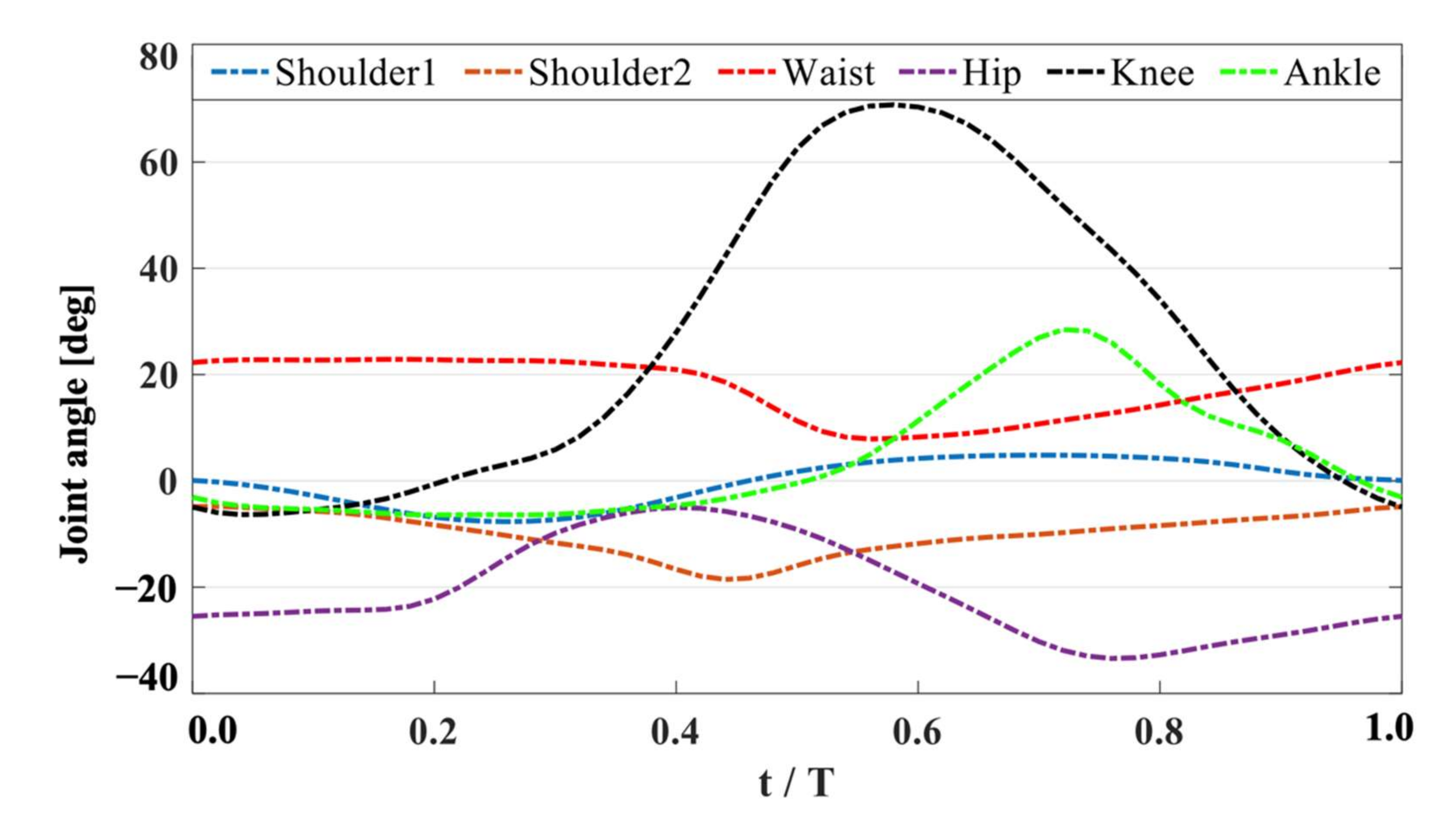
2.1. Swimmer Geometry and Motion Capture
2.2. Governing Equations
2.3. Computational Domain
2.4. Numerical Implementation
2.5. Statistical Analysis
3. Results and Discussion
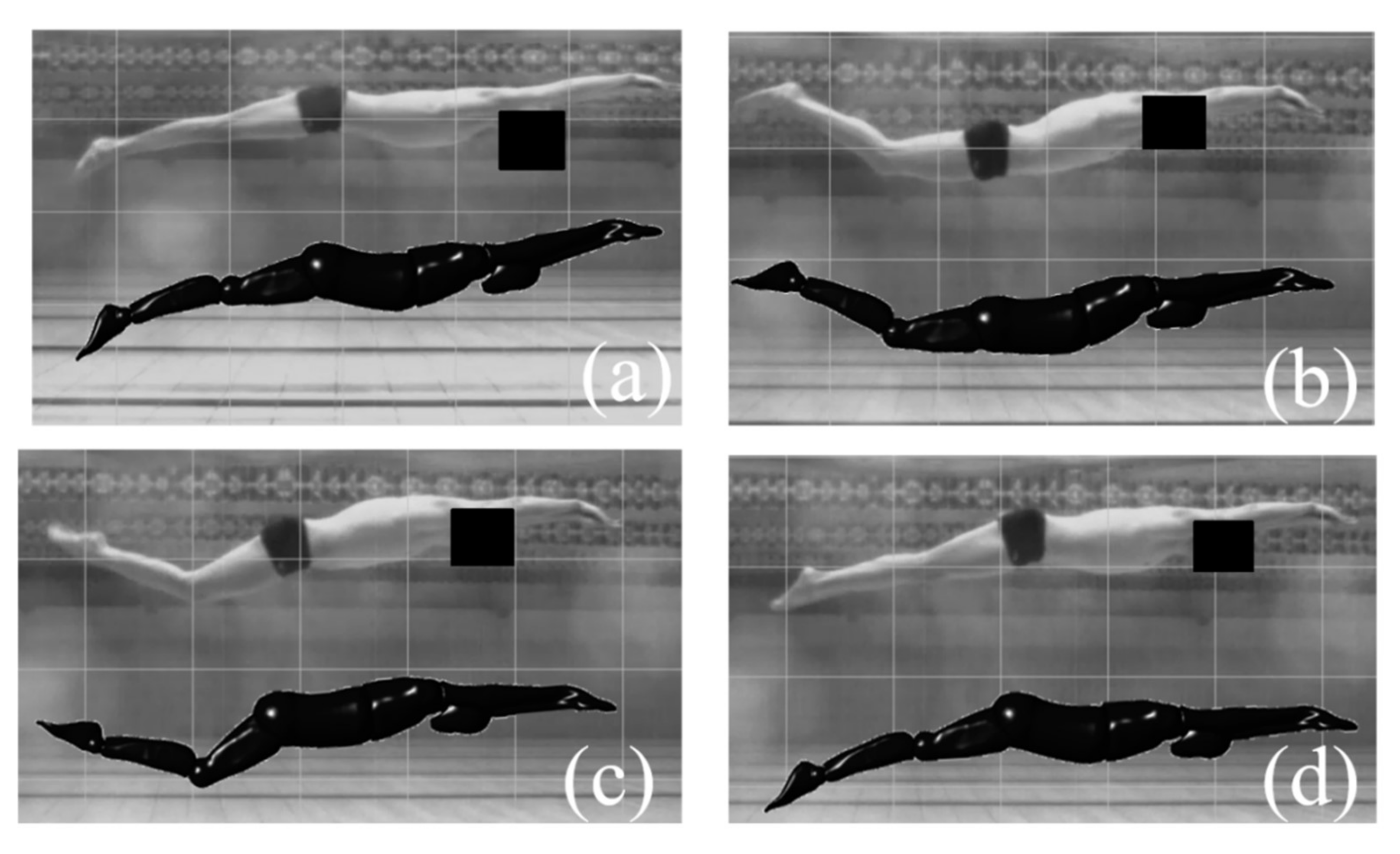
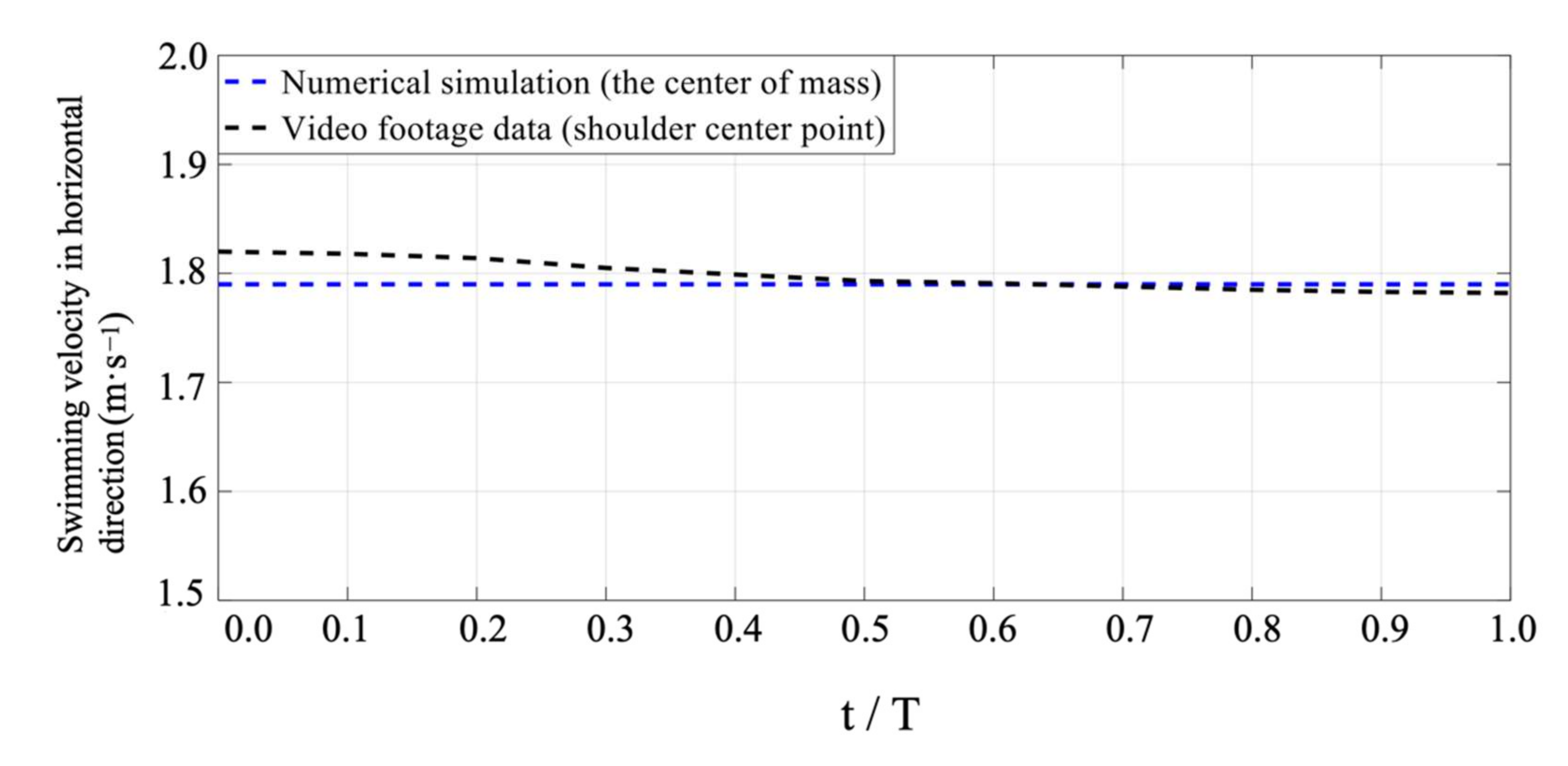
3.1. Validation of the Velocity
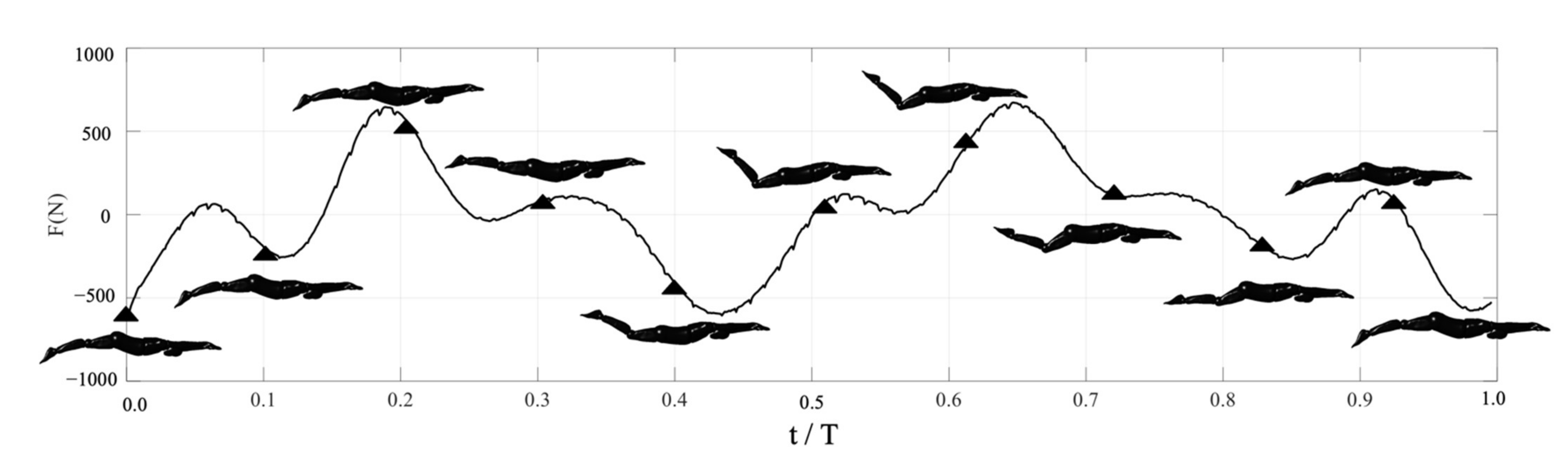
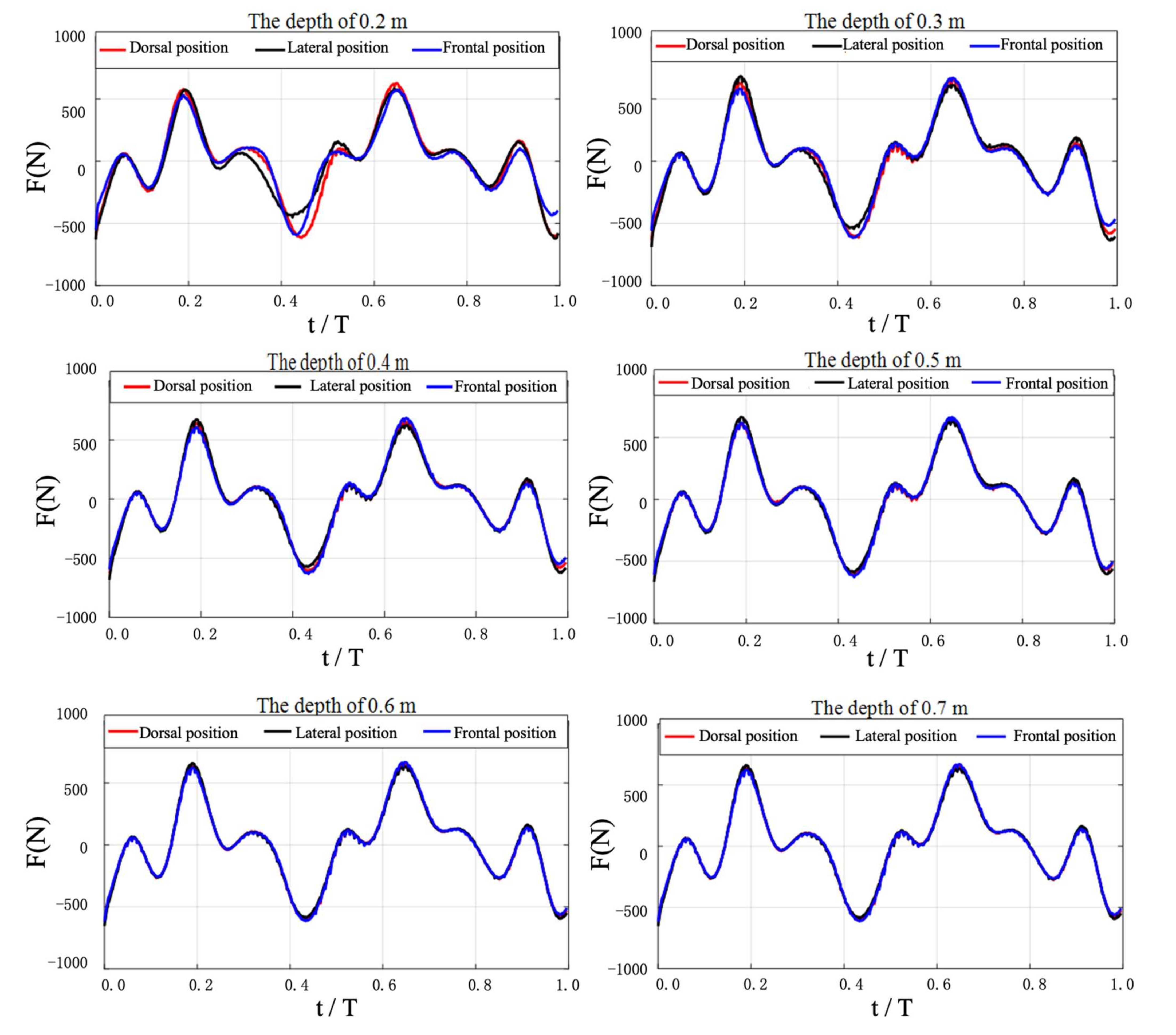
3.2. Net Streamwise Forces
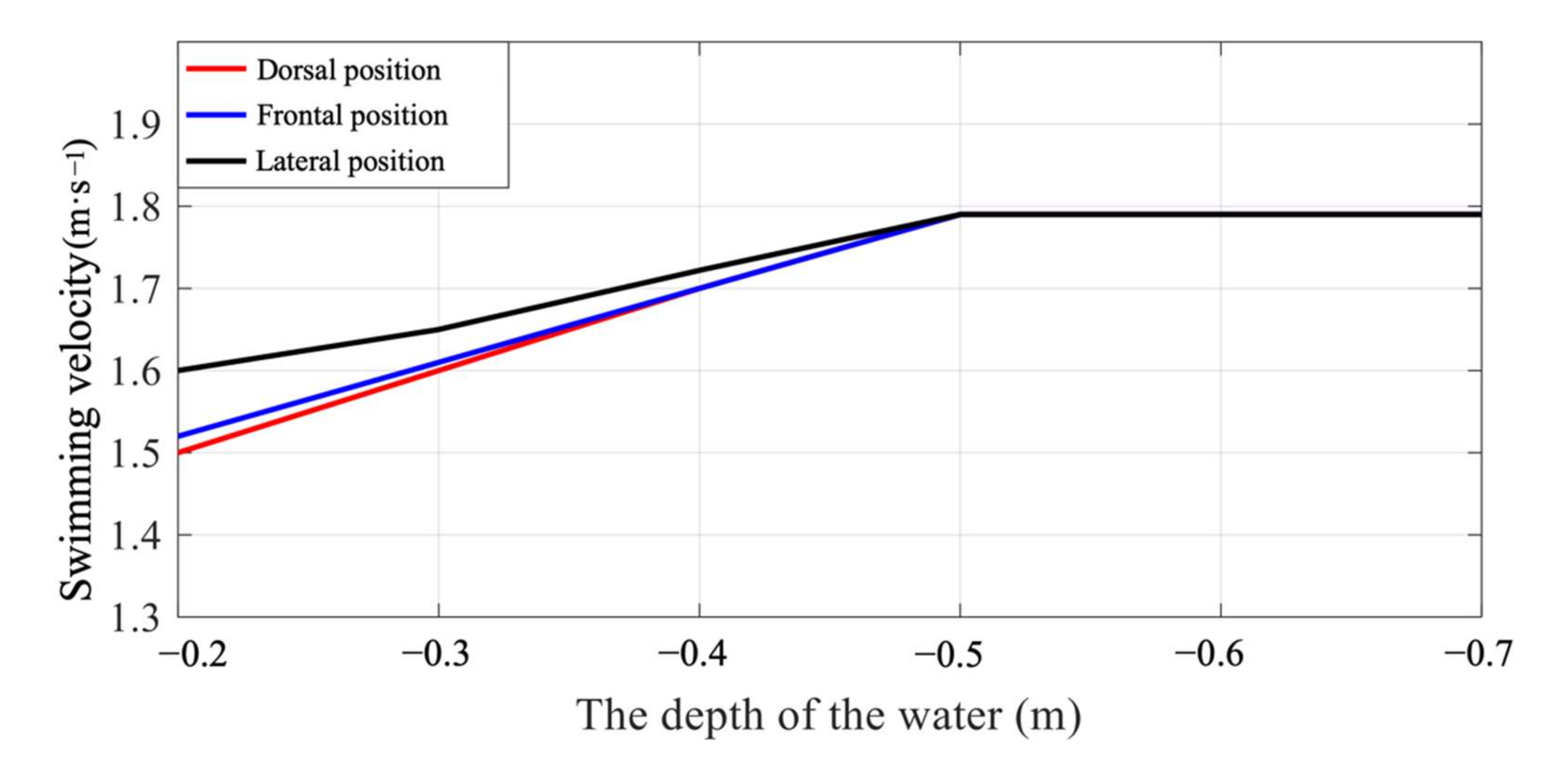
3.3. The Swimming Velocity
3.4. Visualization Analysis
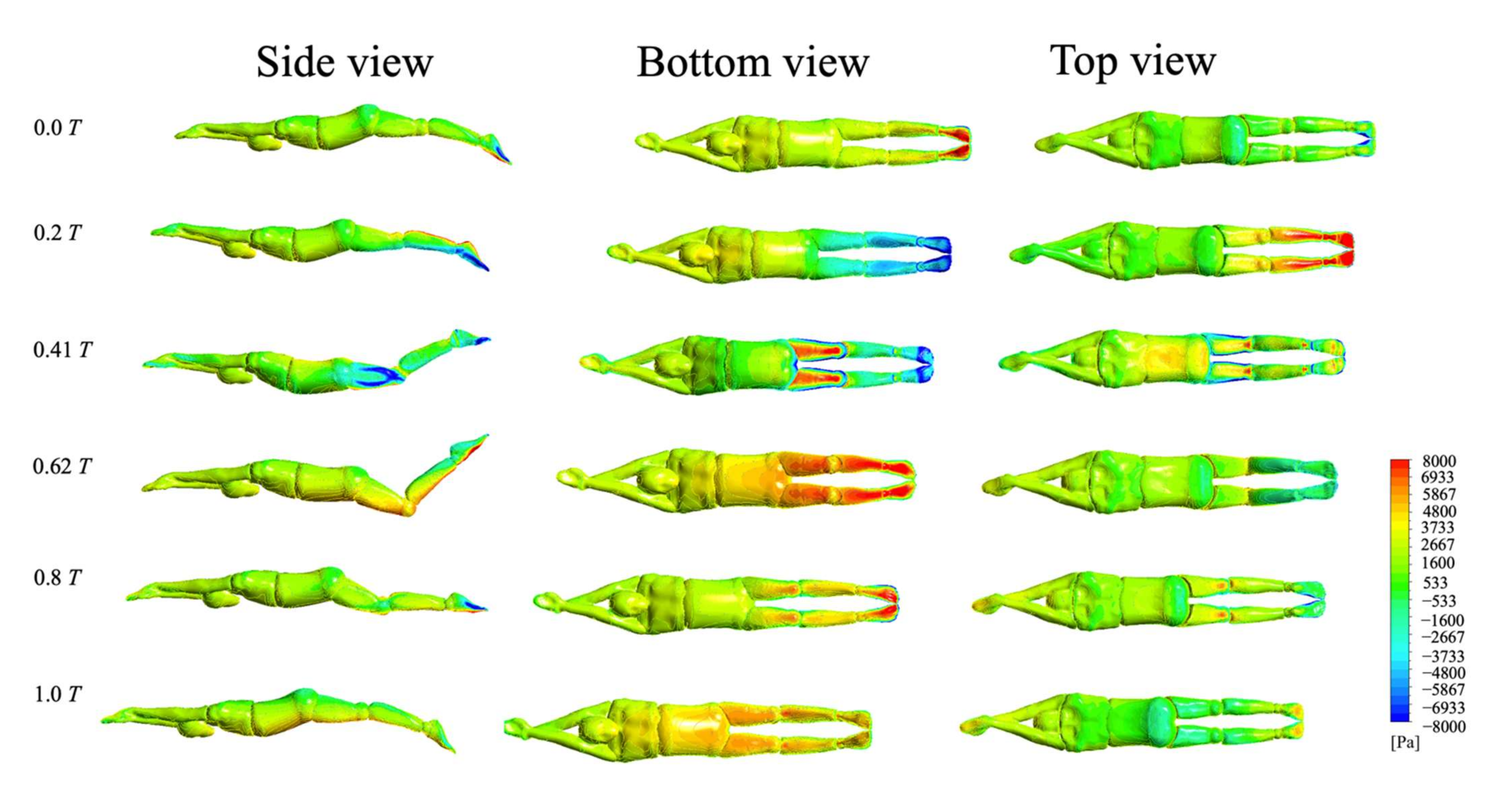
3.4.1. Surface Pressure
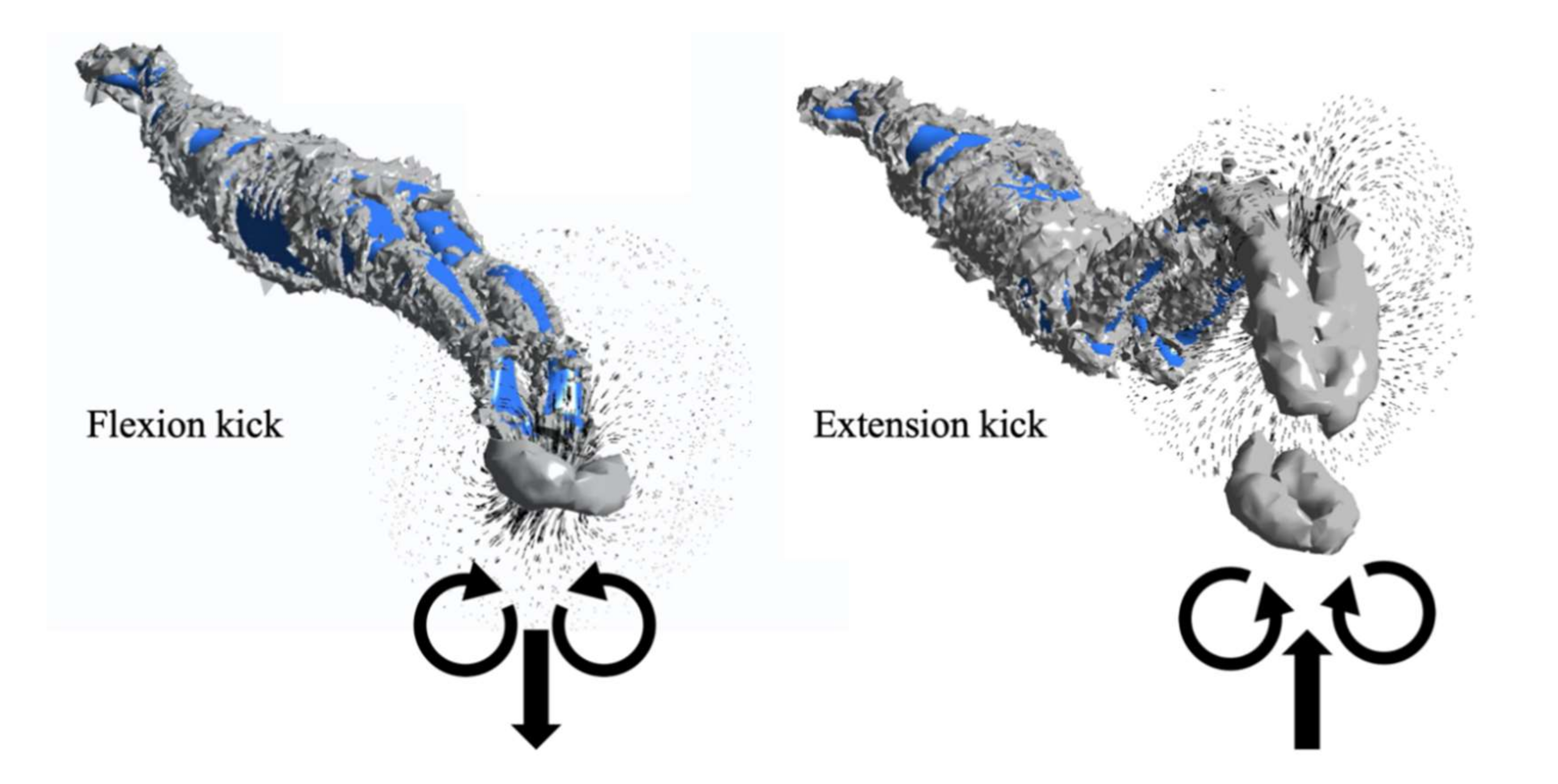
3.4.2. Velocity Vector of Flow Field
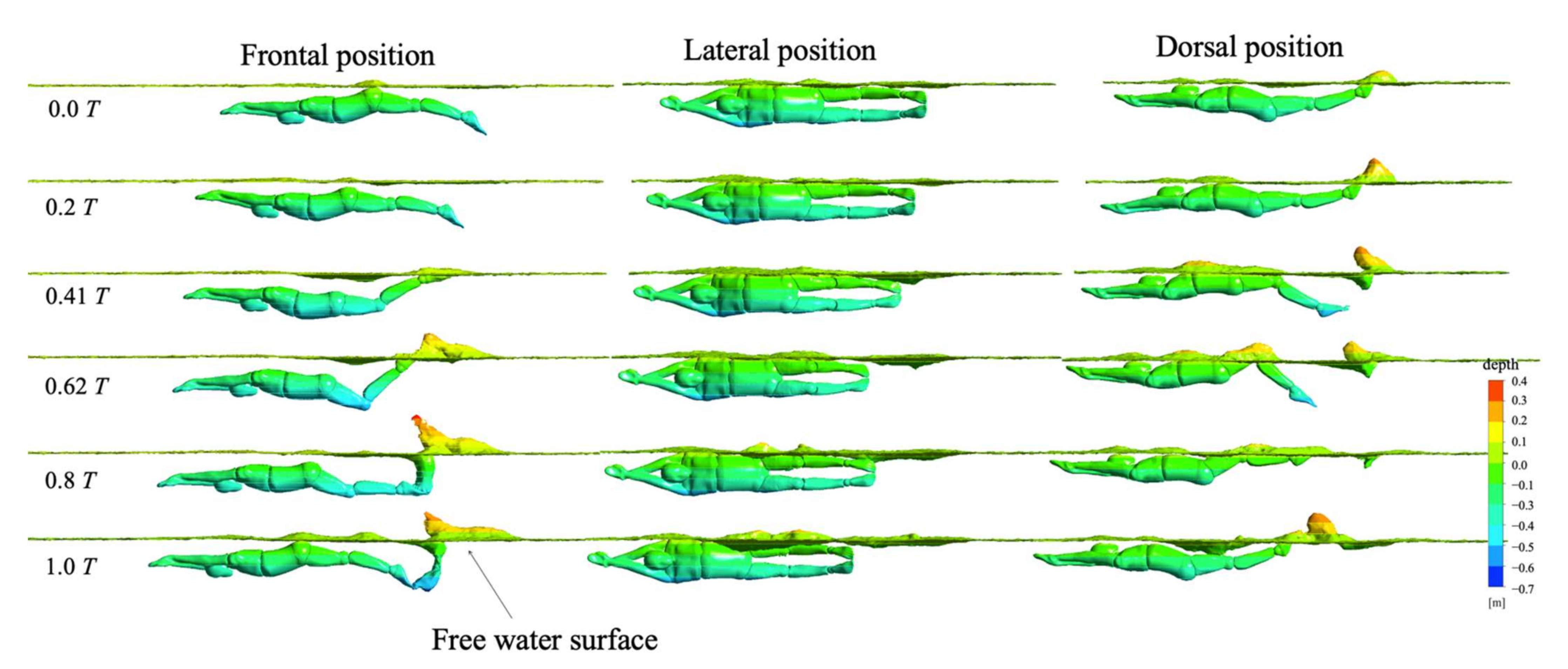
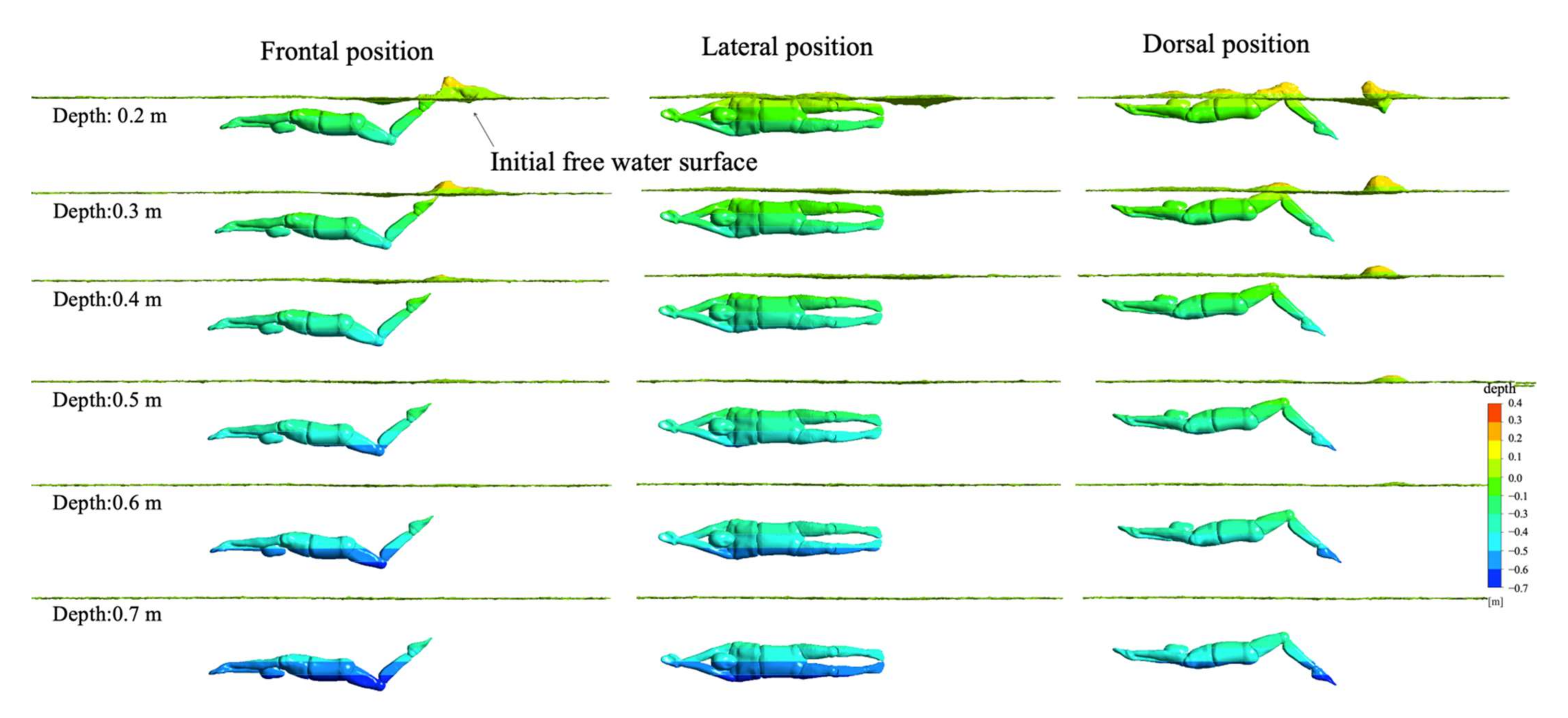
3.4.3. Water Surface
3.4.4. Limitations and Prospects
4. Conclusions
- (1)
- The validity of the numerical swimming velocity was demonstrated by comparing the computed results with the experimental data. In addition, this study provides a new method to analyze the hydrodynamic characteristics (drag, thrust, flow field visualization, etc.) of dynamic swimming movement, which is valuable for diagnosing swimming techniques and helps coaches to guide athletes to improve their performance.
- (2)
- There was a significant difference in the hydrodynamic characteristics of the three UUS positions when swimming near the water surface, and the difference decreased as the swimming depth increased. It is, therefore, recommended that swimmers travel at least 0.5 m below the surface in any UUS position in order to avoid excessive drag forces.
- (3)
- As the swimmer approaches the water surface, the swimmer should use the lateral position, which has more swimming velocity and hydrodynamic advantage than the other two UUS positions.
- (4)
- The numerical results showed that the flexion kick could also generate significant propulsion as well as the extension kick. Therefore, competitive swimmers should focus on optimizing the flexibility and amplitude of their flexion kick while working to strengthen the required musculature.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Higgs, A.J.; Pease, D.L.; Sanders, R.H. Relationships between kinematics and undulatory underwater swimming performance. J. Sports Sci. 2016, 35, 995–1003. [Google Scholar] [CrossRef] [PubMed]
- Cohen, R.; Cleary, P.W.; Mason, B.R. Simulations of dolphin kick swimming using smoothed particle hydrodynamics. Hum. Mov. Sci. 2011, 31, 604–619. [Google Scholar] [CrossRef]
- Jensen, R.K.; Mcllwain, J. Modeling of Lower Extremity Forces in the Dolphin Kick. In Swimming III: Proceedings of the Third International Symposium of Biomechanics in Swimming, Baltimore, MD, USA, 9 June 1979; International Series of Sport Sciences; University Park Press: Baltimore, MD, USA, 1979. [Google Scholar]
- Yamakawa, K.K.; Takagi, H.; Sengoku, Y. Three-dimensional analysis of hip and knee joint movements during dolphin kicking and buttery swimming. In Proceedings of the XIII th International Symposium on Biomechanics and Medicine in Swimming Proceedings, Tsukuba, Japan, 22–28 September 2017. [Google Scholar]
- Bixler, B.; Schloder, M. Computational fluid dynamics: An analytical tool for the 21st century swimming scientist. J. Swim. Res. 1996, 11, 4–22. [Google Scholar]
- Lyttle, A.; Keys, M.J. The application of computational fluid dynamics for technique prescription in underwater kicking. Port. J. Sport Sci. 2006, 6, 233–235. [Google Scholar]
- Yamakawa, M.; Mizuno, N.; Asao, S.; Tanaka, M.; Tajiri, K. Optimization of knee joint maximum angle on dolphin kick. Phys. Fluids 2020, 32, 067105. [Google Scholar] [CrossRef]
- Mittal, R.; Dong, H.; Bozkurttas, M.; Loebbecke, A.V.; Najjar, F. Analysis of Flying and Swimming in Nature Using an Immersed Boundary Method. In Proceedings of the 36th AIAA Fluid Dynamics Conference and Exhibit, San Francisco, CA, USA, 5–8 June 2006. [Google Scholar] [CrossRef] [Green Version]
- Loebbecke, A.V.; Mittal, R.; Fish, F.; Mark, R. Propulsive efficiency of the underwater dolphin kick in humans. J. Biomech. Eng. 2009, 131, 054504. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhan, J.M.; Li, T.Z.; Chen, X.B.; Li, Y.S.; Wai, W.H. 3d numerical simulation analysis of passive drag near free surface in swimming. China Ocean Eng. 2015, 29, 265–273. [Google Scholar] [CrossRef]
- Zhan, J.M.; Li, T.Z.; Chen, X.B.; Li, Y.S. Hydrodynamic analysis of human swimming based on VOF method. Comput. Methods Biomech. Biomed. Eng. 2017, 20, 645–652. [Google Scholar] [CrossRef] [PubMed]
- Li, T.Z.; Zhan, J.M. Hydrodynamic body shape analysis and their impact on swimming performance. Acta Bioeng. Biomech. 2015, 17, 3–11. [Google Scholar] [CrossRef]
- Bixler, B.; Pease, D.; Fairhurst, F. The accuracy of computational fluid dynamics analysis of the passive drag of a swimmer. Sports Biomech. 2007, 6, 81–98. [Google Scholar] [CrossRef] [PubMed]
- Toussaint, H.M.; de Groot, G.; Savelberg, H.H.; Vervoorn, K.; Hollander, A.P.; van Ingen Schenau, G.J. Active drag related to velocity in male and female swimmers. J. Biomech. 1988, 21, 435–438. [Google Scholar] [CrossRef]
- Elaine, T.; Peasea, D.L.; Ball, K.A. Comparing three underwater trajectories of the swimming start. J. Sci. Med. Sport 2015, 18, 725–729. [Google Scholar] [CrossRef]
- Gavilqn, A.; Arellano, R.H.; Sanders, R. Underwater undulatory swimming: Study of frequency, amplitude and phase characteristics of the “body wave”. In Proceedings of the Biomechanics and Medicine in Swimming X, Porto, Portugal, 16–19 June 2006. [Google Scholar]
- Nakashima, M.; Satou, K.; Miura, Y. Development of Swimming Human Simulation Model Considering Rigid Body Dynamics and Unsteady Fluid Force for Whole Body. J. Fluid Sci. Technol. 2007, 2, 56–67. [Google Scholar] [CrossRef] [Green Version]
- Nakashima, M. Mechanical Study of Standard Six Beat Front Crawl Swimming by Using Swimming Human Simulation Model. J. Fluid Sci. Technol. 2007, 71, 290–301. [Google Scholar] [CrossRef]
- Nakashima, M. Simulation Analysis of the Effect of Trunk Undulation on Swimming Performance in Underwater Dolphin Kick of Human. J. Biomech. Sci. Eng. 2009, 4, 94–104. [Google Scholar] [CrossRef] [Green Version]
- Denavit, J.; Hartenberg, R.S. Closure to Discussions of ‘A Kinematic Notation for Lower-Pair Mechanisms Based on Matrices’. J. Appl. Mech. 1956, 23, 153. [Google Scholar] [CrossRef]
- Li, T.Z.; Wai, O.; Gong, Y.J.; Zhan, J.M. Numerical and experimental investigation of a six DOF scaled model of a swimmer posed in streamlined posture. Comput. Fluids 2017, 149, 1–11. [Google Scholar] [CrossRef]
- Li, T.; Cai, W.; Zhan, J.; Barbosa, T.M. Numerical Investigation of Swimmer’s Gliding Stage with 6-DOF Movement. PLoS ONE 2017, 12, e0170894. [Google Scholar] [CrossRef]
- Connaboy, C.; Coleman, S.; Sanders, R.H. Hydrodynamics of undulatory underwater swimming: A review. Sports Biomech. 2009, 8, 360–380. [Google Scholar] [CrossRef]
- Colman, V.; Persyn, U.; Ungerechts, B. A mass of water added to the swimmer’s mass to estimate the velocity in dolphin-like swimming below the water surface. In Proceedings of the VIII International Symposium on Biomechanics and Medicine in Swimming, Jyväskylä, Finland, 6 June–2 July 1998. [Google Scholar]
- Morougo, P.; Keskinen, K.L.; Vilas-Boas, J.P.; Fernandes, R.J. Relationship between tethered forces and the four swimming techniques performance. J. Appl. Biomech. 2011, 27, 161–169. [Google Scholar] [CrossRef] [Green Version]
- Nagle, J.A.; Abt, J.; Beals, K.; Connaboy, C.; Dever, D.D.; Olenick, A.; Nagle, E.F. Tethered Swimming Test: Reliability And The Association To Swimming Performance And Land-based Anaerobic Performance: 1596 Board #249 June 2, 9: 00 A.M.–10: 30 A.M. J. Strength Cond. Res. 2016, 48, 439–452. [Google Scholar] [CrossRef]
- Shimojo, H.; Sengoku, Y.; Miyoshi, T.; Tsubakimoto, S.; Takagi, H. Effect of imposing changes in kick frequency on kinematics during undulatory underwater swimming at maximal effort in male swimmers. Hum. Mov. Sci. 2014, 38, 94–105. [Google Scholar] [CrossRef] [PubMed]
- Atkison, R.R.; Dickey, J.P.; Dragunas, A.; Nolte, V. Importance of sagittal kick symmetry for underwater dolphin kick performance. Hum. Mov. Sci. 2014, 33, 298–311. [Google Scholar] [CrossRef] [PubMed]
- Willems, T.M.; Cornelis, J.; Deurwaerder, L.D.; Roelandt, F.; Mits, S.D. The effect of ankle muscle strength and flexibility on dolphin kick performance in competitive swimmers. Hum. Mov. Sci. 2014, 36, 167–176. [Google Scholar] [CrossRef] [PubMed]
- Arellano, R.; Terrés-Nicoli, J.; Redondo, J.M. Fundamental hydrodynamics of swimming propulsion. Port. J. Sport Sci. 2006, 6, 15–20. [Google Scholar]
- Loebbecke, A.V.; Mittal, R.; Fish, F.; Mark, R. A comparison of the kinematics of the dolphin kick in humans and cetaceans. Hum. Mov. Sci. 2009, 28, 99–112. [Google Scholar] [CrossRef]
- Elaine, T.; Pease, D.L.; Ball, K.A. How Does Drag Affect the Underwater Phase of a Swimming Start? J. Appl. Biomech. 2015, 31, 8–12. [Google Scholar] [CrossRef]
- Linden, P.F.; Turner, J.S. The formation of ‘optimal’ vortex rings, and the efficiency of propulsion devices. J. Fluid Mech. 2001, 427, 61–72. [Google Scholar] [CrossRef] [Green Version]
- Videler, J.J.; Müller, U.; Stamhuis, E.J. Aquatic vertebrate locomotion: Wakes from body waves. J. Exp. Biol. 2000, 202, 3423–3430. [Google Scholar] [CrossRef]
- Pease, D. Wave Drag in Human Swimming. In Proceedings of the 30th International Conference on Biomechanics in Sports, Melbourne, Australia, 2–6 July 2012. [Google Scholar]
- Du, P.; Ouahsine, A.; Sergent, P.; Hu, H. Resistance and wave characterizations of inland vessels in the fully-confined waterway. Ocean Eng. 2020, 210, 107580. [Google Scholar] [CrossRef]
- Du, P.; Ouahsine, A.; Toan, K.T.; Sergent, P. Simulation of ship maneuvering in a confined waterway using a nonlinear model based on optimization techniques. Ocean Eng. 2017, 142, 194–203. [Google Scholar] [CrossRef]
- Du, P.; Wen, J.; Zhang, Z.; Song, D.; Ouahsine, A.; Hu, H. Maintenance of air layer and drag reduction on superhydrophobic surface. Ocean Eng. 2017, 130, 328–335. [Google Scholar] [CrossRef]
- Novais, M.; Silva, A.; Mantha, V.; Ramos, R.; Rouboa, A.; Vilas-Boas, J.; Marinho, D. The effect of depth on drag during the streamlined glide: A three-dimensional CFD analysis. J. Hum. Kinet. 2012, 33, 55–62. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Depth (0.2–0.7 m) | |||
|---|---|---|---|
| R | p-Value | Mean (m·s−1) | |
| Dorsal position | −0.928 | <0.001 ** | 1.69 |
| Frontal position | −0.937 | <0.001 ** | 1.70 |
| Lateral position | −0.930 | <0.001 ** | 1.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Li, T.; Chen, Z.; Zuo, C.; Li, X. Hydrodynamic Characteristics of Different Undulatory Underwater Swimming Positions Based on Multi-Body Motion Numerical Simulation Method. Int. J. Environ. Res. Public Health 2021, 18, 12263. https://doi.org/10.3390/ijerph182212263
Yang J, Li T, Chen Z, Zuo C, Li X. Hydrodynamic Characteristics of Different Undulatory Underwater Swimming Positions Based on Multi-Body Motion Numerical Simulation Method. International Journal of Environmental Research and Public Health. 2021; 18(22):12263. https://doi.org/10.3390/ijerph182212263
Chicago/Turabian StyleYang, Jin, Tianzeng Li, Zhiya Chen, Chuan Zuo, and Xiaodong Li. 2021. "Hydrodynamic Characteristics of Different Undulatory Underwater Swimming Positions Based on Multi-Body Motion Numerical Simulation Method" International Journal of Environmental Research and Public Health 18, no. 22: 12263. https://doi.org/10.3390/ijerph182212263
APA StyleYang, J., Li, T., Chen, Z., Zuo, C., & Li, X. (2021). Hydrodynamic Characteristics of Different Undulatory Underwater Swimming Positions Based on Multi-Body Motion Numerical Simulation Method. International Journal of Environmental Research and Public Health, 18(22), 12263. https://doi.org/10.3390/ijerph182212263