
Effects of a Passive Back-Support Exoskeleton on Knee Joint Loading during Simulated Static Sorting and Dynamic Lifting Tasks


Abstract
:1. Introduction
2. Materials and Methods
2.1. Sample Size and Study Design
2.2. Participants
2.3. Exoskeleton
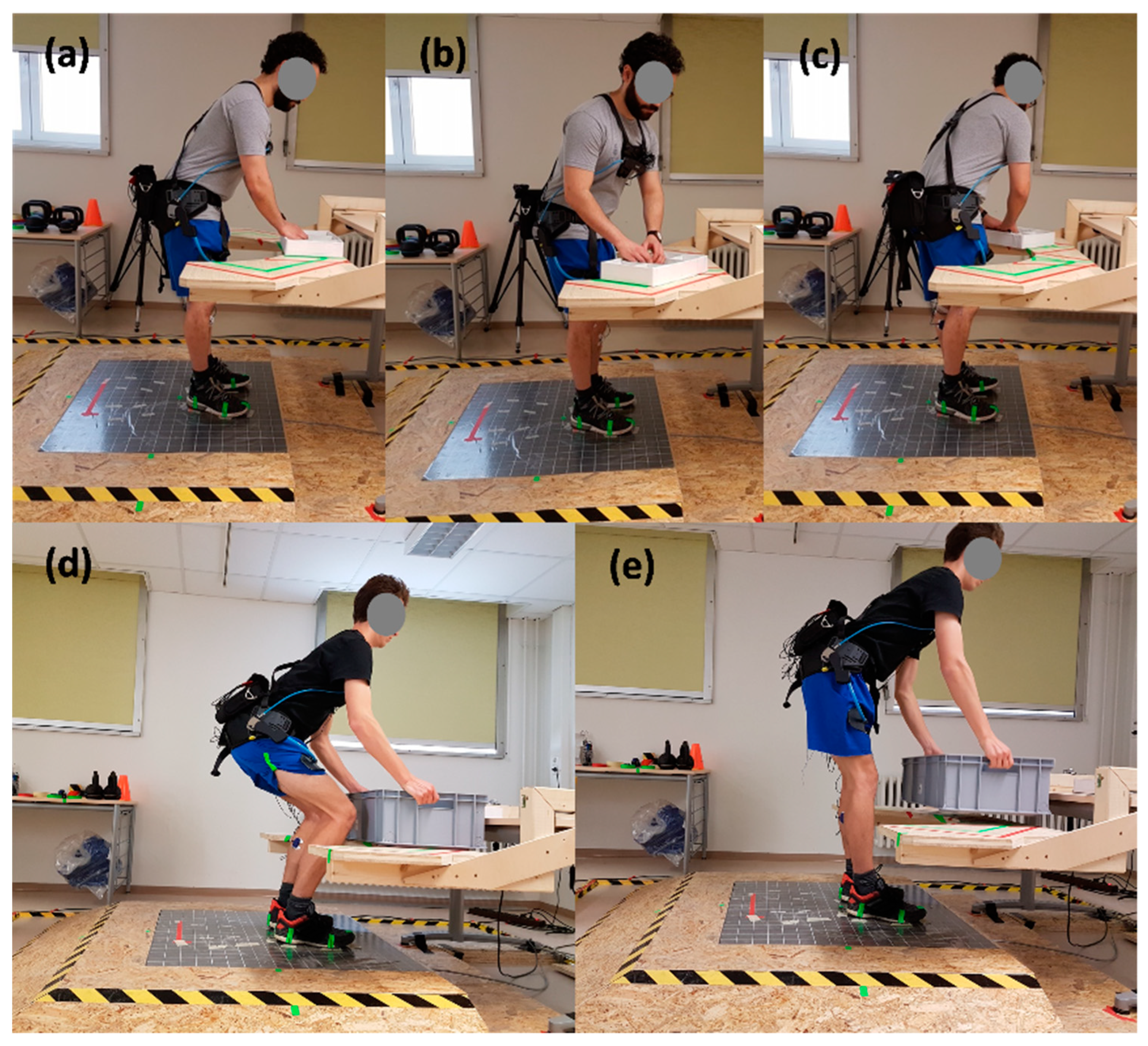
2.4. Experimental Procedure and Tasks
2.5. Measurement and Data Analysis
2.6. Statistical Aanalysis
3. Results
3.1. Static Task
3.2. Dynamic Task
3.3. Support Moment
4. Discussion
4.1. Limitations
4.2. Key Points
- The changes detected for HOR and VERT seem rather small and may not exceed typical ranges. However, it remains unclear what additional effect even small increases in acting knee joint forces have on musculoskeletal knee joint health, considering the contribution of cumulative loads to MSD of the knee.
- This evaluation shows that the side effects of using an exoskeleton depend on the work task executed (i.e., knee and trunk postures). Therefore, the decision to implement a BSE or not needs to depend on the individual work tasks.
- Back-support exoskeletons should be as light as possible, as their own weight seems to directly increase the vertical forces acting on the knee joint.
- Potential side effects, such as changes in knee joint forces, should be considered early in the development of a BSE.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Inverse Quasi-Static Model Used for the Knee Force Calculations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ground reaction force (GRF) in three directions [N]: ) ) ) | Force plate system linked to a signal conditioner and digitizer (FP9090-15-1000; Analog and Digital Amplifier AM6800; resulting resolution 0.5 N and 125 ms in time; Overall maximum error ≤ 6 N *; Bertec Corporation, Columbus, OH, USA) |
| Ground reaction force vector coordinates (x, y) [mm] , | |
| ) onto both feet [N] | The vertical ground reaction force vector on the force plate was recorded continuously, and the x and y coordinates of both ankle joints were kept constant during the experiments (see explanation above). The total ground reaction force was distributed over both feet using an equation estimating the proportion to the ground reaction force of each foot.  will be used. |
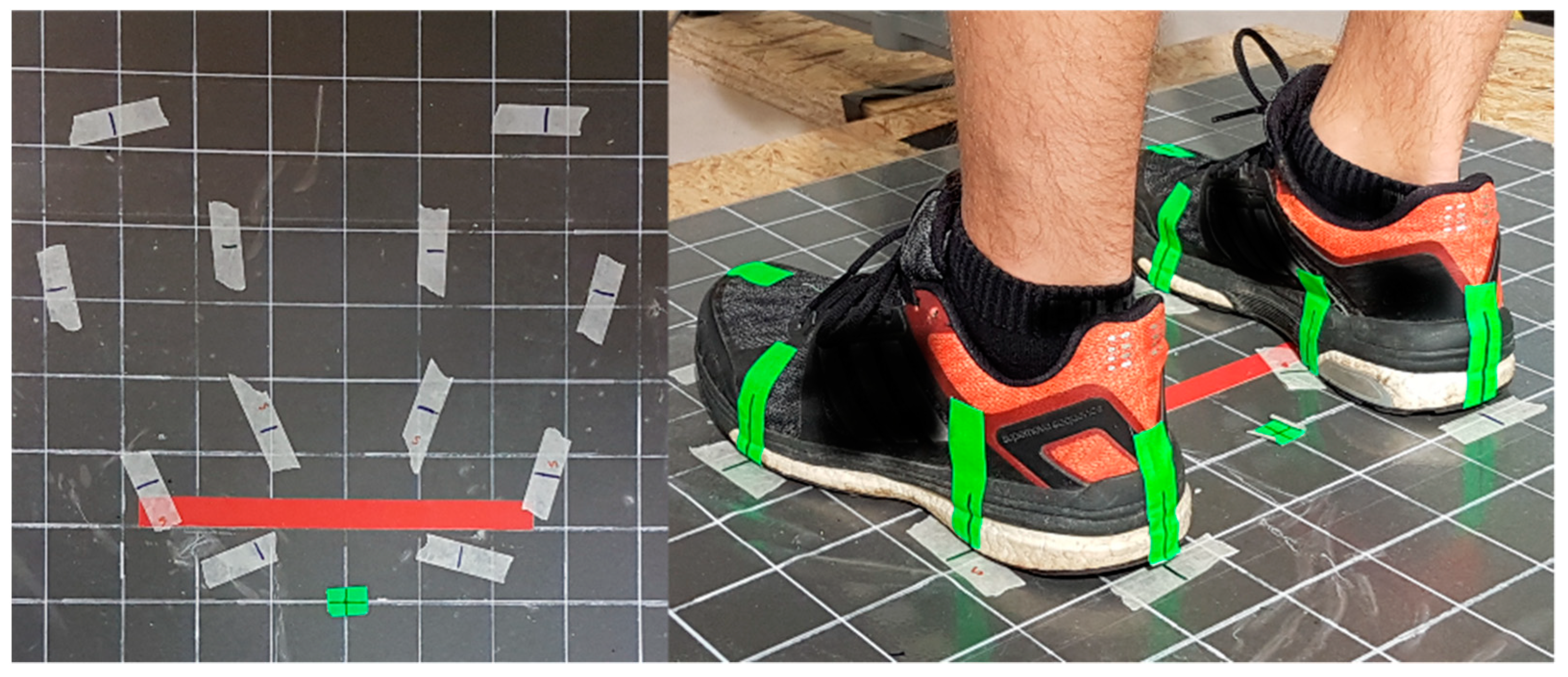
| Coordinates (x, y) of both ankle joint centers of the subjects during the experiments standing on the force plate [mm] , | The position of both feet was measured and marked prior to the experiments and controlled to always stay in the preset position (Cf. manuscript Section 2.4 Experimental procedure and tasks and Figure 2). The y-position of both, the left and right forefoot was assured to be equal. The x- and y- coordinates of the lateral and medial malleolus were marked on the force plate and the midpoint of the tie line connecting these two points was calculated and used to estimate the x- and y- coordinates of the ankle joints. |
| Force of the Laevo® chest pad against the subject’s sternum [µV] ) | Measured by a force sensor manually integrated in the chest pad (diameter 38 × thickness 10 mm; Type KM38-1 kN, ME-Messsysteme GmbH, Henningsdorf, Germany), connected to a sampling and storage device (PS12-II; Resolution: 0.1 N; estimated typical error: 0.5 N; maximum error: 1 N) An occurring measurement error depends mainly on undesirable shear forces and undesirable moments acting on the sensor. Estimated typical and maximum measurement errors were determined using known applied forces, shear forces and moments. The shear forces and moments that actually occur during the test were estimated in a qualified manner. |
| Inclination angles of femur and tibia relative to the perpendicular [°] | Measured by gravimetric inclination sensors connected to a sampling and storage device (PS12-II with 2.5D-gravimetrical sensors; THUMEDI GmbH & Co. KG, resolution 0.1° and 125 ms in time; maximum static error 0.5°; maximum repetition error 0.2°) |
| Body mass [kg] | Measured with a scale prior to the experiment at the subjects’ first visit in our lab; similar clothing was worn as in the experiment. |
| Body height [mm] | Measured during an upright stance with the back straight against a wall, feet hip width apart, facing straight ahead. |
| Partial foot length (distance of the medial sesamoid and malleolus) [mm] ** | Measured between the most prominent points over the medial sesamoid and malleolus. |
| Shank length [mm] ** | Measured on the lateral outside of the shank between the knee joint gap and the malleolus. |
| Thigh length [mm] ** | Measured on the lateral outside of the thigh between the knee joint gap and the trochanter major. |
| Foot mass [kg] ) | [33] |
| Foot + shoe mass [kg] ) | Five different sports shoes of different owners were weighed and their relative weight to the foot mass of the owners was calculated. The average relative shoe mass was 0.3229. To estimate the total mass of foot plus shoe, the previously estimated foot mass was multiplied by factor 1.3229. |
| ) | |
| [33] | |
| [32] | |
| Distance between the ankle joint and the center of mass (COM) of the foot (including the shoe) [mm] | [32] |
| Radius ankle center to Achilles tendon [mm] ) |
|
| ) |
|
| Relevant measures of the Laevo® exoskeleton | Distance smart joint to leg pad: 200 mm Distance smart joint to chest pad: 405 mm (S-size)/435 mm (L-size) |
Appendix A.1. Description of the Model
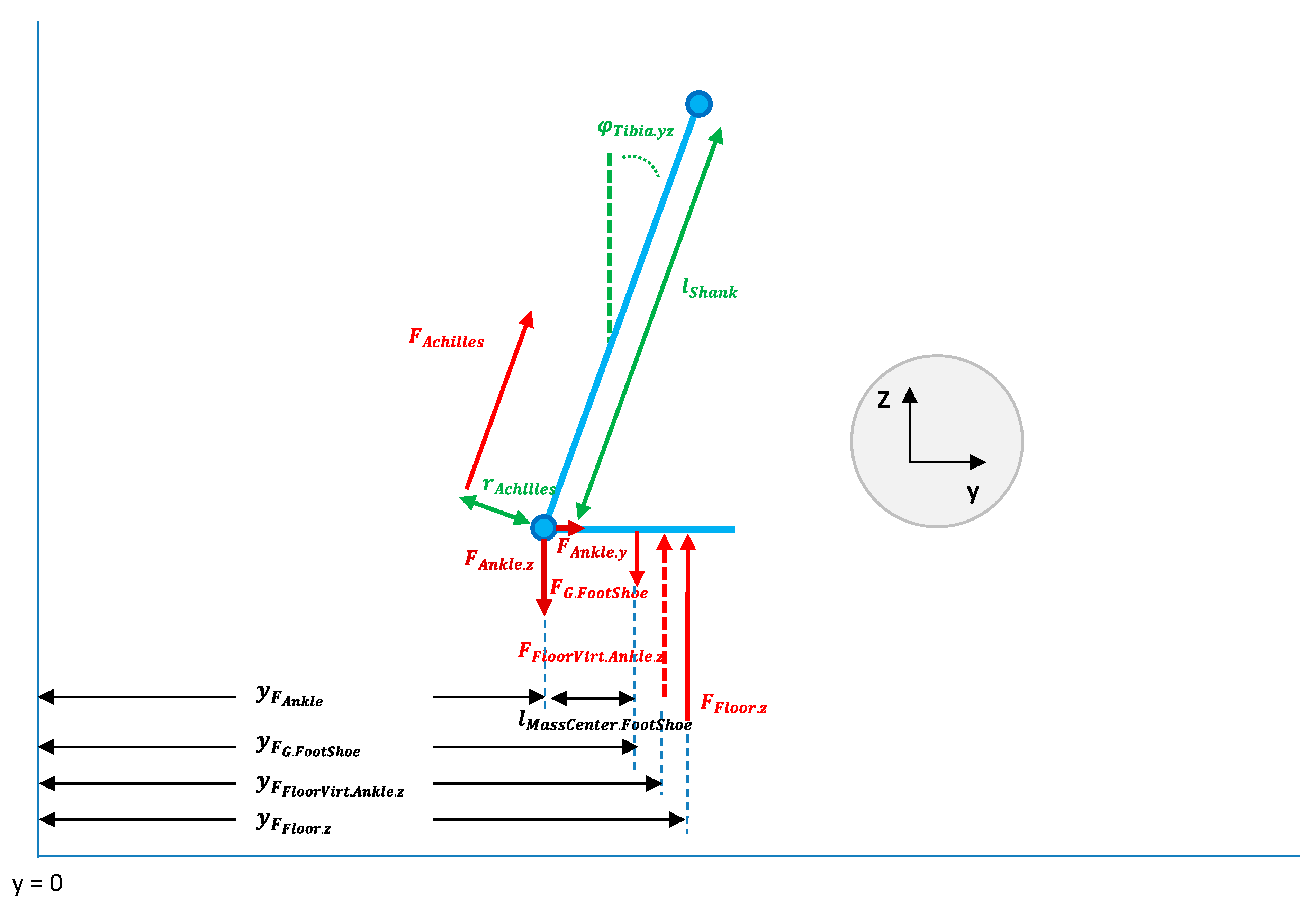
Appendix A.1.1. Ankle Joint Forces
| Symbol | Description |
|---|---|
| Angle between tibia and the perpendicular (in y/z-direction). | |
| Shank length. | |
| Forces acting on the Achilles tendon. | |
| Radius of ankle joint center to Achilles tendon. | |
| Force acting on the ankle joint in z-direction. | |
| Force acting on the ankle joint in y-direction. | |
| Segment weight of foot + shoe. | |
| Virtual ground reaction force in z-direction, excluding foot + shoe mass. | |
| Ground reaction force in z-direction. | |
| Y-position of the ankle joint. | |
| Y-position of the force vector of the foot + shoe center of mass. | |
| Y-position of the virtual ground reaction force vector, excluding foot + shoe mass. | |
| Y-position of the total ground reaction force vector. | |
| Distance between the ankle joint and the mass center of foot + shoe. | |
| Symbol | Equation |

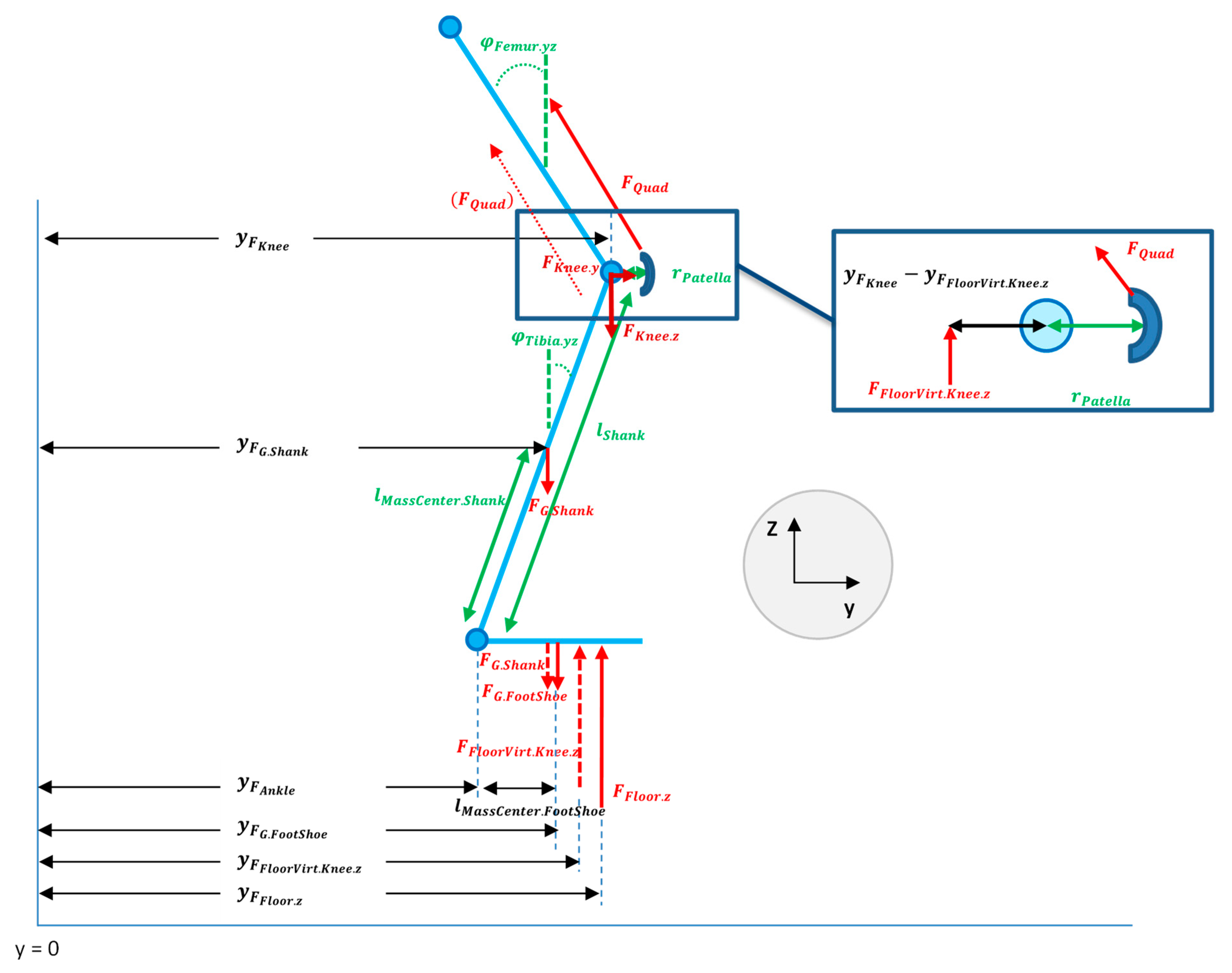
Appendix A.1.2. Knee Joint Forces
| Symbol | Description |
|---|---|
| = Angle between femur and the perpendicular (y/z-direction) | |
| = Force acting at the Quadriceps tendon | |
| = Radius of knee joint center to patella | |
| = Force at the knee joint in z-direction (without exoskeleton) | |
| = Force at the knee joint in y-direction (without exoskeleton) | |
| = Angle between tibia and the perpendicular (in y/z-direction) | |
| = Shank length | |
| = Distance between the ankle joint and the mass center of the shank | |
| = Segment weight of the shank | |
| = Virtual ground reaction force in z-direction, excluding foot + shoe + shank mass | |
| = Segment weight of foot + shoe | |
| = Ground reaction force in z-direction | |
| = Y-position of the knee joint | |
| = Y-position of the force vector of the shank center of mass | |
| = Y-position of the ankle joint | |
| = Y-position of the force vector of the foot + shoe center of mass | |
| = Y-position of the virtual ground reaction force vector, excluding foot + shoe and shank mass | |
| = Y-position of the total ground reaction force vector | |
| = Distance between the ankle joint and the mass center of foot + shoe | |
| Symbol | Equation |

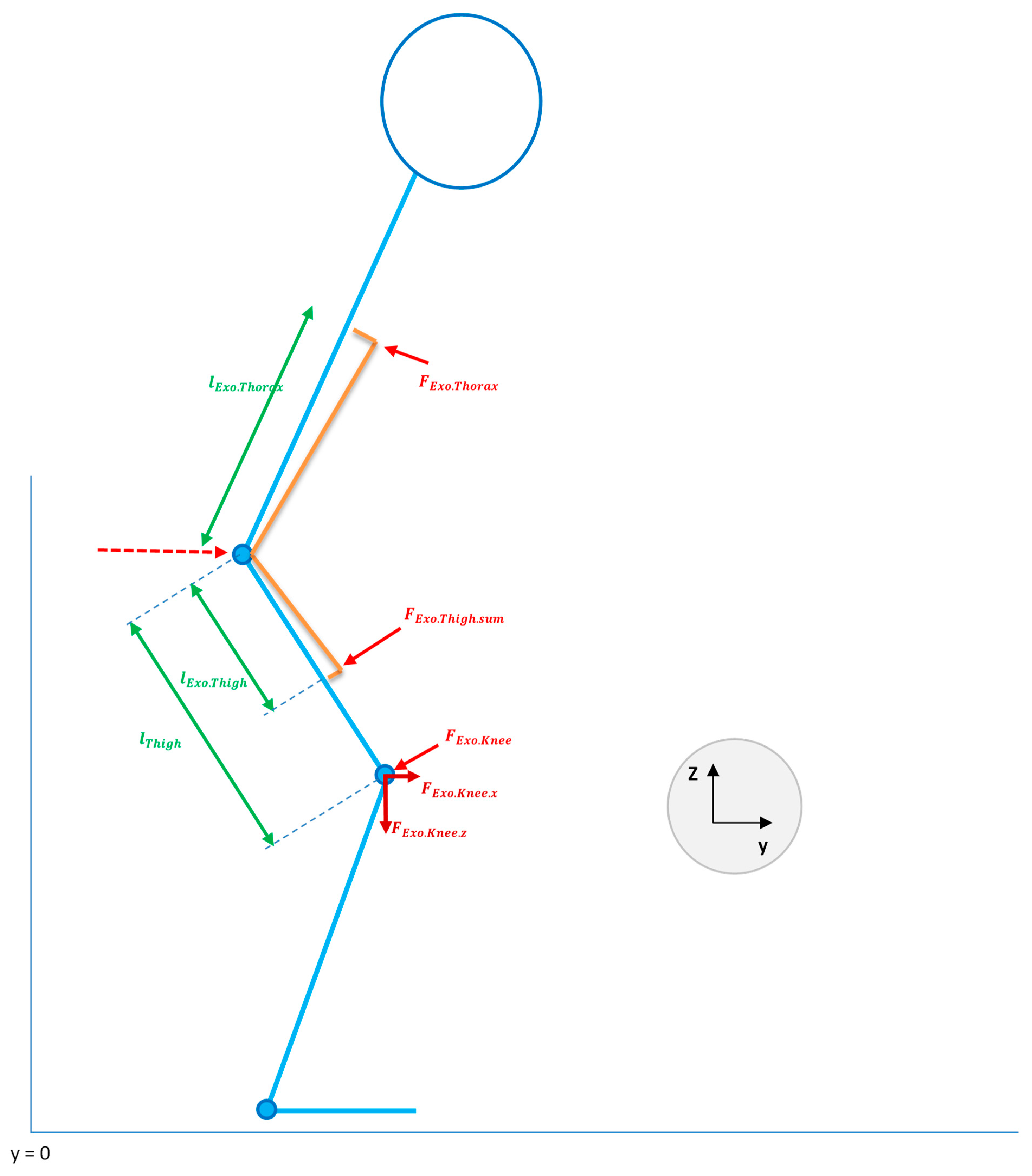
Appendix A.1.3. Contribution of the Laevo® Exoskeleton
| Symbol | Description |
|---|---|
| = Distance between the smart joints and the chest pad | |
| = Thigh length | |
| = Distance between the smart joints and the leg pads | |
| = Angle between femur and the perpendicular (y/z-direction) | |
| = Force acting on the chest pad | |
| = Force acting on the leg pads | |
| = Force acting on the knee induced by the exoskeleton | |
| = Force acting on the knee induced by the exoskeleton in y-direction | |
| = Total force at the knee joint in z-direction (exoskeleton included) | |
| = Total force at the knee joint in y-direction (exoskeleton included) | |
| Symbol | Equation |

Appendix A.1.4. Limitations
- Cf. Section 4.1 Limitations (manuscript)
- In this model, solely the vertical component (z-direction) of the ground reaction force is integrated; both horizontal acting components (x- and y-direction) of the ground reaction force are presumed to be extremely low in the here presented work tasks due to the experimental design. (No horizontal movements of the lower limbs and no fast movements have been included. Horizontal forces may only occur for short moments and to a small extent, due to the mass inertia during movement.)
- The calculated sum of the force generated by the exoskeleton and acting on the subject’s thighs was distributed onto both legs to be loaded by 50% each. This simplification of the model was applied instead of considering the individual angles between each upper leg and the trunk, because only one leg was prepared with the measurement equipment. Assuming that the subjects bent their trunk relative to their upper limbs similar between both body sides, the resulting division of the forces were exact. The expected error according to this simplification may be minimal since the main contribution to the knee joint loading is caused by the subjects’ body weight and not by the exoskeleton.
- We did not find any standard terms for calculating or estimating the and in the available literature; therefore, we used own measurements for calculating an average ratio of the radius and in relation to body size. Errors might result from this simplification in our model since the real individual distances were not considered. However, we used a within-subject-design, comparing the different conditions within each subject. Therefore, the relative changes between conditions can be used for comparison.
- The ankle and knee joints were treated like a simple hinge joints; other aspects of the joint functions and movement variances were neglected.
- Torsional forces were neglected. However, the Laevo® is not designed to support torsional forces and is unable to absorb those. Therefore, the exoskeleton should not have any impact on torsional forces at the knee joints.
- The pivot point of a joint is not necessarily central which is assumed in this model. Further, when a body is moving the pivot point of a joint is shifting. The virtual pivot point of the joints is neglected in the model.
- The model includes forces which are produced by muscles responsible for the main movement in the work task (agonists). Forces which are induced by the antagonistic muscles (e.g., the biceps femoris) are not considered. Kellis and Baltzopoulos [58] showed an influence of including the antagonistic (hamstrings) muscle force into a two-dimensional tibiofemoral joint force model which increased the posteriorly directed shear and compression forces. In our force estimating model the antagonistic muscle force has only been partly included (calf muscle forces but not hamstrings), which could have biased the calculated knee forces.
- Gravimetric positions sensors provide a very high precision in static postures and slower movements (standard error ≤ 0.5°). In fast movements including high accelerations (which were not included in this experiments) these sensors are less precise; other techniques (i.e., motion capture systems) should then be applied.
Appendix B
| Task | Effect | HOR50 | HOR90 | VERT50 | VERT90 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| F | p | F | p | F | p | F | p | ||||||
| Static | E | 0.16 | 0.696 | 0.006 | - | - | - | 7.41 | 0.011 | 0.209 | - | - | - |
| E × TO | 27.60 | <0.001 * | 0.496λ | 1.19 | 0.313 | 0.041 | |||||||
| Dynamic | E | 7.24 | 0.012 * | 0.205μ | 0.02 | 0.888 | 0.001 | 16.85 | <0.001 * | 0.376λ | 1.64 | 0.211 | 0.054σ |
| E × TO | 23.34 | <0.001 * | 0.455λ | 11.90 | <0.001 * | 0.292λ | 1.02 | 0.368 | 0.035σ | 0.16 | 0.852 | 0.005 | |
| E × LS | 24.96 | <0.001 * | 0.471λ | 8.84 | 0.006 * | 0.236μ | 1.52 | 0.227 | 0.052σ | 4.06 | 0.053 | 0.121σ | |
| E × TO × LS | 7.04 | 0.002 * | 0.201μ | 1.52 | 0.227 | 0.049σ | 2.96 | 0.060 | 0.096σ | 2.60 | 0.083 | 0.086σ | |
| Task | Effect | Trunk Orient | Lifting Style | HOR50 | HOR90 | ||
|---|---|---|---|---|---|---|---|
| p | d | p | d | ||||
| Stat | E × TO | ipsi | 0.372 | 0.083 | n.a. | n.a. | |
| front | 0.091 | 0.269σ | n.a. | n.a. | |||
| cont | <0.001 * | −0.912λ | n.a. | n.a. | |||
| Dyn | E × TO | ipsi | 0.311 | −0.045 | 0.981 | −0.024 | |
| front | 0.834 | 0.018 | 0.028 | 0.230σ | |||
| cont | <0.001 * | −0.493σ | 0.013 | −0.244σ | |||
| E × LS | Squat | <0.001 * | −0.261σ | 0.033 | −0.139 | ||
| Stoop | 0.276 | 0.072 | 0.050 | 0.145 | |||
| E × TO × LS | ipsi | Squat | <0.001 * | −0.195 | − | − | |
| Stoop | 0.024 | 0.166 | − | − | |||
| front | Squat | 0.001 | −0.335σ | − | − | ||
| Stoop | <0.001 * | 0.597μ | − | − | |||
| cont | Squat | <0.001 * | −0.487σ | − | − | ||
| Stoop | <0.001 * | −0.717μ | − | − | |||
References
- DeKok, J.; Vroonhof, P.; Snijders, J.; Roullis, G.; Clarke, M.; Peereboom, K.; vanDorst, P.; Isusi, I. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU; European Agency for Safety and Health at Work (EU-OSHA): Luxembourg, 2019. [Google Scholar]
- Dick, R.B.; Lowe, B.D.; Lu, M.L.; Krieg, E.F. Trends in work-related musculoskeletal disorders from the 2002—2014 General Social Survey, Quality of Work Life supplement. J. Occup. Environ. Med. 2020, 62, 595. [Google Scholar] [CrossRef] [PubMed]
- Coenen, P.; Kingma, I.; Boot, C.R.; Twisk, J.W.; Bongers, P.M.; van Dieen, J.H. Cumulative low back load at work as a risk factor of low back pain: A prospective cohort study. J. Occup. Rehabil. 2013, 23, 11–18. [Google Scholar] [CrossRef]
- Steinhilber, B.; Luger, T.; Schwenkreis, P.; Middeldorf, S.; Bork, H.; Mann, B.; von Glinski, A.; Schildhauer, T.A.; Weiler, S.; Schmauder, M.; et al. The use of exoskeletons in the occupational context for primary, secondary, and tertiary prevention of work-related musculoskeletal complaints. IISE Trans. Occup. Ergon. Hum. Factors 2020, 8, 132–144. [Google Scholar] [CrossRef]
- Toxiri, S.; Näf, M.B.; Lazzaroni, M.; Fernández, J.; Sposito, M.; Poliero, T.; Monica, L.; Anastasi, S.; Caldwell, D.G.; Ortiz, J. Back-support exoskeletons for occupational use: An overview of technological advances and trends. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 237–249. [Google Scholar] [CrossRef]
- Bär, M.; Steinhilber, B.; Rieger, M.A.; Luger, T. The influence of using exoskeletons during occupational tasks on acute physical stress and strain compared to no exoskeleton—A systematic review and meta-analysis. Appl. Ergon. 2021, 94, 103385. [Google Scholar] [CrossRef]
- Koopman, A.S.; Kingma, I.; de Looze, M.P.; van Dieën, J.H. Effects of a passive back exoskeleton on the mechanical loading of the low-back during symmetric lifting. J. Biomech. 2020, 102, 109486. [Google Scholar] [CrossRef]
- Baltrusch, S.J.; van Dieen, J.H.; Koopman, A.S.; Naf, M.B.; Rodriguez-Guerrero, C.; Babic, J.; Houdijk, H. SPEXOR passive spinal exoskeleton decreases metabolic cost during symmetric repetitive lifting. Eur. J. Appl. Physiol. 2020, 120, 401–412. [Google Scholar] [CrossRef]
- Alemi, M.M.; Madinei, S.; Kim, S.; Srinivasan, D.; Nussbaum, M.A. Effects of two passive back-support exoskeletons on muscle activity, energy expenditure, and subjective assessments during repetitive lifting. Hum. Factors 2020, 62, 458–474. [Google Scholar] [CrossRef]
- Madinei, S.; Alemi, M.M.; Kim, S.; Srinivasan, D.; Nussbaum, M.A. Biomechanical assessment of two back-support exoskeletons in symmetric and asymmetric repetitive lifting with moderate postural demands. Appl. Ergon. 2020, 88, 103156. [Google Scholar] [CrossRef]
- Luger, T.; Bär, M.; Seibt, R.; Rimmele, P.; Rieger, M.A.; Steinhilber, B. A passive back exoskeleton supporting symmetric and asymmetric lifting in stoop and squat posture reduces trunk and hip extensor muscle activity and adjusts body posture—A laboratory study. Appl. Ergon. 2021, 97, 103530. [Google Scholar] [CrossRef]
- Bosch, T.; van Eck, J.; Knitel, K.; de Looze, M. The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl. Ergon. 2016, 54, 212–217. [Google Scholar] [CrossRef]
- Koopman, A.S.; Kingma, I.; Faber, G.S.; de Looze, M.P.; van Dieën, J.H. Effects of a passive exoskeleton on the mechanical loading of the low back in static holding tasks. J. Biomech. 2019, 83, 97–103. [Google Scholar] [CrossRef]
- Graham, R.B.; Agnew, M.J.; Stevenson, J.M. Effectiveness of an on-body lifting aid at reducing low back physical demands during an automotive assembly task: Assessment of EMG response and user acceptability. Appl. Ergon. 2009, 40, 936–942. [Google Scholar] [CrossRef] [PubMed]
- Madinei, S.; Alemi, M.M.; Kim, S.; Srinivasan, D.; Nussbaum, M.A. Biomechanical evaluation of passive back-support exoskeletons in a precision manual assembly task: “Expected” effects on trunk muscle activity, perceived exertion, and task performance. Hum. Factors 2020, 62, 441–457. [Google Scholar] [CrossRef]
- Bär, M.; Luger, T.; Seibt, R.; Rieger, M.A.; Steinhilber, B. Using a Passive Back Exoskeleton during a Simulated Sorting Task: Influence on Muscle Activity, Posture, and Heart Rate. Hum. Factors 2022, 187208211073192. [Google Scholar] [CrossRef] [PubMed]
- Theurel, J.; Desbrosses, K. Occupational exoskeletons: Overview of their benefits and limitations in preventing work-related musculoskeletal disorders. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 264–280. [Google Scholar] [CrossRef]
- Kim, S.; Madinei, S.; Alemi, M.M.; Srinivasan, D.; Nussbaum, M.A. Assessing the potential for “undesired” effects of passive back-support exoskeleton use during a simulated manual assembly task: Muscle activity, posture, balance, discomfort, and usability. Appl. Ergon. 2020, 89, 103194. [Google Scholar] [CrossRef]
- Luger, T.; Bar, M.; Seibt, R.; Rieger, M.A.; Steinhilber, B. Using a Back Exoskeleton during Industrial and Functional Tasks-Effects on Muscle Activity, Posture, Performance, Usability, and Wearer Discomfort in a Laboratory Trial. Hum. Factors 2021, 187208211007267. [Google Scholar] [CrossRef]
- Frost, D.M.; Abdoli, E.M.; Stevenson, J.M. PLAD (personal lift assistive device) stiffness affects the lumbar flexion/extension moment and the posterior chain EMG during symmetrical lifting tasks. J. Electromyogr. Kinesiol. 2009, 19, e403–e412. [Google Scholar] [CrossRef]
- Alemi, M.M.; Geissinger, J.; Simon, A.A.; Chang, S.E.; Asbeck, A.T. A passive exoskeleton reduces peak and mean EMG during symmetric and asymmetric lifting. J. Electromyogr. Kinesiol. 2019, 47, 25–34. [Google Scholar] [CrossRef] [PubMed]
- Ulrey, B.L.; Fathallah, F.A. Effect of a personal weight transfer device on muscle activities and joint flexions in the stooped posture. J. Electromyogr. Kinesiol. 2013, 23, 195–205. [Google Scholar] [CrossRef]
- von Glinski, A.; Yilmaz, E.; Mrotzek, S.; Marek, E.; Jettkant, B.; Brinkemper, A.; Fisahn, C.; Schildhauer, T.A.; Geßmann, J. Effectiveness of an on-body lifting aid (HAL® for care support) to reduce lower back muscle activity during repetitive lifting tasks. J. Clin. Neurosci. 2019, 63, 249–255. [Google Scholar] [CrossRef]
- Steinhilber, B.B.M.; Caputo, G.; Seibt, R.; Rieger, M.A.; Luger, T. Einfluss eines passiven Exoskeletts zur Rückenunterstützung auf die erlebte körperliche Arbeitsbeanspruchung und Beschwerdewahrnehmung bei simulierten Tätigkeiten mit statischer Oberkörpervorneigung und dynamischen Hebebewegungen. Arb. Soz. Umweltmed. Z. Med. Prävent. 2020, 55, 494–502. [Google Scholar]
- Weston, E.B.; Alizadeh, M.; Knapik, G.G.; Wang, X.; Marras, W.S. Biomechanical evaluation of exoskeleton use on loading of the lumbar spine. Appl. Ergon. 2018, 68, 101–108. [Google Scholar] [CrossRef] [PubMed]
- Govaerts, R.; Tassignon, B.; Ghillebert, J.; Serrien, B.; De Bock, S.; Ampe, T.; El Makrini, I.; Vanderborght, B.; Meeusen, R.; De Pauw, K. Prevalence and incidence of work-related musculoskeletal disorders in secondary industries of 21st century Europe: A systematic review and meta-analysis. BMC Musculoskelet. Disord. 2021, 22, 751. [Google Scholar] [CrossRef] [PubMed]
- Da Costa, B.R.; Vieira, E.R. Risk factors for work-related musculoskeletal disorders: A systematic review of recent longitudinal studies. Am. J. Ind. Med. 2010, 53, 285–323. [Google Scholar] [CrossRef] [PubMed]
- University Hospital Tübingen. Work Physiological-Biomechanical Analysis of a Passive Exoskeleton to Support Occupational Lifting and Flexing Processes (ADVANCE). Available online: https://clinicaltrials.gov/ct2/show/NCT03725982 (accessed on 1 December 2021).
- Bate, S.T.; Jones, B. A review of uniform cross-over designs. J. Stat. Plan. Inference 2008, 138, 336–351. [Google Scholar] [CrossRef]
- Harari, Y.; Bechar, A.; Asci, S.; Riemer, R. Investigation of 3D dynamic and quasistatic models for spinal moments during combined manual material handling tasks. Appl. Ergon. 2021, 91, 103305. [Google Scholar] [CrossRef]
- Krishnan, R.H.; Devanandh, V.; Brahma, A.K.; Pugazhenthi, S. Estimation of Mass Moment of Inertia of Human Body, When Bending Forward, for the Design of a Self-Transfer Robotic Facility. J. Eng. Sci. Technol. 2016, 11, 166–176. [Google Scholar]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- NASA National Aeronautics and Space Administration. Anthropometric Source Book; Anthropometry for Designers; National Technical Informatino Service U.S. Department of Commerce: Springfield, VA, USA, 1978; Volume 1, p. 22161.
- Kim, H.Y. Statistical notes for clinical researchers: Assessing normal distribution (2) using skewness and kurtosis. Restor. Dent. Endod. 2013, 38, 52–54. [Google Scholar] [CrossRef]
- Bakeman, R. Recommended effect size statistics for repeated measures designs. Behav. Res. Methods 2005, 37, 379–384. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Lawrence Earlbaum Associates: Hillsdale, NJ, USA, 1988. [Google Scholar]
- Kaufman, K.R.; An, K.N.; Litchy, W.J.; Morrey, B.F.; Chao, E.Y.S. Dynamic Joint Forces during Knee Isokinetic Exercise. Am. J. Sport Med. 1991, 19, 305–316. [Google Scholar] [CrossRef]
- Nisell, R.; Ericson, M.O.; Nemeth, G.; Ekholm, J. Tibiofemoral Joint Forces during Isokinetic Knee Extension. Am. J. Sport Med. 1989, 17, 49–54. [Google Scholar] [CrossRef]
- Miranda, H.; Viikari-Juntura, E.; Martikainen, R.; Riihimaki, H. A prospective study on knee pain and its risk factors. Osteoarthr. Cartil. 2002, 10, 623–630. [Google Scholar] [CrossRef]
- Verbeek, J.; Mischke, C.; Robinson, R.; Ijaz, S.; Kuijer, P.; Kievit, A.; Ojajarvi, A.; Neuvonen, K. Occupational Exposure to Knee Loading and the Risk of Osteoarthritis of the Knee: A Systematic Review and a Dose-Response Meta-Analysis. Saf. Health Work 2017, 8, 130–142. [Google Scholar] [CrossRef] [PubMed]
- D’Lima, D.D.; Fregly, B.J.; Patil, S.; Steklov, N.; Colwell, C.W., Jr. Knee joint forces: Prediction, measurement, and significance. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2012, 226, 95–102. [Google Scholar] [CrossRef] [PubMed]
- D’Lima, D.D.; Patil, S.; Steklov, N.; Chien, S.; Colwell, C.W., Jr. In vivo knee moments and shear after total knee arthroplasty. J. Biomech. 2007, 40 (Suppl. S1), S11–S17. [Google Scholar] [CrossRef]
- Kutzner, I.; Heinlein, B.; Graichen, F.; Bender, A.; Rohlmann, A.; Halder, A.; Beier, A.; Bergmann, G. Loading of the knee joint during activities of daily living measured in vivo in five subjects. J. Biomech. 2010, 43, 2164–2173. [Google Scholar] [CrossRef]
- Kutzner, I.; Stephan, D.; Dymke, J.; Bender, A.; Graichen, F.; Bergmann, G. The influence of footwear on knee joint loading during walking—In vivo load measurements with instrumented knee implants. J. Biomech. 2013, 46, 796–800. [Google Scholar] [CrossRef] [PubMed]
- Taylor, S.J.; Walker, P.S.; Perry, J.S.; Cannon, S.R.; Woledge, R. The forces in the distal femur and the knee during walking and other activities measured by telemetry. J. Arthroplast. 1998, 13, 428–437. [Google Scholar] [CrossRef]
- Taylor, W.R.; Heller, M.O.; Bergmann, G.; Duda, G.N. Tibio-femoral loading during human gait and stair climbing. J. Orthop. Res. 2004, 22, 625–632. [Google Scholar] [CrossRef]
- Nagura, T.; Dyrby, C.O.; Alexander, E.J.; Andriacchi, T.P. Mechanical loads at the knee joint during deep flexion. J. Orthop. Res. 2002, 20, 881–886. [Google Scholar] [CrossRef]
- Sandmark, H.; Hogstedt, C.; Vingard, E. Primary osteoarthrosis of the knee in men and women as a result of lifelong physical load from work. Scand. J. Work Environ. Health 2000, 26, 20–25. [Google Scholar] [CrossRef]
- Coggon, D.; Croft, P.; Kellingray, S.; Barrett, D.; McLaren, M.; Cooper, C. Occupational physical activities and osteoarthritis of the knee. Arthritis Rheum. 2000, 43, 1443–1449. [Google Scholar] [CrossRef]
- Klussmann, A.; Gebhardt, H.; Nubling, M.; Liebers, F.; Perea, E.Q.; Cordier, W.; von Engelhardt, L.V.; Schubert, M.; David, A.; Bouillon, B.; et al. Individual and occupational risk factors for knee osteoarthritis: Results of a case-control study in Germany. Arthritis Res. Ther. 2010, 12, R88. [Google Scholar] [CrossRef]
- Christa Walzer, M.T. Berufskrankheiten Durch Mechanische Einwirkung—Raten Bestätigter BK-Fälle in Einzelberufen; Bundesanstalt für Arbeitsschutz und Arbeitsmezin (BAuA): Dortmund, Germany, 2016; p. 76. [Google Scholar]
- Capin, J.J.; Khandha, A.; Zarzycki, R.; Arundale, A.J.H.; Ziegler, M.L.; Manal, K.; Buchanan, T.S.; Snyder-Mackler, L. Gait mechanics and tibiofemoral loading in men of the ACL-SPORTS randomized control trial. J. Orthop. Res. 2018, 36, 2364–2372. [Google Scholar] [CrossRef]
- Costigan, P.A.; Deluzio, K.J.; Wyss, U.P. Knee and hip kinetics during normal stair climbing. Gait Posture 2002, 16, 31–37. [Google Scholar] [CrossRef]
- Mundermann, A.; Dyrby, C.O.; D’Lima, D.D.; Colwell, C.W., Jr.; Andriacchi, T.P. In vivo knee loading characteristics during activities of daily living as measured by an instrumented total knee replacement. J. Orthop. Res. 2008, 26, 1167–1172. [Google Scholar] [CrossRef]
- Taylor, W.R.; Schutz, P.; Bergmann, G.; List, R.; Postolka, B.; Hitz, M.; Dymke, J.; Damm, P.; Duda, G.; Gerber, H.; et al. A comprehensive assessment of the musculoskeletal system: The CAMS-Knee data set. J. Biomech. 2017, 65, 32–39. [Google Scholar] [CrossRef]
- Glitsch, U.; Heinrich, K.; Ellegast, R.P. Estimation of Tibiofemoral and Patellofemoral Joint Forces during Squatting and Kneeling. Appl. Sci. 2022, 12, 255. [Google Scholar] [CrossRef]
- Exoskeleton Report. Available online: https://exoskeletonreport.com/product/cray-x/ (accessed on 1 June 2022).
- Kellis, E.; Baltzopoulos, V. The effects of the antagonist muscle force on intersegmental loading during isokinetic efforts of the knee extensors. J. Biomech. 1999, 32, 19–25. [Google Scholar] [CrossRef]
- Baltrusch, S.J.; van Dieen, J.H.; Bruijn, S.M.; Koopman, A.S.; van Bennekom, C.A.M.; Houdijk, H. The effect of a passive trunk exoskeleton on metabolic costs during lifting and walking. Ergonomics 2019, 62, 903–916. [Google Scholar] [CrossRef]
- Park, J.H.; Lee, Y.; Madinei, S.; Kim, S.; Nussbaum, M.A.; Srinivasan, D. Effects of Back-Support Exoskeleton Use on Lower Limb Joint Kinematics and Kinetics during Level Walking. Ann. Biomed. Eng. 2022, 50, 964–977. [Google Scholar] [CrossRef]
- Alabdulkarim, S.; Kim, S.; Nussbaum, M.A. Effects of exoskeleton design and precision requirements on physical demands and quality in a simulated overhead drilling task. Appl. Ergon. 2019, 80, 136–145. [Google Scholar] [CrossRef]



| Work Task | Parameter | Knee Force Control [N] | Knee Force EXO [N] | Difference (EXO-Control) | |||
|---|---|---|---|---|---|---|---|
| Median | (IQR) | Median | (IQR) | [N] | % | ||
| Static | HOR50 | 49.69 | (57.28) | 46.45 | (97.75) | −3.24 | −6.5% |
| VERT50 | 693.05 | (527.15) | 700.09 | (478.77) | 7.04μ | 1.0% | |
| Dynamic | HOR50 | 52.71 | (78.66) | 36.56 | (96.11) | −16.15μ | −30.6% |
| HOR90 | 251.91 | (279.74) | 246.99 | (314.22) | −4.92 | −2.0% | |
| VERT50 | 596.91 | (376.75) | 635.64 | (375.45) | 38.74λ | 6.5% | |
| VERT90 | 1010.14 | (604.72) | 1041.61 | (599.21) | 31.47 | 3.1% | |
| (a) | Knee Force Control [N] | Knee Force EXO [N] | Difference (EXO-Control) | |||||
|---|---|---|---|---|---|---|---|---|
| Work Task | Parameter | Trunk Orient | Median | (IQR) | Median | (IQR) | [N] | % |
| Static | HOR50 | ipsi | 57.63 | (67.71) | 60.11 | (122.75) | 2.48 | 4.3% |
| front | 73.32 | (44.90) | 88.02 | (70.05) | 14.69 | 20.0% | ||
| cont | 20.73 | (23.37) | −5.47 | (48.34) | −26.19λ | −126.4% | ||
| VERT50 | ipsi | 896.48 | (423.04) | 904.65 | (433.03) | 8.17 | 0.9% | |
| front | 765.16 | (202.38) | 839.40 | (232.69) | 74.24 | 9.7% | ||
| cont | 307.59 | (168.52) | 349.64 | (173.52) | 42.05 | 13.7% | ||
| Dynamic | HOR50 | ipsi | 67.12 | (96.00) | 56.41 | (109.21) | −10.70 | −15.9% |
| front | 69.63 | (84.01) | 59.84 | (105.20) | −9.78 | −14.1% | ||
| cont | 29.84 | (41.02) | 3.53 | (53.79) | −26.30σ | −88.2% | ||
| HOR90 | ipsi | 365.43 | (326.53) | 371.04 | (346.22) | 5.62 | 1.5% | |
| front | 287.50 | (178.97) | 309.12 | (224.50) | 21.62 | 7.5% | ||
| cont | 95.25 | (115.99) | 78.93 | (110.65) | −16.32 | −17.1% | ||
| VERT50 | ipsi | 767.35 | (418.68) | 806.37 | (413.84) | 39.03 | 5.1% | |
| front | 652.35 | (313.27) | 696.94 | (300.28) | 44.59 | 6.8% | ||
| cont | 409.13 | (243.75) | 421.87 | (233.23) | 12.74 | 3.1% | ||
| VERT90 | ipsi | 1406.16 | (745.10) | 1439.82 | (723.97) | 33.66 | 2.4% | |
| front | 1009.79 | (529.94) | 1057.44 | (499.05) | 47.65 | 4.7% | ||
| cont | 798.45 | (306.43) | 809.17 | (306.52) | 10.72 | 1.3% | ||
| (b) | Knee force Control [N] | Knee force EXO [N] | Difference (EXO-Control) | |||||
| Work Task | Parameter | Lifting Style | Median | (IQR) | Median | (IQR) | [N] | % |
| Dynamic | HOR50 | Squat | 90.30 | (107.91) | 61.75 | (112.25) | −28.55σ | −31.6% |
| Stoop | 71.15 | (102.42) | 75.53 | (149.61) | 4.39 | 6.2% | ||
| HOR90 | Squat | 301.63 | (338.34) | 261.76 | (358.53) | −39.87 | −13.2% | |
| Stoop | 274.26 | (286.83) | 303.18 | (349.62) | 28.91 | 10.5% | ||
| VERT50 | Squat | 613.48 | (354.58) | 653.30 | (376.70) | 39.82 | 6.5% | |
| Stoop | 822.45 | (681.98) | 840.92 | (658.81) | 18.47 | 2.2% | ||
| VERT90 | Squat | 1006.89 | (451.76) | 1054.35 | (481.07) | 47.45 | 4.7% | |
| Stoop | 1343.11 | (823.42) | 1322.57 | (771.82) | −20.53 | −1.5% | ||
| Parameter | Lifting Style | Trunk Orient | Knee Force Control [N] | Knee Force EXO [N] | Difference (EXO-Control) | |||
|---|---|---|---|---|---|---|---|---|
| Median | (IQR) | Median | (IQR) | [N] | % | |||
| HOR50 | Squat | ipsi | 126.78 | (142.73) | 101.62 | (146.48) | −25.15 | −19.8% |
| front | 101.04 | (91.74) | 74.35 | (92.33) | −26.69 | −26.4% | ||
| cont | 50.36 | (65.39) | 19.57 | (69.46) | −30.79σ | −61.1% | ||
| Stoop | ipsi | 94.59 | (117.18) | 107.05 | (159.15) | 12.46 | 13.2% | |
| front | 118.36 | (90.48) | 142.74 | (124.94) | 24.39μ | 20.6% | ||
| cont | 29.43 | (33.49) | 4.26 | (58.56) | −25.17μ | −85.5% | ||
| HOR90 | Squat | ipsi | 509.26 | (462.72) | 481.07 | (404.54) | −28.19 | −5.5% |
| front | 284.71 | (173.79) | 258.84 | (238.40) | −25.87 | −9.1% | ||
| cont | 151.54 | (232.13) | 109.48 | (160.99) | −42.06 | −27.8% | ||
| Stoop | ipsi | 361.67 | (233.48) | 406.50 | (313.69) | 44.83 | 12.4% | |
| front | 346.07 | (133.70) | 392.77 | (169.43) | 46.70 | 13.5% | ||
| cont | 70.81 | (67.34) | 60.19 | (88.21) | −10.61 | −15.0% | ||
| VERT50 | Squat | ipsi | 833.72 | (360.54) | 891.83 | (325.38) | 58.10 | 7.0% |
| front | 623.58 | (225.56) | 667.24 | (236.27) | 43.66 | 7.0% | ||
| cont | 393.07 | (290.35) | 387.06 | (261.02) | −6.00 | −1.5% | ||
| Stoop | ipsi | 1125.73 | (771.99) | 1142.44 | (708.87) | 16.72 | 1.5% | |
| front | 1006.42 | (431.70) | 1022.66 | (423.27) | 16.24 | 1.6% | ||
| cont | 413.25 | (324.03) | 439.88 | (323.31) | 26.63 | 6.4% | ||
| VERT90 | Squat | ipsi | 1319.08 | (557.25) | 1387.66 | (541.02) | 68.58 | 5.2% |
| front | 933.70 | (363.33) | 976.06 | (373.88) | 42.36 | 4.5% | ||
| cont | 864.42 | (365.11) | 868.97 | (335.23) | 4.56 | 0.5% | ||
| Stoop | ipsi | 1912.96 | (760.15) | 1858.51 | (796.44) | −54.45 | −2.8% | |
| front | 1396.92 | (510.29) | 1399.91 | (467.59) | 2.99 | 0.2% | ||
| cont | 856.06 | (364.26) | 868.64 | (359.74) | 12.58 | 1.5% | ||
| Support Moment [Nm] | Trunk Orient | Static Task | Squat Lifting | Stoop Lifting | |||
|---|---|---|---|---|---|---|---|
| Median | (IQR) | Median | (IQR) | Median | (IQR) | ||
| 50th Percentile | ipsi | 22.72 | (7.26) | 19.94 | (13.21) | 19.05 | (16.21) |
| front | 23.24 | (4.81) | 20.79 | (15.19) | 20.93 | (16.90) | |
| cont | 22.72 | (7.26) | 19.94 | (13.21) | 19.05 | (16.21) | |
| 90th Percentile | ipsi | NA | NA | 29.15 | (11.97) | 30.25 | (10.43) |
| front | NA | NA | 32.04 | (10.61) | 32.23 | (11.09) | |
| cont | NA | NA | 29.15 | (11.97) | 30.25 | (10.43) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bär, M.; Luger, T.; Seibt, R.; Gabriel, J.; Rieger, M.A.; Steinhilber, B. Effects of a Passive Back-Support Exoskeleton on Knee Joint Loading during Simulated Static Sorting and Dynamic Lifting Tasks. Int. J. Environ. Res. Public Health 2022, 19, 9965. https://doi.org/10.3390/ijerph19169965
Bär M, Luger T, Seibt R, Gabriel J, Rieger MA, Steinhilber B. Effects of a Passive Back-Support Exoskeleton on Knee Joint Loading during Simulated Static Sorting and Dynamic Lifting Tasks. International Journal of Environmental Research and Public Health. 2022; 19(16):9965. https://doi.org/10.3390/ijerph19169965
Chicago/Turabian StyleBär, Mona, Tessy Luger, Robert Seibt, Julia Gabriel, Monika A. Rieger, and Benjamin Steinhilber. 2022. "Effects of a Passive Back-Support Exoskeleton on Knee Joint Loading during Simulated Static Sorting and Dynamic Lifting Tasks" International Journal of Environmental Research and Public Health 19, no. 16: 9965. https://doi.org/10.3390/ijerph19169965
APA StyleBär, M., Luger, T., Seibt, R., Gabriel, J., Rieger, M. A., & Steinhilber, B. (2022). Effects of a Passive Back-Support Exoskeleton on Knee Joint Loading during Simulated Static Sorting and Dynamic Lifting Tasks. International Journal of Environmental Research and Public Health, 19(16), 9965. https://doi.org/10.3390/ijerph19169965